Hallo, Nach einigen erfolgreichen Projekten mit 3D Druckern und CNC Fräsmaschinen (alle mit Arduino mega 2560 und Ramps1.4)möchte ich nun einen 5-6 Achsigen Knickarmroboter auf Basis eines Industrieroboters bauen. Ich möchte dazu auf jeden Fall Schrittmotoren mit Getriebe verwenden und bin nun auf der Suche nach einer günstigen Lösung für die Steuerung um dies umzusetzen. Am liebsten wäre es mir wenn ich dies auch wieder mit dem atmega 2560 und Ramps 1.4 (5achsen) hinbekommen könnte. Es gibt viele Projekte mit Servos aus dem Modellbaubereich, dies möchte ich aber auf keinen Fall. Leider bin ich auf dem Gebiet der Software eine Niete und weiß deshalb auch nicht wo ich eine Firmware herbekomme und wie ich diese konfigurieren muß, das zum Beispiel alle 5 Achsen einer Richtung folgen. Ich würde mich sehr freuen wenn mir jemand helfen könnte, der so etwas schon gebaut hat, und bin über jede Idee für Hardware, firmware und natürlich auch Software zur Steuerung dankbar. LG,Frank
Frank Schulze schrieb: > möchte ich nun > einen 5-6 Achsigen Knickarmroboter auf Basis eines Industrieroboters > bauen. Wozu? > Leider bin ich auf dem Gebiet der Software eine Niete Du hast sicherlich noch andere, besser ausgebildete Qualitäten. Sieh zu, dass du diese verfeinerst.
Im Moment möchte ich dies eher aus faszination an der Technik. Eine genauere spätere Verwendung steht noch nicht fest. Ev. werde ich vieleicht mal meine CNC Fräsmaschine damit be- und entladen.Wenn ich mal ein Projekt erfolgreich abgeschlossen habe, macht es mir sehr viel Spass das ganze weiter auszubauen und zu optimieren. Meine besser ausgebauten Qualitäten liegen im Bereich der Fertigung. Alles andere bringe ich mir so gut es geht bei. Leider habe ich eine Kleine Lernschwäche und brauche deshalb im bereich der Software jemanden der mir das Stück für Stück näher bringt. LG,Frank
Frank Schulze schrieb: > Leider bin ich auf dem Gebiet der Software eine Niete und weiß deshalb > auch nicht wo ich eine Firmware herbekomme und wie ich diese > konfigurieren muß, das zum Beispiel alle 5 Achsen einer Richtung folgen. Wie willst Du ohne fundierte Software Kentnissen dann das Projekt auch nur ansatzweise durchziehen. Ein 5 armiger Roboterarm ist SOFTWARE und MATHEMATIK. Also träum weiter, das gibt nie was.
Frank Schulze schrieb: > Im Moment möchte ich dies eher aus faszination an der Technik. Eine > genauere spätere Verwendung steht noch nicht fest. Ev. werde ich > vieleicht mal meine CNC Fräsmaschine damit be- und entladen.Wenn ich mal > ein Projekt erfolgreich abgeschlossen habe, macht es mir sehr viel Spass > das ganze weiter auszubauen und zu optimieren. Sorry, aber das liest sich so: Wenn ich mal groß bin, möchte ich Pilot werden.
Angehängte Dateien:
-

