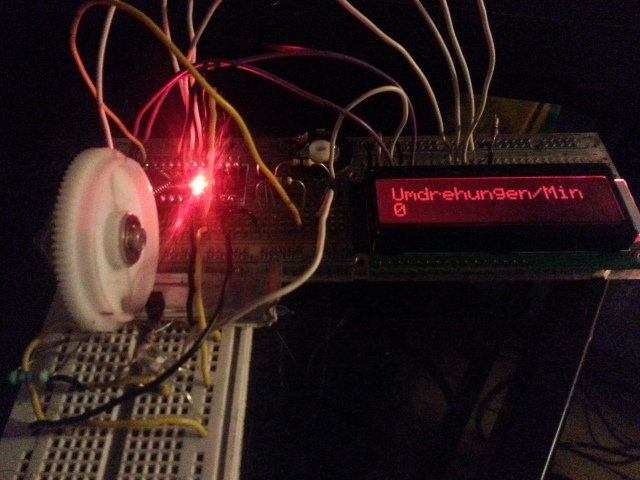
Hallo, Ich möchte mir irgendwann mal eine programmierbare Zündung bauen, und bin gerade dabei die Basics zu lernen. Daher habe ich mir (mit viel Hilfe vom Forum) einen Drehzahlmesser mit Arduino Nano und 2x16 LCD gebaut, inkusive Lichtschranken und kleiner Lochscheibe wo man einfach per Hand mal andreht und die Drehzahl ablesen kann. In weiterer Folge soll eine bzw mehrere LEDs aufblitzen wenn der Impuls vom LiSchra kommt. Wenn man einen Strich auf die Lochscheibe malt, kann man den dann wie beim Zündung abblitzen beobachten. Je nach Drehzahl und Verzögerung müsste man den Strich wandern sehen. Jetzt möchte ich den Blitzzeitpunkt, passend zur Drehzahl nach Belieben verstellen können...aber da haperts gewaltig an Verständnis :( Wie würdet ihr das lösen? Hier der Link zum Drehzahlmesser-Sketch: Beitrag "Re: Arduino Drehzahlmesser" Mfg
Eine Zündverstellung nach "spät" hab ich schonmal hinbekommen, hier der Code:
1 | |
2 | |
3 | |
4 | |
5 | |
6 | |
7 | |
8 | |
9 | |
10 | |
11 | |
12 | |
13 | |
14 | |
15 | |
16 | |
17 | |
18 | |
19 | |
20 | |
21 | |
22 | |
23 | |
24 | |
25 | |
26 | |
27 | |
28 | |
29 | |
30 | |
31 | |
32 | |
33 | |
34 | |
35 | |
36 | |
37 | |
38 | |
39 | |
40 | |
41 | |
42 | |
43 | |
44 | |
45 | |
46 | |
47 | |
48 | |
49 | |
50 | |
51 | |
52 | |
53 | |
54 | |
55 | |
56 | |
57 | |
58 | |
59 | |
60 | |
61 | |
Schaut ganz lustig aus den Strich auf dem Drehrad zu verfolgen, jetzt wärs halt schön je nach Drehzahl beliebige Verzögerungswserte zu haben. Kann man zB die Drehzahl durch 100 Teilen, und dann die Drehzahl als Index in einem Array benutzen, wo ich meine Verzögerungswerte je 100 Umdrehungen drin habe? Lg!
Angehängte Dateien:
-

KolbisBlitzer.jpg
150 KB
ich habe das bisher immer so gemacht Zeit einer Umdrehung messen, durch 360 bzw. 3600 Teilen je nach gewünschter Auflösung, dieser Wert entspricht dann halt 1° bzw. 0,1° und das dann mit dem Wert Multiplizieren wann gezündet werden soll abzügl. der Schließzeit. Angenommen ich möchte dann 10° vor OT Zünden eine Umdrehung dauert 4000 Takte 4000/3600=1,111... 1,111...x100=111,111.... 4000-111,111=3888,888...= Zündzeitpunkt und dann musst du noch ausrechnen wann du die Zündspule bestromst damit du zum ZZP abschalten kannst. Das ganze kann man dann über die Compare Match Funktion des Timers machen. Man übergibt also nur die beiden Werte wann die Spule ein und ausgeschaltet werden soll. Wenn man nur Blitzen will reicht ja einfach der eine Wert eine 10Watt LED ist dafür ausreichend, wenn man sie kurz und stark pulst
Ich habs mittlerweile hinbekommen, jetzt wärs interessant den Code zu optimieren. Ideen?
1 | |
2 | |
3 | |
4 | |
5 | |
6 | |
7 | |
8 | |
9 | |
10 | |
11 | |
12 | |
13 | |
14 | |
15 | |
16 | |
17 | |
18 | |
19 | |
20 | |
21 | |
22 | |
23 | |
24 | |
25 | |
26 | |
27 | |
28 | |
29 | |
30 | |
31 | |
32 | |
33 | |
34 | |
35 | |
36 | |
37 | |
38 | |
39 | |
40 | |
41 | |
42 | |
43 | |
44 | |
45 | |
46 | |
47 | |
48 | |
49 | |
50 | |
51 | |
52 | |
53 | |
54 | |
55 | |
56 | |
57 | |
58 | |
59 | |
60 | |
61 | |
62 | |
63 | |
64 | |
65 | |
66 | |
67 | |
68 | |
69 | |
70 | |
71 | |
72 | |
73 | |
74 | |
75 | |
lg
Antwort schreiben
Bitte melde dich an, um einen Beitrag zu schreiben.