Hallo liebe Community,
für ein Studienprojekt programmieren wir eine Regelung für einen
Aufwärtswandler mit einem STM32 Discovery.
Der Aufwärtswandler soll mit einer Frequenz von 40kHz getaktet werden.
Das Tastverhältnis ist dabei von zwei analogen, eingelesenen Werten
abhängig(Strom und Spannung).
Unsere Idee ist, den ADC über einen Timer-Interrupt alle 25µs (1/40kHz)
einzulesen und dann an die Regelung weiterzugeben. In der ISR befinden
sich dann die Funktionen zum Abrufen des ADC Wertes und zum Aufruf der
Regelung. Zudem toggeln wir einen Pin, um zu überprüfen, dass das
Programm alle 25µs in die ISR springt. Letzteres ist durch die
Implementierung der Funktion zum Abrufen des ADC Wertes nicht mehr
gegeben, da der Pin dann nur noch alle 142µs getoggelt wird.
Folglich dauert unsere AD-Wandlung zu lange. Hat jemand eine Idee zur
Lösung unseres Problems.
Es ist unser erster Post. Ich hoffe das ist so okay. Sollte ihr noch
Fragen haben, beantworten wir die euch gerne.
Hier der Code(Projekt im Anhang):
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO,ENABLE);//Einschalten des Taktsignals für PortA sowie AFIO Register
185
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);//Einschalten des Taktsignals des Timers 2
186
187
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//Wahl der Mode Alternate Function Push-Pull
188
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_7;//Auswahl des Pins, hier PIN PA0
189
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;////Einstellung der Geschwindigkeit, hier 50MHz
190
GPIO_Init(GPIOB,&GPIO_InitStructure);//Initialisiert die eben zuvor eingestellten Werte von Mode,Pin, Speed
191
192
TIM_TimeBase_InitStructure.TIM_ClockDivision=TIM_CKD_DIV1;// Vorteiler für Takt, aber nur bei externer Clock notwendig
193
TIM_TimeBase_InitStructure.TIM_CounterMode=TIM_CounterMode_Up;// Einstellen der Zähler-Mode, hier Aufwärtszählen
194
TIM_TimeBase_InitStructure.TIM_Period=99;//Wert bis zu dem Timer zählt
195
TIM_TimeBase_InitStructure.TIM_Prescaler=5;// Teilt den Eingangstakt(24MHz) um den Faktor (TIM_Prescaler+1), hier also 24
196
TIM_TimeBaseInit(TIM4,&TIM_TimeBase_InitStructure);// Initialisiert die eben zuvor eingestellten Werte von Clock Division, Counter Mode, Period, Prescaler
197
198
TIM_OC_InitStructure.TIM_OCMode=TIM_OCMode_PWM1;//Einstellen der PWM-Funktionalität, bei PWM1 liegt Ausgang während der Pulsdauer auf high und anschließend auf low, PWM2 wäre invertiert
Mache zu erst einmal eine Analyse wie lange der zeitkritische Code denn
überhaupt benötigt. Hier ein Demo "Taktzeitberechnung und Überwachung":
http://www.mikrocontroller.net/articles/STM32_f%C3%BCr_Einsteiger#Taktzeitberechnung_und_.C3.9Cberwachung
Ansonsten würde ich die AD Wandlung nicht mit dem Interrupt erst
starten, sondern nonstop laufen lassen und mittels DMA irgend wo hin
kopieren.
Somit stehen die aktuellen Werte immer schon von alleine im RAM und man
muss nicht extra darauf warten.
Wieso muss die AD Wandlung genauso schnell wie die PWM-Ausgabe sein?
Wir machen z.B. eine PWM mit 16 kHz, wobei die Regelung und dabei auch
die AD Wandlung nur mit 1 kHz läuft. Da wird dann halt das gleiche
DutyCycle für mehrere Perioden ausgegeben.
