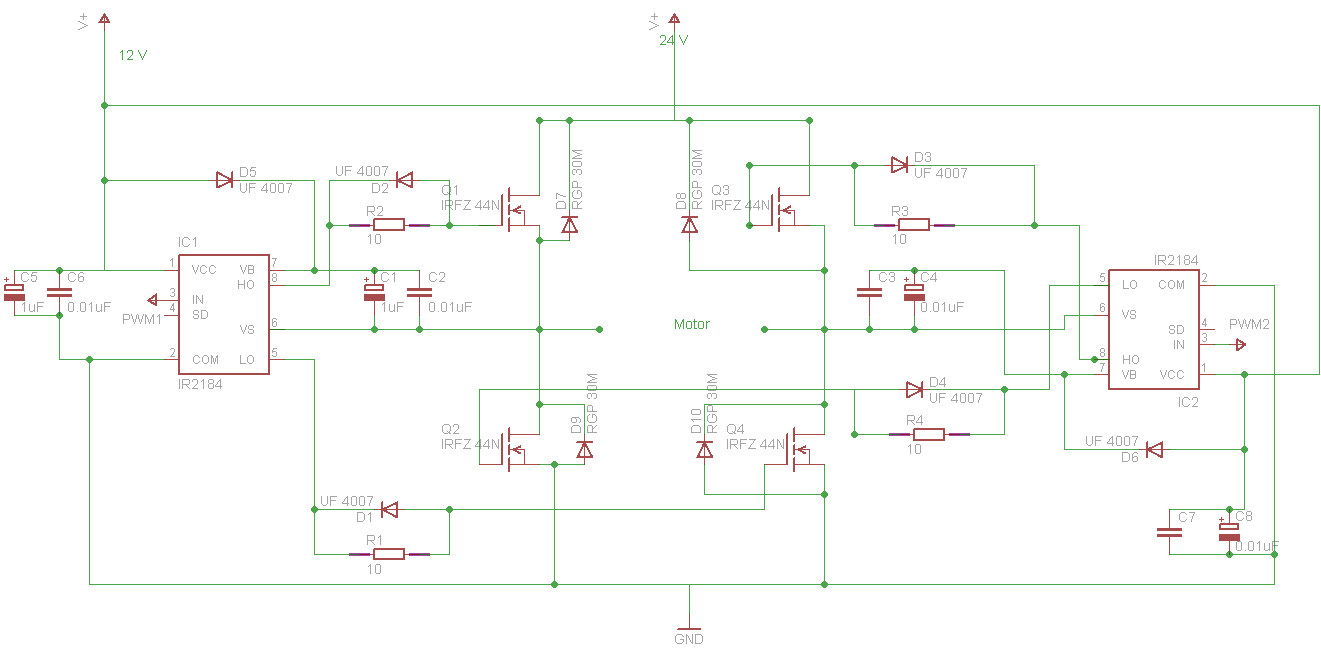
Hallo, wir haben uns in den letzten Tagen ein wenig oder auch ein wenig mehr mit H Brücken auseinander gesetzt. Also in unserem Fall haben wir eine 24V Motor mit ca 10A Dauerstrom also habe ich die Mosfets so gewählt da sie ca 40A mitmachen um auf Nummer sicher zu gehen. Der Motor soll einen vor und Rücklauf haben. Und aktuell frage ich mich wo die Vorteile und Nachteile verschiedener Treiber ist. Nur als Beispiel zu einem IC wie der IR2110 mit 14 Pins und einem IR2184 mit nur 8. Ich weiß, eine sehr oberflächliche Frage aber vielleicht kann mir ja einfach jemand einen für meine Fälle guten Treiber empfehlen und vielleicht auch warum O:-) Außerdem die Bemessung der Kondensatoren der Bootstrap, kommt mir so vor als gäbe es da keine wirklichen fixen Werte sondern eher "Erfahrungsberichte". Wir wollen ein PWM Signal von 1KHz verwenden, das sollte für den Motor ja eigentlich gut geeignet sein, hat da jemand einen guten Richtwert? Eine Sache ist da noch, der Motor wird von 2 12V Gel Batterien die in Reihe geschaltet sind betrieben. Zum Schalten brauchen wir aber ja noch die 12V Spannung für den Treiber. Können wir ohne Probleme die 12V von einer der Batterien abzwacken oder wäre es klüger eine saubere nicht belastete Stromquelle zu verwenden? ich hätte noch weine kleine Roller Batterie die auch 12V bringt und Platztechnisch ist das kein Problem, müsste man nur vorher wissen. Vielleicht könnte ja auch mal jemand einen Blick auf mein bisheriges Werk werfen und mich vor dem Knall eines besseren Belehren. Ich habe auch schon eine Schaltung für einen IR2110 gemacht aber noch nicht Digitalisiert. Besten dank schon mal :)
Angehängte Dateien:
-

PLan1.png
8,8 KB
Hallo! Ich habe mich auch mit H-Brücken auseinander gesetzt in der Vergangenheit. Ich habe einen Schaltplan entworfen und den auch simuliert. Steuerst du diese H-Brücke mit einem Mikrocontroller an? Wenn ja - welchem? Hast schon einen Schaltplan dazu und einen Quellcode? Grüße Imkant
