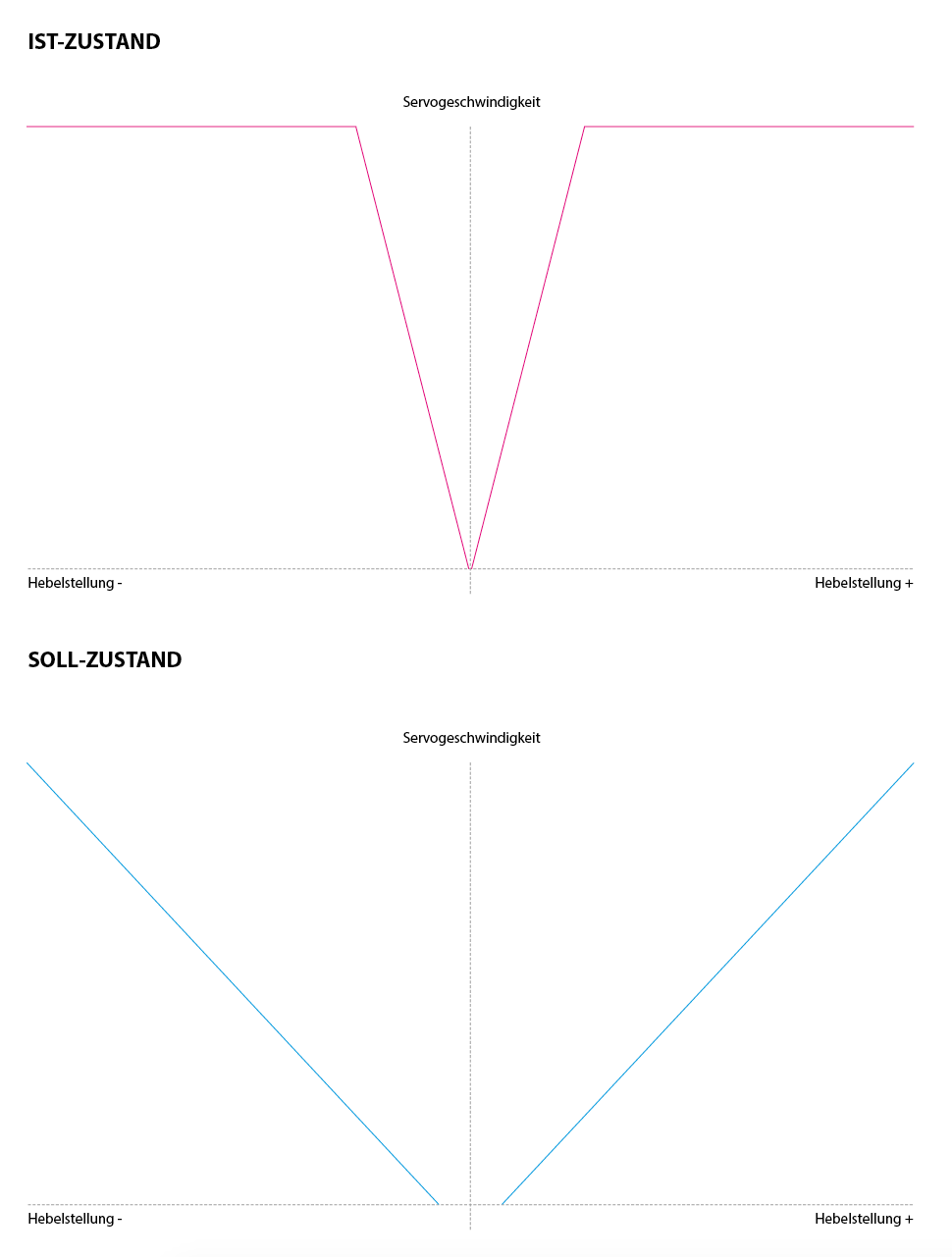
Hallo Leute, ich hoffe, dass ich das hier im richtigen Forum poste. Ich habe ein Problem und ich bin mir sicher ihr könnt mir helfen. Kurz vorab: Ich frage, daher bin ich kein Experte somit verzeiht mir wenn manche Dinge die ich schreibe keinen Sinn ergeben. Ich habe eine RC Fernsteuerung die ein Servo steuert. Das Servo habe ich bearbeitet, damit es sich ohne Anschlag vollständig drehen kann (für mein Projekt wichtig). Mein Problem: Drücke ich den Hebel an der Fernsteuerung nur ca. 25% des Hebelwegs, läuft das Servo schon auf maximaler Geschwindigkeit. Alles zwischen 0% und 25% Hebelweg verlangsamt das Servo - so wie es sein soll. Nun möchte ich aber, dass das Servo seine Maximalgeschwindigkeit erst bei 80% - 100% erreicht. Ich also mehr "Weg" habe um die Geschwindigkeit zu regulieren. Anbei eine Skizze davon. Die Frage ist nun: Wie könnte eine Lösung aussehen? Es ist ein digitales Servo (Modelcraft RS-22 YMB). Die Fernsteuerung hat keine Möglichkeiten eine entsprechende Einstellung dazu vorzunehmen. Für die Lösung könnte ich am Servo sowie an der Fernsteuerung arbeiten. Mein Ansatz: Das Poti in der Fernsteuerung welches für das Servo zuständig ist anzupassen. Sprich mit Widerständen o.ä. dafür sorgen, dass bei voll betätigtem Hebel nur ein halb / viertel betätigter Hebel "vorgespielt" wird. Wie könnte man so etwas anstellen? Nun hoffe ich, dass ihr mir helfen könnt und, dass der Post hier nicht völlig an falscher Stelle entstanden ist :-) Falls doch bitte ich euch mir zu verzeihen. Vielen Dank und Grüße, Kevin
Angehängte Dateien:
-

ServoBeispiel.png
18 KB
www.electronicsplanet.ch/Roboter/Servo/hacking/overview.htm
