Hallo, ich habe hier einen Schrittmotor von Pollin (310453), der zwar augenscheinlich ein recht gutes Haltemoment hat, doch bei meinen ersten Tests mit einer Ansteuerung mithilfe des PBL3717A gibt es für meinen Geschmack relativ viele Aussetzer so dass Schritte übersprungen werden... Es dreht nur die nackte Welle ohne Last... Ich meine 0,38Nm Haltemoment sind ja immerhin 380Gramm mit einem Hebel von einem Meter. Da hätte ich erwartet, dass ich direkt an der Welle eine enorme Kraft spüren müsste, dem ist aber nicht so... Der Motor wird mit 12V versorgt. Der Sense Widerstand ist 0,48 Ohm. Ist zwar schwierig zu mutmaßen, aber möglicherweise habe ich irgendwelche dummen Anfängerfehler begangen auf die ihr mich aus der Ferne aufmerksam machen würdet? Danke und schönen Restsonntag.
Schrittmotor schrieb: > Ich meine 0,38Nm Haltemoment sind ja immerhin 380Gramm mit einem Hebel > von einem Meter. Das würde ich noch einmal nachrechnen. > Ist zwar schwierig zu mutmaßen, aber möglicherweise habe ich > irgendwelche dummen Anfängerfehler begangen auf die ihr mich aus der > Ferne aufmerksam machen würdet? Du zeigst weder Schaltung noch Programm. Was soll man dann dazu sagen? > Danke und schönen Restsonntag. Dir auch noch einen schönen Palmensonntag!
Oh, stimmt, um eine Zehnerpotenz verrechnet. 1kg = 10N Damit wären 0,38Nm aber immernoch 38g auf einen Meter und doch erheblich 3,8kg auf einen Zentimeter. Die Achse selbst hat ca. 5mm Durchmesser, d.h. an der Achse selbst muss die Kraft ca. 7kg Haltemoment betragen. Ich habe zwar keinen Kraftmesser hier, aber diese Kraft wird garantiert nicht aufgebracht... Irgendwie ist der Motor einfach nicht so stark, wie ich es aufgrund seines Haltemoments erwarten würde. Zu der Ansteuerung: Der Schaltplan entsprich exakt demjenigen des Datenblattes mit einem Unterschied: In Ermangelung von 1Ohm Widerständen habe ich für den Sense-Resistor 0,47Ohm verwenden müssen. Die Software sieht so aus, dass ich Die vier IO-Ports auf "low" gesetzt habe und die Phase immer Viertelperiodisch high und low setze. P1-Low P2 Low P1-High P2 Low P1-High P2 High P1-Low P2 High Jeweils 100ms Wartezeit zwischen den einzelnen Umschaltprozessen.
Das kann mehrere Gründe haben, da kann man ohne Schalung nicht viel zu sagen. 1.) Das Haltemoment gilt nur bei den Vollschritten. 2.) In Bewegung gibt es einen gegen EMK der deinem Strom und damit dem EMK entgegen wirkt. Je schneller sich der Schrittmotor bewegt um so größer ist der gegen EMK. Daher eignet sich ein Schrittmotor auch nicht wirklich gut als Antriebsmotor. Diesem wirkt man mit einer geregelten höheren Spannung entgegen, da der Strom für das Halte- oder besser Drehmoment zuständig ist. http://de.wikipedia.org/wiki/Elektromotorische_Kraft 3.) Nimm doch mal ein Messgerät und ermittle den Strom der im Haltezeitpunkt durch die Wicklungen fließt, mit Hilfe des Datenblattes kann man dann das Haltemoment ermitteln. Eventuell passt hier etwas nicht und der Strom ist zu klein. 4.) Prüfe die Schaltung und die Anschlüsse der Motorspulen, eventuell ist hier etwas vertauscht oder gedreht. 5.) Verlinke bitte hier das Datenblatt und deine Schaltung. Kaum einer hier hat Lust die die Rosinen aus der Nase zu ziehen oder bei Pollin ein Datenblatt zu suchen.
