Hallo Freunde, ich stehe vor einem Problem: Ich habe einen Beschleunigungssensor, den ich mit meinem Atmega8 via ADC verbunden habe. Anscheinend sind diese Beschleunigungssensoren nur bedingt Beschleunigungssensoren, da sie die Beschleunigung nur relativ zur Erdgravitation messen und keine eigentliche Beschleunigung an sich. Wie auch immer, mein Problem: Ich möchte, dass wenn es keine Änderung am ADC gibt (Toleranz =< 20, wegen Noise), der Wert also bspw. 500 - 520 für eine Minute (interne Uhr via Interrupts) beträgt, dass an PortB ein Output Pin aktiviert wird. Wie vergleiche ich jetzt die Werte (in C) und halte sie fest? Bitte um ernstgemeinte Hilfe Danke!
Speichere alten ADC wert, lese neuen ADC Wert => Falls gleich (oder +/- 20) => Aktion 1 Falls ungleich (oder +/- 20) => Aktion 2
Das letzte mal als ich nachgesehen hab war jede Beschleunigung relativ. Ungeachtet dessen: Du liest den ADC so oft wie sinnvoll (hängt stark von der Zielsetzung ab) ein und solange der gelesene Wert im Rahmen zählt ein Zähler hoch. Wenn der bei einer Minute angekommen ist, dann setzt du den Ausgang. Wenn der Rahmen verlassen wird, dann setzt du den Zähler zurück und schiebst den Rahmen hinterher.
Ich kann doch theoretisch auch den Referenz-ADC Wert, der keine Änderung aufzeigen soll, bei sekunde == 0 immer wieder neu setten oder?
Ja schrieb: > Ich kann doch theoretisch auch den Referenz-ADC Wert, der keine > Änderung > aufzeigen soll, bei sekunde == 0 immer wieder neu setten oder? Damit ist aber z.B. Nicht abgedeckt wenn von 0:01 bis 1:59 der gleiche Wert anliegt (und das obwohl fast 2 Minuten das gleiche anliegt).
Hallo, > Ja schrieb: > Hallo Freunde, ich stehe vor einem Problem: > Ich möchte, dass wenn es keine Änderung am ADC gibt (Toleranz =< 20, > wegen Noise), der Wert also bspw. 500 - 520 für eine Minute (interne Uhr > via Interrupts) beträgt, dass an PortB ein Output Pin aktiviert wird. > Wie vergleiche ich jetzt die Werte (in C) und halte sie fest? ich schlage eine andere Signalverarbeitung vor. Als erstes führe die rohmesswerte in ein dig. Tiefpassfunktion in der Art: MW_tp = (MW_vorgänger x (TPF-1)+ MW_akt)/TPF mit TPF = {1....n) Je höher du die Zahl für TPF wählst, desto weniger rauscht das geglättete Signal noch. TPF stellt man dann so ein, dass die Ansprechgeschwindigkeit den Anforderungen der Anwendung noch genügt. Wenn du jetzt Signalverändernungen detektieren willst, so kann man dies auch mit solchen Tiefpassfunktionen machen. Führe 2 solcher Tiefpassfunktionen, eine mit einem hohen TPF und eine zweite mit einem eher geringen TPF-Wert. Die Differenz von beiden zeigt temporäre Änderungen. Die erst Funktion mit sehr hohem TPF-Wert kompensiert Drift des Sensors. Gruß Öletronika
Max D. schrieb: > Damit ist aber z.B. Nicht abgedeckt wenn von 0:01 bis 1:59 der gleiche > Wert anliegt (und das obwohl fast 2 Minuten das gleiche anliegt). Wäre es dann vielleicht besser das bei jeden Wert, der nicht zwischen/in der Toleranz liegt als neuen Wert zu setten? U. M. schrieb: > MW_tp = (MW_vorgänger x (TPF-1)+ MW_akt)/TPF mit TPF = {1....n) Habe mich in meinem Leben niemals damit beschäftigt, das ist dann doch ein wenig zu hoch für mich (leider)..
Ja schrieb: > Habe mich in meinem Leben niemals damit beschäftigt, das ist dann doch > ein wenig zu hoch für mich (leider).. Falls du es nicht erkannt hast, das ist die normale Mittelwertbildung mit N Elementen. Ein simples Beispiel für 2 Elemente wäre:
1 | G_wert = (G_Sensor + G_wert) >> 1; |
Da wirst du mit keinem analog/digital Wandler drum herum kommen, denn keiner ist so perfekt, das er nicht um wenigstens ein Bit springt.
Okay eine Frage noch: wie löse ich diesen Konflikt code-technisch: Wenn sich Sekunde verändert (also bei jeder Änderung der Sekunde z.B von 1 auf 2. oder von 59 auf 0) dann soll ein neuer Adc Wert ausgelesen werden und gespeichert werden?
