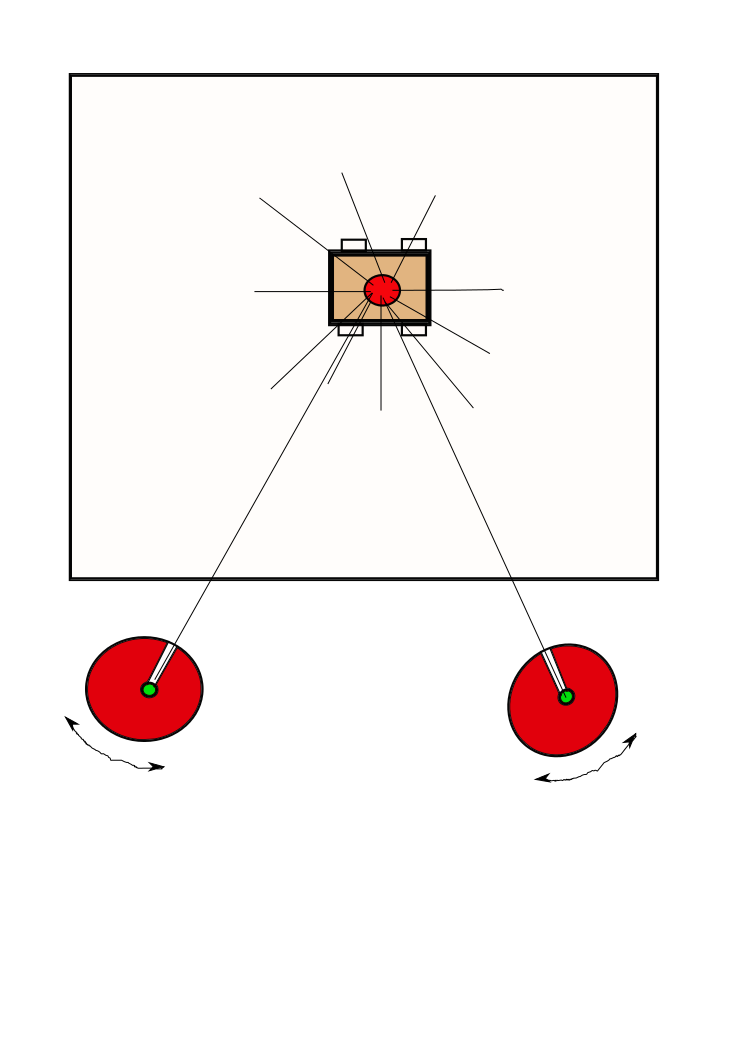
Hallo zusammen, es geht um einen kleinen Roboter (auf Rädern) dessen Position ich gerne per Kreuzpeilung ermitteln möchte. Auf dem "Spielfeld" sind auch Hindernisse aufgebaut, so dass optische Peilung nicht funktioniert. Die Idee ist folgende: Auf dem Roboter sitzt ein Funksender, welcher einfach nur alle 10ms ein Signal sendet. Ein Dauersignal ist ja wohl in Deutschland nicht mehr erlaubt. ZB. ein RFM02, der einfach nur 010101010.... sendet. Am Rande des "Spielfeldes" sitzen zwei Empfänger. Die beiden Empfängerantennen werden abgeschirmt durch zwei darüber gestülpte Dosen. Die Dosen sind über Servos drehbar. Außerdem haben die Dosen ein Loch. Wenn nun das Loch in Richtung Roboter steht, dann wird etwas empfangen. Ich erhoffe mir dadurch eine relativ starke Richtwirkung. Es ist mir klar, dass das erste Suchen des Senders (Roboters) etwas Zeit brauchen wird. Das macht aber nichts aus. Wenn der Roboter dann durch eine erste gültige Kreuzpeilung gefunden wurde, kommt es eben darauf an, wie exakt das mit der Servodreherei ist. Frage 1: ist die Richtwirkung nur durch das Loch stark genug oder muss zB. noch ein Rohr eingelötet werden? Frage 2: Könnte man nicht sogar zwei Empfänger pro Dose verwenden und die Abschirmungen etwas V-förmig gestalten? Dadurch wäre es ähnlich einer Solarpanelnachführung mit zwei LDRs. PS: Es handelt sich um ein Bastelprojekt, der Preis ist also nicht relevant. Zumindest solange es nicht 200 Euros übersteigt.
Angehängte Dateien:
-

Kreuzpeilung.png
45 KB
Dein Hauptproblem wird sein das du die mehrwegeausbreitung nicht bedacht hast. Was passiert z. B. Wenn irgend ein Teil dein funksignal reflektiert und du auf die reflektion ausrichtest. gruss Matthias
Such mal nach "Drehfunkfeuer" - funktioniert seit über 100 Jahren.
Hi, Ulli, > Die Dosen sind über Servos drehbar. Außerdem haben die Dosen ein Loch. Das wirkt dann auch als Schlitzantenne. Die senden nicht nur in die Richtung des Loches, sondern auch rundum. Richtwirkung ergibt sich erst durch Apertur, wenn die Antenne also deutlich breiter ist als eine Wellenlänge. Bei 30cm Wellenlänge wäre sie dazu wohl schnell breiter als das Spielfeld. Deine Idee ist naheliegend, Ulli, aber wenn Du ein Antennenbuch wie den Rothammel konsultiert hast, wirst Du auf machbarere Alternativen kommen. Dann wirst Du auch begründen können, warum es bisher noch keine Lösung dieser Art geben konnte. > Frage 1: ist die Richtwirkung nur durch das Loch stark genug Die Antennen einfachster Schiffsradare sind meterlange Profile für Wellenlängen um 3cm, und viele Schlitze nebeneinander für die Apertur. Ich glaube kaum, dass diese Radargeräte feiner auflösen als 1°. Das lässt sich alles ausrechnen. Die Idee mit dem Loch funktioniert, wenn die Dose aus Blei wäre und der Sender ein radioaktives Isotop. Danke, nein. Alle weiteren Antworten erübrigen sich. Hochfrequenz- und Antennentechnik galten nicht umsonst solange als eine Art von "schwarzer Magie". Ciao Wolfgang Horn
Also mit Intensität wirst Du nicht viel anpeilen können. Mit der Laufzeit funktioniert das deutlich besser und einfacher. Sinnvollerweise macht man so was auch mit Ultraschall, da dafür die Technik noch billiger ist.
Werner schrieb: > Such mal nach "Drehfunkfeuer" - funktioniert seit über 100 Jahren. Habe mir das auf Wikipedia mal durchgelesen. Hast Du Dir das auch mal durchgelesen? Da werden Antennenanlagen mit sehr grossen Durchmessern verwendet. Abgesehen davon, dass ich einen Roboter und keine Boing damit kreuzpeilen möchte, ist der finanzielle Aufwand wohl ein klein wenig höher als 200 Euro. Wolfgang H. schrieb: > Deine Idee ist naheliegend, Ulli, aber wenn Du ein Antennenbuch wie den > Rothammel konsultiert hast, wirst Du auf machbarere Alternativen kommen. Nun, ich möchte mich eigentlich nicht grossartig in die Funktechnik einarbeiten. Am liebsten wäre es mir, wenn ich fertige Funkmodule verwenden könnte. Aber Du sagst, nach Studium des Rothammels würde ich auf machbare Alternativen kommen. Da ich keinen Rothammel Zuhause habe frage ich jetzt hier: Was wären nach Rothammel machbare Alternativen? Christian B. schrieb: > Mit der > Laufzeit funktioniert das deutlich besser und einfacher. Sinnvollerweise > macht man so was auch mit Ultraschall, da dafür die Technik noch > billiger ist. Bekomme ich das mit der Laufzeit auf einen Abstand von 0,5 bis 3 Meter so genau hin? Wie soll das überhaupt gehen mit zwei Empfängern? Ich brauche ja mindestens 3 Empfänger für eine Ortung über die Laufzeit. Ultraschall geht leider nicht, da der Roboter unter anderem durch ein abgedecktes Labyrinth fahren soll. Meine Idee mit dem Funk basiert auch darauf, dass mir die absolute Funkintensität egal ist, ich suche nur nach der maximalen Intensität. Über den Winkel der Dose habe ich dann die Richtung. In der Schule habe ich gelernt, dass man Funkwellen in grober Annäherung auch mit Wasserwellen vergleichen kann. Was wäre denn ein geeigneter Wellenbrecher vor dem Loch in der Dose, damit nur geradlinig eintreffende Funkwellen bis ins Innerste vordringen? mfG Ulli-B
Hi, Ulli, > Wolfgang H. schrieb: >> Deine Idee ist naheliegend, Ulli, aber wenn Du ein Antennenbuch wie den >> Rothammel konsultiert hast, wirst Du auf machbarere Alternativen kommen. > > Nun, ich möchte mich eigentlich nicht grossartig in die Funktechnik > einarbeiten. Am liebsten wäre es mir, wenn ich fertige Funkmodule > verwenden könnte. > Aber Du sagst, nach Studium des Rothammels würde ich auf machbare > Alternativen kommen. Da ich keinen Rothammel Zuhause habe frage ich > jetzt hier: Was wären nach Rothammel machbare Alternativen? Gegen Auftrag und Anzahlung könnte ich Dir schon einen Vorschlag ausarbeiten. Ciao Wolfgang Horn
Wolfgang H. schrieb: > Gegen Auftrag und Anzahlung könnte ich Dir schon einen Vorschlag > ausarbeiten. Tja, Du kennst ja mein Limit: 200 Euro. Ich fürchte jedoch, dass dies nicht einmal als Anzahlung reicht :-( Ulli-B
Ulli B. schrieb: > In der Schule habe ich gelernt, dass man Funkwellen in grober Annäherung > auch mit Wasserwellen vergleichen kann. Was wäre denn ein geeigneter > Wellenbrecher vor dem Loch in der Dose, damit nur geradlinig > eintreffende Funkwellen bis ins Innerste vordringen? Was macht dich glauben, dass das bei Wasserwellen möglich ist?