Michael Gerst schrieb: > Also in unserem Fall haben wir eine 24V Motor mit ca 10A Dauerstrom also > habe ich die Mosfets so gewählt da sie ca 40A mitmachen um auf Nummer > sicher zu gehen. Das könnte hinhauen. Dir ist schon klar, dass die 40A nur bei 25°C und keiner Frequenz gelten? Schau dir mal die Diagramme im Mosfet-Datenblatt an (SOA, etc). Die 10A sind eine ganzschöne Ansage! Aber sollte machbar sein. Die Mosfets sind sicher aktiv kühlpflichtig. Michael Gerst schrieb: > Und aktuell frage ich mich wo die Vorteile und Nachteile verschiedener > Treiber ist. Zusätzliche Pins kommen meist von zusätzlichen Funktionen. Das steht aber alles im Datenblatt. (Übertemperatur, SlewRate, ...) Michael Gerst schrieb: > Außerdem die Bemessung der Kondensatoren der Bootstrap, kommt mir so vor > als gäbe es da keine wirklichen fixen Werte sondern eher > "Erfahrungsberichte". Diese Erfahrungsberichte sind völlig sinnlos. Höchstens zur gröbsten Orientierung. Den passenden Bootstrapkondensator bekommt man nur durch Versuchen raus. (-> ohne Oszi braucht man garnicht anfangen). Michael Gerst schrieb: > Wir wollen ein PWM Signal von 1KHz verwenden, das sollte für den Motor > ja eigentlich gut geeignet sein, hat da jemand einen guten Richtwert? Das hängt maßgeblich von deinem Motor ab, aber 1 kHz ist insofern hässlich, dass man es sehr sehr sehr gut hört. Darum wird die PWM-Frequenz meist um die 15kHz bis 20 kHz wählt. Das hört man nicht mehr (so gut) und die Schaltverluste sind noch nicht all zu hoch. Im allgemeinen: So niedrig wie möglich (-> Schaltverluste) und so hoch wie nötig.
K. O. schrieb: > Steuerst du diese H-Brücke mit einem Mikrocontroller an? Wenn ja - > welchem? Hast schon einen Schaltplan dazu und einen Quellcode? Meister mach deinen eigenen Thread auf. Das hat hiermit nichts zu tun. Ist sehr unhöflich.