Benjamin K. schrieb:> Wir machen z.B. eine PWM mit 16 kHz, wobei die Regelung und dabei auch> die AD Wandlung nur mit 1 kHz läuft. Da wird dann halt das gleiche> DutyCycle für mehrere Perioden ausgegeben.
Erstens das.
Zweitens: wie schnell der ADC ist, findet man nicht per Trial and Error
heraus, sondern mithilfe des Datenblattes.
Warum keimt da nur der Verdacht aus, dass dieses Programm nicht nur so
zusammenkopiert aussieht, sondern auch ist?
Markus Müller schrieb:> Mache zu erst einmal eine Analyse wie lange der zeitkritische Code denn> überhaupt benötigt. Hier ein Demo "Taktzeitberechnung und Überwachung":> http://www.mikrocontroller.net/articles/STM32_f%C3%BCr_Einsteiger#Taktzeitberechnung_und_.C3.9Cberwachung>> Ansonsten würde ich die AD Wandlung nicht mit dem Interrupt erst> starten, sondern nonstop laufen lassen und mittels DMA irgend wo hin> kopieren.> Somit stehen die aktuellen Werte immer schon von alleine im RAM und man> muss nicht extra darauf warten.
Danke für deine schnelle Antwort Markus.
Wir haben versucht das mit der Taktzeitberechnung in den Code zu
integrieren. Leider bekommen wir dann Fehlermeldungen("undefined
reference to `CORE_ClearSysTick'" und "undefined reference to
`CORE_GetSysTick").
Auch möchten wir dir für den Tipp danken, den ADC-Wert ausserhalb des
Interrupts aufzurufen!
Dennoch bleibt die Frage offen, warum der ADC solange braucht.
Der Bus an dem der ADC hängt, läuft mit 24MHz. Wir haben einen clock
divider von 4 eingestellt, wodurch eine Taktfrequenz von 6MHz übrig
bleibt. Wie lasen, dass die ADC-Wandlung mit 12,5 Zyklen angegeben ist,
die sample-Time haben wir auf das Minimum von 1,5 Zyklen eingestellt.
Folglich sollte der ADC mit einer Frequenz von über 400kHz arbeiten und
damit eigentlich schnell genug sein, oder haben wir als absolute
Anfänger da was falsch verstanden?
Benjamin K. schrieb:
>Wieso muss die AD Wandlung genauso schnell wie die PWM-Ausgabe sein?>Wir machen z.B. eine PWM mit 16 kHz, wobei die Regelung und dabei auch>die AD Wandlung nur mit 1 kHz läuft. Da wird dann halt das gleiche>DutyCycle für mehrere Perioden ausgegeben.
Auch dir vielen Dank für deine schnelle Antwort. Wir haben deinen
Vorschlag mal in unserer Matlab/Simulink Simulation getestet, mit dem
Ergebnis, dass es eine Alternative darstellen könnte. Darf man fragen wo
diese Regelung bei dir zum Einsatz kommt? Wir sehen bei unserem
Aufwärtswandler den Spulenstrom als kritisches Element. Der Spulenkörper
ist knapp dimensioniert und könnte bei zu hohem Strom in die Sättigung
gehen. Lieber würden wir die PWM mit 40kHz nachregeln - oder zumindest,
so nah wie möchlich an diesen Wert herankommen.
Hast du die Regelung auch mit einem STM32 realisiert? Wie lange brauch
dein AD-Wandler?
vn nn schrieb:
>Erstens das.>Zweitens: wie schnell der ADC ist, findet man nicht per Trial and Error>heraus, sondern mithilfe des Datenblattes.>Warum keimt da nur der Verdacht aus, dass dieses Programm nicht nur so>zusammenkopiert aussieht, sondern auch ist?
vn nn, auch dir möchten wir für deinen Beitrag danken. Sehr richtig hast
du erkannt, das Teile des Codes kopiert und für unsere Zwecke
abgewandelt wurden. Wie sagt man so schön: "Das Rad muss ja nicht neu
erfunden werden."
