Hallo Leute, vorab: Ist zwar vll. ein mechanisches Problem, aber auch elektrotechnisch, daher in diesem Forum. und zwar habe ich folgende Anwendung: Mittels zwei Elektromagneten halte ich die platte in der Luft bei einem definierten bzw. vorgegebenen Abstand. Siehe Bild. Mittels zwei Sensoren messe ich auch die zwei Abstände, um mittels einer regelung entsprechend einzugreifen. Nun ist es so, dass die regelung total entkoppelt mache, d.h. ich messe mit sensor 1 und sensor 2 die abstände und regele dann beide elektromagneten unabhängig voneinander. Die Regelung klappt auch, nur um das ganze auf Modellebene zu übertragen, muss ich doch auch die kopplung betrachten, d.h. die Kraft F1 hat aber auch einen Einfluss auf den Luftspalt von ELektrmagnet 2 und umgekehrt. Wie kann man das mit berücksichtigen ? Bzw. gibt es suchbegriffe, wonach ich schauen kann ? Bin leider nicht der modelliertexperte...
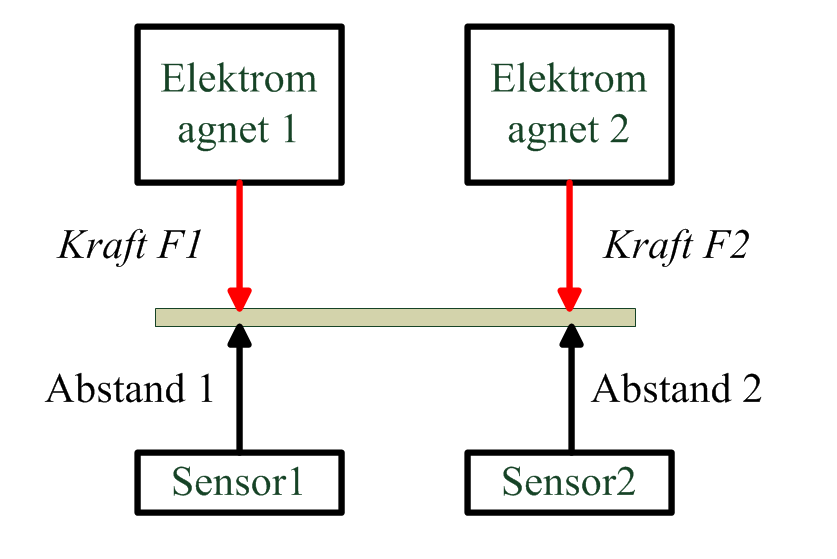
Joachim schrieb: > sorry, das bild natürlich noch. Um es zusammenzufassen: Ich möchte gerne wissen, wie man die Abhängigkeiten von F1 zu Luftspalt von Elektromagnet 2 und von F2 zu Luftspalt von Elektrmagnet 1 modelliert, da beide ja sich ebenfalls beeinflussen.
So mein Gedankengang: Durch anheben um "Wert" auf Seite 1 wird gleichzeitig um "geringer Wert" auf Seite 2 angehoben. Nun ist Seite 2 um "geringer Wert" zu hoch und wird um diesen "geringer Wert" herabgelassen, wodurch nun aber Seite 1 auch um "geringer geringer Wert" herunter geht. Mein Gedankengang sagt, dass das System sich nach kürzester Zeit "einschwingen" und somit in "Ruhe" liegen sollte, wenn man die "Kopplung" nicht beachtet. Besonders da "Wert" auf Seite 1 sich über eine bestimmte Zeit einstellt, in welcher aber bereits auf Seite 2 dem sich über die Zeit einstellenden "geringer Wert" entgegen gewirkt wird. *Kann mich aber natürlich auch komplett irren.
