Hallo, ich möchte einen Prüfstand für Drehmomente selbst aufbauen. Folgendes sollte der können: 1) Drehmoment eines selbst gebauten Winkel-Antriebes messen (Messfehler < 1%). Das Drehmoment wird sich voraussichtlich zwischen 5Nm und 30Nm bewegen. Darüber hinaus können spitzen mit 50Nm auftreten. Es genügt auch ein statischer Drehmomentsensor, da der Bewegungsradius nicht 180° überschreitet und die Drehgeschwindigkeit (min 5s für 90° => 3U/min) langsam ist . 2) Position messen wobei der Antrieb einen Bewegungsradius von max 180° hat. In der ersten Ausbaustufe nur 90°. Ich denke, dass ich hier einen Inkrementalgeber verwenden werde. Eine Auflösung von 500 Impulse/U würde genügen. Wobei ich bei rotierenden Drehmomentsensoren auch schon optional eine Positionsmessung gesehen habe. 3) Aktive Beeinflussung des Drehmoments mithilfe externer Kraft. Hier stelle ich mir vor, dass über einen Hebel (10-20cm) ein Linearantrieb (Spindelantrieb mit Schrittmotor) das Drehmoment regelt. Eine Spindellänge von 200mm würde genügen. Die Kraft sollte dann bei 500N liegen. Max Geschwindigkeit von 50mm/sec genügt. Der Sinn dahinter ist, dass der selbst gebaute Antrieb verschiedene "Drehmomentsprofile" automatisch erkennen soll und dann verschiedenst darauf reagieren soll. Aufbau: Den selbst gebaute Winkel-Antrieb statisch fixieren. Darauf möchte ich den Inkrementalgeber (Hohlwelle) montieren, danach den Drehmomentsensor und auf dem den Hebel zum fixieren oder zur dynamischen Vorgabe des Drehmomentes. Am Hebel wird dann im Abstand von 10 bis 20cm der Linearantrieb fixiert. Hier besteht noch die Überlegung ob eine Druck und Zugfeder bzw eine Wellenkupplung zur dynamischen Kraftübertragung eingebaut werden soll. Die Auswertung der Sensoren und Ansteuerung des Linearantrieb (Spindelantrieb) soll mittels Arduino (entweder Mega oder Due) erfolgen. Meine Fragen: zu 1) Kennt jemand einen passenden Drehmoment-Sensor der mit dem Arduino ohne zu viel Selbstbau funktioniert? Ich habe schon einiges gefunden jedoch sind manche extrem teuer. Deshalb wäre eine Empfählung nett. zu 2) Wie 1 jedoch für den Inkrementalgeber. Hier habe ich folgenden in Aussicht jedoch sehe ich hier nicht ob der eine durchgehende Hohlwelle hat. http://at.rs-online.com/web/p/drehgeber/2056869/ zu 3) Vielleicht hat auch jemand Tipps für mich welcher Schrittmotor mit Spindel sich dafür eignet. Brauche ich dazu das Arduino Motor Shield? Vielen Dank für eure Hilfe! godi
Die Physik nutzen. Drehmoment ist Kraft x Hebelarm. Wenn der Prüfling durch Gegenkraft zum Stillstand kommt hat er sein maximales Drehmoment erreicht. Die Gegenkraft kann z.B. durch eine Wassersäule aufgebracht werden und Hebelarm wäre die Rotoren einer Pumpe. Für die Wassermenge kann man dann einen bezahlbaren Durchflussmesser nehmen oder lässt sich andere Tricks einfallen. Den Rest lässt man den µC berechnen. Bisschen experimentieren und rechnen muss man dann schon mal.
Godi S. schrieb: > > 3) > Aktive Beeinflussung des Drehmoments mithilfe externer Kraft. > Hier stelle ich mir vor, dass über einen Hebel (10-20cm) ein > Linearantrieb (Spindelantrieb mit Schrittmotor) das Drehmoment regelt. > Eine Spindellänge von 200mm würde genügen. Eine Kraft ist aber kein Drehmoment. Dein Plan ist unverständlich. -> Zeichnung! > Aufbau: > Den selbst gebaute Winkel-Antrieb statisch fixieren. Darauf möchte ich > den Inkrementalgeber (Hohlwelle) montieren, danach den Drehmomentsensor > und auf dem den Hebel zum fixieren oder zur dynamischen Vorgabe des > Drehmomentes. -> Zeichnung! > Meine Fragen: > zu 1) > Ich habe schon einiges gefunden jedoch sind manche extrem teuer. Bei unter 1% geforderter Genauigkeit wirds nun mal teuer.