IMAG0343.JPG
240 KB -

IMAG0322.JPG
240 KB -

IMAG0102.JPG
330 KB -

IMAG0109.JPG
320 KB

Jup, und auch dies habe ich geschafft...wenn auch nur im RC Bereich ;) Ich habe bis jetzt alles geschafft was ich mir in den Kopf gesetzt habe. Es ist halt teilweise sehr schwer sich in neue Materie einzuarbeiten aber nicht unmöglich. Anbei mal ein Paar Bilder meiner letzten Projekte. Kenntniss-Stand am Anfang "0" Gebaut in 2 Wochen. Wo ein wille ist, ist auch ein Weg. Ich dachte eigentlich das solche Foren dafür da sind, Hilfe zu suchen. LG,Frank
Frank Schulze schrieb: > Ich dachte eigentlich das solche Foren dafür da sind, Hilfe zu suchen. Dann hast du, gemessen an deinen Fähikeiten es nicht geschafft, dein Intro korrekt zu formulieren. Wenn man sich deine Bilder so ansieht, fragt man sich, wie du z.B. den XYZ-Tisch softwaremäßig realisiert hast und ob dieser überhaupt funktioniert. Du solltest, um bessere Hilfe zu erhalten, erst einmal aufzeigen, über welches Wissenspotential du verfügst. Das kann keiner aufgrund deiner obigen Anfrage wissen. Never mind...
Frank Schulze schrieb: > Ich möchte dazu auf jeden Fall Schrittmotoren mit Getriebe verwenden und > bin nun auf der Suche nach einer günstigen Lösung für die Steuerung um > dies umzusetzen. Am liebsten wäre es mir wenn ich dies auch wieder mit > dem atmega 2560 und Ramps 1.4 (5achsen) hinbekommen könnte. > Es gibt viele Projekte mit Servos aus dem Modellbaubereich, dies möchte > ich aber auf keinen Fall. > Leider bin ich auf dem Gebiet der Software eine Niete und weiß deshalb > auch nicht wo ich eine Firmware herbekomme und wie ich diese > konfigurieren muß, das zum Beispiel alle 5 Achsen einer Richtung folgen. Schrittmotoren sind schlecht dafuer. Du willst also den Arm bauen und alles andere soll fertig sein ('Firmware herbekommen')? Wer nichtmal Inverse Kinematik googlen kann, sollte das Projekt vergessen.
Peter Xuang schrieb: > Frank Schulze schrieb: >> Ich dachte eigentlich das solche Foren dafür da sind, Hilfe zu suchen. > > Dann hast du, gemessen an deinen Fähikeiten es nicht geschafft, dein > Intro korrekt zu formulieren. Wenn man sich deine Bilder so ansieht, > fragt man sich, wie du z.B. den XYZ-Tisch softwaremäßig realisiert hast > und ob dieser überhaupt funktioniert. Hat er ja impliziert: In der Community gibts das alles fertig, das sucht er jetzt fuer den Roboter.
Schon mal hier reingeschaut? http://www.roboarm.de/ Ich hatte mal Anwenderlehrgänge bei KUKA und SEF. War nicht einfach, alleine die unterschiedlichen Koordinatensysteme. Dort konnte man ein offenes Getriebe ansehen: sehr aufwändig gebaut. Alles sehr stabil und robust. Nicht zu vergleichen mit einem XYZ-Portal. Vielleicht ist ein Scara-Roboter einfacher zu bauen. Und für eine CNC-Bestückung müsste es reichen. Waren in der Programmierung auch wesentlich einfacher. http://www.staubli.com/de/robotik/roboterarme/niedrige-traglasten/ Hier was zum lesen: https://www.htwsaar.de/ingwi/fakultaet/personen/profile/jannick-morsch/unterlagen-labore/versuche-automatisierungslabor/robo-versuch/Mitsubishi%20RV-2A%20Roboter%20Praktikum.pdf
Frank G. schrieb: > War nicht einfach, alleine die unterschiedlichen Koordinatensysteme. Das ist grundlegend. Wer damit Schwierigkeiten hat, sollte das Thema meiden.
Hi, was die Steuerung angeht, das ließe sich mit LinuxCNC recht einfach machen, ein Kinematikmodul gibts fertig. Gibt auch Leute, die so schon Roboter gebaut und gesteuert haben, z.B.: https://www.youtube.com/watch?v=Hnwzv0GNTc8 https://www.youtube.com/watch?v=9olpU79H0o8 http://www.alvarogil.com/cadcam/robot/ Aber einfach ist das sicher nicht. Ich ärger mich immer wieder über verschiedene Unzulänglichkeiten eines KUKA und hab schon oft drüber nachgedacht einen eigenen Arm zu bauen, aber damit das was wird müssten sich eine handvoll Leute zusammen tun, sich Mechanik, Elektronik, Software aufteilen furchtbar viel zu arbeiten und bereit sein tausende EUR auszugeben nur um einen kleinen Prototypen zu bekommen. Ein open source Roboter wär aber schon was schönes. Hat jemand Lust? Grüße Flo
Florian Rist schrieb: > Ich ärger mich immer wieder über verschiedene Unzulänglichkeiten eines > KUKA und hab schon oft drüber nachgedacht einen eigenen Arm zu bauen, > aber damit das was wird müssten sich eine handvoll Leute zusammen tun, > sich Mechanik, Elektronik, Software aufteilen furchtbar viel zu arbeiten > und bereit sein tausende EUR auszugeben nur um einen kleinen Prototypen > zu bekommen. Ein open source Roboter wär aber schon was schönes. Hat > jemand Lust? Es gibt doch schon soviele Projekte fuer sowas... Was koenntest du bei so einem Projekt beisteuern? Was sind denn deiner Meinung nach die Unzulaenglichkeiten eines Kuka? :3
Hi > Es gibt doch schon soviele Projekte fuer sowas... Naja, ich kenn nur Projekte die Kosten und Nachbaubarkeit in den Vordergrund stellen und darum auf 'alte' Technologie zurückgreifen und versuchen Industrielösungen nachzubauen. Das Ergebnis schneidet im Vergleich zu einem kommerziellen Industrieroboter schlecht ab. Ich denke ein Bastelprojekt könnte eigentlich sogar innovativer als die Industrie sein, weil die Anforderungen an den Manipulator deutlich verschieden ausfallen können. Kompatibilität mit bestehenden System z.B. ist egal, die zu erwartende Lebensdauer kann viel viel kleiner sein, Montage, Wartung etc. kann aufwändig sein, die Zuverlässigkeit kann viel kleiner sein, solange das Ding klein ist kann man auf viele der üblichen Sicherheitsfunktionen verzichtet. > Was koenntest du bei so einem Projekt beisteuern? Auf jeden Fall viel Mechanik, da Zugang und Erfahrung u.a. zu einer 5ach Fräse, auch auch jede Menge anderem Zeug. Könnte auch Mechanik sehr genau vermessen, nicht nur Teile, auch ganze Kinematik. Und ich hätte Applikationen, ungewöhnliche. :-) > Was sind denn deiner Meinung nach die Unzulaenglichkeiten eines Kuka? Im Moment: zu groß, zu wenig Sensoren, zu wenig Möglichkeiten der on-line Steuerung (das ist zwar kein grundsätzliches Kuka Problem, ich hab bloß leider kein RSI-XML geschweige den das FRI, das z.B. es z.B. zum Kuka LBR mit KRC 4 gibt) Was die Sensoren angeht,der LRB hat ein paar DMS aber es bräuchte mehr, z.B. viele billige kleine Kameras überall, Auswertung der Bilder wäre kein großes Problem mehr und man könnte umfassendes Modell der Umgebung haben und nicht wie der kleine Kuka erst auf Berührung über DMS Sensoren reagieren. Ich hab kein fertiges Projekt im Kopf, aber ich hab den Eindruck man könnte was erreichen indem man aktuelle Entwicklungen nimmt und nutzt bzw. alte enger integriert. Der Kuka hier hat schweren AC Servos, Harmonicdrives, Resolver, jede menge Kabel zum Schaltschrank, der Servo Control Loop läuft auf einem unzugänglichem FPGA. Das ginge doch moderner leichter dynamischer, ironless BLDCs, höhere Drehzahlen größere Untersetzung, Vielleicht 1:10 über ein Planetengetriebe, dann 1:100 mit Harmonicdrive, oder vielleicht besser ein mehrstufiges Zykloidgetriebe, das hätte ein Losbrechmoment, weniger Gefahr der Beschädigung, Absolutwehrgeber am Gelenk zusätzlich zum Encoder auf der Motor Achse, DMS im Gelenk, nicht nur für Drehmont sondern in 6achse, Servo Controller und Motortreiber direkt am Motor, Wasserkühlung, Hohlachse für interne Kabelführung, alles eng zusammen gepackt. Allein wenn man das Paket aus Drehgeber, Getriebe, Motor anschaut, da könnte man viel ineinander stecken und Größe und Gewicht sparen (hat die Industrie ja auch schon gemacht, siehe LBR und andere). Service wird dann schweig, macht aber nix. Das geht nicht unbedingt im großen Maststab aber klein, 1000-1500 mm reach, 5kg payload denke ich könnte man da schon was erreichen. Man müsste ein Modul entwickeln, aus dem man dann den Manipulator kombiniert, wie beim Kuka Light Weight oder dem neueren Schunk Powerball oder Dextrous. Die sind eh nicht schlecht, aber 100k EUR reichen da noch nicht. Naja, was ich mir da zusammenträume kostet 200k pro Stück und 10 Jahre und 1000k Entwicklung und verletzt 1000 Patente... Vielleicht mit ein paar Leuten an ein paar Unis... Wenn man sich anschaut, was die Formula Student Leute so zusammenbringen, grundsätzlich kann man gemeinsam schon tolle Sachen machen. Grüße Flo
Florian Rist schrieb:
[...]
Knappe Antwort wegen wenig Zeit:
Kosten muessen im Vordergrund stehen - sonst wird man ja noch teurer
als kaufbare IR. Innovativer und besser als bestehende Hersteller? Sehe
ich nicht.
Zu Kuka: Zu gross? Die haben doch Modelle mit einer Hand voll kg
Payload, was ist daran zu gross?
Nur weil du kein RSI hast, sind die Moeglichkeiten der
Online-Steuerung ja nicht beschraenkt ;) RSI zu kaufen waere dabei noch
billiger als der Bau eines eigenen Roboters. Und damit kann man viel
Spass haben!
Warum Umgebung mappen usw - ist nicht Aufgabe der Robotersteuerung, und
du kannst den ganzen Kram ja machen und online eingreifen - aber in der
Industrie brauchts eben keiner.
Zum Rest: Kostet eben mehr als fertige Roboter, also absolut
uninteressant. Wenn du sowas machen willst, musst du wohl zu Kuka in die
Entwicklung ;)
Fuer zuhause bleibt das ganze einfach Spielerei, die nicht viel kosten
darf - wenn du es industriell nutzen willst, sind die Anforderungen
anders, ja, zufaellig so, dass kaeufliche IR gut passen.
Hallo Hat denn jemand eine Idee für einen kostengünstigen Aufbau eines Knickarmroboters ?
ja, die habe ich. Nur ist, genau wie ich am Anfang Geschrieben habe, immer noch die Frage welche Steuerung,Firmware und Software.
Du hast die folgenen Möglichkeiten: 1. Auf dem PC kannst du die Bahn berechnen. Dann kannst du die Bahnpunkte auf den Mikrocontroller übertragen. Der braucht sie dann "nur" noch an die Stepper zu verteilen. Dadurch kannst du einen "einfachen" Mikrocontroller verwenden. 2. Du kannst die Berechnung auf dem Mikrocontroller machen. Der muss dann alles tun. Ich wurde einen 32-Bit-Prozessor (ARM) mit ordentlich Speicher (>=128 MByte) nehmen. Eine Frage: Willst du nur eine vorgegebene Bahn fahren oder auch an bestimmten Punkten anhalten und auf ein Ereignis warten?
Hallo Kaninchen, Vielen Dank für die Antwort. Im Moment bin ich hin und hergerissen ob ich die günstige version mit dem Atmega 2560 und Ramps 1.4 nutze oder mit -Encoder 400P/R Incremental Rotary Encoder 400p/r AB phase encoder 6mm S, - 5 Axis USB Mach3 Controller Card 50KHz CNC Breakout Interface Board Win7/8/XP/2k, und -CNC Single Axis FMD2725B 2 Phase 2.5A Stepper Motor Driver Board Controller arbeite. Ich hätte schon gerne die Möglichkeit, auf ein Ereigniss, wie zum Beispiel eine Be- und Entladefreigabe zu warten. Ich dachte da auch den Aux bei Ramps 1.4 Das permanent ein Rechner an dem Board hängt wäre dabei kein Problem. LG,Frank
Hallo Frank Je nach dem was du fuer Antriebe verwendest koennte man sich mal im Opensource Bereich umsehen. Gruss Bernd
Ich dachte beim Antrieb an diese Motoren. http://www.ebay.de/itm/DE-Ship-3pcs-OSM-Gear-Ratio-14-1-Nema-17-Geared-Stepper-Motor-1-7A-High-Torque-/231471248219?pt=LH_DefaultDomain_77&hash=item35e4c2f35b Bin aber im Moment noch unschlüssig.
Hallo Frank, in Sachen Steuerung würde ich dir einen PC mit LinuxCNC und einer I/O-Karte von MESA (z.B. 5I23) und Motoren Encoder und Motortreiber Deiner Wahl empfehlen. Das in Betrieb Nehmen der Motoren jedenfalls wird damit wirklich einfach. Schrittmotoren sind vielleicht nicht die erste Wahl, aber billig und leicht verfügbar. Unabhängig vom Motor dürfte das größte Problem sein brauchbare Getriebe zu bekommen. Die Drehmomente mit denen man es zu tun bekommt sind auch bei kleinen Armen erschreckend hoch, 50Nm hat man da ganz schnell zusammen und das Getriebe muss ja auch noch möglichst steif und spielfrei sein. Was die notwendige Mathematik angeht, für LinuxCNC gibts mehrere passende Module. Eines ist robot6kins, siehe auch: http://alvarestech.com/temp/RoboAseaIRB6S2-Fiat/CinematicaExemplosManuaisConfigurador-DH-EMC/EMC-6-axis-serial-robot-2.pdf Mit IKFast, Teil von ROS könnte man sich sehr leistungsfähige Kinematikmodule generieren lassen. Die in LinuxCNC zu nutzen ist aber ein gewisser Aufwand: http://wiki.linuxcnc.org/cgi-bin/wiki.pl?Ikfast Simulieren will man den Roboter vermutlich auch, Gazebo oder v-rep wäre da vermutlich meine erste Wahl. Grüße Flo
Dann schau dir mal den st12 500 von St robotics an. Kann günstig nachgebaut werden wenn CNC vorhanden ist. In den servismaterial sind auch genaue Zeichnungen und technische Angaben, auch über das system zur Anzeige wenn die Riemen nacjgesoannt werden müssen.
Vielen Dank für die Anregungen. Ich werde nun verschiedene versionen Preislich durchrechnen und mich dann für eine lösung entscheiden. Auf jeden Fall habe ich nun ein gutes Gefühl bei diesem Projekt einen Erfolg zu erzielen. Ans Ziel komme ich eigentlich immer, mal schauen wie ich voran komme. Ich werde nun den elektronischen Bereich etwas zur Seite legen und mich mit der Konstruktion befassen. Für den Prototyp werde ich erstmal Speerholz nehmen. Das ist günstig, lässt sich gut bearbeiten und stellt für meine CNC Fräse auch kein Problem dar. Der St12 geht schon in die richtige Richtung, entspricht aber noch nicht ganz meinen optischen Ansprüchen. Die Pläne dafür stelle ich gern für jeden der Interesse daran hat zur Verfügung.Wäre schön wenn sich noch jemand Bereit erklären würde sich um die passende Firmware zu kümmern sobald ich weiß was ich für ein Board nutzen werde. Mit der LinuxCNC variante kann ich mich anfreunden, an Rechnern mangelt es mir zum Glück nicht. Muss mich nur mal darin einarbeiten, denn auch da bin ich Neuling. LG,Frank
Für fw, nimm einfach grbl, kann 6 axen
kennt sich jemand mit diesem Board aus? http://www.ebay.de/itm/CNC-5-Achse-Schrittmotor-Endstufe-Steuerung-Interface-Platine-fur-Mach3-pumpen-/291054482697?pt=LH_DefaultDomain_77&hash=item43c432f509 oder http://www.ebay.de/itm/CNC-5-Achsen-USB-Controller-Karte-Mach3-Breakout-Interface-Board-50KHz-fr-Win7-8-/161276721781?pt=LH_DefaultDomain_77&hash=item258cd77a75 Ich würde diese treiber dafür nehmen. http://www.ebay.de/itm/221719197372 Lg,Frank
Hallo Frank Ich weiss nicht ob Motoren sinnvoll sind Was ist mit Servos aus dem Modellbau in Industrieausführung ? Ein Ansatz wäre Hier http://www.ebay.de/itm/New-6-DOF-Manipulator-Aluminum-Robot-Arm-Kits-/160934066564?pt=LH_DefaultDomain_0&hash=item25786af984 mit Modulen und der Software von hier https://www.pololu.com/category/12/rc-servo-controllers Gruss Bernd
Hallo, genau dieses "Spielzeug" möchte ich nicht bauen. ich hatte mich schon nach Big Scale Servos umgeschaut, aber mir sagt dies nicht zu. Trotzdem danke. LG,Frank
Das Schwierigste am Ganzen wird wohl die Mathematik sein. Bei 5 Achsen wird man wahrscheinlich mehrere Moeglichkeiten fuer eine Position haben. Sobald man am Bewegen sind die dann nicht mehr identisch. Man sollte Drehungen jeweils entlang dem niedrigsten Massentraegheitsmoment durchfuehren. Nicht alle Wege sind gleich gut geeignet um dazwischen auch anzuhalten. Resp eine Bewegung, bei der angehalten werden muss ist sehr verschieden zu einer, die kontinuierlich ist. Wenn noch kein konkretes Ziel einer Anwendung existiert, wuerd ich mal empfehlen bei zu Simulationen bleiben. Da kann man sich genuegend verweilen. Es gibt in der Industrie genuegend viele beliebig schlechte Ansaetze wie man's falsch machen kann. Auch bei nahmhaften Firmen. Ohne Namen.
Angehängte Dateien:
-