Letzten Endes sind wir angehende Energietechniker und unsere Erfahrungen
mit Mikrocontrollern sind gering. Fokus unsere Arbeit lag
dementsprechend nicht auf der Programmierung, sondern auf dem
Schaltungsentwurf und dessen Realisierung.
Weiter oben haben wir beschrieben, was wir dem Datenblatt bezüglich
dessen entnehmen konnten. Offensichtlich spielen allerdings weitere
Faktoren eine Rolle, in der Berechnung der Geschwindigkeit des ADCs.
Für weitere konstruktive Kritik und Tipps, wäre ich auch dir sehr
dankbar.
Viele Grüße
R. W.
Markus Müller schrieb:> Ich dachte das ist in der CMSIS bereits drin. Hier die Defines:> // Sys-Tick Counter - Messen der Anzahl der Befehle des Prozessors:> #define CORE_SysTickEn() (*((u32*)0xE0001000)) = 0x40000001> #define CORE_SysTickDis() (*((u32*)0xE0001000)) = 0x40000000> #define CORE_GetSysTick() (*((u32*)0xE0001004))> #define CORE_ClearSysTick() (*((u32*)0xE0001004)) = 0
Vielen Dank Markus. Wir haben mal die Zeit gemessen, wie lange der
Befehl braucht, um die Funktion GETADC() auszuführen. Für iZ haben wir
ca. 1000 Maschinentakte gemessen. Also sollte sich die Zeit wie folgt
berechnen lassen:
1000/6MHz=166,67µs --> 6000Hz
(6 MHz, weil wir die ADC-Clock durch 4
teilen->RCC_ADCCLKConfig(RCC_PCLK2_Div4))
Warum werden denn so viele Maschinentakte benötigt?
Die Maschinentakte sind schon richtig, aber die Zeit ist falsch.
Ich weiß jetzt nicht genau welcher STM32 auf dem Demo-Board steckt und
wie "SystemInit();" den STM32 initialisiert.
Somit sollte man:
1000 / 24MHz = 41,6µS
rechnen. (CPU Takt und nicht AD Takt)
Wie While Schleife in GETADC() benötigt die Takte.
Edit: Wenn Ihr nicht genau wisst mit welcher Frequenz der µC arbeitet,
so kann diese auf den MCO Pin ausgegeben werden.
Markus Müller schrieb:> Die Maschinentakte sind schon richtig, aber die Zeit ist falsch.> Ich weiß jetzt nicht genau welcher STM32 auf dem Demo-Board steckt und> wie "SystemInit();" den STM32 initialisiert.>> Somit sollte man:> 1000 / 24MHz = 41,6µS> rechnen. (CPU Takt und nicht AD Takt)>> Wie While Schleife in GETADC() benötigt die Takte.>> Edit: Wenn Ihr nicht genau wisst mit welcher Frequenz der µC arbeitet,> so kann diese auf den MCO Pin ausgegeben werden.
CPU Takt sind 24MHz. Wir haben mit dem AD Takt gerechnet. Dann nochmals
vielen Dank, wir können morgen erst alles mit einem Oszi genauer testen.
Tut Euch einen Gefallen und triggert den ADC mit dem PWM-Timer. Der
PWM-Timer läuft dabei im Center Aligned Mode und der ADC wird genau im
Mittelpunkt getriggert. Der Regler wird dann im ADC-Interrupt
ausgeführt. Damit habt ihr die geringstmögliche Totzeit und schließt
alle Effekte durch den Schaltripple aus. Außerdem würde ich die
Messungen mehrfach wiederholen (mindestens 2, besser 4 Messungen pro
Kanal) und eine Mittelung durchführen. Damit wird man etwas unanfälliger
gegenüber Störungen.
