Moin, ich arbeite gerade an einem Projekt, bei dem ich bewegte und unbewegte Objekte innerhalb eines Quadratmeters erkennen will. Optische Sensoren oder ander Konzepte fallen auf Grund verschiedener Umgebungsfaktor weg, deshalb bin ich zu oben genanntem Radarmodul gekommen. Nun hab ich mir überlegt mittels FMCW bzw. FSK den Abstand von den Objekten mittels mehreren Modulen, welche um das Quadrat angeordnet sind zu messen. Mit Hilfe der Abstände und Mathematik würde ich dann die Position bestimmen.Ich müsste Abstände von ca 5cm bis 1m mit relativer Genauigkeit von 5cm messen. Nun zu meiner Fragen: Hat schon jemand Erfahrungen mit den oben gennanten Modul zu Genauigkeit, Mindestabstand? Wie macht ihr die Auswertung der Abstände? mit FFT? wie deute ich die Ergebnisse der FFT richtig? Gruß Scorpion_26
Sebastian W. schrieb: > Hat schon jemand Erfahrungen mit den oben gennanten Modul zu > Genauigkeit, Mindestabstand? Hast du schon mal hier im Forum geguckt? Da gibt es ein paar Links, z.B. Beitrag "IVS-465 von InnoSent beschalten / auswerten"
Mike schrieb: > Hast du schon mal hier im Forum geguckt? Da gibt es ein paar Links, z.B. > Beitrag "IVS-465 von InnoSent beschalten / auswerten" Ja, nur wird darin auch nichts beantwortet. Innosent selbst verweisst nur darauf, dass sie selbst nur Hersteller der Hardware sind. Und geben keine Antworten zur Auswertung
Gibt es Literatur zur Auswertung von Radarsensoren mit Hilfe einer DFT/FFT und einem Mikrocontroller? Jemand muss das doch mal nieder geschrieben haben, wie sowas abläuft, oder macht jeder sein eigenes Ding? Für die FMCW sollte ich ja nur die Frequenz am Vtune mit einem DAC ändern und die ankommende Differenzfrequenz aufnehmen. Die Spannung mit ADC lesen und FFT drüber laufen lassen, danach mit der Formel: Abstand=(c0*T*fd)/(2*deltaf) berechnen!? Sollte so funktionieren!? für FSK bin ich mir da noch weniger sicher.
Im Prinzip ja, deine Formel habe ich gerade nicht nachgeprüft, mir ist jedoch etwas unklar was fd sein soll. Hab aber gerade keinen Stift zur Hand Bedenken bei deinem Ansatz aber das die Vuningkennlinie der Module nicht linear ist, ggfs. kann hier durch eine Softwarelinearisierung noch etwas rausgeholt werden.
fd ist die Differenzfrequenz zwischen gesendetem und empfangenem Signal
Angehängte Dateien:
-

IVS_465_mic.png
36 KB
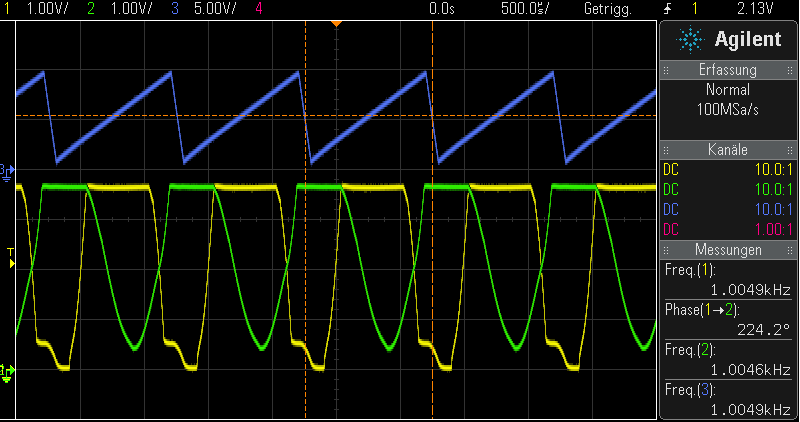
Ich habe heute meine Module vermessen. Kanal1: Sig1 nach meinem Vertärker Kanal2: Sig2 nach meinem Vertärker Kanal3: Ansteuerung des Vtune mit Sägezahn(Low:0,5V High:10V) Ich hätte eig. eine abstandabhängige Frequenz an den Signalausgängen erwartet, nur bekomme ich ein "Rechtecksignal" mit der gleichen Frequenz wie die Modulationsfrequenz. Kann mir vll jemand sagen, was ich falsch mache? Hab ich hier einen groben Denkfehler? mfg Scorpion
Hi Sebastian bist du bei deinem Projekt zum Erfolg gekommen? Ich überlege derzeit eine reine Abstandsmessung von stationären Objekten mit FMCW Modulen durchzuführen. Hast du da villeicht ein paar Tipps oder Dinge die ich dringend beachten sollte? Interessieren würde mich auch was die mindest Reichweite ist. Mein Messbereich soll zwischen 300mm bis 10000mm liegen. Würde mich freuen, wenn du oder das Forum vielleicht ein paar antworten habt. MfG
Nein, ich bin immer noch dabei mich mit dem Thema auseinander zu setzen. Ich hab nun das ankommende Signal mit einer FFT ausgewertet und kann nun mit Hilfe der verschiedenen Frequenzen eine abstandsabhängige Frequenz generieren. Problem ist aktuell, dass ich nur große oder gut refelektierende Objekte erkennen kann, andere gehen leider im Rauschen unter. Kennt jemand eine Möglichkeit dieses Rauschen zu unterdrücken? Gruß
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.