K1600_Robo_V2.0.JPG
52 KB -

K1600_Robo_V2.1.JPG
54 KB -

K1600_Robo_V2.2.JPG
49 KB -

K1600_Robo_V2.3.JPG
49 KB
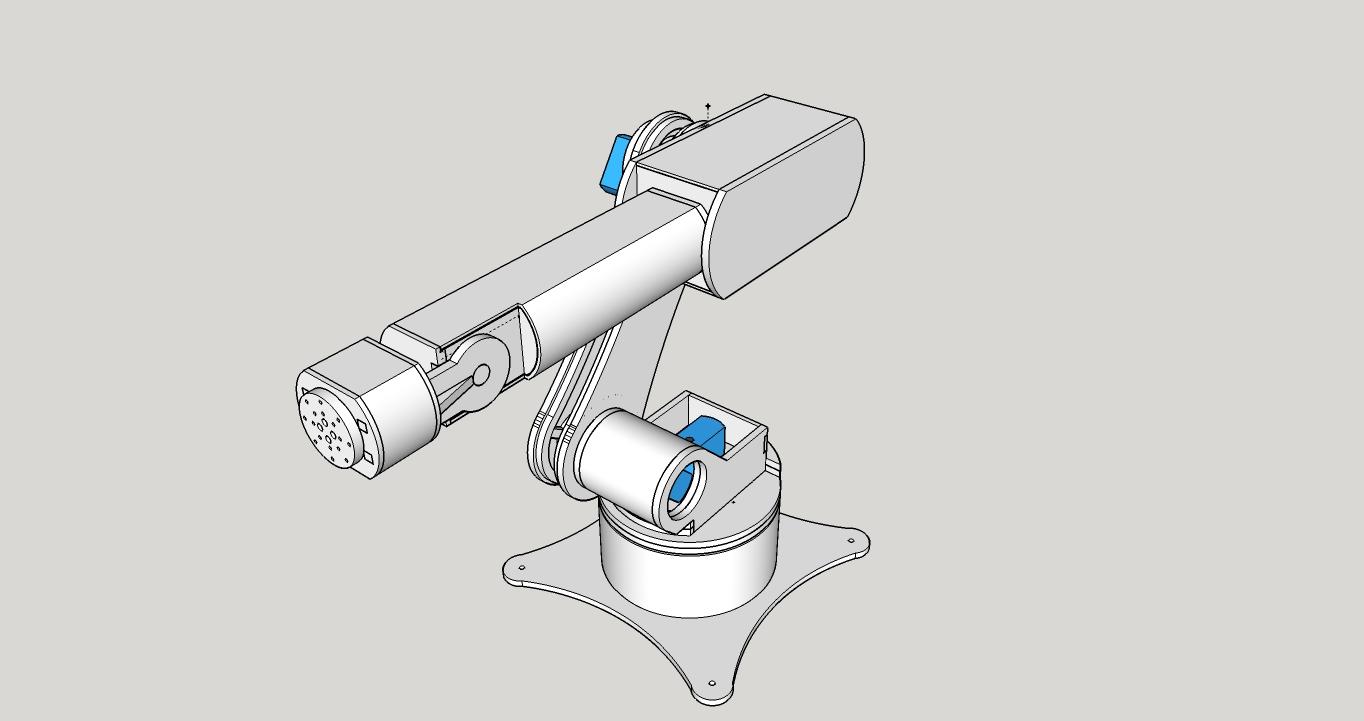
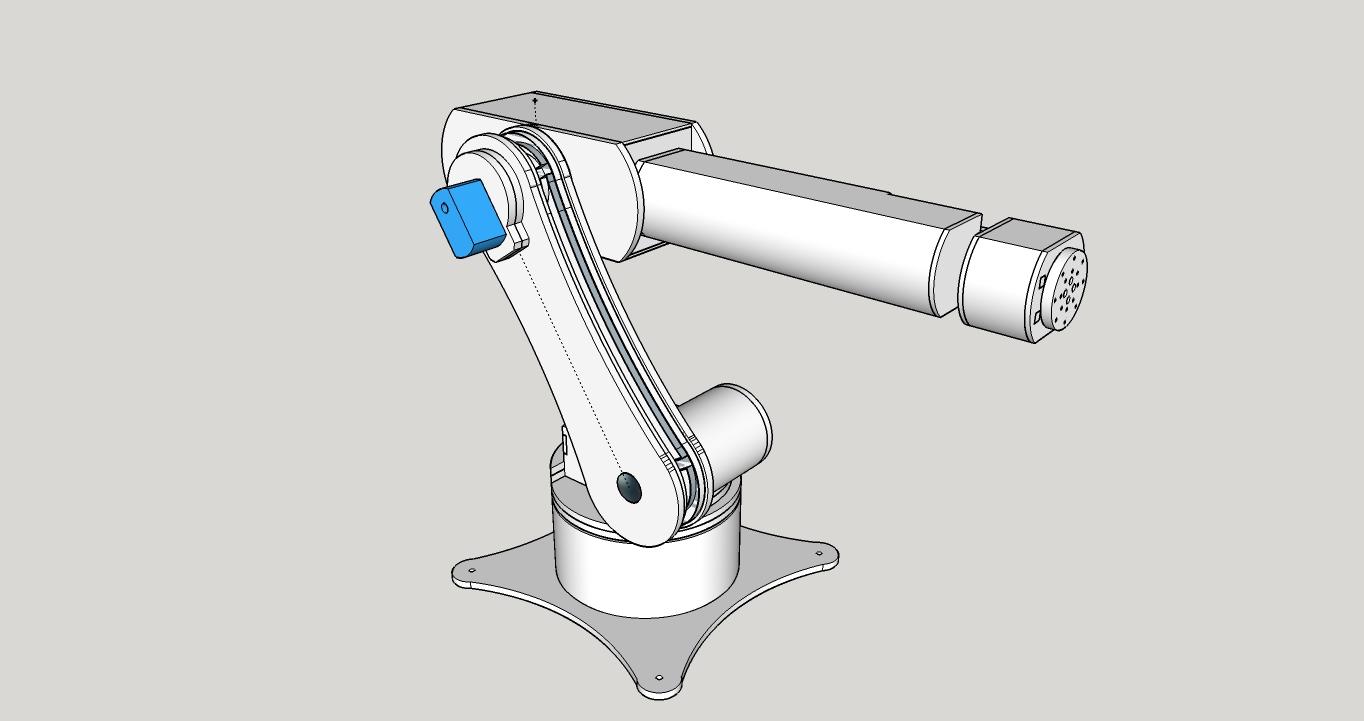
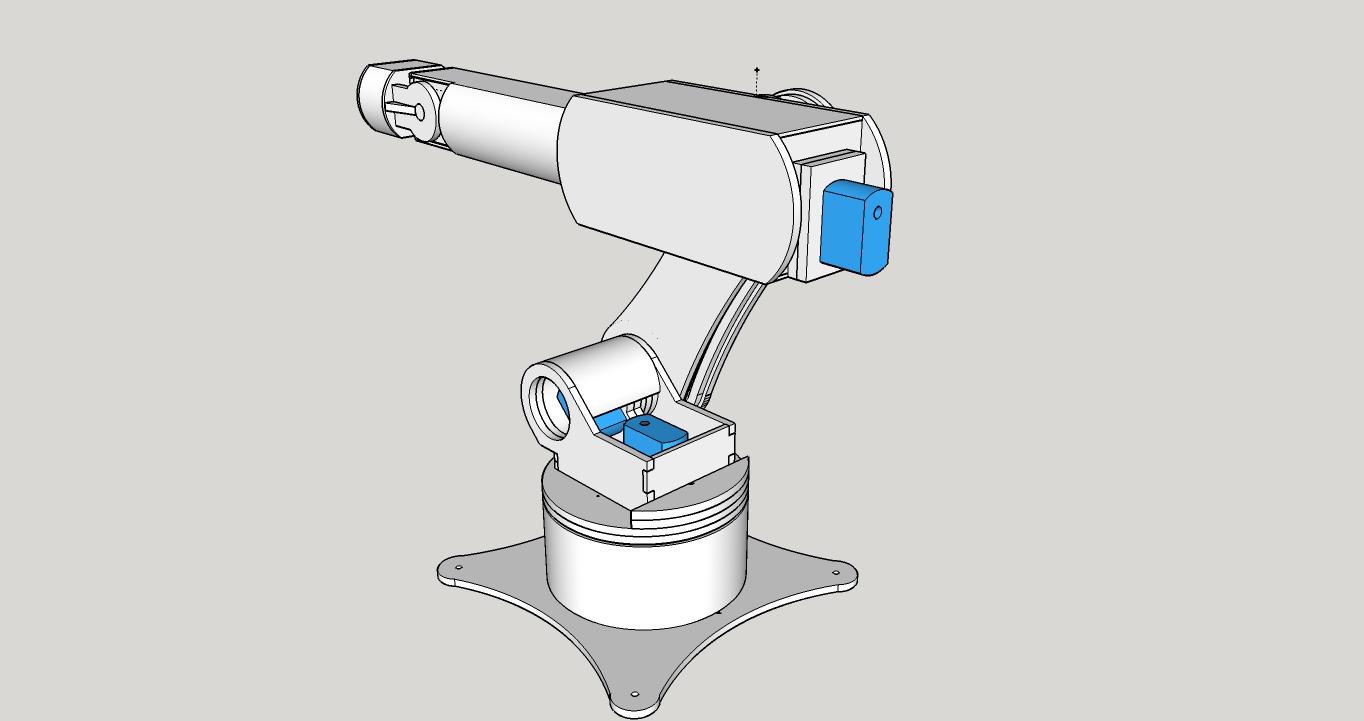
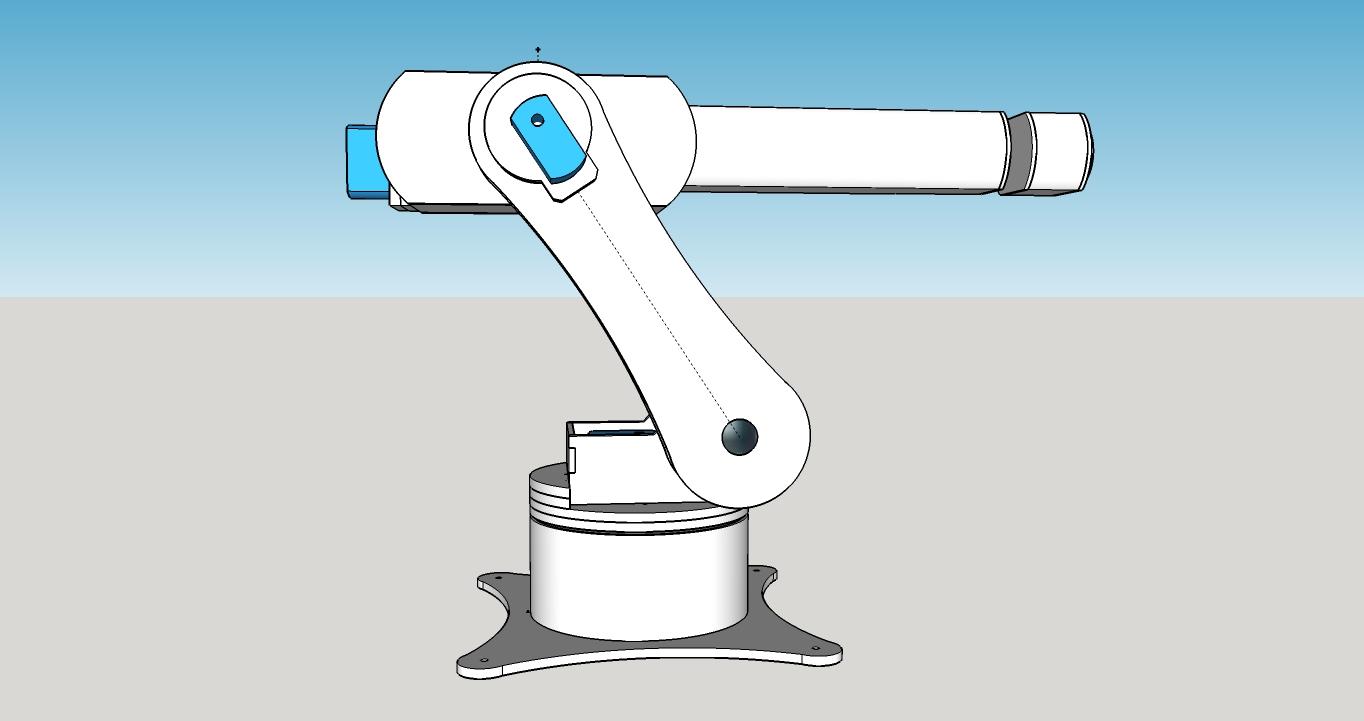
Hallo zusammen, Die Construktion ist nun Abgeschlossen und die ersten teile gefertigt. Anbei ein paar Bilder.( Als Maßstab: Grundplatte 300x300mm ) Ich habe mich nun doch für Big Scale 20kg Servos entschieden.Jede Achse ( 6 ) ist zusätzlich doppelt Kugelgelagert. Als Controller habe ich den http://www.ebay.de/itm/221210591650?_trksid=p2060353.m2749.l2649&ssPageName=STRK%3AMEBIDX%3AIT SainSmart uno R3 bestellt. Mal schauen wie ich das mit der Software hinbekomme, denn das ist meine Schwachstelle. Ich hätte auch gern das der Roboter auf Start und Stop-Signale anderer Komponenten reagiert. Zum Beispiel be-und entladefreigaben. LG,Frank
Ganz toll. Und das Problem ist nun ?
Frank Schulze schrieb: > Mal schauen wie ich das mit der Software > hinbekomme, denn das ist meine Schwachstelle. Ich hätte auch gern das > der Roboter auf Start und Stop-Signale anderer Komponenten reagiert. Zum > Beispiel be-und entladefreigaben. Ich hab noch keine Ahnung mit welcher Software ich das ganze Steuere. Besonders die abfragen für Wartepositionen. LG,Frank
Naja, der Controller gibt doch schon was vor. Was auch immer das fuer ein Controller aus der Bucht ist. Allenfalls ist ein Steuerprogramm dabei, dann kann man das Ganze baukastenmaessig zusammenclicken, od er nur ein Compiler, und dann muss man's zu Fuss machen. Wo liegt denn das Problem ? Spezifisch bitte. Wenn du bei "keine Ahnung" stehenbleibst, geht die Mechanik eher kuerzerfristig in den Metallabfall.
Zuerst bräuchte ich mal eine Halbwegs vorgefertigte Firmware. Ich denke das ich dann wie damals beim Drucker mich damit erstmal vertraut machen muß und schauen ob ich erste bewegungen hinbekomme.Da werde ich dann sicher hilfe benötigen und kann auch genauer sagen wo es hängt. Im Laufe der Woche werden die Teile kommen und bis zum Wochenende hab ich auch die restlichen Bauteile gefertigt. LG,Frank
Frank Schulze schrieb: > Ich hätte auch gern das > der Roboter auf Start und Stop-Signale anderer Komponenten reagiert. Zum > Beispiel be-und entladefreigaben. Frank Schulze schrieb: > Ich hab noch keine Ahnung mit welcher Software ich das ganze Steuere. > Besonders die abfragen für Wartepositionen. ... zeigt Deine völlige Ahnungslosigkeit. Es wird dann wohl bei den CAD Bildchen bleiben.
Die Positionen abfragen. Bei Schrittmotoren muss man die Positionen wissen, oder man hat Sensoren, die das erledigen. Was muss man im Fall von Schrittmotoren ohne Positionssensor machen, um die Position bei Powerup herauszufinden ? Man muss einem Referenzpunkt anfahren. An diesem Referenzpunkt schaltet ein Mikroschalter der eingelesen wird. Man benoetigt einen Referenzpunkt pro Achse.
@Frank Schulze Jetzt tu mal Butter bei die Fische, wenn Dir hier geholfen werden soll und beantworte mal konkret folgende Fragen: Kannst Du auf Microkontrollern Rampen, Beschleunigungen usw programmieren und zwar so, das sich alle Achsen gleichzeitig nach Vorgaben bewegen? Das impliziert natürlich auch das dazu notwendige mathematische Wissen. Hast Du ausreichende Elektronik Kenntnisse um das Projekt umzusetzen, egal ob mit Servos oder Schrittmotoren? Hast Du ausreichende mechanische Kenntnisse und das notwendige Werkzeug um den Roboterarm zu bauen? Wie ich Deinen Aussagen im bisherigem Verlauf des Threads mitbekommen habe, willst Du aus irgendwelchen Code-Schnipseln aus diversen Quellen was zusammen stricken. Das beantwortet eigentlich meine erste Frage schon mit "Nein".
Angehängte Dateien:
-