Embedded schrieb:> Tut Euch einen Gefallen und triggert den ADC mit dem PWM-Timer. Der> PWM-Timer läuft dabei im Center Aligned Mode und der ADC wird genau im> Mittelpunkt getriggert. Der Regler wird dann im ADC-Interrupt> ausgeführt. Damit habt ihr die geringstmögliche Totzeit und schließt> alle Effekte durch den Schaltripple aus. Außerdem würde ich die> Messungen mehrfach wiederholen (mindestens 2, besser 4 Messungen pro> Kanal) und eine Mittelung durchführen. Damit wird man etwas unanfälliger> gegenüber Störungen.
Vielen Dank für den Tipp. Macht alles sehr viel Sinn, was du sagst.
Werden versuchen, dass mit unseren amateurhaften Programmierfertigkeiten
umzusetzen.
@Markus: Ganz vergessen zu erwähnen, dass sich durch weglassen der
while-Schleife die Maschinentakte auf etwa 50 reduziert haben.
@ R. W. (boost)
>@Markus: Ganz vergessen zu erwähnen, dass sich durch weglassen der>while-Schleife die Maschinentakte auf etwa 50 reduziert haben.
Bist du einer der üblichen Trolle oder doch ein sprudelnder Quell
Realsatire?
Waum meinst du, kann man diese while-Schleife weglassen? Do you speak
english? At least some Brocken?
1
while(!ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC)){}//wait for conversion complete
Falk Brunner schrieb:> @ R. W. (boost)>>>@Markus: Ganz vergessen zu erwähnen, dass sich durch weglassen der>>while-Schleife die Maschinentakte auf etwa 50 reduziert haben.>> Bist du einer der üblichen Trolle oder doch ein sprudelnder Quell> Realsatire?> Waum meinst du, kann man diese while-Schleife weglassen? Do you speak> english? At least some Brocken?>>
1
>while(!ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC)){}//wait for conversion
2
>complete
3
>
Hallo Falk,
du hast schon Recht, wir hatten nicht erwähnt, dass wir den ADC in
continous-Mode geändert haben. Werden dann nicht ständig Werte des ADC
in unsere Variable adc_buffer geschrieben?
Wenn die while-Schleife vonnöten ist, gibt es eine schnellere
Möglichkeit zu überprüfen, dass die Umwandlung abgeschlossen ist?
@ R. W. (boost)
>du hast schon Recht, wir hatten nicht erwähnt, dass wir den ADC in>continous-Mode geändert haben.
Aha. Kleine, aber entscheidene Information!
> Werden dann nicht ständig Werte des ADC>in unsere Variable adc_buffer geschrieben?
Eher nicht. Die neuen Messergebnisse landen im Ergebnisregister des ADC,
nicht in einer Variablen. (Wenn es nicht irgendein Stück SOftware gibt,
welches die Daten kopiert, keine Ahnung was in der Bibliothek
drinsteckt).
>Wenn die while-Schleife vonnöten ist, gibt es eine schnellere>Möglichkeit zu überprüfen, dass die Umwandlung abgeschlossen ist?
Man muss einfach wissen, dass die fertig ist, weil sie fertig sein MUSS.
Wie das geht, wurde hier schon angesprochen.
Beitrag "Re: STM32-Discovery - Implementierung PI-Regelung (für Aufwärtswandler) - Problem: ADC zu langsam"
R. W. schrieb:> du hast schon Recht, wir hatten nicht erwähnt, dass wir den ADC in> continous-Mode geändert haben. Werden dann nicht ständig Werte des ADC> in unsere Variable adc_buffer geschrieben?
Trotzdem braucht der ADC logischerweise eine endliche Zeit, um ein neues
Ergebnis zu liefern!
R. W. schrieb:> Wenn die while-Schleife vonnöten ist, gibt es eine schnellere> Möglichkeit zu überprüfen, dass die Umwandlung abgeschlossen ist?
Nimm doch einen Interrupt!