Konrad S. schrieb: > Ulli B. schrieb: > In der Schule habe ich gelernt, dass man Funkwellen in grober Annäherung > auch mit Wasserwellen vergleichen kann. Was wäre denn ein geeigneter > Wellenbrecher vor dem Loch in der Dose, damit nur geradlinig > eintreffende Funkwellen bis ins Innerste vordringen? > > Was macht dich glauben, dass das bei Wasserwellen möglich ist? Ganz einfach meine Beobachtungen. An vielen Meereshäfen dieser Welt gibt es Wellenbrecher. Und meistens sind sie so angebracht, dass im Hafen das Wasser ruhig ist, obwohl es "draussen" riesige Wellen hat. Wenn bei solchermassen geschützten Häfen die Wellen jedoch in einem ungeschickten Winkel ankommen, dann gibt es auch im Hafen einen höheren Wellengang. Prominentes Beispiel: Haupthafen von Monaco. mfG Ulli-B
In den Hafen kommt die Überlagerung der reflektierten, mehr oder weniger abgeschwächten Wellen rein. Bei Funk ist es ebenso, eher schlimmer, weil dreidimensional. Je kleiner der "Durchlass" (bezogen auf die Wellenlänge) ist, desto schwieriger ist die Bestimmung der ursprünglichen Richtung der Welle.
Konrad S. schrieb: > Je kleiner der "Durchlass" (bezogen auf die > Wellenlänge) ist, desto schwieriger ist die Bestimmung der > ursprünglichen Richtung der Welle. Und wie ist es mit einer Parabolantenne? Liese sich damit die Richtung besser bestimmen? mfG Ulli-B
Ulli B. schrieb: > Und wie ist es mit einer Parabolantenne? Liese sich damit die Richtung > besser bestimmen? Nein. Das Stichwort heisst hier "Wellenlänge". Der RFM02 arbeitet auf 868 MHz ( richtig? ). Die Wellenlänge ( Lambda ) von 868 MHz ist ca. 34,5 cm. Eine Parabolantenne braucht mindestens einen Durchmesser von 5 Lambda um eine sinvolle Richtwirkung zu zeigen. Also mindestens 1,73m Durchmesser ( ! ) Damit ist der Öffnungswinkel aber auch noch bescheiden. Eine Yagiantenne kann je nach Länge da sogar besser ( kleinerer Öffnungswinkel ) sein. Wie groß ist das Spielelfeld? Derartig präzise Richtungsbestimmung bzw. Ortsbestimmung wird wohl nur mit Kameras und entsprechender Software klappen.
Grundsätzlich:
Es gibt Situationen, in denen keine direkte "Sichtverbindung" möglich
ist - aber oft noch jede Menge Reflektionen.
Es gibt Situationen, in denen keine direkte Ultraschall-Verbindung
möglich ist - aber oft noch jede Menge Reflektionen.
Es gibt Situationen, in denen keine Funkverbindung möglich ist - aber
die Reflektionen sind toll.
Fazit: Es gibt keinen Universalreiniger, der alle Deine Flecken
entfernt. Aus diesem Grunde wirst Du auch sehr viel
"Intelligenz" in das System stecken, um Plausibilität
herzustellen. Egal wie Du auch lauschst.
Stefan M. schrieb: > Wie groß ist das Spielelfeld? Das Spielfeld ist 6x6 Meter gross. > Derartig präzise Richtungsbestimmung bzw. Ortsbestimmung wird wohl nur > mit Kameras und entsprechender Software klappen. Das Spielfeld ist teilweise von oben abgedeckt. Damit kommen IR, Ultraschall und Kamera nicht in Frage. Funk ist das Einzige was in Frage kommt. Es kann doch wohl nicht sein, dass es unmöglich ist einen Sender im Abstand von max. 6 Metern zu lokalisieren!? mfG Ulli-B
Ist das Feld nach oben denn offen, oder sind auch dort Hindernisse? Man kann eine Kamera mit großem Öffnungswinkel drüberhängen und mit OpenCV o.ä. den Roboter/einen Marker/LEDs darauf suchen.
Ulli B. schrieb: > Das Spielfeld ist teilweise von oben abgedeckt. Damit kommen IR, > Ultraschall und Kamera nicht in Frage. Funk ist das Einzige was in Frage > kommt. Oops, zu spät.
Du kriegst mit einer Antenne mit Größe d bestenfalls eine Winkelauflösung von lambda / d Radian, wobei lambda die verwendete Wellenlänge ist. Bei < 1 GHz wird das also mmn nichts. Da muss man irgendwie die Laufzeit des Signals verwenden, sonst kann man das vergessen.
Wie wäre es mit zwei (oder noch mehr) Phasenpeilern? http://www.grossraum-fuchsjagd.de/taktiktechnik/18-der-phasenpeiler-nach-dl6wa-und-dg2mhw
Adcockpeiler sind recht gut, aber das mit deinem Roboter löst man doch besser via GPS....oder nicht?
Intensität ist unpraktisch, das stärkste Signal ist noch lange nicht das direkte. Bei Laufzeit hast du höhere Chancen, das das direkte Signal zuerst ankommt. Leider ist die Messung von Funklaufzeiten bei 6 Metern ziemlich schwer! Da dürftest du mit Laufzeitdifferenz von Ultraschall besser dran sein. Position braucht dann aber 3 Messtellen, sonst gibt's nur Richtung.
Stefan M. schrieb: > Der RFM02 arbeitet auf 868 MHz ( richtig? ). > Die Wellenlänge ( Lambda ) von 868 MHz ist ca. 34,5 cm. > > Eine Parabolantenne braucht mindestens einen Durchmesser von 5 Lambda um > eine sinvolle Richtwirkung zu zeigen. > Also mindestens 1,73m Durchmesser ( ! ) Und wenn ich als Sender einen Videosender mit 2,4 oder 5,8GHz nehme? Dann ist 5 Lambda nicht mehr viel. Den Videosender dann einfach rauschen lassen? Nochmal für alle die nicht alles von vorne gelesen haben: Der Roboter fährt in einem Labyrinth welches von oben abgedeckt ist. Alle optische und akustische Ortungsmöglichkeiten fallen weg. mfG Ulli-B
Ulli B. schrieb: > Es kann doch wohl nicht sein, dass es unmöglich ist einen Sender im > Abstand von max. 6 Metern zu lokalisieren!? Du kennst dich zwar nicht aus in diesem Fach, bist dir aber sicher, dass es gehen muss? Positives Denken mag den Erfolg begünstigen, ist nur leider meist nicht ausreichend. ;-)
Ulli B. schrieb: > Stefan M. schrieb: >> Wie groß ist das Spielelfeld? > > Das Spielfeld ist 6x6 Meter gross. > > >> Derartig präzise Richtungsbestimmung bzw. Ortsbestimmung wird wohl nur >> mit Kameras und entsprechender Software klappen. > > Das Spielfeld ist teilweise von oben abgedeckt. Damit kommen IR, > Ultraschall und Kamera nicht in Frage. Funk ist das Einzige was in Frage > kommt. > Es kann doch wohl nicht sein, dass es unmöglich ist einen Sender im > Abstand von max. 6 Metern zu lokalisieren!? > > mfG > Ulli-B Mach doch einfach Sensoren unter die 36m², so nach dem Motto Touchpanel. Kurt
Ulli B. schrieb: > Auf dem "Spielfeld" sind auch Hindernisse aufgebaut, so dass optische > Peilung nicht funktioniert. An die Decke hängen geht nicht? Ultraschall: http://jufo.grundeis.net/gps/files/roboterprojekt.2002.pdf Oder halt mehrere der üblichen IR Baken aufstellen.
