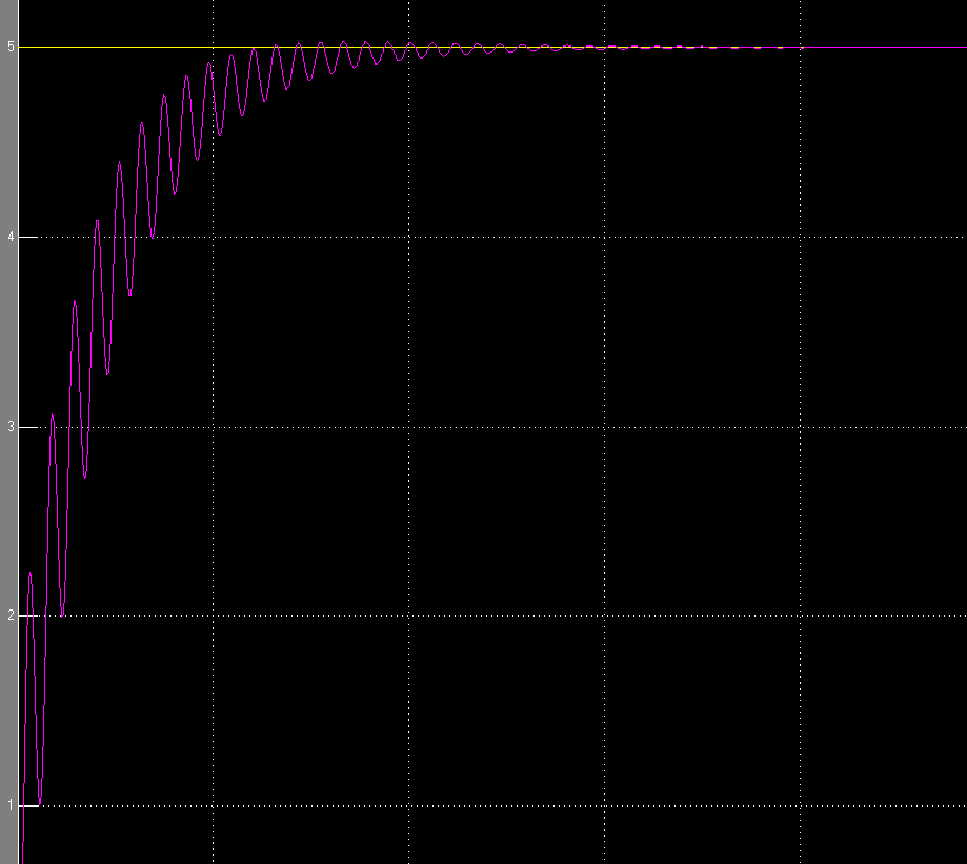
Hallo, ich versuche hier eine Regelstrecke mit der Ordnung 3 zu regeln in Simulink. Dabei bin ich nach den praktischen Einstellregeln vorgegangen, d.h. erst mal nur mit P-Anteil solange bis die Strecke schwingt, dann diesen Wert notiert und die Periodendauer. Dann habe ich entsprechend Kp, Ki und Kd berechnet und simuliert. Doch leider ist das viel zu langsam, bis der Endwert erreicht wird und es schwingt noch. Wobei die Dynamik erst mal im Vordergrund steht, wie erhöhe ich die Dynamik, sodass der Wert ganz schnell erreicht wird ? Gegenwärtig dauert es ca. 3 Sekunden, bis der Endwert erreicht wird. Um damit eine Kugel zum schweben zu bringen, ist das aber zu langsam. Danke für eure Antworten.
Angehängte Dateien:
-

xxx.png
4,2 KB
Was ich auch nicht ganz verstehe, da die Strecke bereits eig. ein I-Anteil hat, warum klappt die Simulation mit einem PD-Regler nicht ?
Benjamin schrieb: > Doch leider ist das viel zu langsam, bis der Endwert erreicht Die Strecke bestimmt die Geschwindigkeit der Regelung. Wenn die lansam ist, ist es halt so.
Reinhard ## schrieb: > Die Strecke bestimmt die Geschwindigkeit > der Regelung. Wenn die lansam ist, ist > es halt so. Naja, die größte Zeitkonstante liegt bei ca. 20ms....
In deinem Schaubild sind keine Achsen- bzw. Beschriftungen mit dabei ;-)
Benjamin schrieb: > Doch leider ist das viel zu langsam, bis der Endwert erreicht wird und > es schwingt noch. Da musst du schon mal konkreter werden, weil es keine allgemeine Lösung gibt. Prinzipiell lässt sich eine Strecke 3. Ordnung mit einem PD- und auch mit einem PI-Regler behandeln. Aber bei einer Stecke 3. Orndung nimmt man üblich einen PID-Regler, weil der schneller ist. Wie das genau geht, hängt von deinen Zeitkonstanten ab: Strecke Fs=V1*V2*V3/((T1p+1)*(T2p+1)*(T3p+1) mit T1>T2>T3 Regler Fr=Vr*(Tip+1)/Tip * (Tvp+1)/(Tv'+1) Tv' ist die unvermeidliche parasitäre Verzögerung des D-Anteils. Der offener Kreis hat die Übertragungsfunktion Fk=Fr*Fs , die optimiert wird. Jetzt zitiere ich aus dem Lehrbuch: Zuerst vereinfacht man die Übertragungsfunktion Fk, indem man eine Verzögerung durch Tv eliminiert. Es gibt gute Gründe (die ich mal weglasse) Tv=T2 zu wählen. Damit ist T2 weg. Jetzt gilt: 1. falls T1>T3,Tv' wählt man Ti=T1 daraus wird: Fk=1/(Tikp*(T3p+1)*(Tv'p+1)) 2. falls T1>>T3,Tv' wählt man T3<Ti<T1 daraus wird: Fk=Vk*(Tip+1)/Tip/T1p/(T3p+1) mit T1>>1 und Tv'<<1 Jetzt ist das Problem auf einen einfachen Fall reduziert, der vorher im Lehrbuch beschrieben ist und zu direkten Zahlenwerten für die optimale Regelung führt. Aber ich will nicht das ganze Buch abschreiben, und ich weiß nicht ob du noch folgen willst.
Benjamin schrieb: > Um damit eine Kugel zum schweben zu bringen, [...] Kugel? Schweben? Kann es sein, dass Du die Ist-Position der Kugel misst und als Reaktion die Spannung an der Spule veränderst? Wenn ja: Wie hängt die Spulenspannung mit dem Spulenstrom zusammen? Wie hängt der Spulenstrom mit der Kraft zusammen? Wie hängt die Kraft mit der Beschleunigung zusammen? Wie hängt die Kraft mit der Geschwindigkeit zusammen? Wie hängt die Geschwindigkeit mit dem Ort zusammen?
Diese Regelung ist eh nichtlinear, da der Zusammenhang Magnetische Kraft < - > Abstand nicht linear ist. Also linearisieren und allenfalls nochmals eine Groesse einfliessen lassen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.