Embedded schrieb:> R. W. schrieb:>> du hast schon Recht, wir hatten nicht erwähnt, dass wir den ADC in>> continous-Mode geändert haben. Werden dann nicht ständig Werte des ADC>> in unsere Variable adc_buffer geschrieben?>> Trotzdem braucht der ADC logischerweise eine endliche Zeit, um ein neues> Ergebnis zu liefern!>> R. W. schrieb:>> Wenn die while-Schleife vonnöten ist, gibt es eine schnellere>> Möglichkeit zu überprüfen, dass die Umwandlung abgeschlossen ist?>> Nimm doch einen Interrupt!
Verstehen wir dich richtig? Du schlägst vor mit der EOC-Flag den
Interrupt auszulösen und darin die Regelung laufen zu lassen? Uns tut
die blöde Frage leid, aber wie du bestimmt schon gemerkt hast, sind wir
Anfänger.
R. W. schrieb:> aber wie du bestimmt schon gemerkt hast, sind wir> Anfänger.
Daher erst mal das AD-Wandler DMA-Beispiel von ST nehmen und die Werte
beim Aufruf von GETADC() mitteln.
So kann man sich langsam an das gewünschte Endergebnis ran tasten und
dabei lernen.
Wenn Ihr morgen wieder ein Oszi habt, so kann man auch Port-Pins
setzen/löschen bei bestimmten Events, z.B. wenn GETADC() beginnt setzen
und wenn GETADC() endet wieder löschen und man kann so schön sehen
welche Routinen nacheinander aufgerufen werden und wie lange die
brauchen, ist Interessant bei verschachtelten Interrupts die Asynchon
kommen.
R. W. schrieb:> Verstehen wir dich richtig? Du schlägst vor mit der EOC-Flag den> Interrupt auszulösen und darin die Regelung laufen zu lassen? Uns tut> die blöde Frage leid, aber wie du bestimmt schon gemerkt hast, sind wir> Anfänger.
Ja, genau.
Markus Müller schrieb:> R. W. schrieb:>> aber wie du bestimmt schon gemerkt hast, sind wir>> Anfänger.>> Daher erst mal das AD-Wandler DMA-Beispiel von ST nehmen und die Werte> beim Aufruf von GETADC() mitteln.>> So kann man sich langsam an das gewünschte Endergebnis ran tasten und> dabei lernen.>> Wenn Ihr morgen wieder ein Oszi habt, so kann man auch Port-Pins> setzen/löschen bei bestimmten Events, z.B. wenn GETADC() beginnt setzen> und wenn GETADC() endet wieder löschen und man kann so schön sehen> welche Routinen nacheinander aufgerufen werden und wie lange die> brauchen, ist Interessant bei verschachtelten Interrupts die Asynchon> kommen.Embedded schrieb:> R. W. schrieb:>> Verstehen wir dich richtig? Du schlägst vor mit der EOC-Flag den>> Interrupt auszulösen und darin die Regelung laufen zu lassen? Uns tut>> die blöde Frage leid, aber wie du bestimmt schon gemerkt hast, sind wir>> Anfänger.>> Ja, genau.
Vielen Dank euch beiden. Wir werden das alles morgen mal ausprobieren.
Hallo,
wir führen aktuell alle 100µs die unten stehende Befehle aus.
Dabei wird zunächst der aktuelle Wert des ADC in der Variablen
VoltageValue gespeichert, die dann an die Funktion PIControl
weitergegeben wird. Dort wird anschließend je nach gemessener Spannung
eine neue Pulsdauer für das PWM-Signal berechnet. Die Pulsdauer wird
daraufhin mit der Funktion ChangePulseWidth() neu eingestellt.