Ulli B. schrieb: > Nochmal für alle die nicht alles von vorne gelesen haben: Der Roboter > fährt in einem Labyrinth welches von oben abgedeckt ist. Alle optische > und akustische Ortungsmöglichkeiten fallen weg. Aus welchem Material ist die Abdeckung? Durchlässig für elektromagnetische Wellen? Grundsätzlich: Aufgrund der zu erwartenden Reflexionen (vorallem, wenn da im Labyrinth Hindernisse/Wände womöglich auch noch aus Metall sind) ist es oft nicht möglich zu sagen, aus welcher Richtung das Signal genau kam, egal wie gut die Richtcharakteristik der Antenne ist. Kreuzpeilung ist meiner Meinung nach hier der falsche Ansatz und auf die kurze Distanz einen Roboter zu steuern.
Also Funk über Intensität ist mehr oder weniger unmöglich bei diesen Anforderungen. Wenn dein Roboter durch ein Labyrinth fährt, wird das Signal da drin ja hin und her reflektiert und kommt nur gedämpft durch die Wand! Also kann schnell dein Roboter vor lauter Signalen unauffindbar sein. Laufzeit von Funk ist sportlich bei den Abständen. Gps ist recht ungenau, außer vielleicht du bastelst dir eine differentielle Positionsbestimmung selber. Bist du sicher, das du mit US kein Signal durch die Decke des Labyrinths durch bekommst?
Vielleicht solltest du dein Projekt einfach mal besser beschreiben. Was soll der bot machen warum brauchst du die Position... Vielleicht gibt es auch andere Möglichkeiten. gruss Matthias
Hallo Ulli Mach es doch wie bei einem autonomen Roboter. Erstelle ein zweidimensionales Array in der Größe des Spielfeldes. Der Roboter erkennt Hindernisse und trägt diese im Array ein. Dieses Array kann dann per RFM12 an den PC gesendet werden, womit die Position bekannt ist. Gruß, Bernd
Stone schrieb: > Vielleicht solltest du dein Projekt einfach mal besser > beschreiben. Was > soll der bot machen warum brauchst du die Position... Vielleicht gibt es > auch andere Möglichkeiten. > > gruss Matthias Es geht um ein reines Hobbyprojekt. Mein Roboter fährt durch ein Labyrinth, welches auch von oben abgedeckt ist. Das Labyrinth ist aufgebaut aus Sperrholzplatten. Auch die obere Abdeckung. Die Funkpeilung soll mir zeigen, wo sich der Roboter befindet. Das ist schon alles. Konrad S. schrieb: > Du kennst dich zwar nicht aus in diesem Fach, bist dir aber sicher, dass > es gehen muss? Positives Denken mag den Erfolg begünstigen, ist nur > leider meist nicht ausreichend. ;-) Danke für diese schöne Einschätzung! ;-) Ich habe ja schon im Internet nach einer Lösung für mein Problem gesucht. Doch die meisten orten per GPS. Und dann eben noch optisch (IR, Baken, ..). Dann gibt es noch die "Funker-Fuchsjagden". Selbst bei denen ist es immer nur "ungefähr". Es erstaunt mich immernoch, dass es so schwierig sein soll einen Funksender zu orten. Selbst im Freien ohne Hindernisse gibt es wohl nichts halbwegs genaues. Da fällt mir zB. als Anwendung ein Rasenmähroboter ein. Könnte man diesen genau orten, so müsste an der Rasengrenze kein Kabel verbuddelt werden. Man könnte relativ einfach Bereiche definieren, in welchen der Roboter mähen darf. Und vor allem könnte man diese Bereiche auch varieren, je nach aktueller Nutzung des Rasens oder was auch immer. Doch keine bietet so etwas an. Und GPS ist ja offensichtlich nicht genau genug dafür. mfG Ulli-B
Was du machen könntest ist Odometrie mit Korrektur der aufintegrierten Fehler über irgendwelche Markierungen. So machen das einige FTS. Die korrigieren ihre Position über Marker im Boden, das können auch einzelne Magneten sein. Der fährt dann nach Wegmessung und passt dann bei jeder Markierung seine errechnete Ist-Position wieder an. Wenn du ein gutes Fahrwerk hast sollte das auch möglich sein. Du musst aber jeden Marker genau genug treffen, um ihn auch orten zu können
Jan H. schrieb: > Was du machen könntest ist Odometrie mit Korrektur der > aufintegrierten > Fehler über irgendwelche Markierungen. ..und die Odometriedaten dann funken: Vom Roboter sind Linkes Rad / Rechtes Rad Impulszählerstand zeitlich immer im gleichen Abstand (10, 20, 50, o. 100ms) zu senden. Aus der Differenz aktueller zu letztem Zählerstand kannst Du die Richtung, in die der Roboter (? wie sieht der aus) fährt, die Geschwindigkeit mit der er sich bewegt, und die relative Distanz zum Startpunkt bestimmen. Voraus gesetzt, das Labyrinth geht nicht über mehrere Etagen ;-) Es gäbe auch noch Sensorik wie Kompassmodul, Tilt-, Pan- und Beschleunigungssensoren, davon halte ich selber wenig - und die 200,- EUR Marke dürfte dabei auch leicht überschritten werden. Aber wie sieht dein Robo aus? Ist das Labyrinth vorher bekannt, oder muss der Robo das selber aufnehmen. Bin auf Deine Lösung/Umsetzung gespannt - Viel Erfolg
Jan H. schrieb: > Die korrigieren ihre Position über Marker im Boden, das können auch > einzelne Magneten sein. Wenn er Marker am Boden anbringen kann, dann kann er auch den ganzen Boden mit Barcodes o.ä. markieren. Der Roboter braucht dann nur einen Barcodeleser um seine exakte Position per Funk durchzugeben.
Ulli B. schrieb: > Es geht um ein reines Hobbyprojekt. > Mein Roboter fährt durch ein Labyrinth, welches auch von oben abgedeckt > ist. > Das Labyrinth ist aufgebaut aus Sperrholzplatten. Auch die obere > Abdeckung. > > Die Funkpeilung soll mir zeigen, wo sich der Roboter befindet. Das ist > schon alles. Während meiner Studienzeit hab ich mehrere Semester im Robotikteam der Uni mitgearbeitet und die Position Bestimmung auf dem Spielfeld (eurobot) war immer ein Problem. Da haben viele Leute viel Zeit reingesteckt und die Ergebnisse waren OK +- 5cm. Also würde sagen es ist nicht ganz so einfach gemacht. wenn du es nur zum Spaß machst, Fang mit was einfachen an, ;). da du regeln soz. Selbst bestimmst bist du eh nicht so eingeschränkt.
Ulli B. schrieb: > > Mein Roboter fährt durch ein Labyrinth, welches auch von oben abgedeckt > ist. Warum muss das Labyrinth abgedeckt sein? Manchmal ist bei Hobbyprojekten die Lösung, die Aufgabenstellung zu vereinfachen ;-)
Ulli B. schrieb: > Es erstaunt mich immernoch, dass es so schwierig sein soll einen > Funksender zu orten. Selbst im Freien ohne Hindernisse gibt es wohl > nichts halbwegs genaues. Nein, es soll nicht so schwierig sein, ist es aber! ;-) Das "ohne Hindernisse" ist ein Problem, weil wir keine Wahrnehmungsfähigkeit für elektromagnetische Wellen haben - ausgenommen den optischen Bereich, den du nicht haben willst. Die unter guten Bedingungen erreichbare Genauigkeit einer Funkpeilung ist schon OK, nur sind die guten Bedingungen häufig nicht vorhanden und auch nicht offensichtlich. In dem Geschäft ist ordentlich Erfahrung nötig und trotzdem gibt es keine Erfolgsgarantie.