> MW_tp = (MW_vorgänger x (TPF-1)+ MW_akt)/TPF mit TPF = {1....n) Diese Formel hat den Nachteil, dass das Ergebnis nie den Eingangswert erreicht. Daher verwende ich: ADCsum += ADC - ADCsum / n mit n = 1, 2, 4, 8, 16, 32 oder 64, damit es als shr ausgeführt werden kann. Oder man schreibt es gleich so hin: ADCsum += ADC - (ADCsum >> m); //m 1..6 , Klammer notwendig! ADCsum steigt auf das n-fache von ADC an, was ein Vorteil für die Weiterverarbeitung (downscaling) sein kann. bei einem 10bit-ADC reicht für ADCsum ein U16 für n bis 64. Wenn man den Filter schnell setzen will, reicht ein ADCsum = ADC << m; > Wenn sich Sekunde verändert if (sec != secOld){ secOld = sec; storeData(); } Matthias, si tacuisses... > Falls du es nicht erkannt hast, das ist die normale > Mittelwertbildung mit N Elementen. Es ist ein PT1-Glied. Der letzte Wert hat das stärkste Gewicht.
Max D. schrieb: > Das letzte mal als ich nachgesehen hab war jede Beschleunigung relativ. Wo hast Du das gelesen, das ergibt keinen Sinn. Und die Beschleunigungssensoren die man so üblicherweise verwendet messen die absolute Beschleunigung. Und was der Threaderöffner mit Formulierungen wie "Beschleunigung nur relativ zur Erdgravitation" oder mit "nur bedingt Beschleunigungssensoren" oder "keine eigentliche Beschleunigung an sich" zum Ausdruck bringen wollte ist weitgehend rätselhaft.
Wenn du das Ding an der x-Achse umdrehst, wird, wenn der Vorgang des umdrehens abgeschlossen ist, immer noch Beschleunigung (-xg) gemessen obwohl der Sensor selbst nicht mehr bewegt (=beschleunigte) wird.
Ja schrieb: > Wenn du das Ding an der x-Achse umdrehst, wird, wenn der Vorgang des > umdrehens abgeschlossen ist, immer noch Beschleunigung (-xg) gemessen > obwohl der Sensor selbst nicht mehr bewegt (=beschleunigte) wird. Ja, das ist auch normal, er erfährt ja immer noch die Erdbeschleunigung.
Okay danke Leute, ich hab mir jetzt folgendes System überlegt: Der Adc Wert wird bei jeder Sekundenänderung abgefragt. Also wenn Sekunde sich ändert, lese ADC aus und Speicher den Wert als Variable. Wenn jetzt eine neue Sekunde anbricht, soll der ADC Wert ausgelesen werden und mit der Variable (vorheriger Wert) verglichen werden. Wenn neuer ADC mehr als +-20 abweicht, wird dieser als neuer ADC Wert gespeichert, sodass sich die Referenz sekündlich andert, wenn es so sein muss. Wenn der neue Wert nun im Rahmen liegt, so wird ein Zähler hochgezählt. Wenn dieser 60 erreicht hat, so setze Output 1. hab ich da einen logischen Fehler drin?
Und was passiert wenn der Zähler auf 30 zählt, sich der wert nun die nächsten 5 Minuten kontinuierlich ändert (Zähler zählt nicht) und anschließend wieder im Rahmen bleibt, bis der Zähler 60 erreicht hat?
Wenn der Zähler schon hochgezählt hat oder auch nicht: wenn neuer ADC als Referenz (weil nicht im Rahmen), dann Zähler = 0.
Ja schrieb: > Wenn du das Ding an der x-Achse umdrehst, wird, wenn der Vorgang des > umdrehens abgeschlossen ist, immer noch Beschleunigung (-xg) gemessen > obwohl der Sensor selbst nicht mehr bewegt (=beschleunigte) wird. Massenanziehung (Gravitation) und Beschleunigung einer Masse sind ununterscheidbar.
Udo Schmitt schrieb: > Ja schrieb: >> Wenn du das Ding an der x-Achse umdrehst, wird, wenn der Vorgang des >> umdrehens abgeschlossen ist, immer noch Beschleunigung (-xg) gemessen >> obwohl der Sensor selbst nicht mehr bewegt (=beschleunigte) wird. > > Massenanziehung (Gravitation) und Beschleunigung einer Masse sind > ununterscheidbar. Zumindest solange, solange man nicht aus dem Fenster sehen kann. Etwas was Sensoren eher selten können.
Udo Schmitt schrieb: > Ja schrieb: >> Wenn du das Ding an der x-Achse umdrehst, wird, wenn der Vorgang des >> umdrehens abgeschlossen ist, immer noch Beschleunigung (-xg) gemessen >> obwohl der Sensor selbst nicht mehr bewegt (=beschleunigte) wird. > > Massenanziehung (Gravitation) und Beschleunigung einer Masse sind > ununterscheidbar. Jedenfalls in der newtonschen Mechanik. Relativistisch schon. Auch wenn das OT ist: - Beschleunigung ist definiert durch a = dv/dt - Erdbeschleunigung ist nur im freien Fall eine Beschleunigung (dv/dt != 0) - Erdbeschleunigung beschleunigt eine Masse im freien Fall mit 9,81 m/(s^2) innerhalb der newtonschen Mechanik. Im allgemeinen relativistischen Fall nicht (daher ist es allenfalls eine Hilfsgröße mit der sich bequem Gewichtskraft einer Masse innerhalb der newtonschen Mechanik berechnen lässt).
knallbär schrieb: >> Massenanziehung (Gravitation) und Beschleunigung einer Masse sind >> ununterscheidbar. Die Aussage ist natürlich korrekt. Meine Aussage bezog sich hauptsächlich auf: Bernd K. schrieb: > Ja, das ist auch normal, er erfährt ja immer noch die Erdbeschleunigung.