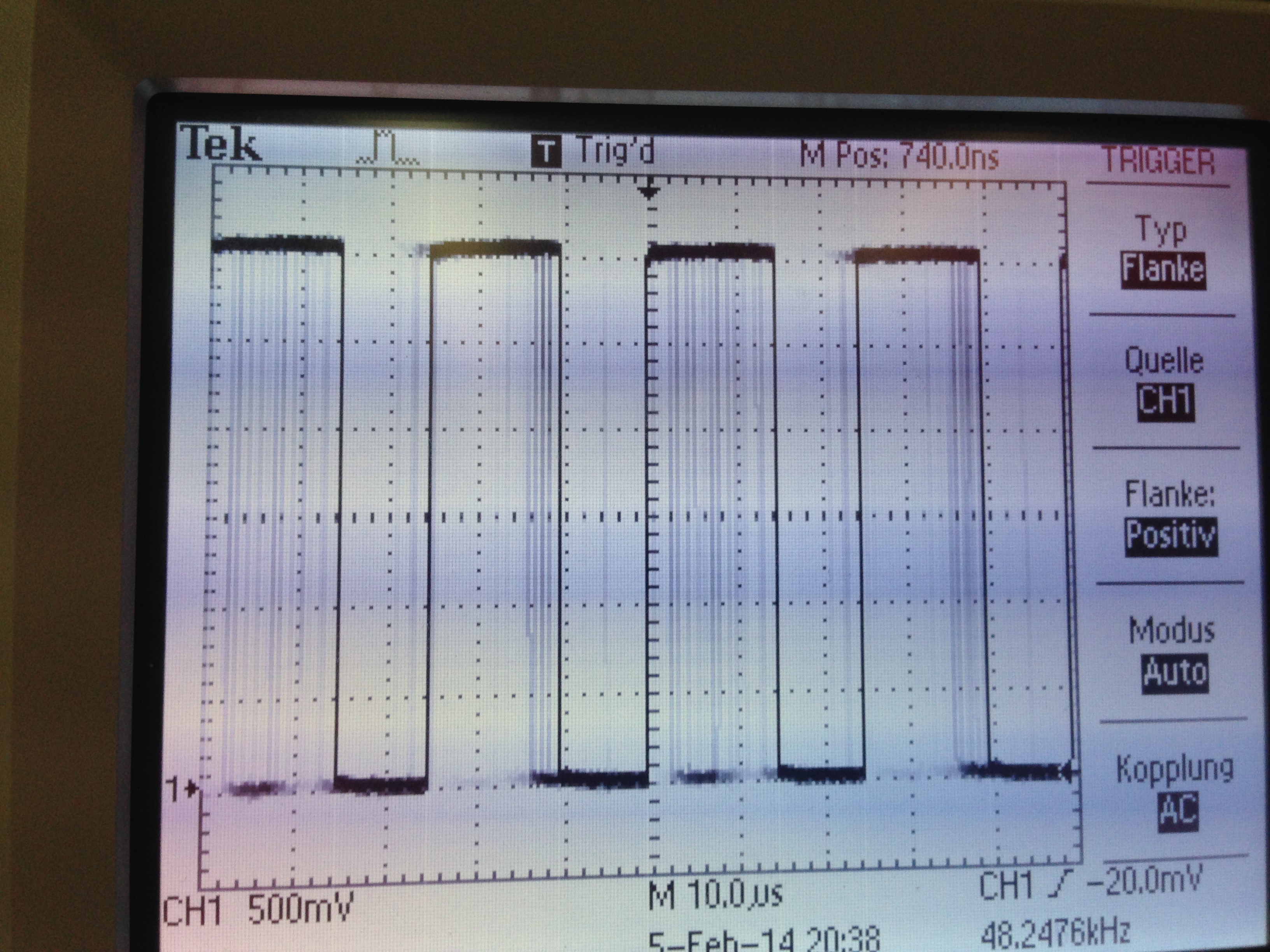
Allerdings bekommen wir kein sauberes PWM Signale erzeugt. Während die
positive Flanke noch deutlich und sauber auf dem Oszi erkennbar ist, so
scheint sich die negative Flanke ständig hin und her zu
verschieben(selbst wenn die Eingangsspannung unverändert bei 0V liegt
und die Pulsdauer somit unverändert bleibt).