Anstatt ein sich drehendes "Funkfeuer" könntest du ein sich drehendes (IR-)Lichtfeuer nehmen. Das sollte machbar und mit relativ einfachen Tricks robust hinzukriegen sein.
mr.chip schrieb: > Anstatt ein sich drehendes "Funkfeuer" könntest du ein sich > drehendes > (IR-)Lichtfeuer nehmen. Das sollte machbar und mit relativ einfachen > Tricks robust hinzukriegen sein. So, zum dritten und letzten Mal: Es gibt keine Sichtverbindung zum Roboter! Der Roboter fährt im dunklen Labyrinth und sucht seinen Weg. Die Funkpeilung soll mir anzeigen, wo der Roboter sich befindet. Das soll auch funktionieren, wenn der Startpunkt vom Robi unbekannt ist. Odometrie geht also auch nicht. Der Roboter wird irgendwo "ausgesetzt" und soll aus dem Labyrinth heraus finden. Um das verfolgen zu können möchte ich die Position des Robis feststellen, ohne dass ich ihn sehe. Es gibt Mikrowellensoren, welche eine Bewegung durch Wände hindurch detektieren können. Die funktionieren grundsätzlich auch bei meinem Labyrint, also durch Holzwände hindurch. Nur leider detektieren diese nur eine Bewegung auf den Sensor zu oder vom Sensor weg. Mit drei solchen Sensoren ist eine Positionsermittlung möglich, solange der Robi sich bewegt. Die Nachteile sind: 1. Eine ziemliche Rechnerei (für mich zumindest, bin kein Mathe-Genie), da ja diverse Winkel und Sensorwerte miteinander verrechnet werden müssen. Ich habe dann irgendwann aufgegeben. 2. Bis nach dem einschalten der Robi mal gefunden wird kann es ewig dauern. 3. Zwischendrin geht die Robi-Position immer mal wieder verloren und es kann dann wieder ewig dauern bis er wieder gefunden wird. 4. Es darf sich auch ums Labyrinth herum nichts bewegen. Alles in Allem also nicht wirklich praktikabel. Zumindest ich hab mich damit schwer getan. Noch eine Anmerkung: Das Ganze macht "keinen Sinn". Es ist einfach nur ein Spielzeug. Ich bin gerade in der Reha und da habe ich viel Zeit um mir Gedanken zu machen. Und dabei bin ich eben darauf gekommen. mfG Ulli-B
Faden anhängen oder Kamera von Oben
Ulli B. schrieb: > Es gibt keine Sichtverbindung zum Roboter! > Der Roboter fährt im dunklen Labyrinth und sucht seinen Weg. Dann stell doch eine "Kerze" oben drauf, und nimm das mit'ner Wärmebildkamera aus der Vogelperspektive auf. SCNR ;-) > Der Roboter wird irgendwo "ausgesetzt" und soll aus dem Labyrinth heraus > finden. ..gibt's im Labyrinth auch ein Lebkuchenhaus? > Um das verfolgen zu können möchte ich die Position des Robis > feststellen, ohne dass ich ihn sehe. Funkpeilung geht augenscheinlich nicht bei 6x6m² Labyrinth. Und wenn Du das Labyrinth auf Fußballfeldgröße erweitern könntest..? Oder löse Dich von einer Aufgabenstellung, die mit der aktuellen Technik nicht zu lösen ist.. bzw. probier's aus; wenn's funktioniert melde ein Patent an und teile uns Deine Erfolgsstory mit. Ansonsten, noch gute Besserung, lg /BirgerT
Wenn sich das Labyrinth nicht ändert, könntest du über die Umgebung des Bots rausfinden wo du dich befindest. also scannen und dann mit vorhandenen Positionen vergleichen. Musst halt mindestens einmal durch fahren um die Umgebung einzuscannen. Aber da wirst du wohl mit Vektoren und winkelfunkionen arbeiten müssen.
Wie wäre eine Lösung auf Basis von Magnetismus? Auf dem Robby etwas das ein Magnetfeld erzeugt (evtl. gepulst, um konstante Felder wegkalibrieren zu können) und um das Spielfeld herum Feldsonden, die nur den Betrag des Feldes messen. Der Rest ist Mathematik und Software.
AufArbeit schrieb: > Wie wäre eine Lösung auf Basis von Magnetismus? > Auf dem Robby etwas das ein Magnetfeld erzeugt (evtl. gepulst, um > konstante Felder wegkalibrieren zu können) und um das Spielfeld herum > Feldsonden, die nur den Betrag des Feldes messen. Der Rest ist > Mathematik und Software. Geniale Idee! Danke! Das könnte wirklich funktionieren. Da muss ich mich mal schlau machen, mit welchen Sensoren ein solches Magnetfeld detektiert/gemessen werden kann. Kennt sich da jemand von Euch aus? Wenn ich einen Neodym-Magneten auf dem Roboter rotieren lasse, in welchem Abstand und mit welchem Sensor lässt sich dann dieses Wechselfeld detektieren? Funktioniert das schon mit einfachen Hall-Sensoren auf diesen Abstand? Ich glaube ich mache einen neuen Thread auf. Denn jetzt heisst es: "Wie die Position eines Roboters mit Magnetfeldsensoren ermitteln?" Oder gibt es da schon etwas dazu hier im Forum? Ich such mal ... mfG Ulli-B
Wieso muss das überhaupt Peilung sein.. Kompass und Wegstrecke :)
Philipp K. schrieb: > Wieso muss das überhaupt Peilung sein.. Kompass und Wegstrecke :) Wenn Du Dir meinen vorletzten Beitrag durchgelesen hättest, dann wüsstest Du warum. Nochmal in kurz: Ich habe keinen Anfangspunkt von dem aus eine Wegstrecke aufgezeichnet werden könnte. mfG Ulli-B
Habe ich gelesen daher ja.. Du baust Dir ein Labyrinth das Du von Oben zumachst nachdem Du den Roboter positioniert hast? Dann hat man einen Ausgangspunkt den man nur PC-Seitig definieren muss.
Philipp K. schrieb: > Habe ich gelesen daher ja.. > > Du baust Dir ein Labyrinth das Du von Oben zumachst nachdem Du den > Roboter positioniert hast? > > Dann hat man einen Ausgangspunkt den man nur PC-Seitig definieren muss. Okay, dann sag ich es anders: Ich möchte es nicht so machen wie alle anderen es machen. Ich möchte den Roboter jederzeit orten können, ohne zu wissen was vorher passiert ist. Ob der Roboter seine Wegstrecke aufzeichnet oder nicht ist mir in diesem Moment völlig egal (und natürlich zeichnet der Roboter seine Wegstrecke auf, sonst würde er ja nur durch Zufall aus dem Labyrinth heraus finden). mfG Ulli-B
Ulli B. schrieb: > sonst würde er ja nur durch Zufall aus dem Labyrinth heraus > finden). Folge der Wandseite rechts vom Roboter - damit kommt er ganz ohne seine Position zu kennen aus jedem Labyrinth raus: https://de.wikipedia.org/wiki/L%C3%B6sungsalgorithmen_f%C3%BCr_Irrg%C3%A4rten
Ulli B. schrieb: > Nochmal für alle die nicht alles von vorne gelesen haben: Der Roboter > fährt in einem Labyrinth welches von oben abgedeckt ist. Alle optische > und akustische Ortungsmöglichkeiten fallen weg. > > mfG > Ulli-B Dann nimm einen ADXL335 oder ADXL345 dazu, mach dir eine 6x6m map und kategriere mit den Koordinaten das Gesamtsystem, genauer geht es dann nicht mehr. Doch noch ein i-tüpfel: nimm den BMP180 dazu, falls du im Labi auch Höhlen und Berge erkunden musst. :)
Vorschlag (ungetestet): . Auf den Roboter kommt 1x nRF24L01+ mit Stabantenne . An den Spielfeldrand verteilt kommen 8x mit PCB-Antenne. Die PCB-Antennen haben in bestimmten Ebenen eine starke Richtwirkung. Siehe beispielsweise Seite 5 in http://www.ti.com/general/docs/litabsmultiplefilelist.tsp?literatureNumber=swru120b . Du richtetest die Empfänger-PCB-Module entsprechend aus, drehst die Module um 360 Grad während Du die Intensität misst und versucht anschließend, in den Messwerten das abgebildete Diagramm zu finden. Das ganze nicht nur 2x, sondern 8x und dann mitteln. Bzgl. der Reflektionen umliegender Betonwände muss man halt mal schauen. Die sollten mehrere dB gedämpft sein. Alternativ baust Du auf den Roboter ein sich drehendes nRF24L01+ mit PCB-Antenne und lässt die Emfpängerantennen fest. Du kennst die Frequenz f der Drehbewegung des Sender-PCB. Ein Peak (und auch low) kommt an Empfänger 1 und 2 zu unterschiedlichen Zeiten an. Daraus kannst Du den Winkel Empfänger1-Sender-Empfänger2 berechnen (zB. mit Hilfe der Korrelation) Das alles hängt davon ab, ob die Messung der Intensität schnell genug ist in Relation zur Ortsveränderung des Roboters und auch in Relation zur Drehung der Antennen. Edit: Der alternative Vorschlag ist vielleicht besser. Der hat auch den Vorteil, dass Du das sich drehende Modul nicht auslesen musst. Edit3: Edit 2 gelöscht
Ulli B. schrieb: > Da muss ich mich mal schlau machen, mit welchen Sensoren ein solches > Magnetfeld detektiert/gemessen werden kann. Mit einem Kompass, In der Navigation nutzt man das Erdmagnetfeld. Damit hast du den Winkel zum Nordpol (magnetisch) auf 1° genau (also 1/360). Vom Prinzip her brauchst du nur noch ein zweites Feld für den zweiten Winkel. Der Rest ist dann Schnittpunktberechnung (und Kalibrierung).