Hi, klemm nen hebel hin und mach ein Auf Balkenwaage. Differenz zw. Links und rechts mal Balkenlänge/2 ist dein Drehmoment. Wäre meine einfache Lösung. Musst halt mit kalibrierten Gewichten arbeiten. Mfg ich
Angehängte Dateien:
-

Pruefstand.jpg
230 KB
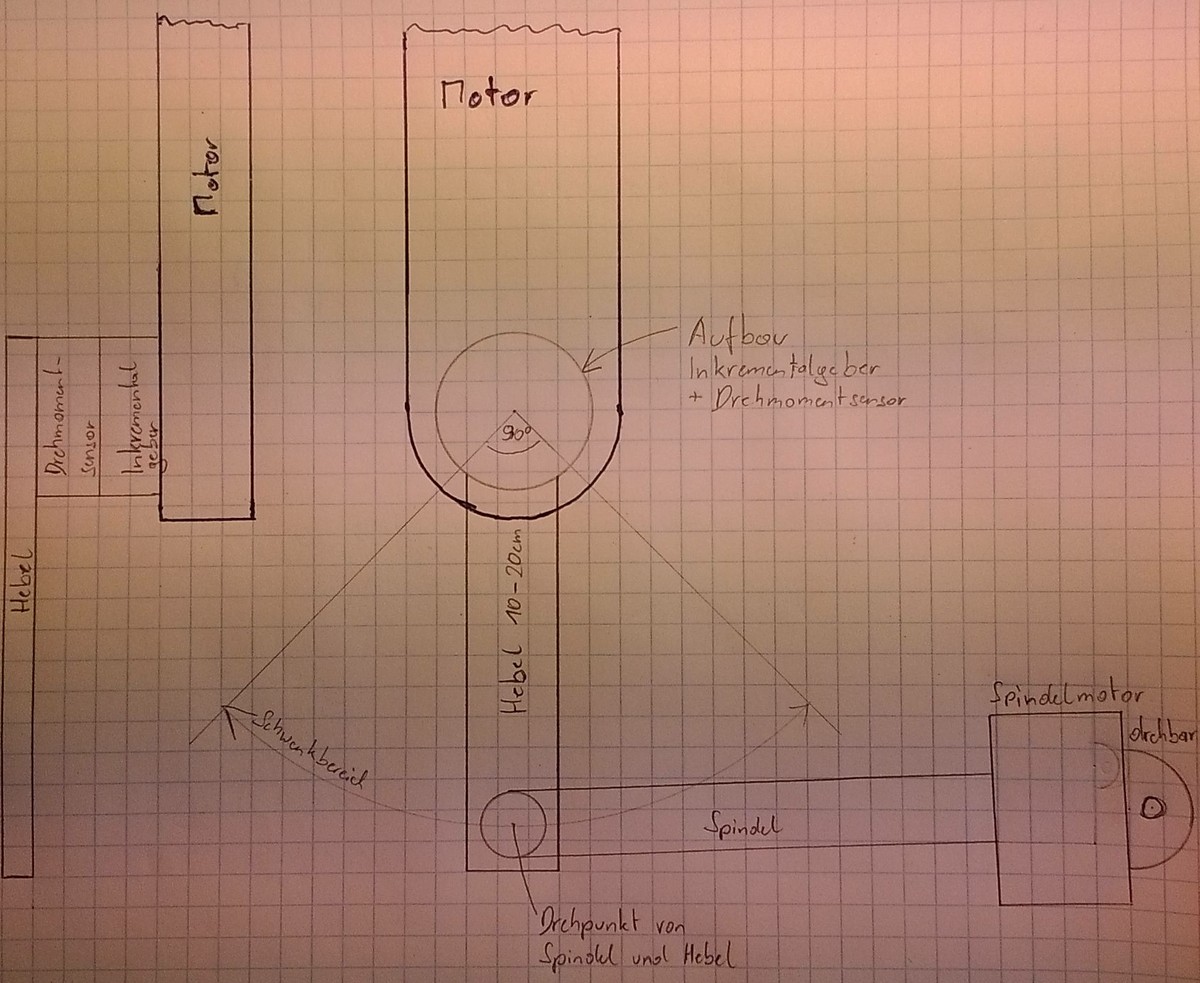
Hallo, danke für eure kreativen Lösungsvorschläge. :) Die Physik dahinter ist mir klar und ein wenig was kosten darf es auch, soll ja auch was solides dabei rauskommen. Die Sensoren sollen nur nicht in die tausende Euro gehen. Anständige Inkrementalgeber habe ich eh unter 200€ auch gefunden. Jedoch brauche ich hier nicht die super Auflösung. Drehmomentsensoren habe ich um ca 500€ gefunden jedoch irgendwie nicht die passenden und mit einer Genauigkeit von <0.1%. So genau brauche ich es nicht, da ist ja nichtmal der Analog Input des Arduino so genau. Die < 1% habe ich oben nur als Richtwert angegeben, Notfalls kann es auch darüber sein. Ich habe mir gedacht, dass es dann Sensoren um die 200 bis 300€ gibt in diesem Bereich. Wie oben beschrieben braucht auch der Spindelmotor kein supertolles Ding sein. Er sollte einfach mit dem Arduino ansteuerbar sein. Im Anhang habe ich eine Skizze so wie ich mir das vorstelle angehängt. Also Selbstbaulösungen von Sensoren sind zwar Interessant aber die benötige ich in diesem Fall nicht. :-) godi
Ich verstehe Deine Zeichnung nicht. Wenn der "Motor" fest und Die Achse des Auges des Spindelmotors auch fest ist, dann wird da nur das geschwenkt, was der Spindelmotor stellt. Und warum sollte das Drehmoment des Motors ueber den Winkel schwanken? wendelsberg
