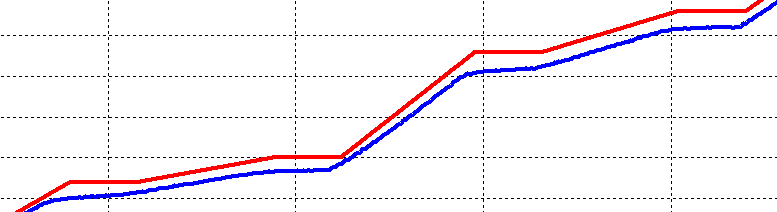
Hallo liebe Leute! Ich habe eine kleine Frage und hoffe ihr könnt mir hierbei weiterhelfen. Im Bild sind zwei Kurven ersichtlich, die Sollkurve (ROT) und die Istkurve (BLAU). Es handelt sich hier um eine Messung von einem Ofen. Dabei wird aufgeheizt, dann die Temperatur gehalten. Wieder aufgeheizt und wieder die Temperatur gehalten. Es ist ein PID verbaut. Meine Frage nun, welche Anteile müssen verändert/verbessert werden, um die Regelung besser zu gestalten. Meine Meinung dazu: P-Anteil und I-Anteil erhöhen. Was der D Anteil hier zu suchen hat weiss ich nicht, da ich nur Laienwissen in der Regelungstechnik besitze. Ich freue mich über jede Hilfestellung LG Dave
Angehängte Dateien:
-

Ofentemperatur.png
1,9 KB
try 'nd error? P-Anteil leicht runter, D-Anteil erhöhen, I-Anteil leicht erhöhen.
Der I-Anteil kompensiert den statischen Regelfehler des P-Reglers, da man dessen Verstärkung nicht auf +oo stellen kann. Viel I-Anteil macht den Regler träge und langsam, da jede Abweichung über die Zeit integriert, also aufsummiert wird. Bei sich rasch ändernder Istgröße kann das zum Problem werden. Beispiel: Ofentür wird während des Aufheizens geöffnet => Differenz Soll-Ist wird größer, mehr Heizleistungszufuhr => Ofen wieder zu => Überschwinger, da der Integrator immer noch die Soll-Ist-Differenz bei geöffneter Klappe "gespeichert" hat. D-Anteil macht den Regler "schneller", da versucht wird, über die Steigung des Fehlersignals eine Prognose der Soll-Ist-Differenz in naher Zukunft zu treffen. Damit kann aber z.B. auch die thermische Kapazität bzw. auch Ankopplung des Heizelements teilweise kompensiert werden. Viel D-Anteil macht den Regler "nervös"; einfach mal für diesen Fall das Ofen-auf-Beispiel durchdenken.
sieht so aus, als ob deine IST Kurve nach links verschoben wurde. Nicht kausales Verhalten, es sei denn du hast magische Kugel im System :) Ich tippe eher auf Zeitstempelfehler. Geht es dir darum bleibende Abweichung wegzubekommen oder Regelung schneller zu machen? Ich tippe auf das erste und empfehle I-Anteil zu erhöhen.
Kachelofen schrieb:
Die Kurve zeigt eine dauerhafte Abweichung -> P runter, I rauf.
Bei den Knicken der Soll-Kurve erfolgt eine stärke Änderung -> D runter
Wie du siehst ist hier jeder nur am Raten... Frag mal google wie man einen PID relativ geschickt und schnell einstellt. Die meisten mir bekannten Ansätze versuchen das System zunächst rein mit dem P-Antei zu stabilisieren. Erst im Anschluss können D- und I-Anteile eingespielt werden. Aber ohne Ausprobieren wird das nicht klappen. Ein PID-Regler ist meines Wissens ja nur eine Art handhabbare Notlösung zum idealen Regler, welcher die Kenntnis der Dynamik des echten Systems voraussetzt. Da man die aber eher selten hat, muss man eben ausprobieren. Viele viele Versuche, sauber dokumentiert, führen zum Erfolg. Und der Schlüssel ist die Dokumentation, sonst wirst du dich ganz schnell im Wald der Parameter verlaufen und verlierst die Lust! PID sind 3 Parameter-Dimensionen... Und stabil und unstabil liegen in dem Raum nicht selten ganz nahe beieinander!
Flo Norbert schrieb: > Es ist ein PID verbaut. Das Bild sieht höhstens wie ein P-Regler aus, ohne den geringste I-Anteil. Also zu erstmal ki erhöhen.
Das PDF zur Application Note AVR221 von Atmel erklärt anhand von Grafiken sehr gut die Wirkungsweise der P,I, und D Faktoren: http://www.atmel.com/Images/doc2558.pdf
Danke für die Antworten, das werde ich mal näher betrachten für die Reglerkonfiguration. Eine Frage noch: Es heisst immer, dass der D-Anteil die Regelung schneller macht, bis jetzt verstehe ich dieses Phänomen nicht. Wenn der P Anteil erhöht wird, bekommt man eine schnelle Istwertänderung, und der I Anteil gleicht dann den Fehler aus (falls vorhanden). Wozu ist nun eigentlich der D Anteil da ? Ist er dafür da um den P- und I Anteil zu unterstützen um diese noch schneller zu machen? LG Dave
Auch geraten: In den meisten Fällen lohnt der D-Anteil nicht. Der Grund hierfür ist einfach der: Die Nachteile überwiegen die Vorteile. Da es sich in Deinem Falle um einen Ofen handelt - also Sprünge in der Temperatur nicht zu erwarten sind - sind Reaktionen auf schnelle Ereignisse nicht wichtig. Auch das oben angesprochene Öffnen der Ofentür rechtfertigt keine schnelle Reaktion. Das Absinken der "Lufttemperatur" im Ofen und meist völlig neue Ausgangswerte durch das Be- oder Entladen des Ofens bedingen keine schnelle Reaktion, sondern eine neue Einstellung der Heizleistung. Probleme treten auch oft nur dadurch auf, dass der Anwender zu Gattung der Sehmänner gehört. Diese stehen unter dem ständigen Drang die Ofentür zu öffnen, um zu sehen... keine Ahnung nach was.