Lars R. schrieb: > Vorschlag (ungetestet): > . Auf den Roboter kommt 1x nRF24L01+ mit Stabantenne > . An den Spielfeldrand verteilt kommen 8x mit PCB-Antenne. > usw ... usw ... Hallo Lars, vielen Dank für diese Infos! Das entspricht genau meiner ersten Idee. Mir fehlte nur die Info, dass die PCB-Antennen eine Richtwirkung besitzen. Aber ich habe da noch eine Frage dazu: Die nRF24L01 sind doch Bluetooth-Module. Ich habe bishe nur mit BTM222 Funkverbindungen aufgebaut. Bei denen ist es so, dass immer nur zwei Module ein Paar bilden können. Wenn ich jetzt also bis zu 9 Module im Einsatz habe, wie bekomme ich dann die 8 "Aussenmodule" gleichzeitig mit dem "Robotermodul" verbunden? Oder ist es bei den Modulen auch möglich, dass die Empangsintensität auch ausgelesen werden kann, ohne dass eine Verbindung besteht? Kann eigentlich nicht sein, oder? Mit der Bitte um Aufklärung ... Ulli-B
@Lars: habe gerade das Datenblatt vom nRF24L01 überflogen. Wäre die Lösung die Shockburst-Funktion? Kann ich damit die 8 Empfänger sehr kurz nacheinander ansprechen? Und wie lese ich dann die Empfangsstärke aus? Habe da auf die Schnelle nichts gefunden. mfG Ulli-B
Ulli B. schrieb: > Das entspricht genau meiner ersten Idee. Die aus den genannten Gründen nichts taugt. Die Physik der Wellenausbreitung ändert sich auch wenn man Kaufteile verwendet.
X4U schrieb: > Die Physik der > Wellenausbreitung ändert sich auch wenn man Kaufteile verwendet. Wenn man also die richtigen Kaufteile verwendet, dann kann man die Physik in seinem eigenen Sinne verbiegen?? Okay, das finde ich gut! Jetzt muss ich nur noch die richtigen Kaufteile finden. Wie schon Commander Spock gesagt hat: "Man kann die Gesetze der Physik nicht ändern, aber man kann sie verbiegen" ;-) @Lars habs gefunden, weiss jetzt wie man die Empfangsstärke heraus bekommt (im register 09 steht es drin). Nochmals vielen Dank für die Infos! Werde ein paar der Module in China bestellen. Bin eh noch einige Zeit in der Reha. Bis die Module aus China eintreffen vergehen auch noch ein paar Wochen. Das passt dann schon. Werde dann etwas experimentieren. Wenns klappt hast Du eine Cola bei mir gut! ;-) mfG Ulli-B
. Ich habe die nRF24L01 noch nicht benutzt. . Die Übertragung erfolgt Paket-orientiert. Ein Pairing im Bluetooth-Sinne gibt es nicht. Sender und Empfänger müssen die selbe Frequenz und die selben Paketeinstellungen benutzen. In Deinem Fall ohne Ack . Sender sendet Paket. Empfänger versucht, auf die empfangenen Daten zu synchronisieren und empfängt Paket. Das Paket kann von beliebig vielen empfangen werden. . Weiteres im Datenblatt Abschnitt 6.4 Received Power Detector Seite 24) . Soweit ich das verstehe, wird am Ende des Empfangs eines Paketes der Wert des Received Power Detector gesetzt. Also möglichst viele kurze Pakete senden. . Ob der Received Power Detector letztlich dafür geeignet ist, muss man ausprobieren. . Ein paar Module NRF24L01+ mit Deutschlandversand sind nur wenige EUR teurer (ebay) X4U schrieb: > Ulli B. schrieb: >> Das entspricht genau meiner ersten Idee. > > Die aus den genannten Gründen nichts taugt. Die Physik der > Wellenausbreitung ändert sich auch wenn man Kaufteile verwendet. Ordne auf einer Ebene 3 Antennen an. Hierbei habe Antenne1 als Sende-Antenne eine wesentliche Richtchrakteristik. Antenne 2 und Antenne 3 empfangen. Drehe Antenne 1 in der Ebene mit 10Hz. Sowohl an Antenne 2 als auch an Antenne 3 wird die Signalstärke schwanken. Die Schwankungen werden periodisch sein und Periode wird 10Hz betragen. Antenne 2 und Antenne 3 werden die selbe Periode sehen, zzgl. Störungen/Reflektionen sowie zzgl. einer Phase. Die Phase beträgt maximal 180 Grad genau dann, wenn sich Antenne1 genau zwischen Antenne2 und Antenne 3 befindet. Sonst ist sie kleiner. Die Distanz zwischen Antenne 2 und 3 ist bekannt. Und dann braucht man noch ein paar Messungen. Es ist nur eine Idee. Ich lasse mich gern davon überzeugen, dass sie nicht funktioniert. Die Messung basiert aber nicht darauf, eine Beziehung zwischen der Distanz Sendeantenne-Empfangsantenne sowie der Signalstärke herzustellen. Auch bei meiner ersten Idee, die sehr Störanfällig ist, wird versucht, auf Basis mehrerer Messungen die y-Achse der Richtcharakteristik zu finden. Und nicht etwa allein mittels Ausrichten der Empfangsantenne auf den Winkel, aus der das stärkste Signal kommt.
Ulli B. schrieb: > Da werden Antennenanlagen mit sehr grossen Durchmessern verwendet. Die Größe der Antenne hängt direkt mit der Wellenlänge zusammen. Ulli B. schrieb: > Es kann doch wohl nicht sein, dass es unmöglich ist einen Sender im > Abstand von max. 6 Metern zu lokalisieren!? Im Miniatur Wunderland gibt es eine Ortungsanlage die genau auf solchen Entfernungsskalen mit Drehfunkfeuern arbeitet. Wie von dir vorgeschlagen, werden dort Funkwellen mit umlaufenden "Richtantennen" gerichtet abgestrahlt, allerdings bei Frequenzen um 320THz, die deine Hindernisse nicht durchdringen können. http://www.miniatur-wunderland.de/anlage/technik/schiff-system/steuerung/
Ich habe um die Uhrzeit nicht mehr alles gelesen, aber das klingt eventuell nach einer Anwedung für ein UWB- (Ultraweitband) System und Signalverarbeitung durch einen Kalman-Filter. https://de.wikipedia.org/wiki/Ultrabreitband http://inka.htw-berlin.de/wci/08/docs/wci08_thomae.pdf https://de.wikipedia.org/wiki/Kalman-Filter http://www.cbcity.de/das-kalman-filter-einfach-erklaert-teil-1 Ich hoffe das hilft dir weiter. Gruß Möwe
Naja, 320 THz ist ja tiefstes Infrarot, das hat ja mit Funk eigentlich nix mehr zu tun.
Warum deckst Du das Labyrinth denn ab, und warum nicht mit Plexiglas? Mach doch einen starken Magneten an den Rob, ein Kleiner wird auf der Abdeckung mitwandern! Willst Du den Weg datenmässig erfassen zur Auswertung? Gruss Chregu
Christian M. schrieb: > Warum deckst Du das Labyrinth denn ab, und warum nicht mit > Plexiglas? Das ist die selbst gesteckte Herausforderung. Den Roboter einfach nur durchs Labyrinth fahren lassen ist irgendwann langweilig. Bei Wettbewerben geht es meist darum, irgend etwas zu finden und auf zu nehmen. Diese Aufgabenstellung gefællt mir jedoch nicht. Da ist alles immer so vorausgeplant. > Willst Du den Weg datenmässig erfassen zur Auswertung? Zu erst möchte ich einfach nur den Roboter finden. Wenn ich von einem autonomen Roboter rede, dann heisst das für mich, dass ich ihn nicht überwachen muss. Er kann also durchs Haus fahren, durch den Garten fahren oder auch nur in der Garage stehen und warten. Eben das tun was er für nötig hält. Und wenn ich ihn dann brauche, dann muss ich ihn ja irgendwie finden können. Die andere Möglichkeit wäre, ich "pfeife" und er kommt zu mir. Das kommt dann vielleicht später dran. Doch es könnte ja auch sein, dass er fest hängt oder in ein Loch gefallen ist. Dann möchte ich ihn anpeilen und seine Position bestimmen können. Und um dies zu erreichen decke ich im ersten Schritt das Übungslabyrinth ab und kann üben ohne den Roboter suchen zu müssen. mfG Ulli-B
Haus, Garten, Garage ist aber schon eine ganz andere Nummer als eine abgedecktes Holzlabyrinth. Da könnte z.B. wieder IR ins Spiel kommen. In verschiedenen Raumecken unter der Decke Leuchtbarken mit unterschiedlichen Kennungen platzieren könnte da schon eher klappen.
