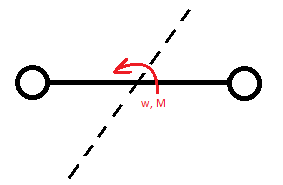
Hallo, ich versuche gerade ein relativ einfaches System in Matlab/Simulink zu simulieren. Das ganze ist noch eher Neuland für mich. Meine Aufgabe ist es, ein Drehmoment für einen Stab mit 2 Punktmassen zu regeln (siehe Skizze). Als Messgröße habe ich die Winkelgeschwindigkeit um die eingezeichnete Achse. Die Übertragungsfunktion sieht so aus: w' * J = M --> w * s = 1/J * M --> G(s) = 1/(J*s) w' ... Winkelbeschleunigung w ... Winkelgeschwindigkeit M ... Moment J ... Trägheitsmoment Damit ich eine Regelung machen kann, brauche ich aber irgendwie eine Umrechung von Winkelgeschwindigkeit zu Drehmoment. Wie kann ich das machen? lg
Angehängte Dateien:
-

regelung.png
1,2 KB
erklär dein problem nochmal mit anderne worten. willst du simulieren oder regeln? oder beides? wo hängt es? was ist die Stellgröße? Das Moment? dann hast du doch schon die gleichungen hingeschrieben, um die simulation zusammezuklicken. Nimm dazu einfachste Blöcke und nicht die komplett berechnete übertragungsfunktion. und jetzt regeln? also das moment aus omega ableiten? Für so etwas gibt es standard-reglerstrukturen. Davon würde ich eine nehmen: http://de.wikipedia.org/wiki/Regler#Stetige_lineare_Regler
Angehängte Dateien:
-

regler1.png
2,5 KB
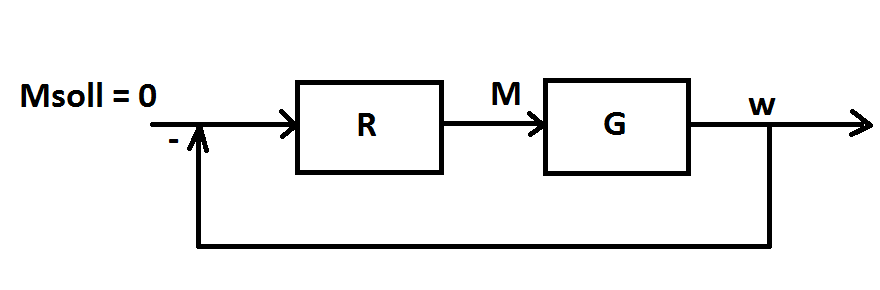
Hallo. Mein Problem ist, dass ich als Eingang von G(s) ein Moment habe, und am Ausgang aber die Winkelgeschwindigkeit. Muss ich für die Regelschleife eine Umrechnung von Winkelgeschwindigkeit zu Drehmoment machen (differenzieren) oder nicht? Später möchte ich eine Kaskadenregelung aufbauen (Winkel -> Winkelgeschwindigkeit -> Drehmoment).
musst du nicht. in der Regelungstechnik wird meist nicht mit Einheiten gerechnet. Das siehst du auch an dem Link, den ich gepostet habe. Beim PI-Regler wird eine Größe und ihr Integral aufaddiert. Das kann von den Einheiten her nicht passen.
korrektur: ach die gewichten das Integral auf Wikipedia mit der Zeit? Okay, dann stimmen die Einheiten tatsächlich überein. Ist aber auch kein Problem, denn Einheiten kann man einfach durch einen konstanten Faktor umrechnen. Um die Verwirrung aufzuklären: Stell dir einen P-Regler f vor. M = k * deltaOmega die Einheit von k ist dann eben Nm/(rad/sec) Differenzieren darfst du im Regler trotzdem nicht, denn dies würde die Dynamik beeinflussen und du hättest einen D-Regler anstatt eines p-reglers.
Hallo rava! > musst du nicht. > in der Regelungstechnik wird meist nicht mit Einheiten gerechnet. Unsinn! Die Einheiten müssen stimmen, sonst kann nichts passendes rauskommen. > Das siehst du auch an dem Link, den ich gepostet habe. > Beim PI-Regler wird eine Größe und ihr Integral aufaddiert. Das kann von > den Einheiten her nicht passen. Nein, du übersiehst, dass die einzelnen Skalierungsfaktoren (P, I, D) auch noch Einheiten haben. Und jetzt rate mal warum das so ist... Zur Ausgangsfrage: M=J*alpha, und alpha=omega' (Winkelgeschwindigkeit). Mit freundlichen Grüßen Thorsten Ostermann
Klar ist mir das noch nicht! Wenn die Einheiten stimmen sollen, muss ich irgendwie ableiten!!?? Oder gehe ich davon aus, dass mein KP (im Falle eines P-Reglers) beliebige Einheiten annehmen kann? Und ja: M = J * alpha, alpha = omega'
Regler schrieb: > Oder gehe ich davon aus, dass mein KP (im Falle eines P-Reglers) > beliebige Einheiten annehmen kann? genau das ist der Trick. stell dir den p-Regler so vor: k = 0.4 Nm/(rad/sec) Wenn deine Drehzahlabweichung 1rad/sec ist, produziert dein Regler ein Gegenmoment von 0.4Nm Thorsten Ostermann schrieb: > Unsinn! tonfall!
Die Regelungstechniker machen sich das aber ganz leicht^^ Scherz. Vielen Dank für eure Bemühungen. Ich werde mich nun etwas näher damit beschäftigen und mich eventuell wieder melden. lg
Hallo rava! > Thorsten Ostermann schrieb: >> Unsinn! > > tonfall! Zitier bitte nicht sinnentstellend. Ich hatte schon begründet, warum das Unsinn ist. Mit freundlichen Grüßen Thorsten Ostermann
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.