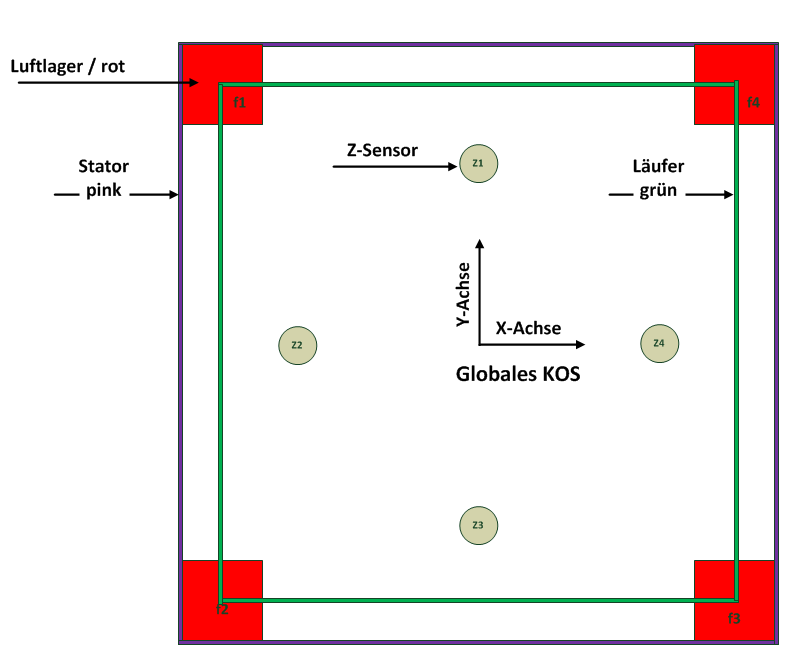
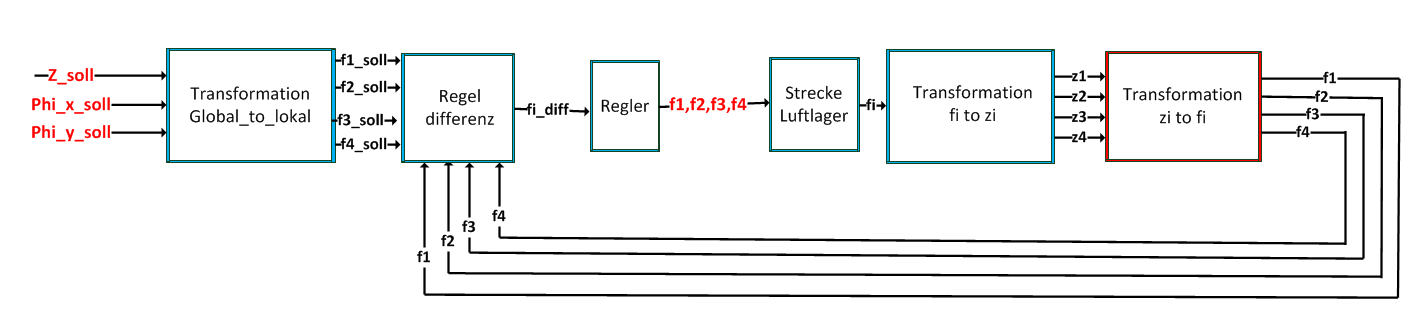
Hallo Leute, ich habe eine Frage: Ich habe einen Motor, der von Luftführungen frei levitiert. Und zwar ist mein Problem folgendes: Ich möchte den Läufer Regeln, d.h. ich gebe die Sollwerte vor, transformiere diese in die vier lokalen Größen, d.h. die vier tatsächlichen Höhen (Luftspalte) zwischen Führung und Läufer, regle diese vier Höhen und trans. dann zurück, wie im Bild dargestellt. Mit den Sensoren messe ich die Höhe zi, und durch die Geometrie berechne ich die tatsächlichen höhen zwischen fi und Läufer (in einem anderen Thread bereits besprochen). Mein Problem ist, dass ich nicht genau weiß, wie die regelung zurücktransformiert wird, d.h. mit den gemessenen zi_ist trans. ich diese zu fi_ist, das klappt. Die Sollwerte transformiere ich ebenfalls in diesen Koordinaten. Das klappt auch. Nur wie transformiere ich zurück ? Problem nämlich ist, dass das Gleichungssystem überbestimmt ist. Bzw. wie regle ich die tatsächlichen Höhen ? Ich hoffe mein Problem ist etwas verständlich?!
Das ist richtig, die Ebene im Raum ist durch 3 starre Aktoren bestimmt. Die reelen Aktoren sind aber nicht starr. Dann rechnet man eben 3 Stueck geometrisch ideal, und rechnet dann auf die 4, so wie sie stehen um.
Jetzt Nicht schrieb: > Das ist richtig, die Ebene im Raum ist durch 3 starre Aktoren > bestimmt. Die reelen Aktoren sind aber nicht starr. Dann rechnet man > eben 3 Stueck geometrisch ideal, und rechnet dann auf die 4, so wie sie > stehen um. Wenn ich das richtig verstanden habe, dann muss ich die totale Kraft in Z beziehungsweise die Momente in X und Y auf die vier Aktoren aufteilen, richtig?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.