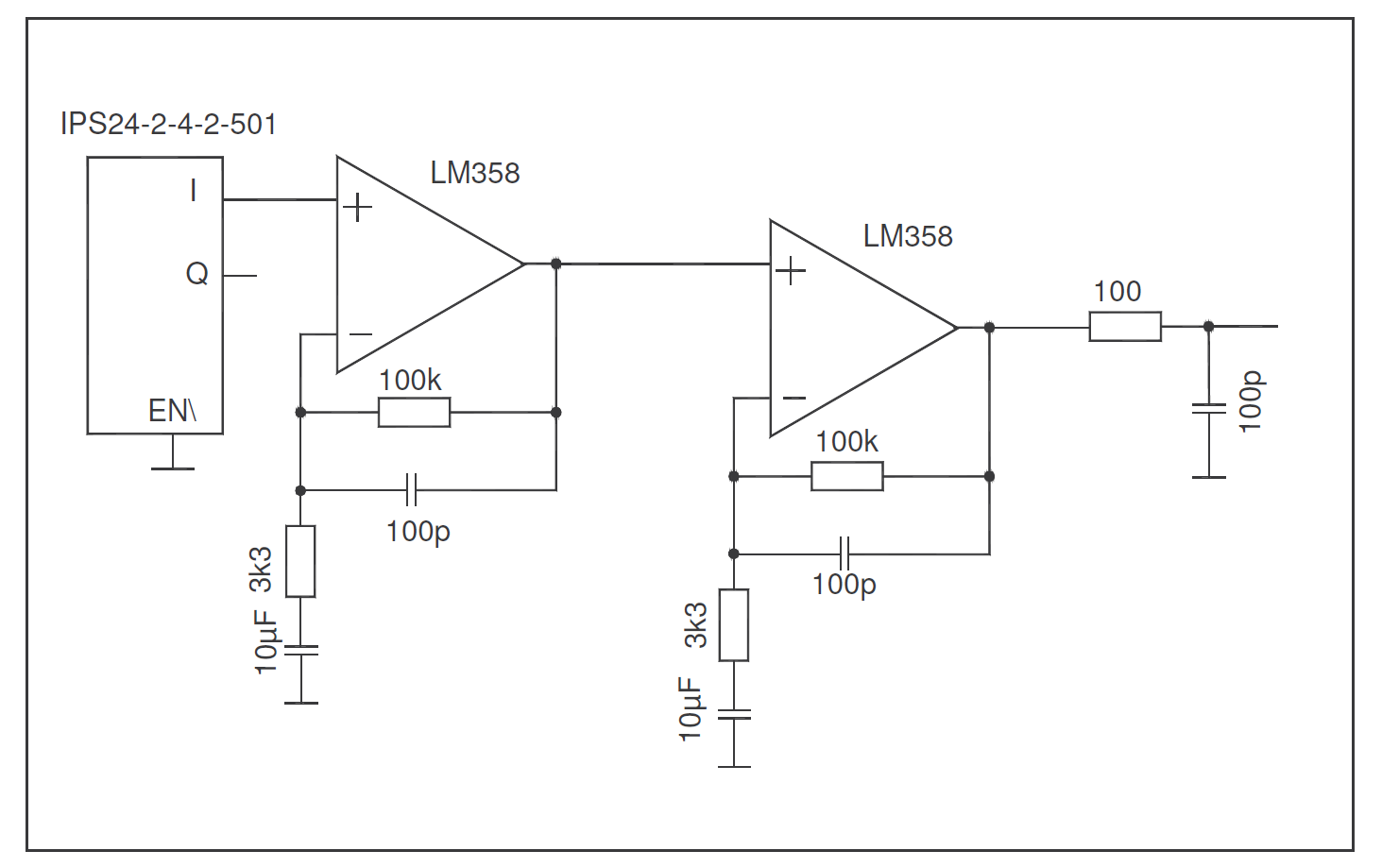
Hallo liebes Forum, ich bin leider nur "Halblaie" in Sachen Elektronik. Ich kann zwar ziemlich gut löten, kann mit dem ohmschen Gesetz was anfangen und die gängigen Bauteile und deren Funktion kenne ich auch und hab auch mal Spulen, Kondensatoren und weiß der Geier was sonst noch berechnen können. Doch die Zeiten wo man beim CVJM noch selber die Frequenzweichen für die Selbstbaubox incl. Leiterplatten gebastelt hat sind schon 30 Jahre her. Und so muß ich sagen: mein nächstes Projekt übersteigt meine Grenzen doch etwas...zumindest teilweise, weil ich mich mit ICs und Logik nie so wirklich angefreundet habe. Ich hoffe daher auf Hilfestellung...vielleicht ist es ja doch nicht so kompliziert wie es für mich auf den ersten Blick aussieht. Ich versuche so weit wie möglich auf fertige Module zurückzugreifen, aber beim Radar-Bewegungsmelder wird das leider nix. Also... Problem: ein Spechtpaar hat sich in den Kopf gesetzt meine wärmegedämmte Fassade als Nestbauort auszusuchen und schon 3 Löcher reingehackt. Das ist nicht nur schlecht fürs Haus, sondern auch schwer zu beseitigen und schaut gruselig aus. Absolut endgültige Lösungen (Netz vor die Fassade spannen, ca. 600€ mit Hubsteiger und Material) scheiden aus Kostengründen, oder aus rechtlichen Gründen (Abschuß illegal) aus. Nachdem ich mit einem Spechtexperten telefoniert habe ist mir klar geworden, dass auch optische Vergrämung ausscheidet, denn der ansonsten ziemlich dämliche Specht kann sehr wohl erkennen ob eine Greifvogelattrappe nur doof rumsitzt oder eben doch irgendwann mal einen Angriff startet. Selbst die beweglichen Greifvogelattrappen erzeugen irgendwann einen Gewöhnungseffekt. Visuelle Vergrämung scheidet also auch aus. Es bleibt nur die akustische Vergrämung. Hier kann der Vogel die Gefahr stets hören, aber niemals sehen. Werden (aus Vogelsicht) logische Tonabfolgen ausgestrahlt, erzeugt dass immer einen Fluchtreflex ohne Gewöhnunggefahr. Also z.B. Angriffsruf eines Habichts, gefolgt vom Warnruf eines Spechts, gefolgt vom Angstruf eines Spechts. Die mp3-Sounds dazu gibts glücklicherweise im WWW und es sieht so aus, als wäre es die günstigste Variante. Also muß nur ein Modul her, dass die MP3-Sounds abspielen kann. Prima, gibts schon, siehe hier: http://www.elv.de/mp3-sound-modul-msm-2-fertiggeraet.html Dazu ein schönes Netzteil, z.B. http://www.elv.de/sps-netzteil-modul-5-v-sps05m-komplettbausatz.html. Passende Lautsprecher, ein schönes Gehäuse...alles könnte