Moin,
ich möchte mit meinem Atmega 8515 zwei unterschiedliche PWM Signale
erzeugen deren Duty-cycle sich alle 5 sec. auf einen (mehr oder weniger)
zufälligen Wert ändert. Leider bekomme ich zwei Signale mit einem
konstanten Duty-cycle heraus. Ich hoffe jmd findet meinen Fehler im
Quellcode.
Anonym schrieb:> ich möchte mit meinem Atmega 8515 zwei unterschiedliche PWM Signale> erzeugen deren Duty-cycle sich alle 5 sec. auf einen (mehr oder weniger)> zufälligen Wert ändert. Leider bekomme ich zwei Signale mit einem> konstanten Duty-cycle heraus.
Möchtest Du "zufällige duty cycle Werte" oder "zufällige
Helligkeitswerte" steuern?
Falls es um Helligkeit geht, wäre zu beachten, dass die Helligkeit NICHT
linear mit dem duty cycle steigt:
http://www.mikrocontroller.net/articles/LED-Fading
Anonym schrieb:> TIMSK = (1<<OCIE1A)|(1<<OCIE1B)|(1<<TOIE1);
Du gibst zwar alle Interrupts des Timers frei, diese werden aber in dem
sichtbaren Teil deines Programmes gar nicht behandelt. Vermutlich wird
also der MC bei jedem Versuch, eine ISR anzuspringen, bei Reset wieder
neu anfangen.
Für so etwas braucht man auch gar keine Interrupts. Du schreibst
lediglich in OC1A und OC1B werte, den Rest macht der MC alleine. Auch
der Overflow Interrupt ist unnötig.
Ich habe die Zeile mal auskommentiert und siehe da der Duty cycle ist
zufällig.
>> TIMSK = (1<<OCIE1A)|(1<<OCIE1B)|(1<<TOIE1);
Allerdings bleibt dieser nicht wie erwünscht über 5 sec konstant. Hat
die "delay" funktion eine zeitliche Beschränkung
Anonym schrieb:> Allerdings bleibt dieser nicht wie erwünscht über 5 sec konstant. Hat> die "delay" funktion eine zeitliche Beschränkung
Nicht im Bereich 5 Sekunden. Ok, auf die Mykrosekunde wird die
Verzögerung nicht stimmen, aber ich glaube, darum gehts dir nicht.
Da wird halt das
Anonym schrieb:> Du hast recht, mir kommt es nicht auf die millisekunde an. Aber das> auskommentieren von> #define F_CPU 1000000UL> bringt auch keinen Erfolg
Es geht nicht ums auskommentieren.
Es geht darum, dass die 1 Million, die du da hinschreibst mit der realen
Taktfrequenz des µC übereinstimmen muss!
Die Angabe bei F_CPU ist die Information an den Compiler wie schnell der
µC tatsächlich läuft und nicht die Vorgabe wie schnell du den µC gerne
laufen hättest.
Karl Heinz schrieb:> Die Angabe bei F_CPU ist die Information an den Compiler wie schnell der> µC tatsächlich läuft und nicht die Vorgabe wie schnell du den µC gerne> laufen hättest.
Beispiel:
Schreibst du da
1
#define F_CPU 1000000UL
dann berechnet der Compiler die Anzahl an Umdrehungen, die der µC beim
Däumchen drehen für
1
_delay_ms(5000);
machen muss für diese Taktfrequenz von 1Mhz, da er ja durch die 1Mhz
weiß, wie lange der µC für einmal Däumchen drehen braucht.
Ist der µC aber tatsächlich 4 mal schneller, weil er mit 4Mhz getaktet
wird und nicht mit 1Mhz, dann stimmt die errechnete Zahl an notwendigen
Umdrehungen natürlich nicht. Der µC muss jetzt wesentlich mehr
Umdrehungen des Daumens machen (4 mal so viele), damit das wieder 5
Sekunden dauert.
D.h. wenn ich den Takt zu niedrig angebe braucht er weniger als 5 sec,
wenn ich ihn zu groß angebe braucht er mehr als 5sec? Ich habe
verschiedene Takte durchprobiert und es tritt nicht die geringste
Zeitverzögerung ein.