Ok, ich dachte schon jetzt soll ich anfangen über schwaches und starkes Äquivalenzprinzip zu argumentieren. Ist nämlich zu lange her, da bin ich nicht mehr sattelfest :-)
Meine Frage: wie bekomme ich Tolreanz in den Code? Also der ADC Wert darf +- vom alten Referenzwert abweichen?
Ja schrieb: > Meine Frage: wie bekomme ich Tolreanz in den Code? Also der ADC Wert > darf +- vom alten Referenzwert abweichen? Ist das dein Ernst? Weißt du was Subtraktion ist? Danach kannst du deine Abweichung ja mit der von dir gewünschten Toleranz vergleichen.
Voneinander abziehen und wenn das Ergebnis im Bereich -Toleranz bis +Toleranz liegt, dann waren auch die Werte nicht weiter voneinander entfernt. (Die Verwendung der abs Funktion kann hier zb ganz hilfreich sein: Wenn der Absolutwert der Differenz kleiner als .... )
Man könnte auch sagen: Wenn der neue Wert größer als der (Referenzwert minus der Toleranz) ist UND der neue Wert kleiner als der (Referenzwert plus der Toleranz) dann .... Wie machst du das denn händisch? Bei einer Toleranz von 5, liegt 18 innerhalb oder ausserhalb der Toleranzgrenze, wenn der Referenzwert 20 ist? Wie hast du das festgestellt? Was hast du gemacht um zu deiner Aussage zu kommen? Und nein: ich hab scharf hingesehen gilt nicht! Du musst schon eine Regel angeben, die jeder ABC-Schütze, der gerade mal ein bischen rechnen kann anwenden kann. Wenn du so etwas angeben kannst, dann kannst du es auch programmieren. Wenn du es nicht angeben kannst, dann musst du dich eben selbst beobachten, wie du so ein Problem löst und davon dann die Regel ableiten. Manchmal (eigentlich ziemlich oft) hilft auch aufmalen. Hier ist eine Zahlengerade mit den relevanten Markierungen
1 | 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 |
2 | ---+---+---+---+---+---+---+---+---+---+---+---+---+---+---+--- |
3 | |
4 | ^ | ^ ^ | |
5 | | | | Referenzwert | |
6 | | | | | |
7 | | | zu untersuchender Wert | |
8 | | | | |
9 | | |///////////////////////////////////////| |
10 | | |<-------- 5 ------>|<------- 5 ------->| |
11 | | Toleranzbereich |
12 | | |
13 | zu untersuchender Wert |
warum ist 18 im Toleranzbereich und 13 nicht? Welche Beziehungen gelten?
Kann ich Betragsstriche setzen? Wenn ja wie? Ich meine, wenn der Wert vorher kleiner war als der 2., dann kommt da was negatives raus, und das kann dann außerhalb der Toleranz liegen und trotzdem akzeptiert werden von Code (600-670 =-70; -70<60, also würde Zaehler ++1 gehen, obwohl der Messwert eigentlich nicht in der Toleranz liegt..
Ja schrieb: > Kann ich Betragsstriche setzen? Nein. > Wenn ja wie? Indem du in deinem C-Buch den Vorrat an mathematischen Funktionen nachliest. Wie willst du denn programmieren, wenn du mehr als 80% deiner Programmiersprache und der Funktionen, die du zur Verfügung hast gar nicht kennst! Die Funktion heisst abs() http://www.tutorialspoint.com/c_standard_library/c_function_abs.htm
Udo Schmitt schrieb: > Massenanziehung (Gravitation) und Beschleunigung einer Masse sind > ununterscheidbar. Ja, oft gehört und gelesen. Aber: Betrachte die Vektoren zweier (geeignet) "nebeneinander" liegender Punkte. Bei der "Beschleunigung einer Masse" liegen die Vektoren parallel zueinander. Bei Gravitation zeigen sie auf einen gemeinsamen Punkt (Gravitationszentrum). Bei Zentrifugalkraft zeigen sie von einer gemeinsamen Geraden (Drehachse) weg.
Konrad S. schrieb: > Bei Zentrifugalkraft zeigen sie von einer Die Kraft gibt es nicht, das weißt du hoffentlich. Es ist mehr ein beobachtbarer Effekt. Keine Kraft. Ähnlich wie die Coreolis-"Kraft".
Yep, wollte aber nicht da auch noch Anführungszeichen setzen.
Konrad S. schrieb: > Udo Schmitt schrieb: >> Massenanziehung (Gravitation) und Beschleunigung einer Masse sind >> ununterscheidbar. > > Ja, oft gehört und gelesen. Aber: > > Betrachte die Vektoren zweier (geeignet) "nebeneinander" liegender > Punkte. Bei der "Beschleunigung einer Masse" liegen die Vektoren > parallel zueinander. Bei Gravitation zeigen sie auf einen gemeinsamen > Punkt (Gravitationszentrum). Bei Zentrifugalkraft zeigen sie von einer > gemeinsamen Geraden (Drehachse) weg. Der springende Punkt ist aber, dass ein Beschleunigungssensor immer nur die Summe der Beschleunigungen misst und es keinen Weg gibt, alleine nur mit dieser Information diese Summe in die einzelnen Komponenten aufzudröseln.