hinz schrieb: > Servoelektronik durch Fahrtreglerelektronik ersetzen. Aber die Servoelektronik verrichtet ja eigentlich einen guten Job. Gibt es keine andere Möglichkeit? Falls nicht, werde ich damit wohl leben müssen. Kann man die Fernsteuerung nicht grob wie von mir angedacht in einer Weise modifizieren? Der Fahrtregler den ich habe steuert den Motor für einen Antrieb und wenn ich das recht verstehe müsste ich einen zweiten Fahrtregler anbinden? MaxB schrieb: > www.electronicsplanet.ch/Roboter/Servo/hacking/overview.htm Dort wird doch nur beschrieben wie ich auf ein "unendlich drehendes" Servo umbaue oder habe ich etwas überlesen? Das Servo ist ja bereits umgebaut und funktioniert auch wunderbar. Bis eben auf den Punkt, dass das Servo die gesamte Geschwindigkeit bereits bei 25% Hebelweg ausführt.
Leider schreibst du nicht, welche Fernsteuerung du hast. Füge mal einen Serienwiderstand in die Leitung vom Schleifer des Potis zum IC ein. Du kannst auch am oberen und unteren Ende vom Poti einen Widerstand einfügen um den Bereich zu verkleinern. Probier einfach mal.
Wenn der Fernsteuersender nicht nur ein Spielzeugsender ist, kannst du die Steuerkurven beeinflussen (programmierbarer Sender). Das Zauberwort heist dann "Expofunktion". Um den Knüppelmittelpunkt kann dann z.B. Sehr feinfühlig gesteuert werde, bei deinem umgebauten Servo läuft es dann halt langsamer an. http://wiki.rc-network.de/index.php/Expo Bei manchen Billigsendern gibt es eine Dual-Rate-Funktion, die kann, auf kleine Ausschläge geschaltet, das Problem zumindest mindern. Der Vorschlag von Martin funktioniert natuerlich auch, am Senderpoti. Ist halt etwas zu basteln.
Ein "normales" Servo soll ja auch möglichst schnell seine Sollposition anfahren. Wenn die Servoelektronik auch bei z.B. 50% Hebelweg den Servomotor noch langsamer ansteuern würde als bei 80% oder 90% Hebelweg, dann würde dies ja den "speed" des Servos künstlich ausbremsen. Das ist ja normalerweise nicht gewollt. Die Ursache liegt also in der Elektronik im Servo.