Anonym schrieb:> D.h. wenn ich den Takt zu niedrig angebe braucht er weniger als 5 sec,> wenn ich ihn zu groß angebe braucht er mehr als 5sec? Ich habe> verschiedene Takte durchprobiert und es tritt nicht die geringste> Zeitverzögerung ein.
Dann zeig dein Programm, so wie es jetzt ist.
Das klingt dann stark danach, als ob du immer noch Resets im Programm
hast, was auf einen weiteren Fehler hindeutet.
ALternativ probiere mal folgendes
1
#include<avr/io.h>
2
#include<stdlib.h>
3
#include<util/delay.h>
4
5
#define F_CPU 1000000UL
6
7
intmain(void)
8
{
9
DDRD=(1<<PD5);
10
11
while(1)
12
{
13
PORTD|=(1<<PD5);
14
_delay_ms(1000);
15
16
PORTD&=~(1<<PD5);
17
_delay_ms(1000);
18
}
19
}
an PD5 hast du offenbar irgendeine Möglichkeit was zu messen (eine
LED?). Der Ausgang muss 1 Sekunde High und 1 Sekunde Low sein.
WEnn er das ist, dann ist die Taktfrequenz des µC tatsächlich 1Mhz. Wenn
nicht, dann musst du eben rausfinden, wie schnell der µC wirklich
taktet. Hast du einen QUarz drann, dann wird der wohl aktiv sein und es
gilt die Quarzfrequenz. Hast du .... das kann ich aber von hier aus
nicht sehen.
keine Verzögerung zu sehen.
Dein anderer Tipp hat mich bislang auch nicht weitergebracht. Habe 1,
8,16 und 3,68 MHz probiert und die LED blinkt zu schnell
Anonym schrieb:> Dein anderer Tipp hat mich bislang auch nicht weitergebracht. Habe 1,> 8,16 und 3,68 MHz probiert und die LED blinkt zu schnell
Das stinkt für mich danach als ob dein µC Resets macht.
Was ist dann an den Pins angeschlossen?
LED?
Hoffentlich mit Vorwiderstand.
Anonym schrieb:> #include <util/delay.h>> #define F_CPU 16000000UL
Ist da nicht die Reihenfolge falsch? Ich definiere meine F_CPU über AVR
Studio, aber ich kann mich erinnern, das man delay.h erst einbinden
sollte, nachdem F_CPU definiert ist, damit delay.h eine Chance hat, sich
zu justieren.
Anonym schrieb:> Kann ich dir nicht sagen, ich benutze das STK500 zum programmieren
Das hat damit nichts zu tun, die Optimierung wird in den
Compileroptionen eingestellt, der Programmer kregt nur noch das Ergebnis
zu sehen. Ein guter Anhaltspunkt ist die Grösse des Codes, falls dir das
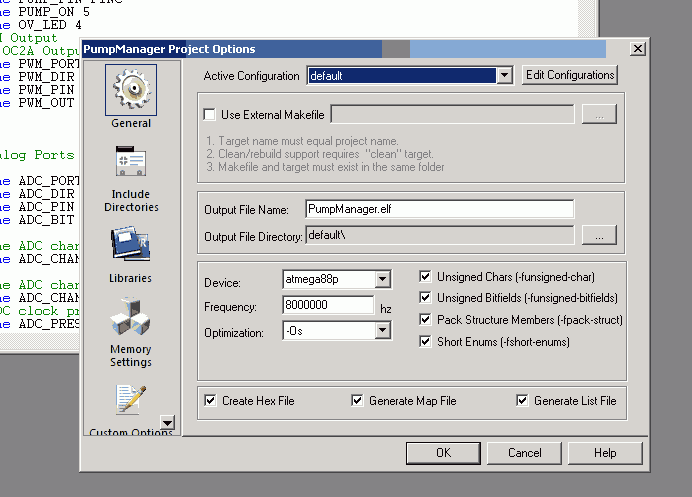
nach dem Kompilieren angezeigt wird.
Hier mal ein Screenshot vom AVR Studio 4