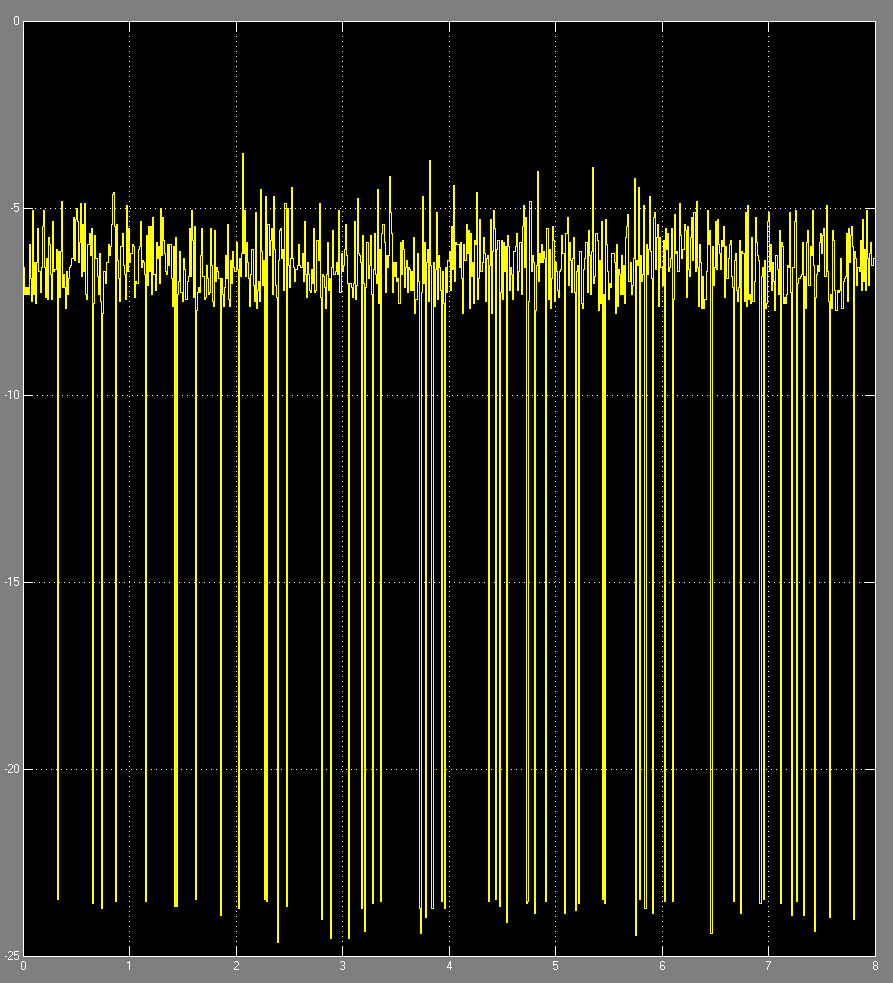
Hallo, arbeite gerade an der Auswertung für einen MPU 6050. Dabei lese ich den Gyro einer Achse aus und rechne die Werte in °/s um. Dabei erhalte ich starkes Rauschen (siehe Bild) ist das normal oder mache ich was falsch? PS: Mir ist klar das ein gewisses Maß an Rauschen normal ist aber ein Bereich von bis zu 30°/s ? Danke
Angehängte Dateien:
-

RauschenGyroY.PNG
5,3 KB
Solche Peaks konnte ich bei meiner MPU6050 noch nicht beobachten. Wenn ich das richtig in Erinnerung habe war das Gyrorauschen so +-2°/s (je nach Sensivität, Achse & Temperatur). Gruß
Angehängte Dateien:
-

RauschenGyroY.PNG
4 KB
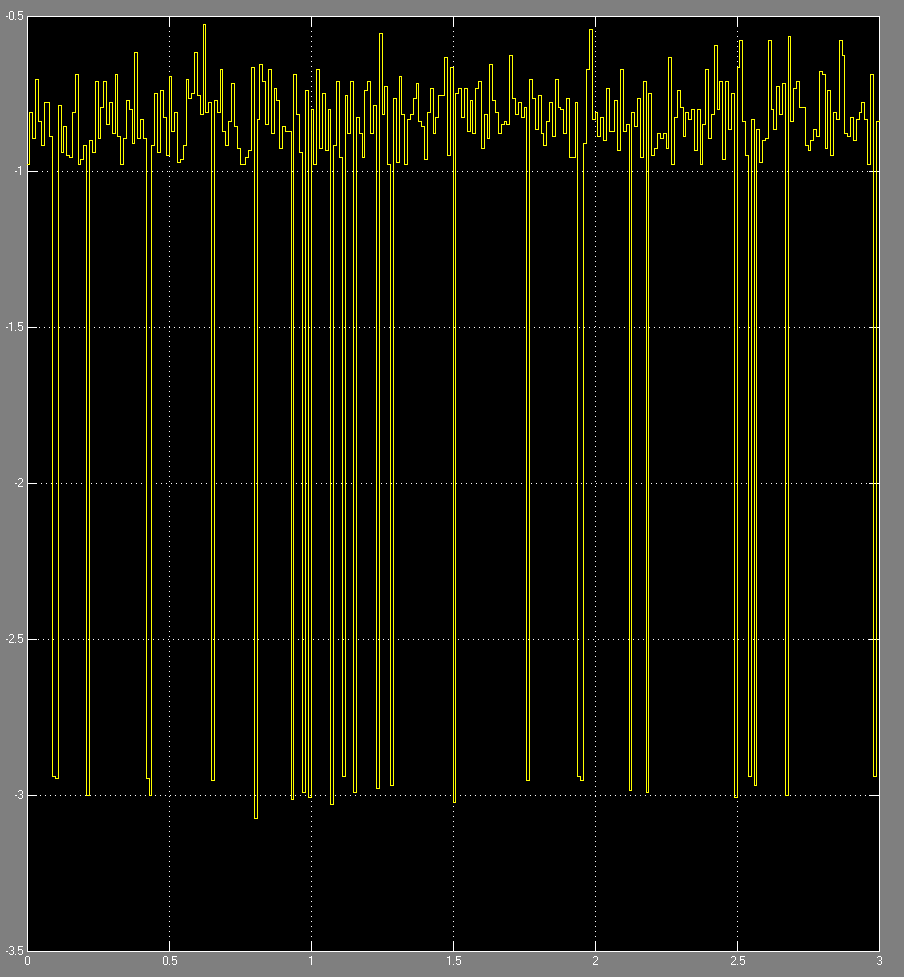
Ok Danke, habe gerade gesehen meine Umrechnung stimmt nicht. Jetzt schwankt der Wert um ca. 3,5°/s, die Peaks habe ich aber trotzdem noch. Kann das sein?
Ich hab mit dem Sensor teils Messreihen mit über 18 Millionen Werten aufgezeichnet... da hats definitiv was. Auch 3,5°/s sind weit über dem weißen Rauschen.
Sind die Ausreisser auch in den nicht umgerechneten Daten? Mach davon mal einen Plot.
jemand anders schrieb: > Sind die Ausreisser auch in den nicht umgerechneten Daten? Mach > davon mal einen Plot. Ja die Ausreißer sind auch in den Rohdaten.
Dunstknilch schrieb: > Duerfen wir mal einen Blick auf Schema und Layout werfen ? Was möchtest du genau sehen? Ich sende die Rohdaten per Rs232 an den PC, rechne in Simulink um und plotte die Daten.
Troll schrieb: > Die Daten müssen durch ein dickes Filter mit Ordnung 100 dann passt > alles!! Den Kopf in den Sand zu stecken, beseitigt zwar die Peaks in den Daten, aber nicht die Ursache. Sebi schrieb: > Dabei erhalte ich starkes Rauschen (siehe Bild) ist das normal oder > mache ich was falsch? Woher soll hier einer ahnen, was du genau machst? Das Datenblatt spricht von 0.05°/s RMS-Noise. Treten die Spikes in allen Messbereichen und bei allen Ausgabedatenraten in gleicher Weise auf? Sind die Versorgungsspannungen ordentlich geblockt?