K1600_IMAG0458.JPG
360 KB

Hallo Albert, schön Dich hier zu lesen. Ich fange mal bei letzterem an. Albert M. schrieb: > Hast Du ausreichende mechanische Kenntnisse und das notwendige Werkzeug > um den Roboterarm zu bauen? Ich Habe Werkzeugmacher im Bereich Stanz und Umformtechnik gelernt und danach Jahrelang im Sondermaschinenbau Bereich Automatisierungstechnik Gearbeitet. Ich hatte fast täglich mit Reis-Robotern zu tun, weswegen sich meine Konstruktion auch stark an diese anlehnt. Dank Deiner Software funktioniert meine CNC Fräsmaschine Perfekt und ich kann alle für den Roboter notwendigen Teile Fertigen. Lager,Servos und Controller sind bestellt und dürften in den nächsten Tagen eintreffen. Was die Elektronik angeht, ich arbeite damit schon seit meiner Kindheit, eher als Hobby und habe schon einige erfahrungen damit. Dieses Projekt und desen Elektronik habe ich komplett selbst gebaut. https://www.youtube.com/watch?v=zQuFAKPzurg Albert M. schrieb: > Kannst Du auf Microkontrollern Rampen, Beschleunigungen usw > programmieren und zwar so, das sich alle Achsen gleichzeitig nach > Vorgaben bewegen? Das impliziert natürlich auch das dazu notwendige > mathematische Wissen. Dies kann ich ganz klar mit NEIN beantworten, was mich aber noch nie davon abgehalten hat etwas zu probieren und bis jetzt war jedes meiner Projekte ein Erfolg.In diesem Bereich bin ich natürlich sehr auf Unterstützung angewiesen. LG,Frank
Angehängte Dateien:
-