K. O. schrieb: > Steuerst du diese H-Brücke mit einem Mikrocontroller an? Wenn ja - > welchem? Hast schon einen Schaltplan dazu und einen Quellcode? Wir werden einen Raspberry nutzen da wir die Motoren mit einem PS3 Kontroller Steuern wollen und wir da schon alles haben. Wie wir das PWM Signal generieren machen wir gerade nebenbei da der Raspberry leider 100Hz schafft(wenn man mehr als ein Signal verwendet) und das ist einfach ungeeignet. EE schrieb: > Das könnte hinhauen. Dir ist schon klar, dass die 40A nur bei 25°C und > keiner Frequenz gelten? Schau dir mal die Diagramme im Mosfet-Datenblatt > an (SOA, etc). Die 10A sind eine ganzschöne Ansage! Aber sollte machbar > sein. Die Mosfets sind sicher aktiv kühlpflichtig. OK dann werde ich meine Außwahl noch mal überdenken... Passive Kühlkörper habe ich schon aber Mosfets muss ich eh bestellen. EE schrieb: > Diese Erfahrungsberichte sind völlig sinnlos. Höchstens zur gröbsten > Orientierung. Den passenden Bootstrapkondensator bekommt man nur durch > Versuchen raus. (-> ohne Oszi braucht man garnicht anfangen). Ich besitze zwar keines aber ich habe einen Freund der uns eins besorgen kann, also soll das wohl noch klappen. Alles in allem kann man also sagen dass, der Schaltplan erstmal so funktioniert wir aber halt noch Feinarbeit machen müssen, liege ich da richtig :)
Ist die Wahl des Treibers denn Sinnvoll oder gibt es da bessere Lösungen? Noch dazu habe ich schon oft gelesen das bei Solch hohen Strömen der Aufbau/Anordnung mindestens genau so Wichtig ist wie der Schaltplan. Kann mir da vielleicht noch wer Tipps geben?
D7 bis D10 brauchst Du nicht. Die parasitären Mosfet Dioden reichen völlig. D1 bis D5 sieht man zwar häufig bei 10R am gate kommst Du ohne aus. Das Du bei der Verschaltung niemals den Motor zum laufen bekommst, dafür aber jede Menge tote Mosfet erzeugst ist die bewusst ? Q1 & Q4 müssten zusammen schalten, + Q2 & Q3. Das können die aber nicht weil Du dir die Schaltdiagramme der Treiber nicht angeschaut hast. Hi out und Low out eines dieser Treiber sind niemals zusammen aktiv, sondern abwechselnd mit einer Totzeit dazwischen. Selbst wenn Du das richtig verschaltest brennt der Kram weg so bald der Motor blockiert ist. Du hast keine Überstromdetektion. Einen Treiber kann ich Dir nicht empfehlen. Bei 24V würde ich das ganz anders machen. Ich kann Dir nur empfehlen Dich noch sehr sehr viel intensiver mit der Materie auseinanderzusetzen, die Datenblätter richtig zu lesen und Schaltpläne so sauber und klar strukturiert wie möglich zu zeichnen. Man kann Bauteile z.B. spiegeln und muss die nicht krampfhaft von einer Seite herumverkabeln. Deine Schaltung ist vom Konzept, der Ausführung und grafischen Darstellung ein hoffnungsloses Kuddelmuddel. Viel einfacher für Dich weil nur eine PWM ohne Tricks und Kniffe: - Richtungsumschaltung mit Relais - Drehzahlregelung mit einem Mosfet im GND Kreis des Motors. - Freilaufdiode zwischen Mosfet Drain und +24V nicht vergessen.