Michael D. schrieb: > Durch anheben um "Wert" auf Seite 1 wird gleichzeitig um "geringer Wert" > auf Seite 2 angehoben. Ich würde eher erwarten, dass sich die Platte um ihren Schwerpunkt bewegt, also dass bei Anhebung der Seite 1 die Seite 2 abwärts bewegt wird, falls diese Änderung relativ schnell erfolgt. Um dieses Verhalten zu kontrollieren, sollte man sein Augenmerk wahrscheinlich auf den D Anteil der beiden PID Regler richten... sonst versucht ein Regelkreis, dem anderen etwas vorzutanzen.
MaWin schrieb: > Joachim schrieb: >> Bzw. gibt es suchbegriffe, wonach ich schauen kann ? > > Earnshaw's Theorem Was hat das damit zu tun ? Das Theorem ist mir bekannt, und hat doch damit leider gar nichts zu tun. Ernst Oellers schrieb: > Ich würde eher erwarten, dass sich die Platte um ihren Schwerpunkt > bewegt, also dass bei Anhebung der Seite 1 die Seite 2 abwärts bewegt > wird, falls diese Änderung relativ schnell erfolgt. Richtig, meine Frage ist halt, wie ich die Gegenseitige Beeinflussung berücksichtigen kann ? D.h. doch eig, dass das Modell mechanisch bzw. über irgendwelche mechanischen Gleichungen gekoppelt ist.
Angehängte Dateien:
-

c.png
77 KB
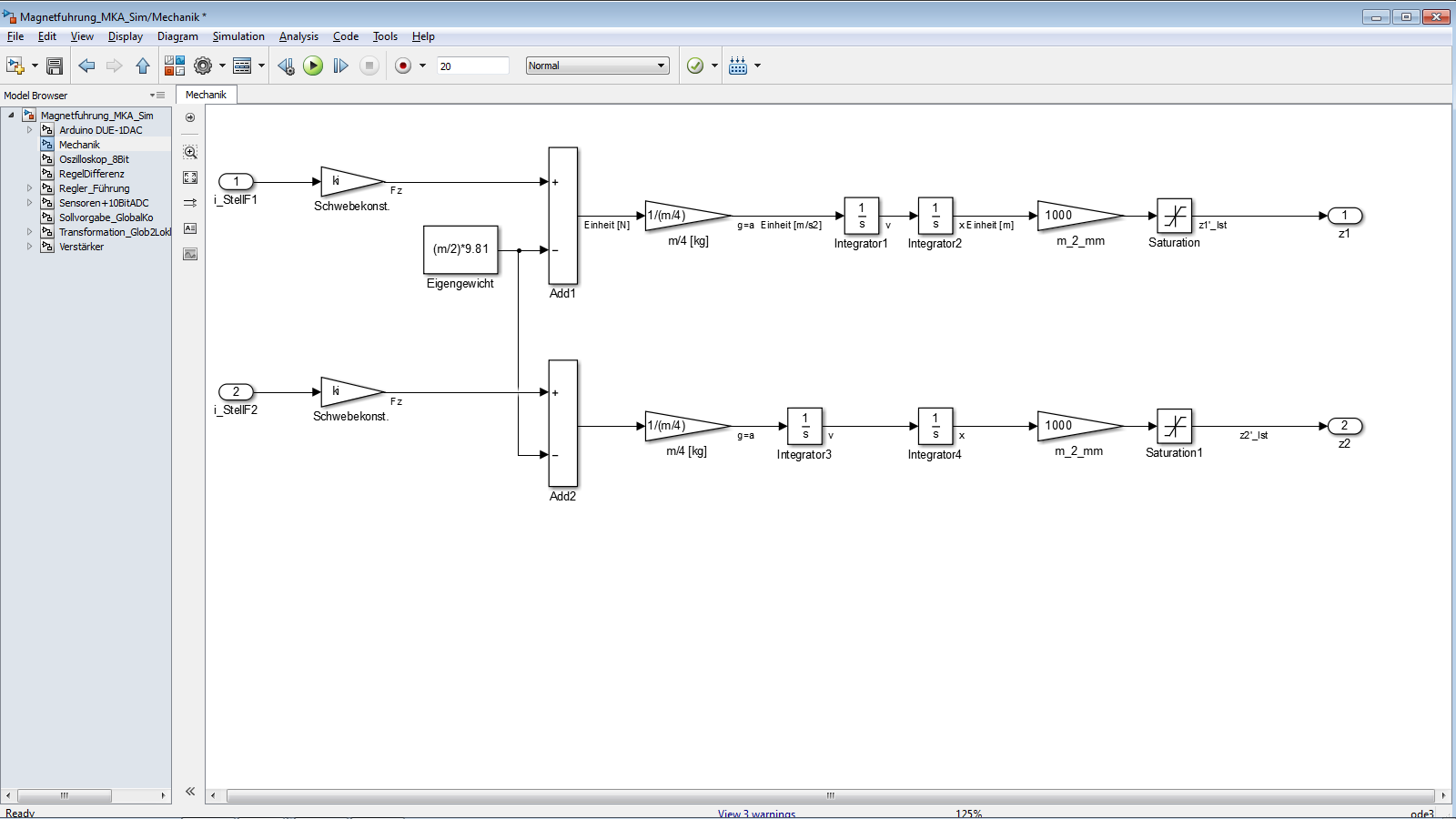
Also noch einmal: Die Regelung funktioniert und das ganze klappt auch super. Nur möchte ich für die Reglerauslegung nun die Strecke simulieren. Derzeit habe ich ein Simulationsmodell, jedoch stimmen die Messergebnisse nicht mit den Simulationen überein. Hier ist mein Simulationsmodell. Wie man sieht, werden beide Strecken unabhängig von einander geregelt. Leider fehlt wohl da noch die Kopplung..
Joachim schrieb: > Die Regelung funktioniert und das ganze klappt auch super. Und wie sieht "das ganze" genau aus?