Karl Heinz schrieb: > Der springende Punkt ist aber, dass ein Beschleunigungssensor immer nur ... an einem Punkt misst und die Auflösung, erst recht die Genauigkeit, bei Weitem nicht ausreichen, um einen praxistauglichen Sensor mit vernünftigen Abmessungen zu bauen. Mir ging es nur um die oft behauptete Ununterscheidbarkeit von Gravitation vs. Beschleunigung und diese Ununterscheidbarkeit gilt eben nur, wenn man nur einen Punkt betrachtet.
Konrad S. schrieb: > Ununterscheidbarkeit von Gravitation vs. Beschleunigung und diese > Ununterscheidbarkeit gilt eben nur, wenn man nur einen Punkt > betrachtet. ... oder man es mit linearen Beschleunigungen zu tun hat. In rotatorischen Bewegungen gelten wieder andere Regeln. Zumindest wenn man etwas über die Geometrie der Bewegung weiss.
Karl Heinz schrieb: > Konrad S. schrieb: > >> Ununterscheidbarkeit von Gravitation vs. Beschleunigung und diese >> Ununterscheidbarkeit gilt eben nur, wenn man nur einen Punkt >> betrachtet. > > ... oder man es mit linearen Beschleunigungen zu tun hat. Die lineare Beschleunigung ist eben doch von der Gravitation unterscheidbar. (Oder habe ich dich jetzt missverstanden?)
Lass gut sein. Ich will jetzt nicht schon in wieder in diese Diskussion rein. Du kannst das eben. Alle anderen können es nicht.
Denk in 'ner ruhigen Stunde noch mal über den Winkel der Beschleunigungsvektoren zueinander nach. Sooo schwierig ist das nicht. ;-)
Konrad S. schrieb: > Denk in 'ner ruhigen Stunde noch mal über den Winkel der > Beschleunigungsvektoren zueinander nach. Sooo schwierig ist das nicht. > ;-) Ich denke eher schon, dass es ziemlich schwierig ist, in einem Kräfteparallelogramm nur mit der Kentniss der Resultierenden und einer Seitenlänge und ohne einen Winkel zu kennen, das Parallelogramm im allgemeinen Fall eindeutig zu rekonstruieren. Immerhin ist das der Versuch, ein Dreieck mit nur 2 Bestimmungsstücken zu konstruieren. PS: wir reden hier von einer beliebigen Orientierung des Sensors in Bezug auf die Gravitationsrichtung. Hab ich diese Orientierung, dann ist die Sache leicht. Hab ich sie nicht, dann kann ich sie nur mit den Daten des Beschleunigungssensors nicht nicht ermitteln.
Hallo, ich hab sowas ähnliches mal mit Hilfe der einfachen linearen Regression gelöst: - Werte in array einlesen - Regressionsgerade berechnen - die Steigung dieser Geraden mit Schwelle vergleichen Gruß Willi
Angehängte Dateien:
-

beschleunigung.png
16 KB
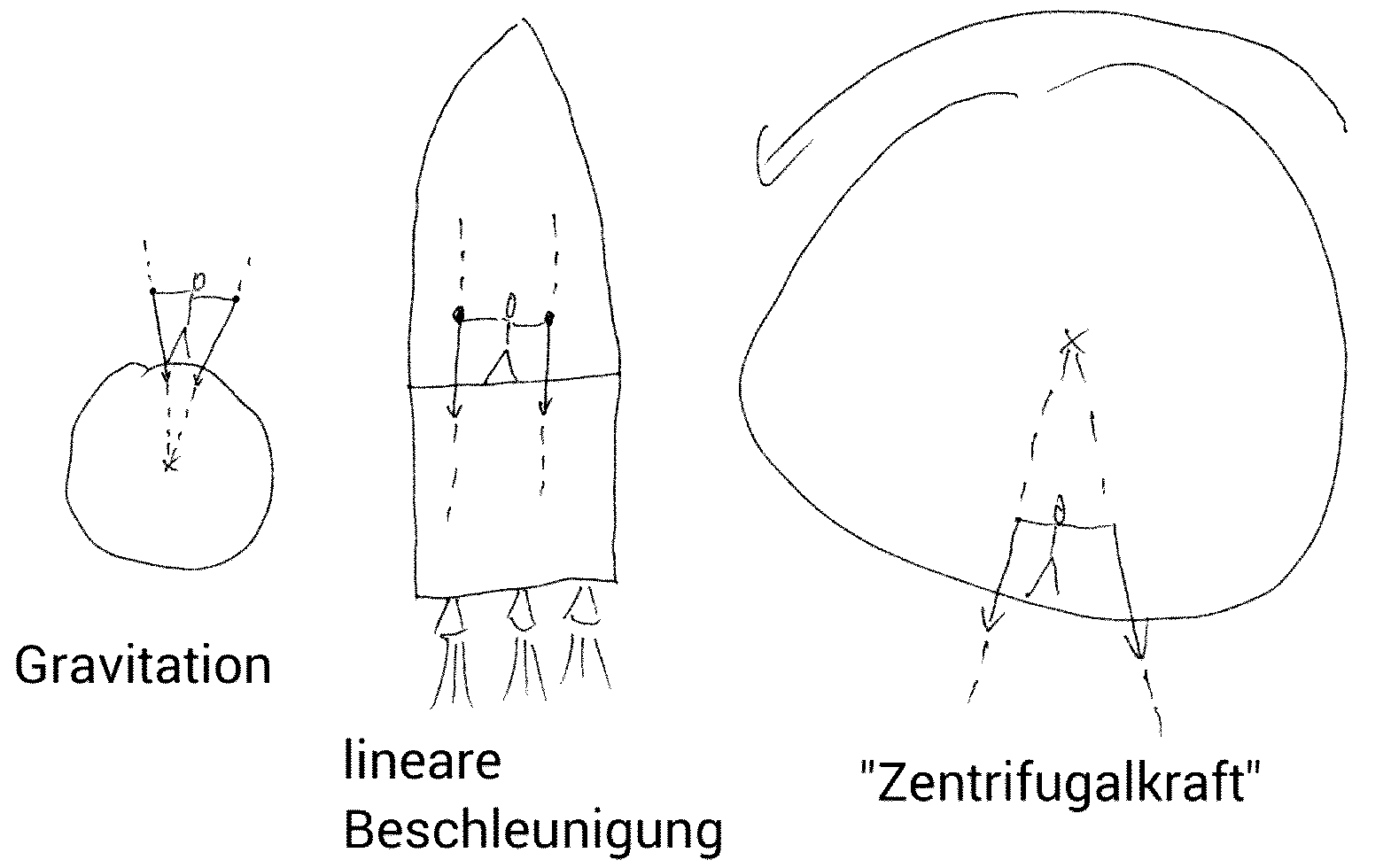
Kleine Skizze zur Veranschaulichung. Ich spreche davon, dass man die Beschleunigung an zwei geeignet gewählten Punkten misst. In der Skizze hält das Männeken also in jeder Hand einen "Beschleunigungssensor". Und durch Betrachtung der Lage der Vektoren zueinander lassen sich die drei Fälle - Gravitation, lineare Bescchleunigung, "Zentrifugalkraft" - voneinander unterscheiden. Bis eben auf die kleine Einschränkung, dass real existierende Sensoren dafür nicht ausreichen dürften (OK, das mit der Zentrifuge würde noch klappen).
Letzte Frage: ich habe Sekunden als Variablen im Timer. Wie schaff ich folgendes umzusetzen im c-Code: Wenn Sekunde sich ändert, read ADC. Also der Term "wenn Sekunde sich ändert" Danke