so schön sein...wenn da die Sache mit dem Bewegungsmelder nicht wäre. IR scheidet aus, weil zu unempfindlich. Also Radar-Bewegungsmelder. Um die Anzahl der Fehlauslösungen zu minimieren sollte dieser in der Lage sein zwischen Hin-/Fortbewegung zu unterscheiden und nur bei Zielen die sich auf den Melder zubewegen einen Schaltimpuls erzeugen. Passendes Modul gibt es z.B. das RSM2650 von B+B (siehe PDF-Datenblatt). Allerdings muß ich dort die beiden Signale S1 und S2 um 70-80db verstärken und dazu müßte ich sowas wie im Schaltplan angedachtes mit LM358 oder ähnlich bauen. Und wie werte ich dann die verstärkten Signale von S1 und S2 am einfachsten aus, damit am Ende bei anfliegenden Zielen schlichtweg ein Relais anziehen kann und den Kontakt am MP-Soundmodul schließt und die Tonabfolge gespielt wird. Frage also: - ist das was da im Schaltplan zu sehen ist, ausreichend um jeweils S1/S2 zu verstärken oder gibt es gar was Besseres und vielleicht schon als Modul fertig konzipiertes? - wie erfolgt die Auswertung der I/Q-Signale S1/S2. Da habe ich überhaupt keine richtige Idee. Fensterdiskiminator? Phasendiskriminator? Ich danke schon mal für die Hilfe!
Angehängte Dateien:
-

OPVLM358.png
54 KB
Für den Anfang ist Doppler-radar schon eine recht kompliziertes Thema für den Einstieg. Im Prinzip passt das mit der Verstärkung so etwa - die Kondensatorwerte ggf. noch etwas anpassen. Beim Eingang braucht es ggf. noch einen definierten Gleichspannungspegel, da ist die Anleitung nicht so detailiert. Der LM358 ist ggf. nicht so optimal, aber die OPs sind relativ leicht austauschbar. Wenn man die Richtung mit erfassen will braucht man die Verstärkung 2 mal. Ich hätte da mehr so Richtung MCP6002/4 tentiert. Die Frage ist dann noch was dahinter folgen soll. Die vornehme Variante, um auch die Richtung zu erkennen, wäre das ganze zu digitalisieren und im µC etwa per complexer FFT auszuwerten. Das ist aber schon ein etwas komplizierteres Programm. Die Bewegung sieht man dann als Amplituden bei positiver bzw. "negativer" Frequenz. Die rein analoge Auswertung auch mit Richtung ist möglich aber auch nicht gerade einfach. Das würde dann etwa so aussehen, den einen Kanal in der Phase zu verschiebt und dann die beiden Signale zu multipliziert und dann noch einmal filtert. Je nach Richtung gibt es dann einen positiven oder negativen Puls. Einfacher wäre es wenn man die Richtung nicht braucht, da reicht so etwas wie Gleichrichtung, Glättung und ein Schaltschwelle. Auch das geht ggf. per µC.