HW Entwickler schrieb: > sieht so aus, als ob deine IST Kurve nach links verschoben wurde. > Nicht kausales Verhalten, es sei denn du hast magische Kugel im System > :) > Ich tippe eher auf Zeitstempelfehler. Warum wird auf diesen m.M. nach berechtigten Einwand nicht eingegangen? So ist das alles doch nur Kaffesatzleserei. Fürmich sieht das auch nicht nach einem Regelungsproblem sondern eher nach einem Messfehler mit ca. constantem Offset aus. Wurden die Kontrollmessungen mit dem selben Messaufnehmer und an dem selben Ort wie der Aufnehmer für die Regelung gemacht? Sonst mal nachkalibrieren. Ansonsten zur Grundeinstellung eines Reglers als erstes mal eine Sprungantwort aufnehmen.
Max Mustermann schrieb: > Warum wird auf diesen m.M. nach berechtigten Einwand nicht eingegangen? > So ist das alles doch nur Kaffesatzleserei. Wenn Du das Forum länger beobachtest, wirst Du feststellen, dass beigestellter (wenn überhaubt was beigestellt ist) Sourcecode, Daten, Zeichnungen oder was auch immmer, meist so rauskopiert, neu abgetippt (mit neuen Fehlern) oder sonstwie verstümmelt sind, dass eine Fehlersuche zu meheren Interpretationen führen wird. Hier ein aktuelles und besonders schönes Beispiel: Beitrag "STM32F4 Flash wird dauernd beschrieben"
Flo Norbert schrieb: > Meine Meinung dazu: P-Anteil und I-Anteil erhöhen. Was der D Anteil hier > zu suchen hat weiss ich nicht, da ich nur Laienwissen in der > Regelungstechnik besitze. Die Einstellmethode von PID-Reglern nach "Ziegler-Nicols" soll zwar "altmodisch" sein, führt aber zumeist zum Erfolg. siehe auch:http://de.wikipedia.org/wiki/Faustformelverfahren_%28Automatisierungstechnik%29
Also das Thermoelement für den Ofen sitzt oben im Eck, der quasi die Temperaturrampen im Ofen regeln soll. Unser Thermoelement haben wir am Boden mittig platziert der am Datenlogger hängt. Es handelt sich um einen Kammerofen, die Größe der Heizkammer ist mit dem Innenraum einer Mikrowelle vergleichbar. Zusätzlich ist dieser Ofen mit einer integrierten Luftumwälzung für eine angeblich optimale Wärmeverteilung ausgestattet. hmm :/
Die beiden Kurven haben drei sehr markante Knicke. Verschieb die Kurven, damit die Knicke direkt den gleichen Zeitpunkt treffen. Für mich sieht das nach einem PD Regler aus.
Interessant waere auch eine Beschriftung der Kurven. In welcher Groessenordnung bewegt sich die Abweichung? Wenn das Zehntelgrad sind - vergiss die Abweichung. Wenn das 10 Grad sind - ok du hast moeglicherweise Handlungsbedarf. Moeglicherweise deshalb, weil eine absolut gleichmaessige Temperaturverteilung in einem bestimmten hinreichend grossen Volumen ein Mythos ist. Bist du sicher, dass du die Kurven nicht verwechselst. Ist seltsam wenn die Isttemperatur schon in einen ansteigenden Ast geht, noch bevor die Solltemperatur eine hoehere Vorgabe macht.
Das die blaue Kurve schon vor der roten (Sollwerte) reagiert, sieht verdächtig aus. Wenn das ein Programmregler ist, wäre das eventuell möglich, wenn der die zukünfigen geplanten Änderungen schon aus Ausnutzt. Das wäre dann aber mehr als ein PID Regler. Wegen der Abweichung sieht es danach aus, das der I Anteil fehlt oder viel zu klein ist. Bei einem 2. Sensor für die Messung kann das aber auch einfach die Abweichung der Sensoren sein. Der D- Anteil ist ein Versuch den gemessenen Wert ein wenig in die Zukunft zu extrapolieren und damit ein Überschwingen zu verringern. Man benötigt den D Anteil ggf. wenn der Regler sehr schnell im Vergleich zum System werden soll. Die Einstellung des D Anteils ist aber nicht ganz einfach, zumal ein realer Regler keinen wirklichen D Anteil haben kann, sondern immer nur ein Bandbreitenbegrenzte Näherung davon. Man hat damit ggf. 2 Parameter für den D Anteil (den eigentlichen Faktor und dazu die Dämpfung bzw. Filterung). Da sich die Umsetzungen in dem Punkt unterscheiden passen auch die üblichen Einstellregeln nicht unbedingt immer. Die Kurve sieht nach einer eher langsamer, konservativen Einstellung des Reglers aus. Man könnte also vermutlich den P und I Anteil noch vergrößern oder den D Anteil etwas verkleinern. So wirklich viel kann man aus der Kurve aber auch nicht ablesen, vor allem wenn der Ist-wert von einem anderen Sensor kommt als der für die Regelung genutzt wird.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.