Michael Knoelke schrieb: > D7 bis D10 brauchst Du nicht. > Die parasitären Mosfet Dioden reichen völlig. genau das wird überall diskutiert und ich bin zu dem Schluss gekommen, dass zu viel nicht schadet. Ebenso die anderen Dioden oder nicht? Michael Knoelke schrieb: > Hi out und Low out eines dieser Treiber sind niemals zusammen aktiv, > sondern abwechselnd mit einer Totzeit dazwischen. ok, ich sehe es... bin leider davon ausgegangen das es so passt. Aber mal blöd gefragt... wozu ist das umgekehrt? sehe gerade das die Halbbrückentreiber das (fast?) alle haben. Wenn ich den IR2110 nehme kann ich die ja gleich schalten und das Problem fällt weg, liege ich da richtig? Oder kann man mir einen Vollbrückentreiber empfehlen? Michael Knoelke schrieb: > Viel einfacher für Dich weil nur eine PWM ohne Tricks und Kniffe: > - Richtungsumschaltung mit Relais > - Drehzahlregelung mit einem Mosfet im GND Kreis des Motors. > - Freilaufdiode zwischen Mosfet Drain und +24V nicht vergessen. Wäre tatsächlich auch eine Möglichkeit, wollen die bisherigen pläne aber mal nicht direkt über den Haufen werfen.
Angehängte Dateien:
-

plan_a_001.jpg
1,1 MB
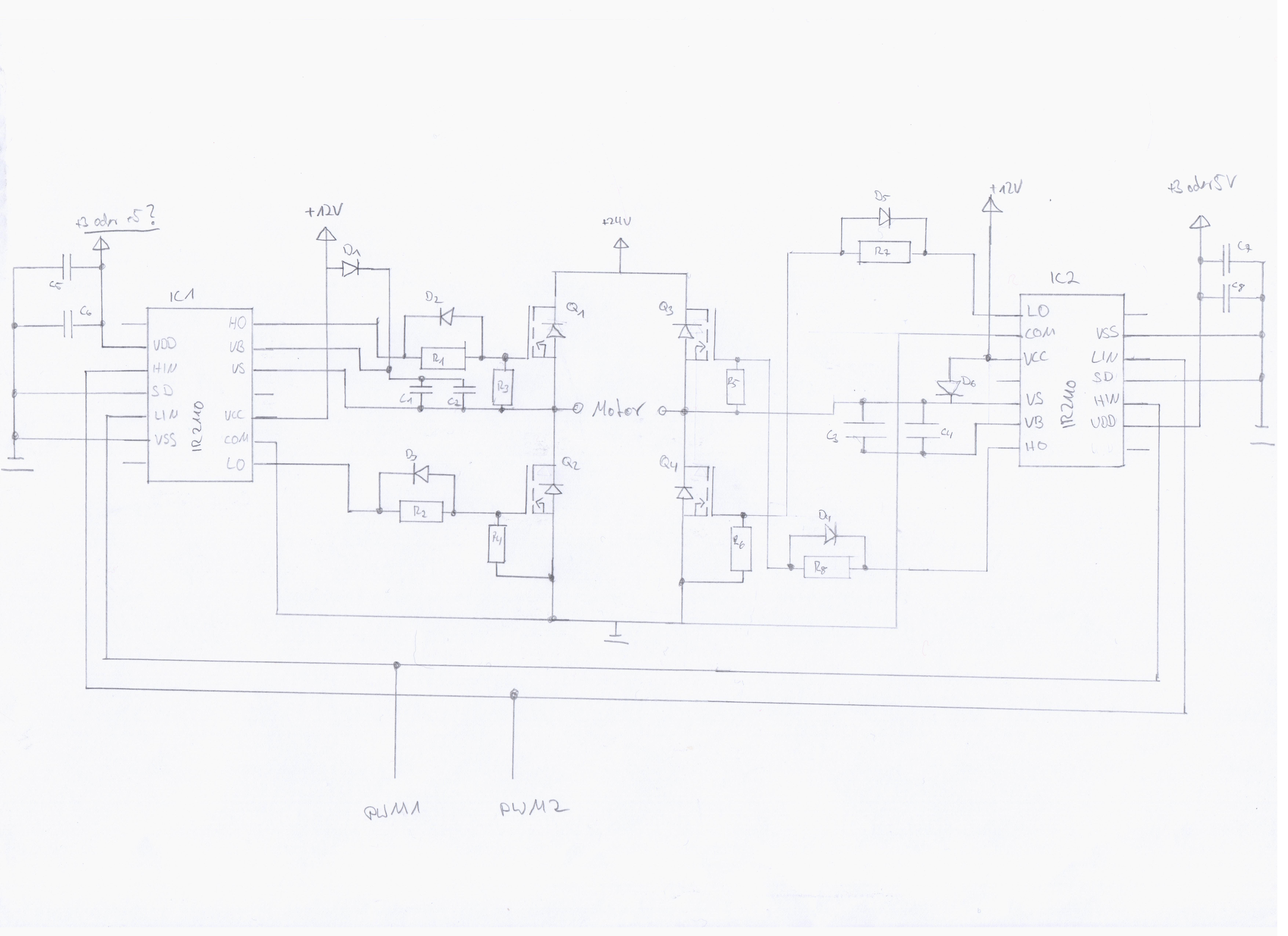
leider noch nicht Digital aber wie sieht es mit dem Schaltplan aus?