Mir erschließt sich nicht, warum du hier eine Koppelung herstellen willst. Die Position jeder Seite der Platte wird ja über den (unabhängigen) Sensor erfasst, insofern kann jede Seite genau die Änderung ausgleichen, die durch die andere Seite erfolgt ist. Im Prinzip ist es ja egal, ob die Lageänderung der Platte durch Wind, Gravitationsschwankung, Erschütterung, Anfassen oder eben den anderen Magneten erfolgt. Ich kann mir eher vorstellen, dass sich das ganze System aufschaukeln kann, wenn keine Dämpfung eingebaut wird.
also wenn ich es richtig verstehe hast du ein regler und brauchst jetzt ein mechanisches simulationsmodell von deiner platte? ein ansatz wäre die platte freischneiden, bewegunsgleichungen aufstellen und dann in zustandsraum transformieren. des zustandsraummodell kannst dann einbauen in deine simulation
Joe F. schrieb: > Gravitationsschwankung Ja, die insbesondere. Ist schon enorm, was da in letzter Zeit so für Abweichungen vom Normal passiert sind...;-)
0815 schrieb: > Joe F. schrieb: >> Gravitationsschwankung > > Ja, die insbesondere. Ist schon enorm, was da in letzter Zeit so für > Abweichungen vom Normal passiert sind...;-) Ich konnte es nicht unerwähnt lassen... ;-)
technische mechanik schrieb: > also wenn ich es richtig verstehe hast du ein regler und brauchst jetzt > ein mechanisches simulationsmodell von deiner platte? ein ansatz wäre > die platte freischneiden, bewegunsgleichungen aufstellen und dann in > zustandsraum transformieren. des zustandsraummodell kannst dann einbauen > in deine simulation genau das habe ich vor. aber habe ich denn etwa da die kopplungen drin im Zustandsraum ??
Von der mechanischen Seite her betrachtet, würde ich z.B. ein Brett sehen (nicht magnetisch) und die Hebelwirkung der beiden Punkte gegeneinander nach dem Hebelgestz untersuchen von Fall zu Fall. Wenn F1 keine Kraft hat muß ja F2 bedingt durch die Hebelwirkung eine vielfache Kraft aufbringen um das Brett möglichst in der Waage zu halten. Das könnte man mit 2 Federwaagen bestimmt mal experimentell nachbilden und dabei das Brettgewicht als Gegenkraft mit betrachten.