Lies gefälligst ein gutes Buch über C und verstehe dessen Inhalt. Lies ggf. noch Bücher über Algorithmen und Softwareentwicklung.
Solch einen Ausdruck selbst zu formulieren ist eine Kleinigkeit, sobald Du die Grundlagen der Programmiersprache verstanden hast. Du besitzt jedoch keinerlei Grundlagen. Das musst Du nachholen.
Ja schrieb: > Letzte Frage: ich habe Sekunden als Variablen im Timer. Wie schaff ich > folgendes umzusetzen im c-Code: > Wenn Sekunde sich ändert, read ADC. > Also der Term "wenn Sekunde sich ändert" Wie würdest DU das denn machen, wenn DU vor der Aufgabe stehst (und ein schlechtes Gedächtnis hast aber sauschnell bist)? Also ich würde: * mir Papier und Bleistift nehmen um mir was notieren zu können (Hinweis: sowas ist immer ein Hinweis darauf, dass man eine Variable braucht) * dann würde ich zuerst mal auf meine Uhr sehen und mir die aktuelle Sekunde notieren. Die ist zb jetzt gerade 23 * in meiner laufenden Aktion würde ich immer wieder auf die Uhr sehen, die Sekunden ablesen und mit dem vergleichen, was auf dem Papier steht. Da ich sauschnell bin, lese ich von der Uhr zb ab: 23 Auf meinem Papier steht auch 23, also hat sich die Sekunde nicht verändert. Es ist immer noch dieselbe Sekunde. * ich mach ein bischen was anderes und schau dann wieder auf die Uhr. Ich lese ab: 24 Ein Blick auf mein Papier zeigt mir, dass die 23, die dort stehen nicht identisch sind zu den 24 die ich jetzt gerade abgelesen habe. Bingo! Die Sekunden haben sich offenbar verändert! Also mach ich mein Ding, das ich jede Sekunde machen möchte und notiere mir auf dem Papier: 24 * nach kurzer Zeit schau ich wieder auf die Uhr und lese ab: 24 Ein Blick auf das Papier zeigt mir: 24. Die aktuelle Sekunde stimmt mit der notierten überein. D.h. seitdem ich das letzte mal die Sekundenaktion gemacht habe, ist nocht keine Sekunde vergangen. und so geht das immer weiter dahin. Uhr ablesen und mit dem vergleichen, was auf dem Papier steht. Stimmen die beiden Zahlen überein, dann hat sich offenbar die Sekunde nicht verändert. Stimmen sie nicht überein, dann hat eine neue Sekunde begonnen, ich mach mein Dinge und notiere mir diese neue Sekundenzahl, damit ich bei der nächsten Ablesung wieder weiss, wann ich das letzte mal mein Ding gemacht habe. Eigentlich ganz simpel. Selbst Kleinkinder können diese Strategie intuitiv anwenden. Eine Veränderung festzustellen bedeutet IMMER, dass man sich irgendwo einen früheren Zustand merken muss. Ob sich das Bild einer Stadt im Laufe der Zeit verändert, kannst du nur feststellen, wenn du das heutige Bild mit einem Photo von früher vergleichst. Hier ist das Photo von früher genau das, was bei mir Papier und Bleistift war. Aber egal wie: um das Festhalten des aktuellen Zustands, damit man in der Zukunft mal mit diesem Zustand vergleichen kann, kommt man nicht rum. Das folgt schon daraus, dass man als Mann auf die Frage seiner besseren Hälfte "Schatz, fällt dir an mit irgendeine Veränderung auf" besser die Haarfarbe von gestern noch im Gedächtnis parat hat. Gedächtnis ist das, was man in einer Programmiersprache eine Variable nennt. Stellt man also für 'Haarfarbe_Frau' keine Gedächtnis Speicherzellen ab, dann hängt sehr bald der Haussegen schief, weil man dann eben eine entsprechende Veränderung nicht feststellen kann.