Mach unter den Roboter einen Magneten und unter jede Zelle am Boden einen oder mehrere Reed-Schalter. Das ganze als Matrix geschaltet - fertig. Alternativ: Der Robo sendet einen IR-Code nach unten auf den Boden. Am Boden einer jeden Zelle kommt ein TSOP als IR-Empfänger.
Frank M. schrieb: > Mach unter den Roboter einen Magneten und unter jede Zelle am Boden > einen oder mehrere Reed-Schalter. Das ganze als Matrix geschaltet - > fertig. Feinere Auflösung könnte man evtl. sogar mit Hall Sensoren hinbekommen? (welche mit hoher Reichweite und dann analog auswerten)
Jürgen D. schrieb: > Haus, Garten, Garage ist aber schon eine ganz andere Nummer als > eine > abgedecktes Holzlabyrinth. > Da könnte z.B. wieder IR ins Spiel kommen. In verschiedenen Raumecken > unter der Decke Leuchtbarken mit unterschiedlichen Kennungen platzieren > könnte da schon eher klappen. Na ich fange erst mal (klein) im Labyrinth an. Wenn es da dann funktioniert, dann geht es weiter. gg schrieb: > Frank M. schrieb: >> Mach unter den Roboter einen Magneten und unter jede Zelle am Boden >> einen oder mehrere Reed-Schalter. Das ganze als Matrix geschaltet - >> fertig. > > Feinere Auflösung könnte man evtl. sogar mit Hall Sensoren hinbekommen? > (welche mit hoher Reichweite und dann analog auswerten) Leute, es geht nicht darum dass der Roboter sich zurecht findet. Der weiss schon wo er ist (naja, er weiss es meistens ;-)). Mir geht es darum, dass ICH den Roboter finde. Wenn das alles nicht klappen sollte, dann muss er mir eben auf Anfrage seine Position senden (immer in der Hoffnung dass er diese dann auch weiss). Und damit das auch gleich klar ist: Im Labyrinth und auch in der Wohnung weiss der Roboter immer ungefähr wo er ist (Odometrie). Im Garten weiss er es aber nicht immer. mfG Ulli-B
Ulli B. schrieb: >> Frank M. schrieb: >>> Mach unter den Roboter einen Magneten und unter jede Zelle am Boden >>> einen oder mehrere Reed-Schalter. Das ganze als Matrix geschaltet - >>> fertig. >> >> Feinere Auflösung könnte man evtl. sogar mit Hall Sensoren hinbekommen? >> (welche mit hoher Reichweite und dann analog auswerten) > > Leute, es geht nicht darum dass der Roboter sich zurecht findet. Der > weiss schon wo er ist (naja, er weiss es meistens ;-)). > Mir geht es darum, dass ICH den Roboter finde. Ja, ist mir doch klar. Du brauchst die Reed-Schalter bzw. IR-Empfänger im Boden doch nur über einen Mikrocontroller an Deinen PC anzuschließen. Und schon siehst DU, wo der Robo steckt. DU hast das Verständnisproblem, nicht ich.
Dann stell doch dein Labyrinth auf Waagen. einmal Schwerpunkt bestimmen ohne Robi und dann mit Robi, bei bekanntem Gewicht vom Robi kommt nur noch Mathe dazu. MfG ich
Jürgen D. schrieb: > Haus, Garten, Garage ist aber schon eine ganz andere Nummer als eine > abgedecktes Holzlabyrinth. In der Tat. Dennoch interessant zu schauen, wie weit man mit dem nRF24L01+ kommen kann. Wie ich sehe, besteht der Received Power Detector aus nur einem Bit. Das ist schon etwas wenig. Also letztlich: Paket wird empfangen ja/nein. Da kann ein Gaußfilter vor der Korrelation hilfreich sein. Überschlagsrechnung: . Datenrate 1Mbps. 6 Byte pro Paket. 90% -> 18750 Pakete/Sekunde . 18750 Pakete/Sekunde. Rotation: 10Hz -> 1.875Pakete/Rotation -> 5Pakete/Grad Diese 5 Pakete sollte man sich erstmal können. Vielleicht lieber 10 Pakete -> Rotieren mit 5Hz. Jedenfalls: . 18750 Samples/s, Gauß, Kreuzkorrelation Edit: Rotationsgeschwindigkeit sollte über eine Umdrehung möglichst konstant sein. Langsamer Drift ist unkritisch. Man könnte auch noch alle paar Rotationen die RF output power zyklisch verändern, um den Empfängern effektiv unterschiedliche Thresholds für das Power-Detector-Bit anzubieten...
Lars R. schrieb: > Man könnte auch noch alle paar Rotationen die RF output power zyklisch > verändern, um den Empfängern effektiv unterschiedliche Thresholds für > das Power-Detector-Bit anzubieten... Ist heute Murmeltiertag? Um das so zu machen müsste deine Antenne einen Öffnungswinkel von ein paar Grad haben. Geht natürlich, Parabolspiegel mit 1m +. Deshalb nimmt das Wunderland ja auch "Teraherz Wellen" zu deutsch ne Laserdiode. Deren Wirkungsgrad durch ne Spanplatte hindurch ist aber eher mau. Wurde doch weiter oben schon diskutiert.
X4U schrieb: > Lars R. schrieb: >> Man könnte auch noch alle paar Rotationen die RF output power zyklisch >> verändern, um den Empfängern effektiv unterschiedliche Thresholds für >> das Power-Detector-Bit anzubieten... > > Ist heute Murmeltiertag? Um das so zu machen müsste deine Antenne einen > Öffnungswinkel von ein paar Grad haben. Geht natürlich, Parabolspiegel > mit 1m +. Im Datenblatt des nRF24L01+ wird beschrieben, dass man mit 0,-6,-12 oder -18dBm senden kann. Man kann die Sendestärke mittels SPI-Register-Schreibzugriff verändern.
X4U schrieb: > Deshalb nimmt das Wunderland ja auch "Teraherz Wellen" zu deutsch ne > Laserdiode. Deren Wirkungsgrad durch ne Spanplatte hindurch ist aber > eher mau. Vielleicht könnte ein ordentlicher CO2-Laser diesen Schönheitsfehler beheben. SCNR

Ulli B. schrieb: > Leute, es geht nicht darum dass der Roboter sich zurecht findet. Der > weiss schon wo er ist (naja, er weiss es meistens ;-)). > Mir geht es darum, dass ICH den Roboter finde. Mach einfach den Roboter so hoch, dass Du einen Magnet von unten gegen die Abdeckung des Labyrinth platziert bekommst und papp einen zweiten Magneten von oben auf die Abdeckung dagegen. Dann siehst Du wo der Robbi rennt. Wenn Du das elektrisch willst, kannste noch ne LED-Leuchte draufbauen. Wenn Du nur Teilbereiche abgedeckt hast, geht von oben auch ein Bett mit Metallspänen (hat man mir zumindest in der Grundschule beigebracht). Das kannste dann auch mit farbigen LEDs anleuchten. Sieht bestimmt geil aus.
Hallo Die Idee von Oleg ist gar nicht mal schlecht. Es gibt doch diese Anoto Stifte, wo auf dem Papier ein spezielles Muster gedruckt ist, sodass man die genaue Position des Stiftes auf der Seite erkennt. So ein etwas größer Muster auf dem Boden und ein Maussensor sollten dann zum Ziel führen. Grüße Fasti
Schade, dass der Thread so leidet. Diese Beantwortung von Fragen, die keiner gestellt hat und die auch nichtmal eine Alternative zu den vom TO gestellten Szenario bieten, ist sonst nicht ganz so extrem hier im Forum.
Oleg A. schrieb: > Wie wäre es, wenn Du den Boden mit so etwas bedruckst? Oh, eindeutig eine Marktlücke: QR-Code-Fliesen mit 'ner UUID drauf. ;-)
Lars R. schrieb: > Schade, ... Naja, der TO hört nicht gerne, dass es mit Funkpeilung nichts wird. Da helfen auch keine tollen Ideen von Leuten, die noch nie etwas mit Funkpeilung gemacht haben.
Konrad S. schrieb: > Lars R. schrieb: >> Schade, ... > > Naja, der TO hört nicht gerne, dass es mit Funkpeilung nichts wird. Da > helfen auch keine tollen Ideen von Leuten, die noch nie etwas mit > Funkpeilung gemacht haben. Um das zu präzisieren: Wenn Du das fertig hast, mit dem Patent reich geworden bist und uns das für 'nen Appel und 'nen Ei anbieten kannst, dann würde ich gerne mehr darüber lesen... Nee, im Ernst: ohne HF-Techniker zu sein, wundert es mich, dass es so eine Nahfeldnavigation per Kreuzpeilung nicht schon lange gibt. Es fällt mir nur ein logischer Grund ein: Geht nicht (zu teuer, zu instabil, zu viele Einflussfaktoren, zu ungenau)! Ich kann's auch nur zur Kenntnis nehmen, dass ich mit meinem Tablet in der Küche am Tisch sitze, nix ankommt, aufstehe und zwei Schritte weiter (vom Router WEG) wieder Verbindung habe. Da reflektiert wohl der Metalltürrahmen günstig. Lieber TO: Hast Du schon über einen akustischen Signalgeber nachgedacht. Einen Pieper hört man auch noch durch Sperrholz.