Solche Ausreisser würde ich nicht als Rauschen bezeichnen, da geht wohl etwas schief, vielleicht ja schon bei der Übertragung der Daten vom Sensor zum Controller. Mit welcher Geschwindigkeit wird der I²C Bus betrieben? Sind die Pull-Ups vorhanden, und zu der Übertragungsgeschwindigkeit passend? Hängen da noch andere Bausteine am selben Bus, ist da veilleicht die kapazitive Last zu groß? Mit freundlichem Gruß - Martin
Martin Schlüter schrieb: > Solche Ausreisser würde ich nicht als Rauschen bezeichnen, da geht wohl > etwas schief, vielleicht ja schon bei der Übertragung der Daten vom > Sensor zum Controller. Hatte ich auch bei einem MPU 6050. Ein anderer Chip hatte die Macken nicht. Beschädigung durch z.B. fallenlassen der Platine?
Mach ich vielleicht beim Auslesen der Rohdaten etwas falsch. Ich lese die Hi und Lo Register einfach nacheinander aus und setzte sie zusammen. Muss ich hierbei irgendetwas beachten? Reihenfolge? Zeitabstand? ...
Ich hatte beim ersten Test das gleiche beobachtet. Dann einen zweiten und dritten MPU6050 eingebaut und Mittelwerte und Standardabweichung verglichen. Alle waren im Prinzip gleich "schlecht". Fit einer eigenen einfachen Filtersoftware war das Ergebnis deutlich besser. Dann habe ich den internen Filter eingeschaltet (ca. 10Hz) und die Ergebnisse waren ok. Meine Anwendung, ein Segway-Clone, läuft damit problemlos. www.ups.bplaced.de W.
Selbes Phänomen ist uns vor einiger Zeit auch aufgefallen, da war nur die z Achse betroffen. Höhere Abtastraten haben das Problem verschlechtert. 10 Hz filter oder n dicker Filter hinterher kann ja nicht die Lösung sein. Wir haben leider keine echte Lösung gefunden damals, probierten alle möglichen configs damals durch. Allerdings hat ein median Filter das damals gut kaschiert. Bin sehr gespannt, ob du es lösen kannst oder ob wirklich ein HW defekt besteht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.