Ok, das mußte ich erst mal verdauen...bin leicht überfordert, daher schrittweise, ich will es ja schließlich verstehen: - warum MCP6002/4 statt LM358? - warum ist der LM358 nicht ganz so optimal? - reichen zwei LM358 hintereinander um die 70-80dB zu erreichen? - warum Kondensatorwerte anpassen? bezgl. Auswertung: - ginge es auch mit zwei Schmitt-Triggern (CD40106) für I/Q und danach dann zwei CD4013. Das erste FlipFlop der vom CD40106 getriggert wird setzt das zweite zurück und damit habe ich eine Aussage welches Signal zuerst da war und dann weiß ich ja ob Annähernd oder Entfernend. Ich hab nur noch keine Idee wie es danach weitergeht und wie man dass dann konkret mit Rs beschalten müßte.
Ulrich H. schrieb: > Für den Anfang ist Doppler-radar schon eine recht kompliziertes Thema > für den Einstieg. Ich habe mich vor einiger Zeit auch mal mit leider ebenfalls geringen Grundkenntnissen an das Thema gesetzt. Im Prinzip hat die schaltungstechnische Auswertung zum Glück nichts mehr mit Radar zu tun. Es geht einfach um 2 Ausgänge, die jeweils ein Sinussignal geringer Frequenz liefern. Laut dem Datenblatt oben 20-900 Hz. Die Amplitude des Signals hängt von der Größe des bewegten Objekts ab. Die Phasenverschiebung der beiden Signale zueinander hängt, da bin ich jetzt schon im Halbwissen, von der Geschwindigkeit des Objekts relativ zum Sensor ab. Die Frequenz der Signale, hm, gute Frage. Glaub auch einfach direkt von der Geschwindigkeit abhängig, aber ohne Erkennungsmöglichkeit ob Annäherung oder Entfernung. Auf einer Messe (nächste Woche ist wieder die Electronica in München) habe ich mal einen Versuchsaufbau mit so einem Sensor und seinen beiden Ausgangskanälen an Oszilloskop gesehen. Da konnte ich mein theoretisches Wissen überprüfen. Finger annähern gibt eine kleine Amplitude, die Hand eine große. Die Sache mit der Frequenz und Geschwindigkeit war ebenfalls erkennbar, nur die Amplitudenverschiebung konnte ich vom bloßen Hinschauen nicht ermitteln. Also man muß nur drei Dinge mit dem µC auswerten: -Frequenz -Amplitude -Phasenverschiebung Theoretisch bestimmt total einfache Sachen, die so ein Mikrocontroller mit links macht. Ich würde mich freuen, wenn jemand da Tipps hat. Eigentlich würde ich denken, daß bei all den Basteleien doch schonmal jemand fertige Programme für diese Anwendung geschrieben hat bzw. es irgendwo Bastelprojekte dazu gibt. Ich hatte, glaub vor etwa einem Jahr, aber bei umfangreicher Suche nichts dazu gefunden. Meine Problemstellung ist ähnlich wie die von Andrea, nur andersherum: Ich möchte vor einem Tor erkennen, ob sich ein kleiner PKW oder ein großer LKW nähert. Es gibt solche Bewegungsmelder fertig, für ein paar 100 Euro. Die sehen innen genauso aus wie die von Automatiktüren, nur der PIC drin ist anders Programmiert. Ich habe so einen älteren Bewegungsmelder mal zerlegt. Der hat noch keine Flachantenne, sondern so ein Horn mit verstellbaren Flanken. Die ganze HF-Elektronik ist drangeklebt und auf die Auswerteplatine gehen wie bei dem aktuellen Sensor oben nur 4, 5 Leitungen. Die zwei Niederfrequenzsignale verschwinden direkt in einem PIC. Weiß nicht mehr was für ein Typ es genau war, aber die Signale gingen auf Analogeingänge. Und diese Tür konnte Richtungserkennung und Empfindlichkeit per DIP-Schalter. Also die programmtechnische Auswertung muß ziemlich simpel sein, wenn man weiß, wies geht.
Oh, schon wieder fast 2 Jahre vorbei. Mittlerweile gab es ein ähnliches Projekt in der Make 2/2016. (Bezahllink zum Artikelmit kleiner Vorschau): https://shop.heise.de/katalog/experimente-mit-mikrowellen ) Dort wurde ein 10 GHz-Modul mit einem Ausgang über 2xLM358 verstärkt an den Arduino gehängt, Frequenzmessungs-Libray und umrechnen auf km/h. Hat vielleicht jemand in der Zwischenzeit mit so einem Zwei-Ausgangmodul herumgebastelt?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.