Konrad S. schrieb: > Lars R. schrieb: >> Schade, ... > > Naja, der TO hört nicht gerne, dass es mit Funkpeilung nichts wird. Da > helfen auch keine tollen Ideen von Leuten, die noch nie etwas mit > Funkpeilung gemacht haben. Ok. Und warum funktioniert mein Vorschlag nicht? Ich kann die Bedenken wegen Reflektionen und Öffungswinkel nicht verstehen. Nimm eine LED mit 60 Grad Öffnungswinkel und lasse diese mit konstanter Geschwindigikeit rotieren. Irgendwann kommt der Lichtkegel an Punkt A vorbei und irgendwann an Punkt B. Aus der zeitlichen Differenz kann man eine Ortsinformation extrahieren. Nämlich den Winkel PunktA-LED-PunktB. Der Öffnungwinkel spielt kaum eine Rolle. Nur die Position der Flanken sollte sich gut bestimmen lassen. Gemittelt wird die "Messung" dieser Flanken über mehrere Messungen pro Sekunde. Zusätzlich wird über mehrere Orte gemessen. 90 Grad zu PunktB wird Punkt C aufgestellt und ebenso mit PunktB und C verfahren. Nun hat ein PCB-Modul keine Charakteristik wie eine LED. Aber es hat je nach Design und gewählter Ebene bestimmte Winkel mit guter Abstrahlung und Winkel mit sehr schlechter Abstrahlung. Diese verändern sich nicht zueinander. Warum es das nicht gibt: . Das Objekt benötigt eine mit konstanter Geschwindigkeit rotierende Sendevorrichtung . Es funktioniert nur in der Ebene und nicht über mehrere Etagen. . Man muss am "Spielfeld"-Außenrand mindestens 3 Empfangsantennen aufstellen. Eher mehr, um eben mehrfach zu messen. Die Empfangseinrichtungen müssen alle per Kabel verbunden sein. . Der Roboter darf sich nicht zu schnell bewegen, sonst leidet die Genauigkeit. . Es funktioniert nicht gut mit mehreren Robotern, bzw. jeder Roboter benötigt seine eigenen Empfangsantennen an den Wänden. . Es funktioniert nicht, wenn sich Metall oder Beton zwischen Sendeantenne und Empfangsantenne befinden. In jedem Raum müssen an den Wänden Empfangsantennen aufgestellt werden. (Für Infrarot auch der Fall) . Die auf diese Art erfasste Position kennt der Roboter nicht. Diese müsste dem Roboter erst mitgeteilt werden. . usw. Das alles hat der TO aber zugelassen und teilweise sogar gefordert, soweit ich weiß.
Horst S. schrieb: > Nee, im Ernst: ohne HF-Techniker zu sein, wundert es mich, dass es so > eine Nahfeldnavigation per Kreuzpeilung nicht schon lange gibt. > Es fällt mir nur ein logischer Grund ein: Geht nicht (zu teuer, zu > instabil, zu viele Einflussfaktoren, zu ungenau)! So sehe ich das auch: Wieso gibt es das nicht schon lange? Als Gründe sehe ich aber etwas anderes: - Alles stürzt sich auf GPS, da es da so schöne fertige Module dazu gibt. - Es ist noch niemandem ein dazu passendes Massenprodukt eingefallen (was sich nicht lohnt wird auch nicht entwickelt.) > Lieber TO: Hast Du schon über einen akustischen Signalgeber nachgedacht. > Einen Pieper hört man auch noch durch Sperrholz. Darüber habe ich noch nicht nach gedacht. Aus meiner Schul-Physik weiss ich noch, dass je höher die Frequenz, um so besser lässt es sich anpeilen. Weiss jemand, ob das auch durch Holzplatten noch funktioniert? Aus eigener Erfahrung weiss ich, dass man zB. auf Festen die Lautsprecher immer ziemlich genau orten kann. Auch wenn noch 3 Bierstände dazwischen stehen. Auch in Discos oder auf Festivals kann das menschliche Gehör/Gehirn die Hochtöner sehr genau orten. Egal wieviele Menschen dazwischen stehen. Nur bei sehr ungünstigem Umfeld (Tal, Häuser, massive Wände) lässt sich das menschliche Gehör/Gehirn täuschen. Könnte ich mal ausprobieren. Ein Richtmikrophon ist ja schnell gebaut. Hmmm ... ich sehe schon, Ideen gibt es genug. Wie ist es denn mit Ultraschall? Das ist ja ein Ton mit sehr hoher Frequenz. Diese Frequenz wird jedoch durch Holzplatten abgeschirmt, oder? Da muss es ja irgend eine Grenzfrequenz geben, die hoch genug ist zum gut anpeilen, jedoch tief genug ist um zB. Holzplatten zu durchdringen. Oder liege ich komplett falsch? mfG Ulli-B
hmmmm, Die Idee mit dem Drehfunkfeuer habe ich mir mal angeschaut und finde sie prinzipiel super. Die Entscheidende Frage ist ob der Roboter anhand des Signalstärkeverlaufs die Mitte der Signalkurve findet und damit weiß wann das Signal direkt auf ihn gerichtet ist und dadurch seine Richtung zum Drehfunkfeuer findet. Mit 2 Drehfunkfeuern an Definierten Positionen kann man damit eine Peilung ausführen. Entscheidend ist aber die Richtcharakteristik des Signalgebers und Genauigkeit des Empfängers. Ansonsten wäre es noch evtl eine Idee das Feld mit einem Magnetfeld zu durchsetzen das Linear verläuft. Wenn dann ein Schwellenwert (z.b. 0 uTesla) erreicht wird sendet der Roboter ein Signal. Das Magnetfeld läuft dabei abwechseln in X und in Y Richtung von oben nach unten durch. Wenn man die genaue Zeit hat an der der Roboter das Signal gesehen hat bei den X und Y durchläufen hat man auch die Position. Dafür muss aber das Magnetfeld gegen externe Einflüsse gesichert werden, bzw mit Sensoren über das Labyrinth müssen Fehler rausgerechnet werden.
Sven B. schrieb: > Naja, 320 THz ist ja tiefstes Infrarot, das hat ja mit Funk eigentlich > nix mehr zu tun. Wo ist denn bei dir tiefstes Infrarot? 940nm sind vielleicht nicht mehr mit dem Auge sichtbar, aber Glaslinsen funktionieren noch sehr gut. Und wo siehst du den prinzipiellen Unterschied zwischen elektromagnetischen Funkwellen und elektromagnetischen Lichtwellen, außer dass sie unterschiedlich lang sind und auf Grund technischer Gegebenheiten unterschiedlicher Erzeugungsmechanismen bedürfen?
Das ganze nennt sich übrigens IPS "indoor positioning system" und hat sogar eine eigene Wikipedia Seite wo alle hier genannten relevanten Lösungen aufgeführt sind. Gerade bei einem Labyrinth wo man nichtmal die Barrieren der Funkstrecke definieren kann ist das höchstens 2m über dem Labyrinth möglich.. und dann nur mit viel Glück. Beim NRF24 sinkt der Ping auf Distanz.. wenn man mehrere Pakete 10mal hin und her sendet kommt man vielleicht in den Millisekundenbereich wenn man dann noch ACK nutzt könnte das Ergebnis bringen, rein theoretisch.
Falls eine Wellenlänge größer ist als der Garten, wird nichts reflektiert und man kann damit peilen. Das geht mit VLF, LW und MW ohne große Probleme. Als Antennen kommen Ferritantennen in Frage. Werden zwei Ferritantennen über Kreuz angeordnet kann auch die Phase ausgewertet und der Winkel eines Signals direkt bestimmt werden. Werden nun 2-3 Sender mit unterschiedlichen Frequenzen auf dem Grundstück verteilt, so kann der Roboter an jeder beliebigen Stelle auf dem Gelände eine Kreuzpeilung vornehmen. Der Schlüssel ist die niedrige Frequenz und Empfang der magnetischen Komponente. Es empfiehlt sich, die Kreuzantenne elektrisch abzuschirmen. Seite 1-20 http://de.slideshare.net/alexantrine92/nav-topic-8-automatic-direction-finder
B e r n d W. schrieb: > Falls eine Wellenlänge größer ist als der Garten, wird nichts > reflektiert und man kann damit peilen. Das geht mit VLF, LW und MW ohne > große Probleme. Irgendwie spisst sich diese Aussage. Wieso sollte eine LW nicht reflektiert werden? Kurt
> Wieso sollte eine LW nicht reflektiert werden?