Angehängte Dateien:
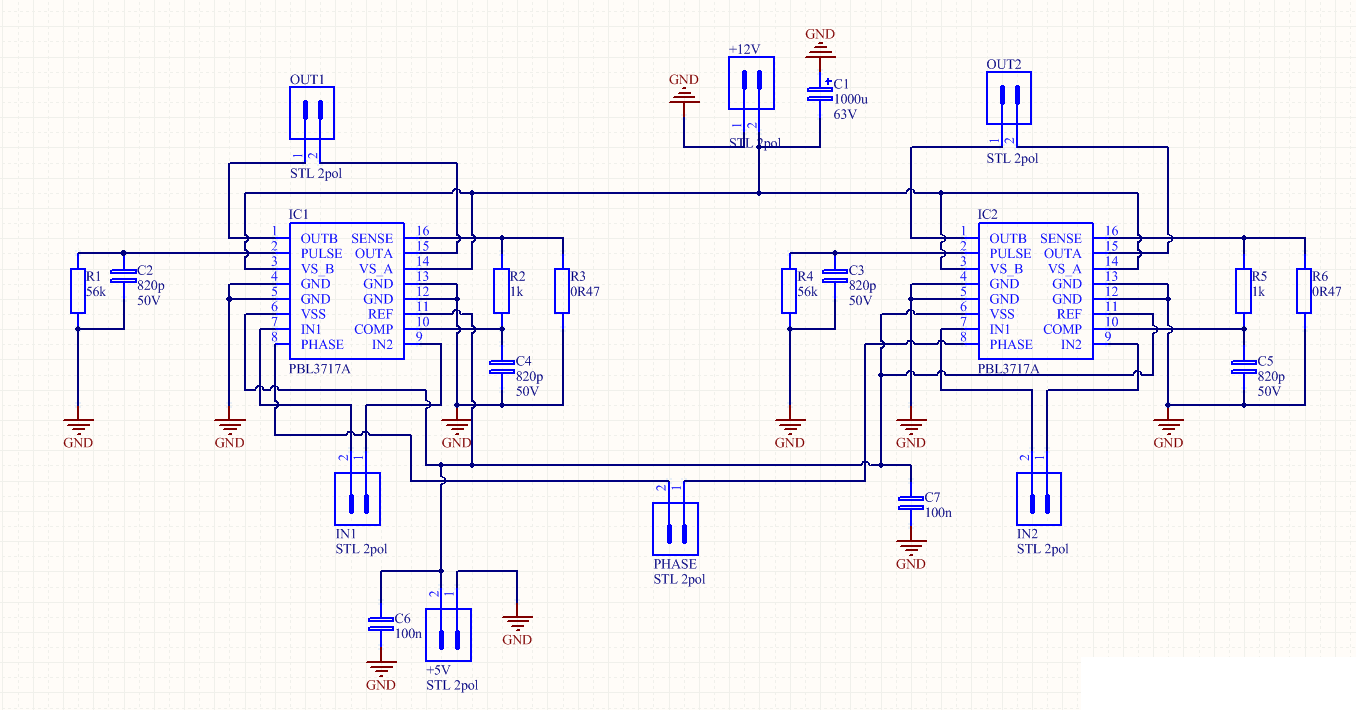
Hier wäre meine Beschaltung.
Schrittmotor schrieb: > Zu der Ansteuerung: > Der Schaltplan entsprich exakt demjenigen des Datenblattes mit einem > Unterschied: In Ermangelung von 1Ohm Widerständen habe ich für den > Sense-Resistor 0,47Ohm verwenden müssen. Dann mußt Du einen Fehler bei der Verdrahtung haben. Der ...3717 ist zwar ein 'ausgedientes' Teil, aber im Ruhezustand bei 1A wird das erwartete Haltemoment für ihn kein Problem sein. Vermutlich funktioniert die Stromregelung nicht. Ich sehe gerade die Daten vom Motor: 12V Strangspannung, das ist schlecht! Nimm einen Motor mit einer deutlich kleineren Strangspannung oder betreib die Schaltung mit >=24V.
Du verwendest ein Treiber mit Chopperbetrieb. So etwas wird verwendet, um dem gegen EMK entgegen zu wirken, daher auch die Sense-Widerstände, die den Spulenstrom messen. https://www.pollin.de/shop/downloads/D101108D.PDF Lese das Datenblatt! Die Betriebsspannung der Schaltung muss deutlich 75%-150% über der Nennspannung des Motors liegen. Ist das nicht der Fall, kann das IC nicht den Nennstrom durch die Spulen schicken. Das Choppern erfolgt durch das Ein- und Ausschalten der Spulen, ist also eine Art PWM für das Halte- oder Drehmoment. Poste bitte hier einmal deine Motordaten, ich kann da später noch mal drüber schauen.
Also das Datenblatt meines Schrittmotors ist das folgende: http://www.pollin.de/shop/downloads/D310453D.PDF Meine VS-Versorgungsspannung beträgt 12V für den Motor. Diese Spannung wird auch als Nennspannung für den Motor angegeben, wobei der Motor mit seinen 30 Ohm Windungen damit 400mA Nennstrom besitzt Das IC nennt als minimale Spannung 10V, sollte also mit 12V keine Probleme haben. Nun zwei Fragen: 1) Wo soll ich aus dem Datenblatt entnehmen können, dass ich für VS deutlich mehr Spannung nehmen soll als die Motor-Nennspannung? 2) Wenn ich mehr Spannung nehme, beschädige ich damit nicht zwangsweise meinen Motor? Der Strom wird doch damit zwangsweise höher als die vom Motor geforderten 400mA.. Und dann mal noch eine dritte Frage: 3) Woher entnehme ich eigentlich, wieviel Strom das IC bei den drei Strom-Modi Low-Current Medium-Current High-Current bereitstellt?