nettes_Portait.jpg
5,3 KB

Das Foto von dem verstaubten Notebook fand meine Freundin gut: "So schlimm sieht Dein Schreibtisch dann vergleichsweise doch nicht aus." Und dann hat sie da noch was entdeckt ... Sorry wegen OT.
Frank Schulze schrieb: > Dank Deiner Software funktioniert meine CNC Fräsmaschine Perfekt und ich > kann alle für den Roboter notwendigen Teile Fertigen. Freut mich sehr, dass Dir meine Software nützlich ist. Frank Schulze schrieb: > Lager,Servos und Controller sind bestellt und dürften in > den nächsten Tagen eintreffen In Hinblick auf die Mechanik (Video) scheinst Du ja fit zu sein. Was für Servos und Controller hast Du bestellt? Ich geh jetzt mal davon aus, dass es irgendwelche Industrie-Servos und keine Bastler-Servos sind. Womit stellst Du die Servo-Position fest? Was die Software angeht, die Du ja nach eigenen Aussagen immer aus irgendwelchen Code-Schnipseln zusammen gestrickt hast, würde ich dieses Projekt jetzt mal zum Anlass nehmen die Software von Anfang an selber zu erstellen, egal in welcher Programmiersprache. Für die Programmierung Deines Arduino nimm C wenn Du das kannst, ansonsten Bascom oder Luna. Ich selber stehe mit C auf Kriegsfuss und programmiere alle meine MC's mit LunaAVR. Eine Alternative für das Projekt wären Schrittmotore gewesen. Für die 5 Achsen hätte ich dann 2 ATMega 328 mit darauf geflaschtem GRBL genommen (oder alternativ 2 Arduino Boards) und einen Arduino mit mehreren seriellen Schnittstellen (z.B. Mega) als Main-Controller für die beiden ATMega328. Damit hättest Du Dir über Rampen- und Beschleunigungs-Programmierung keine Gedanken mehr machen und "nur noch" generelle Kinematik für das Zusammenspiel der Achsen mathematisch umsetzen müssen. Den beiden ATMega328 bräuchtest Du dann nur einfachste G-Code Befehle als String über die UART's vom Main-Controller schicken. Aber egal, jetzt hast Du ja die Servos bestellt und es mag ja sein, dass das für den Arm die bessere Lösung ist.
Frank Schulze schrieb: > Albert M. schrieb: >> Kannst Du auf Microkontrollern Rampen, Beschleunigungen usw >> programmieren und zwar so, das sich alle Achsen gleichzeitig nach >> Vorgaben bewegen? Das impliziert natürlich auch das dazu notwendige >> mathematische Wissen. > > Dies kann ich ganz klar mit NEIN beantworten, was mich aber noch nie > davon abgehalten hat etwas zu probieren und bis jetzt war jedes meiner > Projekte ein Erfolg.In diesem Bereich bin ich natürlich sehr auf > Unterstützung angewiesen. Es gibt doch eine ganze Reihe RepRap-Firmwaren, die das halbwegs können. Die juckt es nicht, dass die Achsen nicht linear sind und nicht rechtwinklig zueinander stehen. Ein Gelenk ist eine Achse.
Moin, Torsten C. schrieb: > Das Foto von dem verstaubten Notebook fand meine Freundin gut Den hatte ich bis Freitag im Urlaub mit um den Roboter zu konstruieren.Solltest mal den an der Fräsmaschine sehen^^ Albert M. schrieb: > Was für > Servos und Controller hast Du bestellt? Ich geh jetzt mal davon aus, > dass es irgendwelche Industrie-Servos und keine Bastler-Servos sind. Ich habe leider nicht viel Geld für meine Projekte zur verfügung, deswegen muss alles ein wenig günstiger sein. Servo mit Metallgetriebe: http://www.ebay.de/itm/CARSON-CS-20-SERVO-20-KG-MG-2-TAKT-GROsMODELL-BENZINER-LENK-BREMS-SERVO-/351377156390?pt=LH_DefaultDomain_77&hash=item51cfb5e926 Controller: http://www.ebay.de/itm/221210591650?_trksid=p2060353.m2749.l2649&ssPageName=STRK%3AMEBIDX%3AIT Albert M. schrieb: > Womit stellst Du die Servo-Position fest? Das sollte mit diesen Servos kein Problem sein, die wissen eigentlich immer wo sie gerade stehen.Um beim Einschalten eine hastige Verfahrbewegung zu vermeiden sollte der Arm immer in Neutralstellung/Savepos geparkt werden. Albert M. schrieb: > Was die Software angeht, die Du ja nach eigenen Aussagen immer aus > irgendwelchen Code-Schnipseln zusammen gestrickt hast, würde ich dieses > Projekt jetzt mal zum Anlass nehmen die Software von Anfang an selber zu > erstellen, egal in welcher Programmiersprache. Ich werde mir erstmal eine Firmware suchen mit der ich mal probieren kann und danach wäre dies tatsächlich eine Option. Allerdings leide ich ein weinig unter einer sogenannten Lernschwäche. Ich lerne mit den Augen und durch testen.Lesen und umsetzen ist bei mir Horror. Albert M. schrieb: > Eine Alternative für das Projekt wären Schrittmotore gewesen. So hatte ich das eigentlich von Anfang an auch vor. Ich wollte diese Servo-variante überhaupt nicht, aber ich fand da keinerlei Hilfe und entschied mich dann für den ersten Roboter Servos zu nehmen. Markus H. schrieb: > Es gibt doch eine ganze Reihe RepRap-Firmwaren, die das halbwegs können. > Die juckt es nicht, dass die Achsen nicht linear sind und nicht > rechtwinklig zueinander stehen. Ein Gelenk ist eine Achse. Mal schauen was sich anbietet wenn der Arm fertig ist. Wichtig ist natürlich auch die Software um den Arm dann zu teachen. LG,Frank
Frank Schulze schrieb: > Dies kann ich ganz klar mit NEIN beantworten, was mich aber noch nie > davon abgehalten hat etwas zu probieren und bis jetzt war jedes meiner > Projekte ein Erfolg.In diesem Bereich bin ich natürlich sehr auf > Unterstützung angewiesen. Ich finde es immer wieder schockierend, wie demotivierend die Leute hier in dem Forum sein können ... Mir geht es wie dir ... Ständig wollen mir Leute einreden, was ich kann und was ich nicht kann und es hat sich schon zu einem Sport entwickelt, diesen Leuten zu sagen, was sie für Idioten sind, weil sie mir etwas nicht zugetraut haben ... Gibt halt klügere und weniger kluge Menschen auf dieser Welt ;)
Aeh.. Servos. Da sollte man vielleicht mal die Aufloesung messen, und verifizieren, dass man diese auch erreicht. Ich hatte auch mal so ein Projekt. Wir verwendeten Modellbau Servos, da guenstig. Die Pulsbreite war irgendwas zwischen 0.8 und 2.2ms. Ich konnte hardwarebedingt auf 100ns aufloesen, konnte also 10000 Schritte pro millisekunde. Die Aufloesung haben wir vermessen, indem wir einen Spiegel an die Achse klebten und mit einem Laserpointer drauf schienen. Die Reflexion an der Wand in 5m Entfernung bildete dann die Positionen ab. Reproduzierbar waren die angefahrenen Punkte, aber in 2 Grad gerastert. Heisst die Aufloesung war 2 Grad, egal wie fein mal ansteuerte.
Ich denke es wird schwer eine halbwegs fertige Firmware für einen Gelenkarmroboter zu finden. Die fertigen Systeme wie Ramps sind halt aus dem 3D Drucker und selbstbau CNC Fräsen Boom enstanden. Die unterstützten Roboterarten(Gantry, Scara, Delta) zielen da alle in diese Richtung. Ein Gelenkarmroboter ist privat, ausser zu Spielereien, aber kaum einetzbar. Darum hat sich wohl noch keiner die Mühe gemacht die dazu noch recht komplexe Kinematic in eine Ramps Firmware einzubauen. An deiner Stelle hätte ich da lieber nen Scara oder Delta Roboter gebaut, die sind technisch auch echt interessant und die Marlin Firmware kann das wohl.
Tek schrieb: > Darum hat sich wohl noch keiner die Mühe gemacht die > dazu noch recht komplexe Kinematic in eine Ramps Firmware einzubauen. Das geht auch gar nicht. Die Umrechnung von karthesischen Koordinaten in Motor-Koordinaten gelingt bei den 3D-Druckern nur, weil jeder Position im Raum eindeutig 3 Motorstellungen zugeordnet werden können. Die Umrechnung ist je nach Kinematik mal einfach, mal relativ aufwändig: https://github.com/Traumflug/Teacup_Firmware/blob/delta/dda_kinematics.c Ein Roboter hat aber meist mehr als 3 Achsen, deswegen gibt es keine solche eindeutige Zuordnung. Eine bestimmte Position kann mit mehreren verschiedenen Motorstellungen erreicht werden. Lösen lässt sich das recht steuerungstechnisch einfach: man erstellt nicht Koordinaten für die Raumposition, sondern Koordinaten für die einzelnen Motoren. Der Aufwand für die Erstellung ist dann natürlich deutlich höher, auch, weil der Benutzer einige Dinge selbst entscheiden muss. Mit Delta-Druckern könnte man das auch machen, das würde eine Menge Rechenaufwand im Controller sparen. Allerdings müsste man dafür die Bewegungen in sehr viele kleine Segmente zerlegen, denn bei 3D-Druckern muss ja die ganze Bahn, nicht nur der Endpunkt präzise sein. Das würde dann die Datenübertragung vom Host zum Controller an die Grenzen bringen. Und inzwischen gibt es auch 32-bit Controller, die diesen erhöhten Rechenaufwand für Deltas Rechenaufwand recht gut stemmen. Die RepRap-Firmwaren (Marlin, Teacup, etc.) können das also ... wenn man Schrittmotoren verwendet. Mit Servos für die Kinematik können sie nicht umgehen.
Markus H. schrieb: > Der Aufwand für die Erstellung ist dann natürlich > deutlich höher, Wenn ich mich richtig erinnere drückt man den Arm einfach von Hand durch die gewünschten Bewegungen und die Winkel-Encoder nehmen die Bewegungen auf. Dazu darf natürlich kein dickes Getriebe vor dem Motor sein, sonst lässt sich der Arm zu schwer oder gar nicht von Hand bewegen. usw...
Torsten C. schrieb: > Wenn ich mich richtig erinnere drückt man den Arm einfach von Hand durch > die gewünschten Bewegungen und die Winkel-Encoder nehmen die Bewegungen > auf. Wenn der Roboter lernen kann, dann ja, dann ist das eine Möglichkeit. Ich dachte erst mal an eine Erstellung von Bewegungsprogrammen direkt am PC.
Angehängte Dateien:
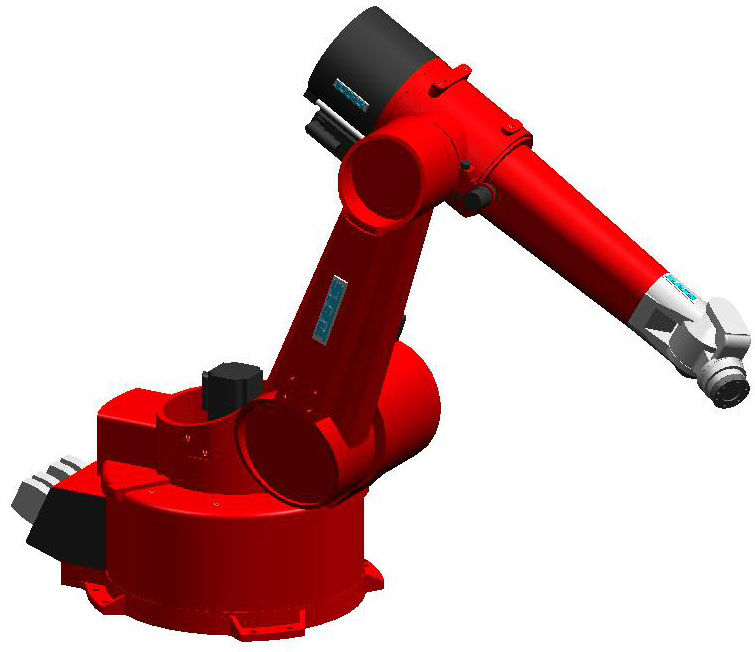
Das Bild im Anhang zeigt den Roboter mit dem ich damals Beruflich viel zu tun hatte. Für das Anfahren von Positionen hatten wir 2 Möglichkeiten. 1. Hand-Achs: Man konnte jede achse separat in ihrem Raum Bewegen um eine Position anzufahren.Hatte man alle 6 Achsen Auf eine Position ausgerichtet konnte man mit... 2. Kartesisch mit X/Y/Z im Koordinatensystem verfahren und alle Achsen richteten sich selbstständig ein. http://de.wikipedia.org/wiki/Industrieroboter#Raumbezogene_Roboterkoordinatensysteme Mir würde es vollkommen Ausreichen, wenn ich Positionen "teachen/abspeichern" kann und diese dann in einem Programm ablauf nacheinander durchlaufen. Wichtig wären auch haltepunkte, auf dem der Roboter auf eine Freigabe zur weiterfahrt wartet. LG,
Hallo Frank Ich habe es oben schon mal geschrieben https://www.pololu.com/docs/0j40/3.b Der code ist verfügbar und zum lernen sollte das ein Anfang sein. Stellst du deine Zeichnungen zur Verfügung Gruss und Danke Bernd
Suchender schrieb: > Der code ist verfügbar und zum lernen sollte das ein Anfang sein. Oh Nein, Linux... Irgendwie werd ich damit nicht warm. Das habe ich seit meiner CNC Fräse begraben. Ich habe auch schon diverse Sachen gefunden, beschäftige mich aber erst nach dem Aufbau damit. http://www.kasperkamperman.com/blog/arduino/arduino-flash-communication-as3/ http://www.google.de/imgres?imgurl=http%3A%2F%2Fwww.seattlerobotics.org%2Fencoder%2F200106%2Fpic4.jpg&imgrefurl=http%3A%2F%2Fwww.seattlerobotics.org%2Fencoder%2F200106%2F16csscnt.htm&h=448&w=593&tbnid=_SQTv39-bZ_9eM%3A&zoom=1&docid=RIv7mwuufRDIrM&ei=3CY3VaDvNYvgapXKgbgP&tbm=isch&iact=rc&uact=3&dur=1653&page=5&start=115&ndsp=32&ved=0CHsQrQMwJzhk Ich suche noch nach einer Software für Windows. Für die meisten muss man bezahlen, damit hätte ich nicht unbedingt ein Problem aber ich würde vorher schon gern wissen ob sie auch was taugt. Suchender schrieb: > Stellst du deine Zeichnungen zur Verfügung Im Moment baue ich noch an dem Prototyp.
Suchender schrieb: > Hallo Frank > > Die Software ist für Windows und Linux > > https://www.pololu.com/docs/0j40/3.a > > Gruss Bernd Habe die Software geladen und installiert. Sieht erstmal ganz gut aus. Morgen dürfte das Board da sein. Werde das mal testen. Leider versucht mich der Händler mit den Servos gerade ein wenig zu verarschen. Habe irgendwie das Gefühl das er die auch erst bestellen muss. Soviel zum Thema Modellbau Schnellversand!
Frank Schulze schrieb: > Ich suche noch nach einer Software für Windows. Für die meisten muss man > bezahlen Wenn man auf biegen und brechen um die Errungenschaften von Open Source herum kommen will, ist das die richtige Strategie. Weiter kommt man damit kaum. Der Controller muss mehr oder weniger selbstständig und in Echtzeit arbeiten können, z.B. wenn die Kommunikation zum Host gerade mal Schluckauf hat.
Angehängte Dateien:
-