Das ausgegebene Signal ist im Anhang Foto2 zu entnehmen.
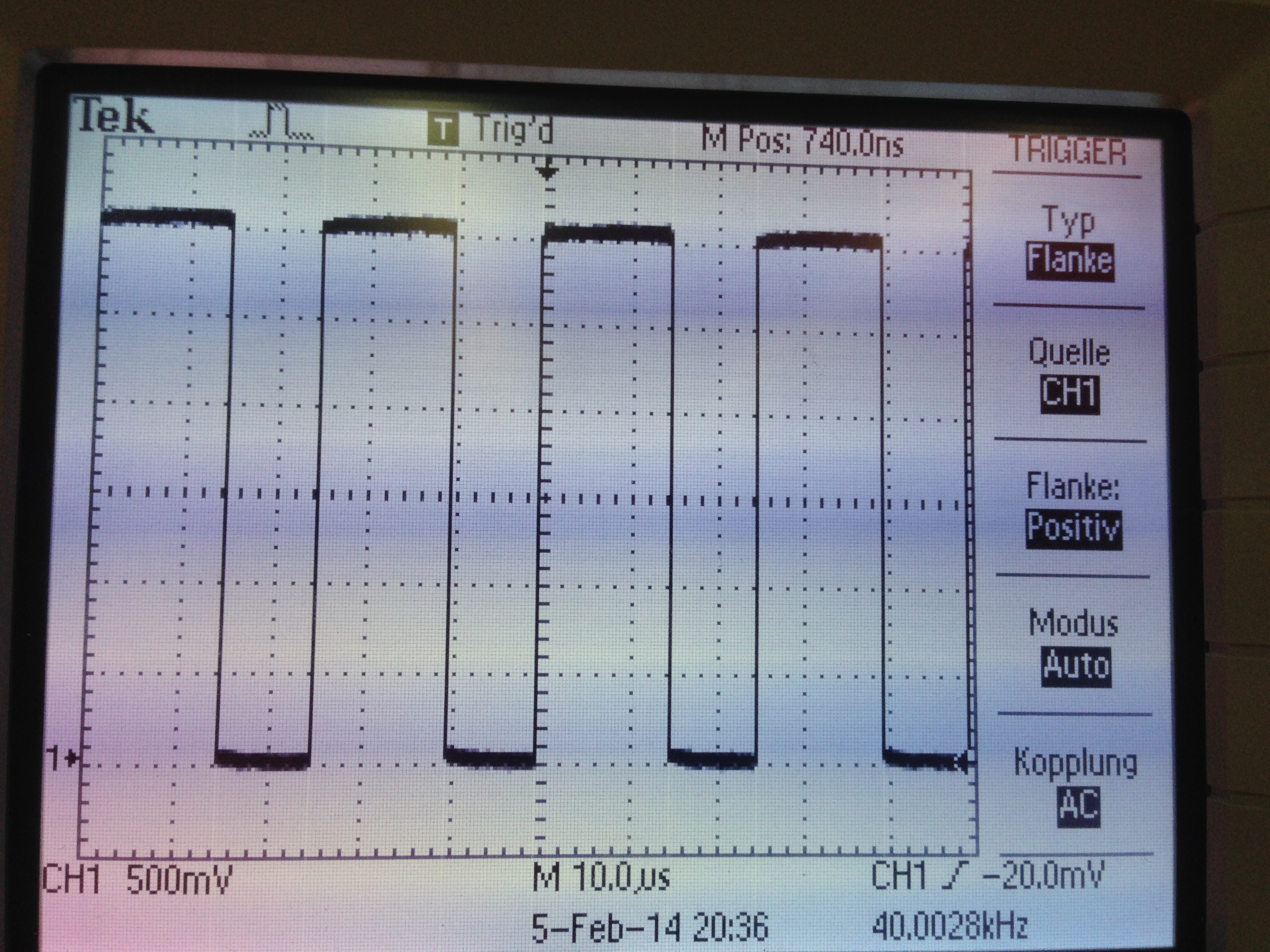
Sobald wird die Befehle nur jede Sekunde ausführen, erhalten wir ein
sauberes PWM Signal mit der entsprechenden Pulsdauer(siehe Foto1).