Also mit meinen Regelparametern kommt es zb in der Simulation zum Überschwingen, während es bei der realen Messung nicht zum Überschwingen kommt. Ansonsten passt das Modell soweit ganz gut. Wie gesagt, meinem Modell "Mechanik" fehlt noch wohl etwas.
Was für Regler hast du denn? PID? hardware oder software? Überschwinger sind oft auf falsch dimensionierte D-Regelanteile zurück zu führen. Ich kann in deinem Modell aber keine D-Regelglieder entdecken.
in dem zustandsraum ist die 'kopplung' drin, ich würd auch erst mal den D-Anteil auf 0 setzen.
Google-Tip zum Aufstellen der Bewegungsgleichung -> Lagrange-Formalismus bzw. hier: http://de.wikipedia.org/wiki/Lagrange-Formalismus
Also entweder wie bereits gesagt den Euler-Lagrange-Formalismus verwenden. Oder das Prinzip der virtuellen Arbeit anwenden. Hier seid zwei Dissertationen, die ganz gut geeignet sind für das Verständnis http://d-nb.info/1053914164/34 http://diglib.uni-magdeburg.de/Dissertationen/2006/olapetzold.pdf Ich hoffe das hilft.
Ernst Oellers schrieb: > Was für Regler hast du denn? PID? hardware oder software? PID Software. Ernst Oellers schrieb: > Überschwinger sind oft auf falsch dimensionierte D-Regelanteile zurück > zu führen. Ich kann in deinem Modell aber keine D-Regelglieder > entdecken. Der Regelkreis ist auch an anderer Stelle aufgebaut. Lediglich die verstärkte Ausgangsgröße des Reglers wirkt dann als Eingangsgröße auf die Mechanik. Ich denke eher, dass ich irgendwo noch dämpfende Faktoren in meinem Mechanik-Modell einbauen sollte. Typ schrieb: > Hier seid zwei Dissertationen, die ganz gut geeignet sind für das > Verständnis Danke ich werde reinschauen.
technische mechanik schrieb: > in dem zustandsraum ist die 'kopplung' drin, ich würd auch erst mal den > D-Anteil auf 0 setzen. also die ganze mechanik einzeln in den zustandsraum transformieren ist kein problem und das bekomme ich auch hin, nur wo ist dann die Kopplung ?
du hast ein körper mit zwei freiheitsgraden, wenn du die newton euler bewegungsgleichungen hast ist die kopplung nachher in der A Matrix bzw B über impuls und drallsatz
tech mech schrieb: > du hast ein körper mit zwei freiheitsgraden, wenn du die newton > euler > bewegungsgleichungen hast ist die kopplung nachher in der A Matrix bzw B > über impuls und drallsatz Ohje, das wird doch dann komplizierter als erwartet...
Joachim schrieb: vorab: Ist zwar vll. ein mechanisches Problem, Heißt "vll.", "völlig" oder "vollbesoffen" oder was gz. anderes?
tech mech schrieb: > du hast ein körper mit zwei freiheitsgraden, wenn du die newton euler > bewegungsgleichungen hast ist die kopplung nachher in der A Matrix bzw B > über impuls und drallsatz gibt es vll. ein Beispiel oder ähnliches für ein System mit bis zu six freiheitsgraden ?
Prinzipiell hast du ein ähnliches Model wie ein zweidimensional betrachteter Quadrocopter (dazu sollte einiges zu finden sein). Ansosnten eventuell noch den Drallsatz betrachten! Darüber erhälst du definitiv eine Kopplung. Durch eine Kraft F1 erhälst du ja nicht nur eine lineare Verschiebung sondern ein Moment, fgl. eine Drehbewegung. MFG
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.