IMAG0468.JPG
270 KB -

IMAG0469.JPG
350 KB -

IMAG0470.JPG
360 KB -

IMAG0471.JPG
340 KB -

IMAG0472.JPG
330 KB -

IMAG0473.JPG
220 KB
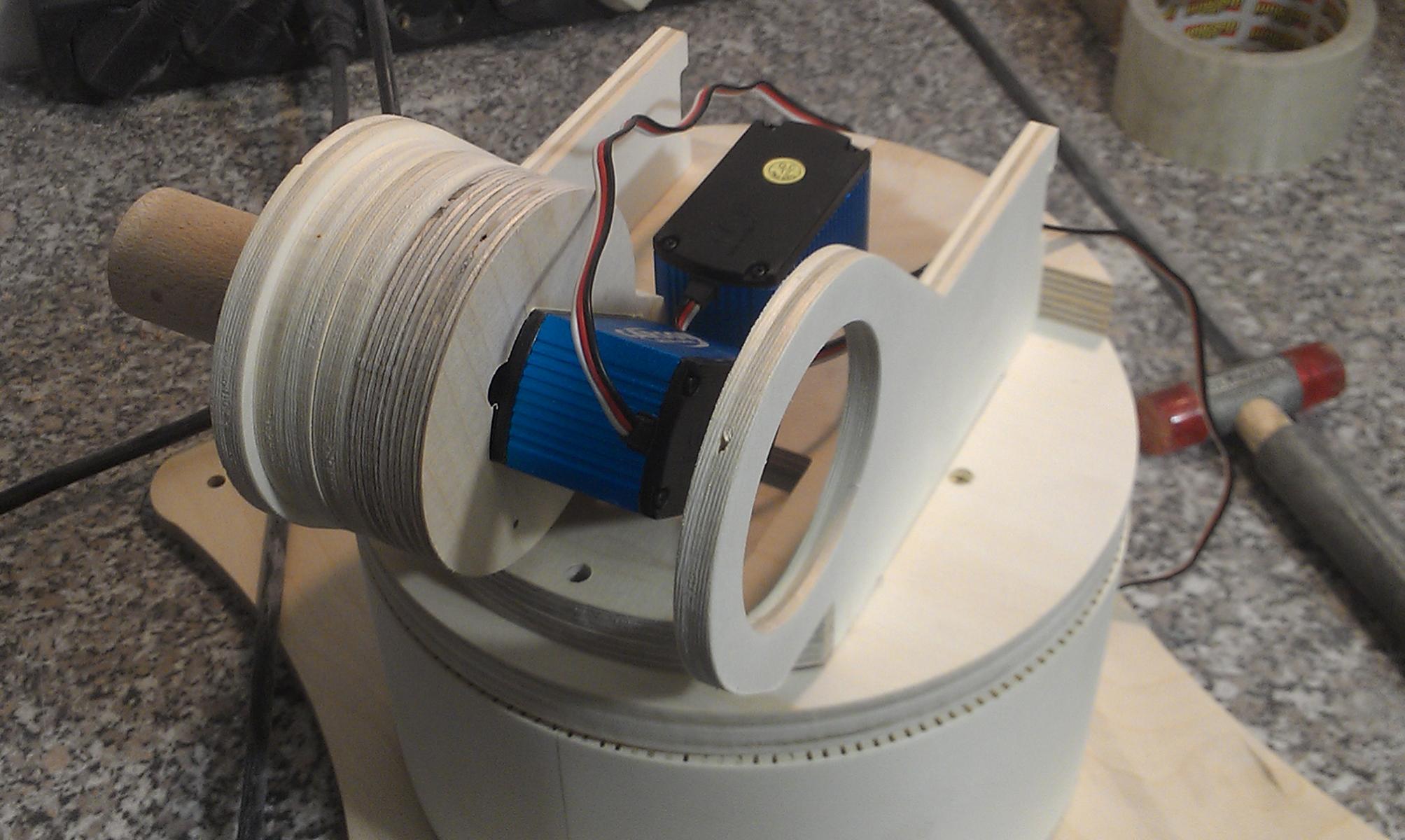
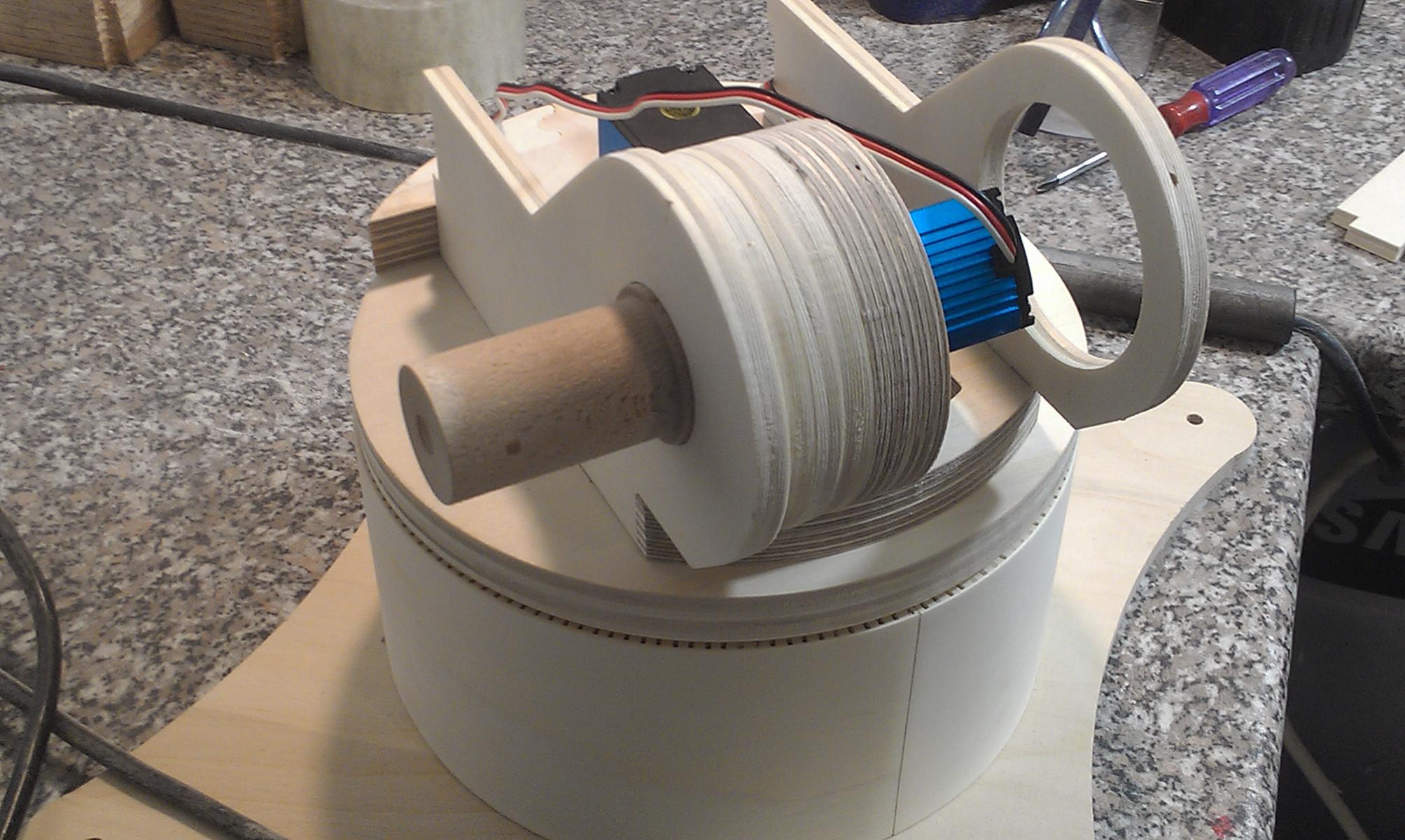



Hier mal kurz ein kleiner zwischenstand über den derzeitigen Status. Mit meiner Rc Fernbedienung kann dich zwar die Arme teilweise testen, nur würde ich dies gern über das Sainsmart Uno tun. Wie schon mal erwähnt, habe ich da zu wenig Ahnung. Kennt jemand eine Firmware für das UNO mit der Ich die Servos über eine Software wie zum Beispiel SSC-32 Servo Sequencer Utility oder LynxTerm ansteuern kann? LG,Frank
Angehängte Dateien:
-