An was, am Mond? Zumindest muss sich das Objekt im Fernfeld befinden.
Rechnet man dann hin und zurück, sind das mehrere km Distanz. Verglichen
zur direkten Welle im Nahfeld ist die reflektierte Signalstärke
verschwindend gering, falls überhaupt noch nachweisbar.
B e r n d W. schrieb: >> Wieso sollte eine LW nicht reflektiert werden? > > An was, am Mond? Zumindest muss sich das Objekt im Fernfeld befinden. > Rechnet man dann hin und zurück, sind das mehrere km Distanz. Verglichen > zur direkten Welle im Nahfeld ist die reflektierte Signalstärke > verschwindend gering, falls überhaupt noch nachweisbar. Was hat denn eine Reflektion mit der Entfernung zu tun, was mit der Wellenlänge? Kurt
Ich weise mal daraufhin, dass auch ein Navi auf GPS-Basis im Auto im Tunnel Radumdrehungen mitzählen muss, um eine Position im Tunnel zu berechnen. Funk alleine ist da auch keine Lösung. Hans
tofro schrieb: > Ich weise mal daraufhin, dass auch ein Navi auf GPS-Basis im Auto im > Tunnel Radumdrehungen mitzählen muss, um eine Position im Tunnel zu > berechnen. Oder du integrierst über die Beschleunigungssensoren. Das reicht als grobes Schätzeisen in Kombination den Last Known Fix bis du wieder Empfang hast.
tofro schrieb: > Ich weise mal daraufhin, dass auch ein Navi auf GPS-Basis im Auto > im > Tunnel Radumdrehungen mitzählen muss, um eine Position im Tunnel zu > berechnen. > > Funk alleine ist da auch keine Lösung. > > Hans Das war mal bei den ersten Navis so. Da mußten noch Radsensoren verbaut werden. Mittlerweile wird die Position anhand des Kartenmaterials (auf der Straße bleiben) und der Geschwindigkeit (wird vom Tachosignal genommen) bestimmt. Radsensoren als Odometrie sind schon längst passé.
npn schrieb: > Radsensoren als Odometrie sind schon längst passé. Weil die "Geschwindigkeit extrapolieren"-Lösung für Auto-Navigation "gut genug" funktioniert. Bei den Hochpräzisions-Inertialmesssystemen für z.B. Autos oder Züge werden nach wie vor Odometrie- o.ä. Sensoren benutzt, weil die auch einfach super genau sind.
npn schrieb: > Mittlerweile wird die Position anhand des Kartenmaterials (auf > der Straße bleiben) und der Geschwindigkeit (wird vom Tachosignal > genommen) bestimmt. Handynavis können das super per Gyroskop usw. Der Thread ist alt, aber eine Lösung heutzutage wäre ein Funkpeilsystem z.B. von DecaWave (Ultrawideband indoor Location). Ähnliches macht man auch wohl mit BluetoothLE-Beacons.
Werner schrieb: > Such mal nach "Drehfunkfeuer" - funktioniert seit über 100 Jahren. Lass das bleiben! Zu einfach!
Lachnusspapier schrieb: > Werner schrieb: >> Such mal nach "Drehfunkfeuer" - funktioniert seit über 100 Jahren. > > Lass das bleiben! Zu einfach! In einem "normalen" Zimmer? Zeig mal :-) Ulli B. schrieb: > es geht um einen kleinen Roboter (auf Rädern) dessen Position ich gerne > per Kreuzpeilung ermitteln möchte. Jens M. schrieb: > Der Thread ist alt, aber eine Lösung heutzutage wäre ein Funkpeilsystem > z.B. von DecaWave (Ultrawideband indoor Location). Ja - wir bewegen uns wohl im Nanosekunden-Bereich ... mit entsprechenden Abstimm-Problemen.
Hugo H. schrieb: > Lachnusspapier schrieb: >> Werner schrieb: >>> Such mal nach "Drehfunkfeuer" - funktioniert seit über 100 Jahren. >> Lass das bleiben! Zu einfach! > > In einem "normalen" Zimmer? Zeig mal :-) Mein Gott! Du bist hier bei uC.Net! Da sind dumme Kommentare (auch von mir) normal.
Lachnusspapier schrieb: > Da sind dumme Kommentare (auch von > mir) normal. Nö - das impliziert, dass es Deine Meinung ist - und die ist in diesem Fall schlichtweg falsch.
Hugo H. schrieb: > Ja - wir bewegen uns wohl im Nanosekunden-Bereich ... mit entsprechenden > Abstimm-Problemen. Wetten du hast nichtmal nach DecaWave gegoogelt? ;) Das sind fertige Module ähnlich denen mit nem ESP8266 drauf, komplett fertig, mit der speziellen Antenne. Die kommen an einen anderen Mikrocontroller und können dem sagen wie weit andere DecaWave-Beacons weg sind, und zwar erstaunlich genau, trotz sich bewegender Menschen mit Handies auf einer Messe rund um den Stand. Sehr imposant fand ich. Der Rest ist Mathe. Manche McD-Filiale benutzt ein ähnliches System, wobei das m.W. auf Bluetooth basiert: Das "Nummernschild", das du bei aktueller Nichtlieferbarkeit deines Verpflegungswunsches mit an deinen Tisch nimmst, hat eine Beacon eingebaut, und an der Theke ist ein Bildschirm mit einer Karte des Restaurants auf der die Beacons lokalisiert werden. Die Dinger sind so gut, das man sehen kann das die Beacon nicht auf dem Tisch steht sonder auf dem Hocker davor. Obwohl der Tisch auf dem Display kaum größer als eine große Briefmarke ist. Und auch da ist an Leuten und HF kein Mangel.
Hugo H. schrieb: > Lachnusspapier schrieb: > Da sind dumme Kommentare (auch von > mir) normal. > > Nö - das impliziert, dass es Deine Meinung ist - und die ist in diesem > Fall schlichtweg falsch. Nö - das impliziert, dass es Deine Meinung ist - und die ist in diesem Fall schlichtweg falsch.
Jens M. schrieb: > Wetten du hast nichtmal nach DecaWave gegoogelt? ;) Nein wozu - ich kenne die. Du hast meinen Post nicht gelesen - der bezog sich auf das "Drehfunkfeuer".
Lachnusspapier schrieb: >> Nö - das impliziert, dass es Deine Meinung ist - und die ist in diesem >> Fall schlichtweg falsch. > > Nö - das impliziert, dass es Deine Meinung ist - und die ist in diesem > Fall schlichtweg falsch. Du kannst kopieren - wie einfallsreich :-)
Hugo H. schrieb: > Lachnusspapier schrieb: > Nö - das impliziert, dass es Deine Meinung ist - und die ist in diesem > Fall schlichtweg falsch. > > Nö - das impliziert, dass es Deine Meinung ist - und die ist in diesem > Fall schlichtweg falsch. > > Du kannst kopieren - wie einfallsreich :-) Du kannst kopieren - wie einfallsreich :-)
Microwellenpositionierung sollte hier helfen, dass gibts schon für relativ kleines Geld. 4-5 DW1000 (Decawave-Module, sie schon oben erwähnt) und ein wenig Software. c't hatte da schon mal einen ganz guten Artikel, leider hinter der Paywall: https://www.heise.de/select/ct/2019/20/1569592328208307 Immerhin sind die verlinkten Quellen für jedermann offen: https://www.heise.de/select/ct/2019/20/softlinks/y4kn?wt_mc=pred.red.ct.ct202019.044.softlink.softlink Und last but not least: Auch hier im Forum wurde das schon diskutiert: Beitrag "Localino - Open Source UWB Indoor Location System" Ob das dem TO von der Genauigkeit reicht, ist die Frage. Sollte aber derzeit die genaueste Lösung sein, die für kleines Geld gibt.(200-400€, je nach Anzahl Sateliten etc)
Hugo H. schrieb: > Du hast meinen Post nicht gelesen - der bezog sich auf das > "Drehfunkfeuer". Du hast mich unmittelbar vorher zitiert, daher bin ich davon ausgegangen, das deine Antwort sich auf mein Zitat bezog... :( Bastler schrieb: > Ob das dem TO von der Genauigkeit reicht, ist die Frage. Der TO ist schon Jahre durch mit seinem Studium... ;)
ich finde das Hervorholen uralter Threads irgendwie sehr unschön. Meist bemerkt man nicht welches Datum oben steht und glaubt es sei was aktuelles. Dadurch verplämpert man jede Menge wertvolle Zeit. Bitte neuen Thread aufmachen und diesen Thread hier schließen. :)
in den Leichenthread getappter schrieb: > Dadurch verplämpert man jede Menge wertvolle Zeit. Wir vergolden wertlose Zeit
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.