Hi >Wo soll ich aus dem Datenblatt entnehmen können, dass ich für VS >deutlich mehr Spannung nehmen soll als die Motor-Nennspannung? Eine höhere Spannung ist die Bedingung für den Chopperbetrieb. >Wenn ich mehr Spannung nehme, beschädige ich damit nicht zwangsweise >meinen Motor? Der Strom wird doch damit zwangsweise höher als die vom >Motor geforderten 400mA.. Nein. Im Chopperbetrieb misst der IC den Strom durch den Motor über den Sensewiderstand. Bei der eingestellten Schwelle wird der Strom abgeschaltet. >Woher entnehme ich eigentlich, wieviel Strom das IC bei den drei >Strom-Modi >Low-Current >Medium-Current >High-Current >bereitstellt? Im Datenblatt findest du auf S.4 Angaben zum Komparator. Interessant sind Comparator Low Threshold Voltage 78 mV Comparator Medium Threshold Voltage 251 mV Comparator High Threshold Voltage) 416 mV das sind die Spannungen, bei denen (bei Vref=5V) der Strom in den einzelnen Modi abgeschaltet wird. Die Spannung kommt vom Sensewiderstand. Der Rest ist ohmsches Gesetz: Bei 1R Senswiderstand ergeben sich folgende Ströme: Low-Current 78 mA Medium-Current 251 mA High-Current 416 mA Datenblatt im Anhang ist da etwas ausführlicher. MfG Spess
> Wo soll ich aus dem Datenblatt entnehmen können Na ja, der Motor ist halt bei Pollin gelandet, weil es kein vollständiges Datenblatt gibt. Theoretisch könntest du aus den 40mH die Spannung berechnen. Praktisch geht es besser experimentell. 0,4A Strombegrenzung einstellen und schauen, wie viel Spannung du bei der gewünschten Drehzahl für die 0,4A brauchst. >Der Strom wird doch damit zwangsweise höher Wegen diesem Problem benutzt du ja ein so einen aufwendigen Treiber. Unabhängig von der Spannung begrenzt der pbl3717a den Strom. >Woher entnehme ich eigentlich Diese Ströme stellst du selbst ein. Der pbl3717a vergleicht die Spannung an Pin10 mit den Spannungen am Pin11 Spannungsteiler. Du musst nun Rs und Ref so wählen, dass die gewünschten Ströme entstehen. Z.B. du willst 0,4A und Rs ist 1 Ohm. Ergibt 0,4 Volt an Pin10. Brauchst 4,8 Volt an Pin11 ((105+223+223)*4,8)/(6000+105+223+223) = 0,4.
spess53 (Gast) hat das schon gut beschrieben, dem ist eigentlich nichts weiteres hinzu zu fügen. Einfach einmal den Sense-Widerstand berechnen, ich denke, hier kommst du mit einem Ohm sehr gut hin. Im Haltemoment wirkt nur der ohmsche Anteil der Spule und daher sollte das mit deinen 400mA ganz gut passen. Am besten im Betrieb einmal indirekt über die Sense den Spulenstrom ermitteln. Eventuell wäre hierfür ein Oszi ganz gut, dann sieht man auch gleich, ob der Chopper arbeitet. Dann einfach die Betriebsspannung erhöhen, ich den ca. 20V-24V sollte reichen. Aber dabei einmal den Strom im Auge behalten. Danach kannst du einmal die Spannung über die Spulen messen. Wenn der Motor mit einer hohen Winkelgeschwindigkeit betrieben wird, sollte die Spulenspannung durch den Chopper steigen. Das sollte kein Problem darstellen, da die höhere Spannung der Induktion durch die Drehbewegung entgegenwirkt. Der Strom sollte sich dann dabei nicht verändern und bei ca. 400mA liegen. Der Strom ist es, der für deinen Halte- oder Drehmoment verantwortlich ist. Die Spannung ist es, die den Strom treibt. Wenn man den Drehmoment bei einer sehr hohen Winkelgeschwindigkeit braucht, muss die Spannung noch höher werden. Das könnte man sich mit der Spuleninduktivität aus dem Datenblatt und der gewünschten Geschwindigkeit ausrechnen. Ich denke aber, das ist in deinem Fall mit Kanonen auf Spatzen schießen, 24V sollten für deinen Zweck mehr als genug sein.
Ok, euch allen herzlichen Dank für die Hilfe. Das neuere Datenblatt ist ein enormer Gewinn. Ich denke ich werde es heute Abend nochmal mit einer höheren Spannung ausprobieren und mal mit dem Sense-Resistor spielen. 24V sind Dank zweier Bleibatterien kein Problem.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.