IMAG0474.jpg
230 KB -

IMAG0475.JPG
300 KB -

IMAG0476.JPG
320 KB

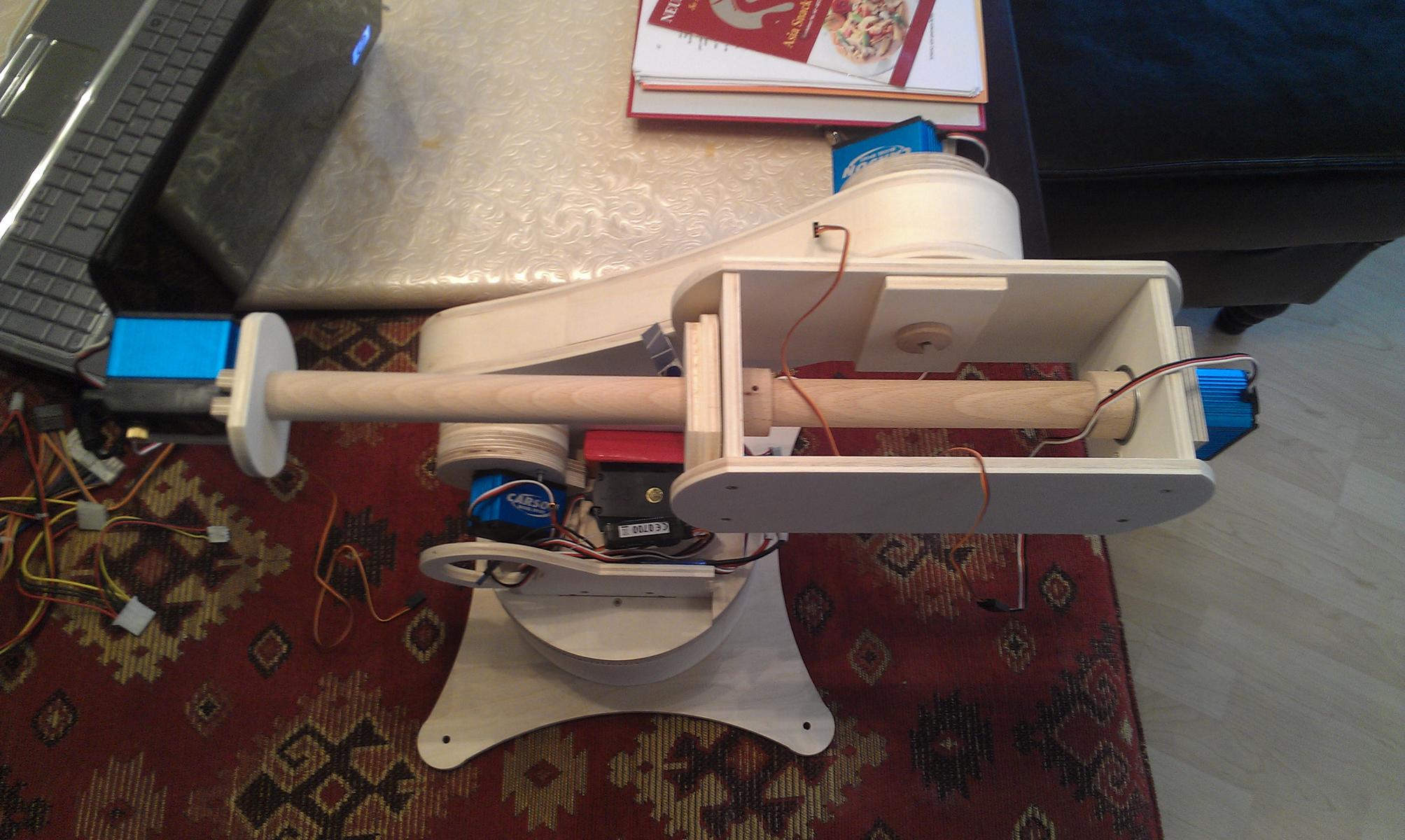

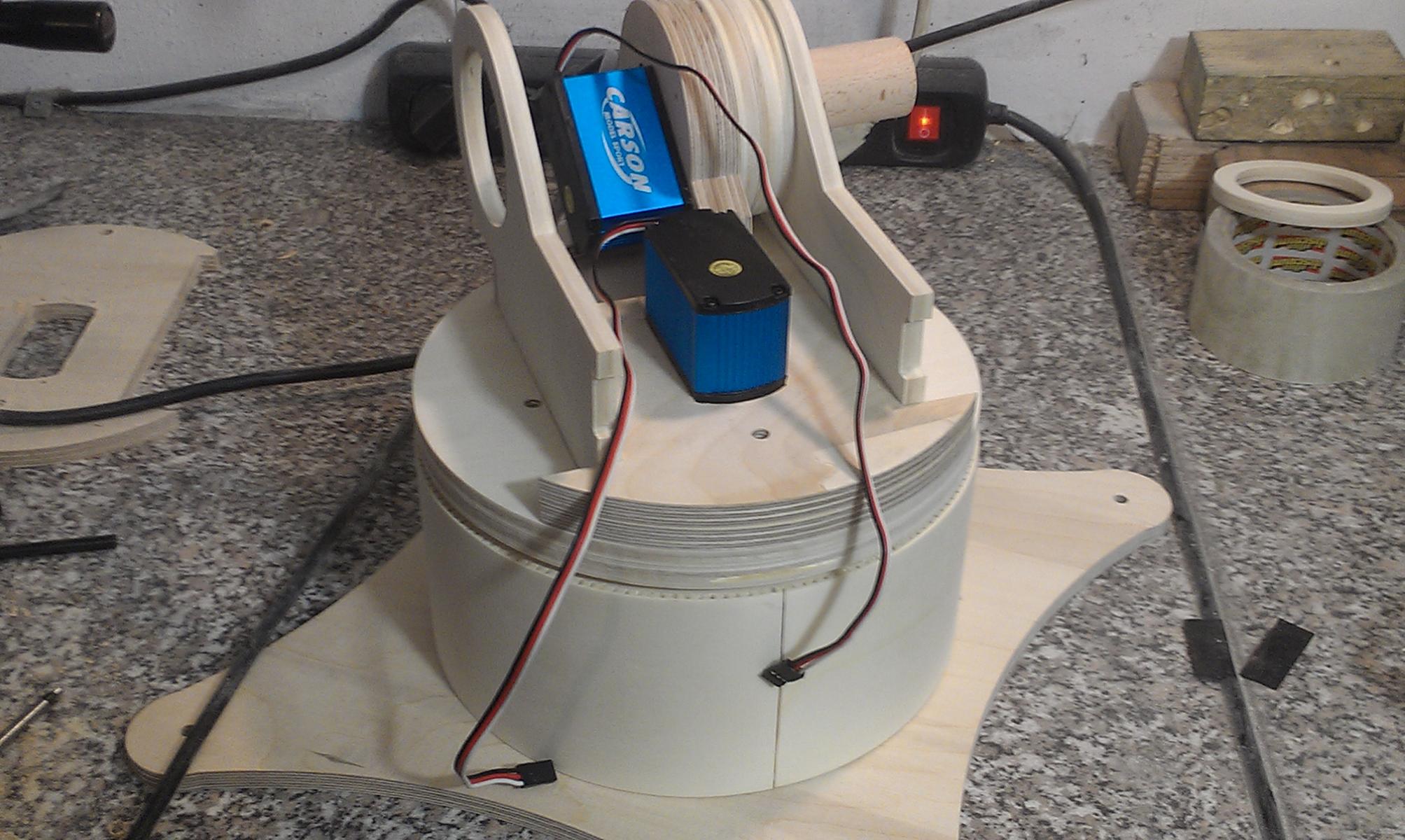
hier mal wieder der aktuelle Stand. Ich habe leider immer noch keine Möglichkeit gefunden die Servos über das Sainsmart uno mit dem PC zu steuern. Suchender schrieb: > https://www.pololu.com/docs/0j40/3.b > > Der code ist verfügbar und zum lernen sollte das ein Anfang sein. Dieses Program scheint nicht für das Uno gemacht zu sein.
und wie wärs mal mit Google? Auf Anhieb findest man z.B. das: http://playground.arduino.cc/ComponentLib/servo Einfaches gehts wohl nicht.
Schöner Titel, hoffentlich hast du Ahnung von Manipulatorkinematik und Dynamik siehe: Denavit Hartenberg. Sonst wirds schwierig sowas zu steuern regeln
Ich suche eigentlich eher was in der Richtung von SSC-32 Servo Sequencer Utility oder Ardugate. Ardugate konnte ich leider nicht installieren/Starten.Bekomme da immer eine Fehlermeldung.
Frank Schulze schrieb: > Ardugate konnte ich leider nicht installieren/Starten.Bekomme da immer > eine Fehlermeldung. Du wirst in Deinem Leben noch oefter "Fehlermeldungen" erhalten. Gruss Asko.
Asko B. schrieb: > Du wirst in Deinem Leben noch oefter "Fehlermeldungen" erhalten. Danke für diesen Wertvollen Tip. Ich war schon am verzweifeln, aber nun gehts wieder voran. LG,Frank
Frank Schulze schrieb: > Danke für diesen Wertvollen Tip. Du hast den Wink mit dem Zaunpfahl offenbar nicht ganz verstanden: WELCHE Fehlermeldung bekommst du? WAS wird da WO angezeigt?
Hallo, Sobald ich ardugate Starte kommt erst ein Fenster ob ich den zugriff zulassen möchte. Schon wärend dieses fenster erscheint kommt im hintergrund ein weiteres Fenster mit der Meldung forbidden error 403. Ich habe alles mögliche versucht. Auch weitere downlaods ev anderer anbieter brachten das gleiche ergebniss Lg Frank
Die gefraesten Holzteile sind richtig schoen. Gab es einen Grund auf jeweilige Gegengewichte zu verzichten ? So wie der Aufbau jetzt ist, muessen die Servos ordentlich Drehmomoent geben, nur um die Position zu halten. Mit Gegengewichten waere das im statischen Fall zumindest vermieden.
Jetzt Nicht schrieb: > Die gefraesten Holzteile sind richtig schoen. Gab es einen Grund > auf jeweilige Gegengewichte zu verzichten ? So wie der Aufbau jetzt ist, > muessen die Servos ordentlich Drehmomoent geben, nur um die Position zu > halten. Mit Gegengewichten waere das im statischen Fall zumindest > vermieden. Danke für das positive feedback. Sobald ich den Roboter komplett habe, werde ich die achsen ausbalancieren. Die Arme sind innen hohl und ich kann dort gewichte anbringen. Dies betrifft eh nur zwei achsen. Die kabel für die Servos werden auch innen liegen und durch die jeweiligen wellen geleitet. LG,Frank
Das Gegengewicht sollte auf der zum Arm anderen Seite der Achse angebracht sein, sodass es kein Drehmoment zum Halten des Winkels braucht.. Und wenn da kein Platz dafuer vorgesehen ist, ist keiner da.
Das hab ich auch so verstanden. Ich habe da genug platz. Das Gewicht vom mittelpunkt der achse y1 bis arm-ende werde ich in der gegenseite (halbschale achse y1) anbringen. Da drin ist noch genug platz.
Es ist aber schon klar, dass das Gegengewicht in kg je hoeher sein muss, je geringer der Radius sein muss. Dh eine kompakte Bauart macht das Ganze schwerer.
Hey, So hat jetzt etwas länger gedauert, du hast mich ja gefragt ob ich dir hier helfen kann. Klar und gerne. Hab mir die Bilder mal genauer angeschaut. Das ding ist ja riesig. Aber wirklich gut und schön gearbeitet. So jetzt zum Thema. Schreib mal bitte was für Servos du verwendest, wie viel grad sie anfahren können (ich denk mal 0° - 180° und zeichne bitte mal auf wie die arme stehen wenn die Servos auf mittel Position stehen also 90°. Die schwenk Richtungen der Arme wäre auch noch wichtig. Wird der Arm mit Sensoren bestückt usw? Würde dir auch eine GUI schreiben in Processing für die Graphische Darstellung des Roboters. Wenn du das willst. Greetz Benny
die baby motoren sind süß scheinen leider nix zu taugen
Benjamin Mo schrieb: > Schreib mal bitte was für Servos du verwendest, wie > viel grad sie anfahren können (ich denk mal 0° - 180° und zeichne bitte > mal auf wie die arme stehen wenn die Servos auf mittel Position stehen > also 90°. > Die schwenk Richtungen der Arme wäre auch noch wichtig. > Wird der Arm mit Sensoren bestückt usw? Hab Dir ne PN geschrieben
Stm Mc schrieb: > die baby motoren sind süß scheinen leider nix zu taugen Bei richtig ausbalancierten Armen werden sie Servos nur ca. ein drittel des eigentlichen Gewichts bewegen müssen. Sollte bei 20Kg Servos kein Problem sein. Lediglich sollten Die H-Brücken gekühlt oder wenn es hart auf hart kommt durch andere ersetzt oder nachgeschalten werden. Hab mir zwischenzeitlich den zweiten Hexapod gebaut mit ca. 10Kg da habe ich die bisherigen H-Brücken durch Stabilere nachgeschaltet. Ohne Servozittern oder sonstigen Problemen.
Was mich interessiert, waere die Bewegungsaufloesung. Wie fein sind die einzelnen Schritte? Und die Reproduzierbarkeit. Also von Punkt A nach Punkt B fahren und wieder zurueck nach A'. Wie weit sind A und A' voneinander entfernt?
Hallo, Jetzt Nicht schrieb: > Was mich interessiert, waere die Bewegungsaufloesung. Dazu kann ich im Moment noch nichts sagen.Sobald ich den Aufbau fertig habe und den Arm Steuern kann werde ich dies auf jeden Fall testen. LG,Frank
Jop, hab ich bekommen. Setzt mich am we hin und schreib dir mal das wesentliche.
Wie hoch ist denn die gerechnete Ausloesung ?
Siebzehn Für Fuenfzehn schrieb: > Wie hoch ist denn die gerechnete Ausloesung ? Kommt drauf an mit wievielen schritten der Servo rechnet (1024, 512, 256). Bei 0 bis 180 grad und der variablen (jeder servo rechnet hier gleich) 0 - 1024 hat man bei 0cm und 180grad eine auflösung von 1024 zu 1. Jetzt sind noch die länge des jeweiligen arms und die schritte des Servos entscheidend (winkelfunktion berechnen) ausgangspunkt ist sinus a 180grad Seiten b und c sind die länge des arms vom drehpunkt aus gemessen. Seite a ergibt sich aus sinus a = 180grad. Ergebniss durch die schritte des servos teilen (1024 oder 512 oder 256) und fertig.
Angehängte Dateien:
-