1 | Haarfarbe_Frau = Frau ansehen; |
2 | |
3 | while( laufend ) {
|
4 | |
5 | Haarfarbe_jetzt = Frau ansehen; |
6 | |
7 | if( Haarfarbe_jetzt != Haarfarbe_Frau ) {
|
8 | Kompliment machen; |
9 | Haarfarbe_Frau = Haarfarbe_jetzt; |
10 | } |
11 | |
12 | } |
Wobei das bei Frauen trickreich werden kann und die Frage als Fangfrage qualifiziert werden muss. War sie nicht beim Frisör und hat sich statt dessen ein neues Kleid gekauft, dann hängt nach einem Kompliment über die vermeintlich neue Haarfarbe erst recht der Haussegen schief. Aber das ist dann eine andere Geschichte und das zu vermeiden erfordert wieder andere Variablen, in denen man sich Dinge merken muss.
1 | volatile unsigned int sekunde; |
2 | volatile unsigned int sekundeCOM; |
3 | volatile unsigned int sekundeCOM2; |
4 | |
5 | int main(void) |
6 | {
|
7 | sekundeCOM = sekunde } |
8 | |
9 | while(1) |
10 | {
|
11 | sekundeCOM2 = sekunde; |
12 | if (sekundeCOM2 != sekundeCOM) |
13 | {
|
14 | sekundeCOM = sekundeCOM2; |
15 | |
16 | } } |
17 | [....]
|
18 | |
19 | ISR(TIMER1_COMPA_vect) |
20 | {
|
21 | millisekunden++; |
22 | if(millisekunden == 1000) |
23 | {
|
24 | sekunde++; |
25 | millisekunden = 0; |
26 | if(sekunde == 60) |
27 | {
|
28 | minute++; |
29 | sekunde = 0; |
30 | }
|
31 | if(minute == 60) |
32 | {
|
33 | stunde++; |
34 | minute = 0; |
35 | }
|
36 | if(stunde == 24) |
37 | {
|
38 | stunde = 0; |
39 | }
|
40 | }
|
41 | }
|
?
@Karl-Heinz Wenn Du kein Ausbilder und/oder Lehrer bist, dann hättest Du es werden sollen, ja eigentlich werden müssen. Ich habe noch Keinen gesehen, der so anschaulich erklären konnte. (Das mußte ich mal sagen und nein: Das ist keine Schleimerei, das ist mein Ernst) MfG Paul
Ja schrieb: > ? Haus in ein neues Projekt rein, schliess den Timer an, mach eine triviale Operation wenn sich die Sekunden verändert haben, zum Beispiel eine LED am Ausgang umschalten und wenn die LED im Sekundentakt blinkt, weisst du das alles in Ordnung ist. Mehr Mut zum Risiko. Und mehr Mut auch mal ein Testprojekt zwischen zu schieben um eine bestimmte Technik zu testen. Mehr als das es nicht funktioniert kann dir nicht passieren! So lernt man. Wenn du dir hier jede 3 Zeilen Code absegnen lässt, lernst du genau gar nichts. Das Verfahren ist bekannt und es in Code zu giessen ist nicht schwer. Also: hau rein. Man muss nicht alles gleich ins endgültige Projekt einbauen, wo es mglw. noch 200 andere Sachen geben kann, die schief gehen. Man kann ruhig für ein Detailproblem mal ein eigenes Projekt eröffnen, in dem man sich intensiv mit einer neuen Technik auseinandersetzt und die getrennt von der großen Aufgabenstellung durchtestet. Mit den heutigen IDEs dauert das generieren eines neuen Projektes keine 20 Sekunden. Das geht schneller, als du hier deine Frage posten kannst.