Wir würden die neu erzeugte Pulsdauer jedoch alle 100µs(bzw. noch
schneller) neu schreiben. Weiß jemand woran es liegen könnte, warum das
nicht funktioniert?
Wenn wir das Programm debuggen, läuft alles wie geplant(Variablen haben
alle den entsprechenden korrekten Wert und das Ausgangssignal sieht so
aus wie es aussehen soll).
R. W. schrieb:> Wir würden die neu erzeugte Pulsdauer jedoch alle 100µs(bzw. noch> schneller) neu schreiben. Weiß jemand woran es liegen könnte, warum das> nicht funktioniert?
Vermutlich schaukelt sich die Regelung auf.
Wenn die Ausgangsgröße eingelesen wird, kann die ja noch eine Weile
weiter ansteigen (oder absinken) bis endlich per Software
entgegengewirkt wird. Wenn es dann soweit ist muss das ganze dann eben
in die Gegenrichtung, welche dann nun Überproportional ausfällt.
Somit schwingt das Ganze.
Ich denke die bessere Lösung wäre hier den "analog watchdog" zu
verwenden.
Danke für deine Antwort gege. Die Funktion PIControl enthält aktuell
noch nicht die Regelung. Die Werte vom ADC kommen noch von einer
Gleichspannungsquelle. In PIControl wird lediglich geschaut wie hoch
die Spannung ist und dementsprechend gesagt, bei z.B. 1V soll das
tastverhältnis 20% sein, bei 2V 40%,...
Als erstes würde ich mir eine debug Ausgabe machen und diese über RS232
ausgeben, damit ihr euch die ADC werte mal angucken könnt...
Dann würde ich min 4 mal so schnell messen wie Regeln.
Daher würde ich tatsächlich die Messung durch den PWM Interrupt triggern
und jedes 4 mal oder so den Regler starten. Wichtig ist das ihr das in
eurem Zeitfenster alles hinbekommt. Float würde ich auch versuchen zu
lassen, trotzt FPU. Oder halt langsamer abtasten...
Ich persönlich würde mit 20kHz messen und mit 5kHz regeln. Ist meistens
schnell genug.
Es wäre interessant zu wissen, wann welche Funktionen im Verhältnis zur
PWM ablaufen. Dazu kann man ein Pin toggeln, welches man auf den zweiten
Kanal hängt. Dann ist natürlich die Frage, wie die eingelesenen AD-Werte
zur PWM passen. Wie genau sieht Euro Dummy-Control-Funktion aus? Man
muss ja irgendwie vom 12 Bit-Wert der PWM auf 0-100% (sprich 0 - Inhalt
Period-Register) umrechnen. Wenn das beim durchsteppen passt, sollte da
aber eigentlich kein logischer Fehler drin sein. Aber vielleicht ist die
AD-Messung schlecht? Ich würde da einfach mal eine Messreihe in einem
Array festhalten und per Debugger auslesen. Oder die vorgeschlagene UART
implementieren.
Ingo schrieb:> Daher würde ich tatsächlich die Messung durch den PWM Interrupt triggern> und jedes 4 mal oder so den Regler starten.
Der STM32 kann den ADC direkt über ein Timer Compare Event triggern
(üblicherweise kurz vor dem Umkehrpunkt einer Center Aligned PWM).
Interrupt braucht man dann nicht. Ansonsten gebe ich dir Recht. Man kann
ein Oversampling einbauen, dafür kann man den ADC-Interrupt nehmen.