Hallo zusammen, Ich habe folgendes Problem, vielleicht kann mir einer von euch helfen. Ich muss mit dem Gyroscope und Beschleunigungssensor die Neigungswinkel von einem Auto bestimmen. Ich habe die Neigungswerte Pitch und Roll, die die Neigung gegenüber der Vertikalen in y- und x-Richtung angeben. Diese Achsen stehen senkrecht aufeinander und liegen in der Horizontalebene. Ich möchte nun die Neigung des Autos bzw. der Sensorträger im Raum berechnen und komm da irgendwie nicht drauf. Einfaches Beispiel: wenn ich das Auto nur um die y-Achse drehe, ändert sich nur der Pitch-Winkel und meine Neigung im Raum entspricht diesem Pitch-Wert. Gleiches gilt, wenn ich nur um die x-Achse drehe, entspricht meine Neigung dem Roll-Wert. Problem: Drehe ich das Auto um die x- und die y-Achse seh ich keinen Stich mehr wäre für Hilfe sehr dankbar! Grüße
Angehängte Dateien:
-

1.jpg
56 KB
Andy R. schrieb: > Problem: Drehe ich das Auto um die x- und die y-Achse seh ich keinen > Stich mehr Es kommt auf die Reihenfolge der Drehung drauf an und die ist Konventionssache. http://de.wikipedia.org/wiki/Euler-Winkel
danke für deine Antwort.ja ich verstehe die Euler Winkel. Meine Frage ist mit der berechneten Pitch und Roll kann ich die Neigungswinkel bestimmen?
Leg durch den Urspungspunkt und die beiden Endpunkte der Vektoren eine Ebene. Danach den Winkel zwischen Ebene und einer zur xy-Koordinatensystem planaren Ebene bestimmen. Details dazu kann man ergoolen. Wahrscheinlich auch nicht der schnellste Weg, aber die erste Möglichkeit die mir in den Sinn kam
Du könntest einen Komplementär-Filter verwenden, oder selbst was basteln... Die Gyroskope aufintegriert ergeben den Winkel. Das Problem ist, dass durch Rauschen und Offset-Fehler, der Winkel stark wegdriftet. Um das zu verhindern, kann man den g-Vektor verwenden, den die Beschleunigungsmesser messen. Der Messwert ist aber nur gültig, wenn keine weiteren Beschleunigungen auf deine Sensorik wirken. Aber man kann ja nachrechnen ob beispielsweise der Betrag des g-Vektors "gültig" ist, die Drehraten nicht zu hoch sind oder so... Für kleine Winkel kommt mittels trigonometrischen Gleichungen ein brauchbarer Winkel raus aus den Beschleunigungsmessern um die Gyros zu stützen/korrigieren. Vllt schafft man auch die Offsets in regelmäßigen Abständen zu berechnen. LG
Ich verstehe Deine Frage nicht - wenn das Gyroskop schon die pitch und roll Winkel liefert, welchen Neigungswinkel brauchst Du dann noch??? Auch beim Flugzeug gibt es nur pitch, roll und yaw... Willst Du vielleicht daraus den Anstell- und Schiebewinkel bestimmen --> dann brauchst Du aber zusätzlich einen Windsensor!
Machste das Kreuzprodukt deiner beiden Vektoren: http://de.wikipedia.org/wiki/Kreuzprodukt Dann haste die Normale auf deinen beiden Vektoren Dann nimmste einen Vektor, der genau nach oben zeigt, z.B. xyz=>(0/0/1) uns setzt ihn zusammen mit deinem Vektor oben in folgende Gleichung ein: http://de.wikipedia.org/wiki/Schnittwinkel_(Geometrie)#Schnittwinkel_zweier_Fl.C3.A4chen Dabei ist der obere Teil das Skalarprodukt beider Vektoren (x1*x2+y1*y2+z1*z2) und der untere Teil das Produkt beider Vektorlängen. Dann machste den Arcsinus aus dem erhaltenen Wert und voila haste dem Winkel der Autoebene bezüglich der Schwerkraftsnormalen
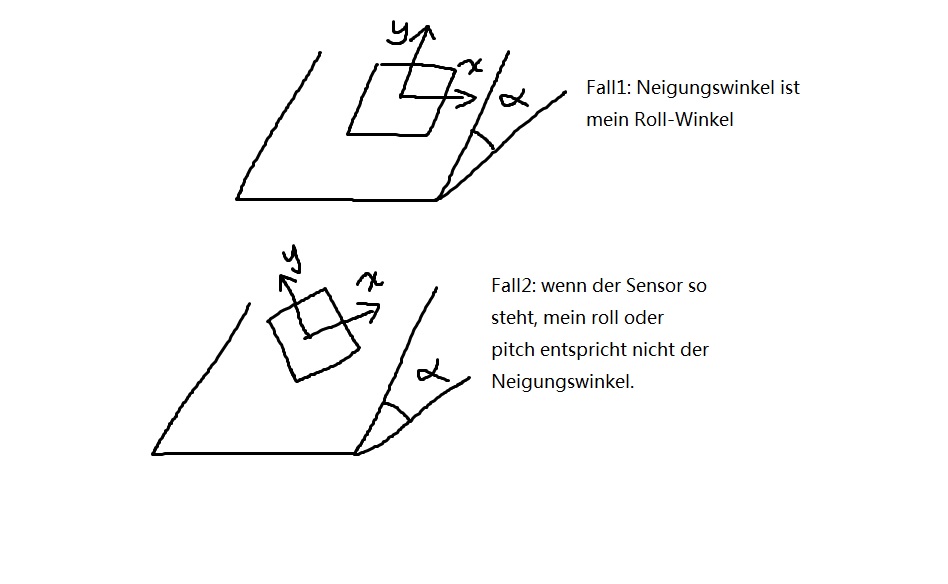
vielleicht habe ich nicht gut erklärt. Für den Fall2 kann ich schon die pitch und roll meinem Sensor bestimmen.Mein Problem besteht nun darin, aus diesem beiden Winkeln(pitch und roll), den Winkel zwischen der "sensor-Ebene" zur "Nullebene" zu berechnen also alpha(siehe Bild). Grüße
Ich habe Acc und Gyro benutzt und mit einem KalmanFilter die beiden fusioniert.die pitch und roll habe ich ausgerechnet. Nun die Frage ist wie berechne ich mit den beiden Winkeln die Winkel zwischen der 'sensor-ebene' und der 'Nullebene'. Grüße
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.