Angehängte Dateien:
-

Unbenannt.png
29 KB
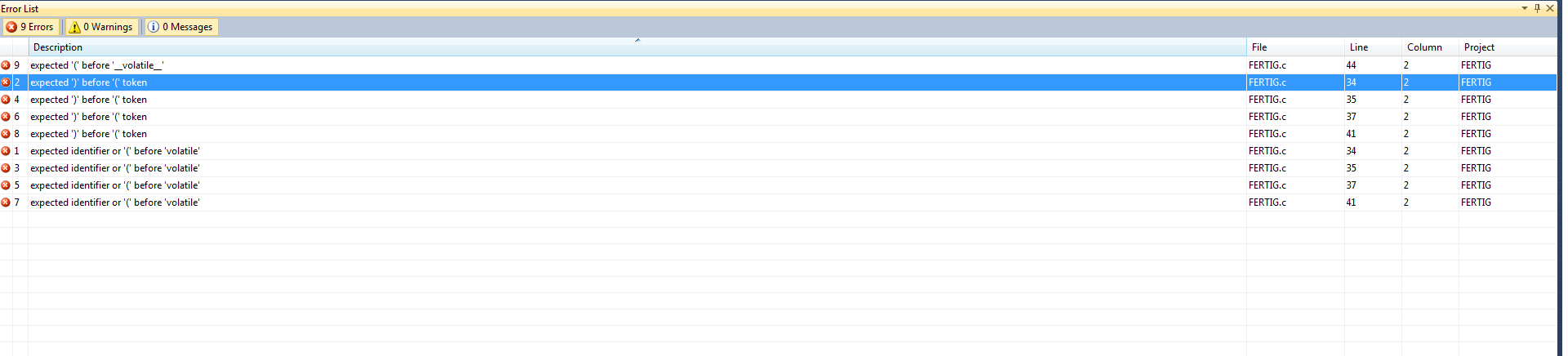
Okay, danke! Echt vielen dank! Hast mir sehr geholfen, aber eine Frage hätte ich da noch: ich scheine immer das selbe falsch zu machen. Hier Fehlermeldung + hier der Code:
1 | #define F_CPU 1000000UL /* 1MHz */ |
2 | |
3 | #include <avr/io.h> |
4 | #include <util/delay.h> |
5 | #include <avr/io.h> |
6 | #include <avr/interrupt.h> |
7 | #include <stdlib.h> |
8 | |
9 | |
10 | //Variablen für die Zeit
|
11 | volatile unsigned int millisekunden; |
12 | volatile unsigned int sekunde; |
13 | volatile unsigned int minute; |
14 | volatile unsigned int stunde; |
15 | |
16 | |
17 | |
18 | // Defines:
|
19 | #define LED1 (1<<PD5)
|
20 | #define LED2 (1<<PD6)
|
21 | |
22 | // Timer 1 konfigurieren
|
23 | TCCR1B = (1<<WGM12); // CTC Modus |
24 | TCCR1B |= (1<<CS11); // Prescaler 8 |
25 | // ((1000000/8)/1000) = 125
|
26 | OCR1A = 125-1; |
27 | |
28 | // Compare Interrupt erlauben
|
29 | // Compare Interrupt erlauben
|
30 | TIMSK = (1<<OCIE1A); |
31 | |
32 | // Global Interrupts aktivieren
|
33 | sei(); |
34 | |
35 | int main() |
36 | {
|
37 | // LED-Pins als Ausgang definieren
|
38 | DDRD |= LED1 | LED2; |
39 | |
40 | |
41 | while(1) |
42 | {
|
43 | if (sekunde == 5) |
44 | {
|
45 | |
46 | PORTD ^= LED1 | LED2; |
47 | _delay_ms(200); |
48 | |
49 | |
50 | }
|
51 | }
|
52 | }
|
53 | |
54 | |
55 | |
56 | ISR(TIMER1_COMPA_vect) |
57 | {
|
58 | millisekunden++; |
59 | if(millisekunden == 1000) |
60 | {
|
61 | sekunde++; |
62 | millisekunden = 0; |
63 | if(sekunde == 60) |
64 | {
|
65 | minute++; |
66 | sekunde = 0; |
67 | }
|
68 | if(minute == 60) |
69 | {
|
70 | stunde++; |
71 | minute = 0; |
72 | }
|
73 | if(stunde == 24) |
74 | {
|
75 | stunde = 0; |
76 | }
|
77 | }
|
78 | }
|
Muss ich vor volatile noch etwas schreiben oder wie?
1 | .....
|
2 | |
3 | // Defines:
|
4 | #define LED1 (1<<PD5)
|
5 | #define LED2 (1<<PD6)
|
6 | |
7 | // Timer 1 konfigurieren
|
8 | TCCR1B = (1<<WGM12); // CTC Modus |
9 | TCCR1B |= (1<<CS11); // Prescaler 8 |
10 | // ((1000000/8)/1000) = 125
|
11 | OCR1A = 125-1; |
12 | |
13 | ....