Wenn im Sender z.B. ein 5k Poti verbaut ist, und der aktive Bereich nur 2k sind, dann könnte man ein 2k Poti einbauen und am Ende und Anfang der Bahn jeweils 1,5k in Reihe mit dem Poti schalten. Habe ich hier für eine Kamerasteuerung gerade gebaut, da wollten wir Fokus und Blende mit Wideangle Servos fahren und am Sender auch eine gute Auflösung haben. Am besten mal mit dem Ohmmeter die Bahn des Potis ausmessen.
Stefan M. schrieb: > Wenn die Servoelektronik auch bei z.B. 50% Hebelweg den Servomotor noch > langsamer ansteuern würde als bei 80% oder 90% Hebelweg, dann würde dies > ja den "speed" des Servos künstlich ausbremsen. > Das ist ja normalerweise nicht gewollt. > > Die Ursache liegt also in der Elektronik im Servo. So ist es. Kevin Lieser schrieb: > Die Frage ist nun: Wie könnte eine Lösung aussehen? Es ist ein digitales > Servo ... Da ist also ein µC drin, muß man nur das Programm anpassen ;). Bei einem analogen könnte man am Kondensator für den Pulse-Stretcher spielen. MfG Klaus
Mani schrieb: > Leider schreibst du nicht, welche Fernsteuerung du hast. > Füge mal einen Serienwiderstand in die Leitung vom Schleifer des Potis > zum IC ein. > Du kannst auch am oberen und unteren Ende vom Poti einen Widerstand > einfügen um den Bereich zu verkleinern. > > Probier einfach mal. Jawohl, werde ich. Ist eine günstige 4-Kanal Modelcraft MT-600. Bussard schrieb: > Wenn der Fernsteuersender nicht nur ein Spielzeugsender ist, kannst du > die Steuerkurven beeinflussen (programmierbarer Sender). > Das Zauberwort heist dann "Expofunktion". Um den Knüppelmittelpunkt kann > dann z.B. Sehr feinfühlig gesteuert werde, bei deinem umgebauten Servo > läuft es dann halt langsamer an. > http://wiki.rc-network.de/index.php/Expo > > Bei manchen Billigsendern gibt es eine Dual-Rate-Funktion, die kann, auf > kleine Ausschläge geschaltet, das Problem zumindest mindern. Ist aber leider Spielzeug: Somit wie im Eingangspost beschrieben keine Einstellungsmöglichkeiten am Sender. Matthias Sch. schrieb: > Wenn im Sender z.B. ein 5k Poti verbaut ist, und der aktive Bereich nur > 2k sind, dann könnte man ein 2k Poti einbauen und am Ende und Anfang der > Bahn jeweils 1,5k in Reihe mit dem Poti schalten. Habe ich hier für eine > Kamerasteuerung gerade gebaut, da wollten wir Fokus und Blende mit > Wideangle Servos fahren und am Sender auch eine gute Auflösung haben. > > Am besten mal mit dem Ohmmeter die Bahn des Potis ausmessen. Ist ein 1.1 kOhm Poti. Poti tauschen wird sich wohl nicht so einfach gestalten - muss ja auch korrekt sitzen / passen. Zudem würde ich wahrscheinlich schauen, dass ich einen zusätzlichen Schalter in das Gehäuse einbaue um eben diese Anpassung wie von Mani beschrieben mit dem Schalter aktivieren bzw. deaktivieren kann. Klaus schrieb: > Da ist also ein µC drin, muß man nur das Programm anpassen ;). Bei einem > analogen könnte man am Kondensator für den Pulse-Stretcher spielen. Richtig, für ein analoges Servo hätte ich folgende Lösung nehmen können: http://www.seattlerobotics.org/encoder/200009/S3003C.html Danke und Grüße an alle,
Mani schrieb: > Du kannst auch am oberen und unteren Ende vom Poti einen Widerstand > einfügen um den Bereich zu verkleinern. Das hat wunderbar funktioniert. Jetzt muss ich demnächst nur mal schauen ob ich das mit einem Schalter versehe damit man es auch deaktivieren kann. Vielen Dank an alle!
Freut mich. Nimm einen Schalter 2xein, oder 2xum. Schließ damit einfach die Widerstände kurz, dann hast du den Urzustand. Gruß Mani
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.