Geht es dir nur darum das Ding selber zu bauen? Sonst kauf einfach eine fertige H-brücke mit BTS7960B Chip bei Ebay für 15€. http://www.ebay.de/itm/BTS7960B-43A-Motor-Driver-H-Bridge-module-PWM-Control-smart-car-For-Arduino-/400566060582
Besser aber noch lange nicht gut. 1. Blockierender Motor = Tot durch Überstrom 2. Das geht vom Prinzip nicht ! Diese Halbbrücke kann High oder Low Schalten, aber nicht Nix. Wenn z.B. PWM 1 high ist und Q1 geschaltet und der PWM 2 von Low auf High geht, was passiert denn dann ? Q4 öffnet und nach der Totzeit schließt Q3. Der drehende Motor wird über beide High Side Mos kurzgeschlossen und speist seine gesamte Schwungenergie als Generator in die Schaltung. Das ist als ob Du einen Schraubenschlüssel ins Getriebe werfen würdest. Der Motor steht auf Punkt und die Ströme dabei sind richtig hässlich. Du kannst den Motor also Volllast fahren, Kurzschliessen oder Umpolen, aber nicht im PWM Teillastbetrieb fahren. Du gehst die Funktion einfach nicht im Detail durch obwohl das die Basis von allem ist. Zeichne doch mal Deine verschiedenen PWM Cycle auf und zeichne dazu Deine geschlossenen Fets ein. Dann frage Dich was passiert wenn die Treiber nicht gleich schnell schalten, die PWM nicht synchron kommt, die MCU Quatsch macht etc. pp. In allen Fällen zerlegt sich das Ding sofort. Michael Gerst schrieb: > wollen die bisherigen pläne aber > mal nicht direkt über den Haufen werfen. Welche Pläne ? Das ist grob skizzierter falsch abgemalter Quatsch. Eine Vollbrücke braucht 4 separat zu erzeugende Steuersignale + Schutzfunktionen + ausgetüftelte Pulsmuster.
Michael Knoelke schrieb: > Q4 öffnet und nach der Totzeit schließt Q3. > Der drehende Motor wird über beide High Side Mos kurzgeschlossen und > speist seine gesamte Schwungenergie als Generator in die Schaltung. > Das ist als ob Du einen Schraubenschlüssel ins Getriebe werfen würdest. > Der Motor steht auf Punkt und die Ströme dabei sind richtig hässlich. Einspruch^^ wenn Q3 nicht schließen würde, würde der Motorstrom durch die Bodydiode von Q3 weiterfließen -> Verluste an der Diode. Durch das Schalten von Q3 überbrückt man die Diode -> "aktiver Freilauf". Der Motorstrom klingt langsam ab aufgrund des Wicklungswiderstands (und der MOSFET-Widerstände). Machen soweit ich weiß alle Motortreiber so. Der Motor lässt sich so natürlich wunderschön mit Teillast betreiben.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.