|
Ähm. In C sind ausführbare Anweisungen nur innerhalb von Funktionen erlaubt. OK, ich geb zu die Fehlermeldungen sind etwas missverständlich. Dazu müsstest du die Definition von TCCR1B kennen um die zu verstehen. Tut hier nichts zur Sache, denn: ausführbare Anweisungen gehören in Funktionen. (Du hast dich hier zu sehr vom Stichwort 'volatile' leiten lassen. Du musst mehr auf die Zeilennummern achten! Bringt dich denn ein Doppelklick auf die Fehlermeldung nicht zur bewussten Stelle mit dem Fehler? Sie ist zwar auch manchmal falsch, aber zumindest hättest du gesehen, dass deine volatile von der problematischen Stelle weit entfernt sind und sehr wahrscheinlich daher nichts damit zu tun haben)
Karl Heinz schrieb: > Ähm. > In C sind ausführbare Anweisungen nur innerhalb von Funktionen erlaubt. > OK, ich geb zu die Fehlermeldungen sind etwas missverständlich. Dazu > müsstest du die Definition von TCCR1B kennen um die zu verstehen. Tut > hier nichts zur Sache, denn: ausführbare Anweisungen gehören in > Funktionen. Gut zu wissen, vielen Dank!
Ja schrieb: > Gut zu wissen, vielen Dank! Diese Information hättest Du beim sorgfältigen Durcharbeiten jedes ordentlichen Lehrbuches von selbst erhalten.
Andreas Schweigstill schrieb: > Diese Information hättest Du beim sorgfältigen Durcharbeiten jedes > ordentlichen Lehrbuches von selbst erhalten. Andreas Schweigstill schrieb: > Lies gefälligst ein gutes Buch über C und verstehe dessen Inhalt. Lies > ggf. noch Bücher über Algorithmen und Softwareentwicklung. Andreas Schweigstill schrieb: > Solch einen Ausdruck selbst zu formulieren ist eine Kleinigkeit, sobald > Du die Grundlagen der Programmiersprache verstanden hast. Du besitzt > jedoch keinerlei Grundlagen. Das musst Du nachholen. Kannst Du bitte, bitte mal die Griffel von der Tastatur lassen, wenn Du nichts, aber auch gar nichts als diese ewige Lehrbuchplatte abzuspielen hast? Danke.
Ratgeber schrieb: > Kannst Du bitte, bitte mal die Griffel von der Tastatur lassen, wenn Du > nichts, aber auch gar nichts als diese ewige Lehrbuchplatte abzuspielen > hast? Er hat allerdings recht. Manche brauchen eben immer wieder einen Arschtritt, bis sie endlich begreifen, dass eine Programmiersprache zu erlernen etwas anderes ist als Briefmarkensammeln, bei dem man halt einfach mal anfängt und es wird schon irgendwie gehen. 2 Youtube Videos und 3 Webseiten (natürlich die mit nicht zu viel erklärendem Text, dann man will ja schliesslich nicht auch noch lesen) reichen eben nicht um wenigstens die einfachsten Grundlagen zu schaffen.
Karl Heinz schrieb: > Er hat allerdings recht. Nein, ER hat kein Recht -insbesondere deshalb nicht weil er im Gegensatz zu Dir keine Hilfestellung und keinen nützlichen Rat parat hat, sondern immer nur das Gleiche stupide wiederholt. Ich beobachte dieses Verhalten schon eine ganze Weile, nicht erst in diesem Beitrag. Nun war der Punkt erreicht, etwas dazu zu sagen.
Okay, ich befürchte zwar zerfetzt zu werden, aber vielleicht kriege ich ja doch eine Antwort: ein Delay-Befehl also _delay_ms(200ms) zum Beispiel: Verzögert dieser in einer Whileschleife den kompletten Ablauf oder wird, wenn dieser Befehl z.B. in einem if-Statement ausgeführt wird, nur die if-Zeile verzögert und der Rest läuft weiter so schnell ab? Danke
Ja schrieb: > Verzögert dieser in einer Whileschleife den kompletten Ablauf Ja. Zumindest erstmal in erster Näherung (siehe unten) > oder wird, > wenn dieser Befehl z.B. in einem if-Statement ausgeführt wird, nur die > if-Zeile verzögert und der Rest läuft weiter so schnell ab? > Danke Nein. Es gibt nur einen Punkt an dem Du Dich im Ablauf des Programmes befindest, wenns an dem Punkt nicht weiter geht dann hängts dort. Wie eine Person beim Einkaufen die sequentiell den Einkaufszettel abarbeitet, wenn das Finden der Erdbeeren in der riesigen Obst und Gemüseabteilung 2 Minuten dauert dann kann sie nicht gleichzeitig noch den Punkt "wenn frische Erdbeeren da sind dann bring auch Schlagsahne mit" gleichzeitig abarbeiten. Das geht nicht. Erst die Erdbeeren, dann die Sahne. Das geht nur wenn die Person zu zweit ist (Threads oder Interrupts). Aber auch die können sich gegenseitig blockieren und auch die sind nicht wirklich gleichzeitig (zumindest nicht auf Ein-Kern-CPUs) aber sie helfen zumindest indem man beim Nachdenken über das Problem und dem Schreiben des Programms zumindest aus logischer Sicht einfach so tun kann als würde man zwei separate Programme für zwei CPUs schreiben, das kann so manches komplexe Problem elegant entknoten, kann aber auch ungewünschte Seiteneffekte haben die man beachten muss wenn beide gelegentlich auf die selben Daten zugreifen sollen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.