IMAG0504.JPG
310 KB -

IMAG0505.JPG
320 KB -

IMAG0506.JPG
300 KB -

IMAG0507.JPG
360 KB -

IMAG0508.JPG
290 KB





Hallo zusammen, für die, die es interessiert...hier ist der Aktuelle Fertigungsstand. Es fehlt nur noch der Schaltkasten, die Drehscheibe für die Achse6 und die Lackierung. Das sollte bis zum nächsten wn kein Problem sein. Dann geht es an die Steuerung. Die Achsen, so wie sie auf dem Bild stehen, halten Stromlos selbstständig. Die Servos benötigen keinen großen Kraftwaufwand für die Bewegungen. LG,Frank
Hey Frank, Hab mit den beiden sw teilen angefangen. Sowohl arduino als auch Processing. Hatte leider nicht viel Zeit am We, aber am Dinstag, spätestens Mittwoch lade ich die funktionsfähige Version hoch. Gruß Benny
Benjamin Mo schrieb: > Hab mit den beiden sw teilen angefangen Freu mich schon riesig drauf... LG,Frank
habe nie gedacht, dass das soweit kommen wird trotz aller Demütigung. chapeau! Sie haben großes vor, wenn Sie ein bisschen Manipulator, Mehrgrößensysteme und Regelungstechnik sowie µControllerprogrammierung lernen würden. ;)
Also ich habe den Thread hier mal ein bißchen überflogen. Das Video mit der Stanzpresse fand ich gut, allerdings hätte der Text etwas länger sichtbar sein können. Von mir kann ich sagen, daß ich so eine Mechanik wohl eher nicht hinbekommen würde! Ich hoffe du machst dann noch ein Video von Deinem fertigen Roboterarm ?
Vielen Dank, Mit mechanischen und elektronischen Sachen tue ich mich sehr leicht. Was das Programmieren angeht, da müsste ich mich komplett einarbeiten und aufgrund meines ( "ads" ) tue ich mich sehr schwer damit. Ich lerne viel mit den Augen und durch ausprobieren. Das bleibt auch für immer hängen. Allerdings habe ich mir auch schon überlegt, wenn der Robot Arm mal läuft, mich mit der Materie zu beschäftigen. Ich werde auf jeden Fall auch zu diesem Projekt ein Video erstellen. Zu meiner Fräsmaschine fehlt das Video auch noch. LG,Frank
Hallo zusammen, Nachdem ich nun verschiedene Programme getestet habe, Leider ohne Erfolg, suche ich immer noch eine Möglichkeit den Roboter auf bestimmte Positionen zu fahren und diese einzulernen /teachen. Mir ist es dabei nicht wichtig geradlinige bewegungen aller Achsen zu fahren. Wenn ich angefahrene Positionen speichern kann und diese in einem Ablauf wiederholen kann bin ich erstmal vollkommen zufrieden. Das SainSmartUno wurde verstärkt, sodas alle Servos direkt aufgesetzt werden können. LG,Frank
Hey, Beide progs sind fertig. Hab alerdings im Arduino sketch noch einen bug, den werde ich heute abend ausmerzen und dir die beiden Sw teile erstmal per pn schicken, da ich sicher gehen will das alles so läuft wie es soll. Das problem ist noch wenn der pc abgestöpselt wird, fährt der controller die Servopossitionen nicht mehr in schritten sondern mit vollgas an. Wird bis heute Abend behoben sein. Sorry hat etwas länger gedauert.
Freu mich von Dir zu hören... habe den Robo am Freitag zerlegt und lackiert. Entweder baue ich ihn heute Abend noch zusammen oder morgen. Habe die Servos aber alle da liegen und kann ja schonmal testen. LG,Frank
Hallo Frank, Da die wie gesagt di Datei für eine Mail zu groß ist lade ich sie hier hoch. Die erste Version ist PW geschützt, Hab dir das PW per PN geschickt. Wenn Frank sein okay gibt das alles soweit funktioniert, werde ich auf dieser Version aufbauen und sie auch nicht mehr PW sichern. Greetz Benny
> Da die wie gesagt di Datei
Sorry Deutsch war alle.
Da wie gesagt die Datei
Angehängte Dateien:
-

IMAG0572.JPG
380 KB -

IMAG0579.JPG
500 KB -

IMAG0581.JPG
450 KB -

IMAG0575.JPG
370 KB -

IMAG0583.JPG
350 KB





{kind=link}
Hier ist der momentane Fertigungs-stand. Der Roboter ist Komplett Lackiert. Es fehlt nur noch die Elektronik-Box. LG,Frank
Herzlichen glückwunsch zu dem Projekt und das du es durchgezogen hast. Somit hast du den besserwissern mal die lang enase gezeigt zu recht. Das du dich mit dem Arduino so sehr beschäftigthast gefäält mir nochmehr. Da fehlt mir vollkommen die kenntniss. Wenn dein Projekt läuft würde ich mich gerne für infoamtionen bei dir hinten anstellen :) wenn ich darf natürlich. Bin auf den Probelauf gespannt. Beste grüße Karl
wenn Sie Kenntnis über Software-Roboter mehr haben möchten, dann müssen Sie am Anfang an HAL (Hardware und Software implementieren) studieren. 1. erste Hardware "Atmega 2560" für 3 Achsen selbst programmieren. dann 5 achsen dann Handroboter.
Dieser Kommentar ist kein bischen Hilfreich. Glaubt er ernsthaft das wir das nicht wissen? Oh man... Finde solche Kommentare einfach nur peinlich. Bin übrigends immernoch auf der Suche nach einer Software mit der ich dem Roboter positionen speichern kann. Und "NEIN" ich habe aus Gründen die ich hier nicht näher aufzeigen möchte, keine Möglichkeit mich mit dem Programmieren zu beschäftigen. LG, Frank Schulze
Interssantes Projekt, leider ja ohne Steuerung ziemlich unbrauchbar. Hast du da schon Fortschritte gemacht? Wie hoch sind eigentlich die reinen Materialkosten für die Mechanik bisher?
Die Materialkosten liegen bei ca. 350 Euro. Das Betrifft die Servos, Kugellager, Steuerung, holz und Farbe. Spiele im Moment mit dem Gedanken das Projekt Komplett mit Cad Daten zu verkaufen. Ernstgemeinte Angebote können mir gern per Pn gesendet werden. Lg, Frank
Hatte mir schon überlegt dir anzubieten, dass wir gemeinsam eine Steuerung für den Roboter entwickeln, aber 350€ sind mir da eindeutig zu viel.
Frank Schulze schrieb: > Bin übrigends immernoch auf der Suche nach einer Software mit der ich > dem Roboter positionen speichern kann. Geht das überhaupt mit den Servos? Haben Servos einen Rückkanal? Mein Vorschlag wäre, du schreibst die für den Arduino ein Programm, mit dem du jeden Servo einzeln manuell ansteuern kannst. Dann fährst du den Roboter manuell in die gewünschte Position, indem du halt jeden Servo so stellst wie du es brauchst und dann schreibst du die die Werte für jeden Servo auf.
my appends 6-axis robotic 3D printer http://www.3ders.org/articles/20150203-students-develop-6-axis-kuka-abs-3d-printing-robot-inspired-by-spiderwebs.html was hat der kuka inside: https://www.youtube.com/watch?v=mADNlV1yCSo ;-)
Sind da Carson 500502034 CS-20 drin? Karl schrieb: > Geht das überhaupt mit den Servos? Haben Servos einen Rückkanal? Ohne Rückkanal (Winkelaufnehmer) kannst Du den Roboter nicht im "Leerlauf" trainieren, aber per Joystick die Bewegungen abfahren und Dir die PWM-Werte merken. Allerdings habe ich zu den Carson CS-20 keine Infos über die Wiederhol-Genauigkeit gefunden. Mit Winkelaufnehmer würde mehr Sinn machen.
Hallo zusammen, .. schrieb: > was hat der kuka inside: > Youtube-Video "Inside a KUKA Robot" Das ist ein nettes video. In dem Roboter stecken sicher 1-2 minuten mehr Entwicklungsarbeit und vieleicht 20- 30 euro mehr an kosten drinnen :) was geht bei deinem Projekt hast ja lange nichts mehr hören lassen. Salu- Karl
Benjamin M. schrieb: > Sorry Deutsch war alle. > > Da wie gesagt die Datei Deutschlehrer bitte anderes Forum Finde das Toll was Frank da baut, und mal ehrlich bin auch auf der Suche nach Hilfe für eine kleine CNC Fräse, Und was lese ich hier im Forum !!!!! Du bist zubl...e zum Gogglen. Wenn man das wäre, käme man nicht auf das Forum hier Grüße
Hallo Benjamin, Wie schaut es mit dem Update für den Roboter aus? Hast da ev nochmal weiter machen können? Was die kleine Fräse angeht...da kann ich Dir helfen. Ich habe meine mit dem Arduino/ atmega 2560 und Ramps 1.4 gebaut. Also alles aus dem Drucker. sie läuft fast täglich und funktioniert prima. LG,Frank
Hallo Frank, Die CAD Daten deines ARM´s sind nicht zufällig irgendwo erhältlich? Würde mir auch gerne so ein ARM Fräsen. lg mathias
Peter X. schrieb: > Frank Schulze schrieb: >> möchte ich nun >> einen 5-6 Achsigen Knickarmroboter auf Basis eines Industrieroboters >> bauen. > Wozu? > >> Leider bin ich auf dem Gebiet der Software eine Niete > Du hast sicherlich noch andere, besser ausgebildete Qualitäten. > Sieh zu, dass du diese verfeinerst. "Wozu?"... Bengel, wozu so eine Gegenfrage? Genau wie der Rest deiner Aussagen hier - Sieh du mal lieber zu, wenn du nichts Nützliches beitragen kannst, den Hals zu zu lassen. Flasche!
Eure Art auf normale Fragen zu antworten ist so dermaßen überheblich das ich es mir nicht nehmen lasse euch mal mitzuteilen wie scheisse ihr seid.
Such doch auch alle anderen alten Threads raus wo du deine/n xxxxxx hinterlassen kannst!
Und dafür hast Du jetzt 3 Jahre Bedenkzeit gebraucht? Da die kompetenten Netten seit Jahren das Weite suchen, bleiben eben die Problemfälle übrig. Aber seh es mal so: Solange die hier sind, haben die weniger Zeit andere Foren zu infizieren ;-) Ein dickes Fell und den Irrsin hier mit Humor zu betrachten hilft.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.