Liebe Forum-Nutzer! Ich habe mir STEC11B Drehimpulsgeber bei reichelt.de gekauft und überlege jetzt, wie ich diesen mit dem uC auswerte. Ich habe natürlich http://www.mikrocontroller.net/articles/Drehgeber von Peter gelesen, aber immer noch kann ich nicht verstehen, wie ich weiter vorgehen soll. 1. Wo ist der Unterschied zw. single/two/four step encoder? Was bedeutet denn single/two/four step? Konnte im Netz keine ordentliche Antwort finden. 2. Der STEC11B Drehimpulsgeber hat den Rastpunkt auf dem Pegelwechsel der Spur (wie rechts) oder schon beim eingestellten Level (wie links)? Reichelt gibt an, dass es sich um EC11B handelt, mein Drehgeber hat jedoch eine vertikale Ausführung und laut dem Datenblatt gibt es kein vertikaler EC11B. 3. Fragen zum Code von Peter: 3.1 Warum kann man nicht anstatt new ^= 1; sofort new=1 schreiben? Warum wird dem new, abhängig von dem Fall, 11 oder 01 zugewiesen? 3.2 was machen die Funktionen encode_read1, 2, 4? Mit freundlichen Grüßen, Andrej
Angehängte Dateien:
Andrej S. schrieb: > 1. Wo ist der Unterschied zw. single/two/four step encoder? Damit meinte ich, wieviel Phasenwechsel einem Zählschritt entsprechen sollen. Rastende machen 2 oder 4 Phasenwechsel je Rastung. Bei nichtrastend möchte man oft jeden Phasenwechsel zählen.
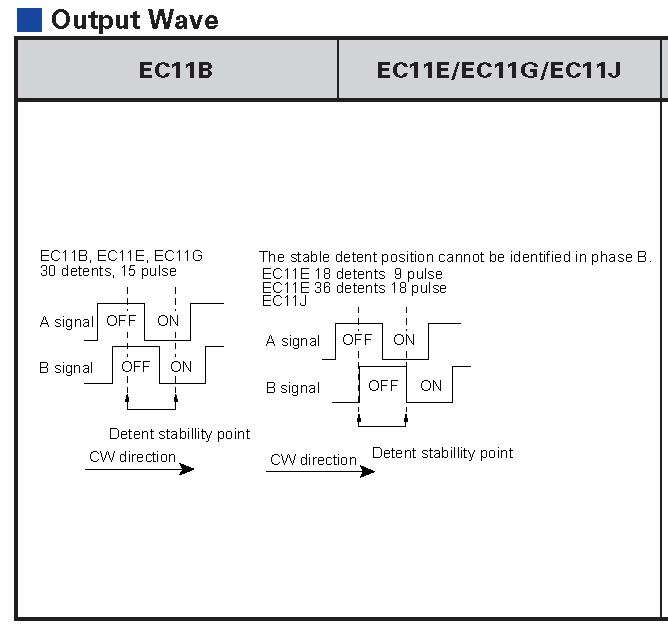
Andrej S. schrieb: > 2. Der STEC11B Drehimpulsgeber hat den Rastpunkt auf dem Pegelwechsel > der Spur (wie rechts) oder schon beim eingestellten Level (wie links)? Falls das der günstigere ist, ist der Phasenwechsel auf dem Rastpunkt. Gruß Max
Na und für welchen Typ vom Encoder ist dein Programm geeignet? Für den linken oder rechten? Für linken schwierig, denn beide Spuren (A und B) sind im Ruhezustand immer entweder an oder aus. Die Fallunterscheidung in encode_init bringt dann nichts, falls ich es richtig verstanden habe. Falls für den rechten, wie kann die encode_init 100% sicherstellen, ob der Zustand neben der Flanke high oder low ist?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.