wendelsberg schrieb: > Ich verstehe Deine Zeichnung nicht. > Wenn der "Motor" fest und Die Achse des Auges des Spindelmotors auch > fest ist, dann wird da nur das geschwenkt, was der Spindelmotor stellt. > > Und warum sollte das Drehmoment des Motors ueber den Winkel schwanken? > wendelsberg Also der Motor ist, wie oben schon erwähnt, selbstgebaut und führt eine "Scheibenwischbewegung" aus. Dieser besitzt auch eine eigene Elektronik und wird unabhängig vom Prüfstand angesteuert. Die Sensoren die ich oben eingezeichnet habe gehören zum Prüfstand und werden von diesem ausgewertet. Wenn man sich den Linearantrieb wegdenkt, dann bewegt sich der Hebel nur hin und her, also angetrieben vom Motor, und das Drehmoment am Sensor ist gleich null (abgesehen von der Beschleunigung der Massen ;)). Nun möchte ich den Motor aber belasten. Da kommt der Linearantrieb ins Spiel. Dieser wird so geregelt, dass der Motor z.B. mit 20Nm über die ganze Bewegung belastet wird. Dadurch soll eine reale Belastung des Motors simuliert werden. Ich hoffe jetzt ist es verständlicher.
Godi S. schrieb: > Nun möchte ich den Motor aber belasten. Da kommt der Linearantrieb ins > Spiel. Dieser wird so geregelt, dass der Motor z.B. mit 20Nm über die > ganze Bewegung belastet wird. Dadurch soll eine reale Belastung des > Motors simuliert werden. Oh. Das geht ja in eine ganz andere Richtung. Und deswegen einen Drehmomentsensor an die Achse bauen? Ein Spindelmotor laesst sich ja prinzipbedingt nicht mechanisch an der Spindel antreiben. Wenn ich 20Nm (regelbar) Drehmoment erzeugen sollte, wuerde ich einen Motor (evtl. mit Getriebe) direkt an den Drehpunkt ankoppeln. Den kann man dann mit entsprechendem Strom bremsen oder auch "gegenhalten". Wenn die gemeinsame Achse ein Fixpunkt ist, kann die "hintere/obere" Befestigung des zu messenden Motors einen einfachen Kraftsensor bekommen, da geht dann noch dessen Abstand zum Drehpunkt ein. Aber da muesste ich erst mal drueber schlafen. wendelsberg
wendelsberg schrieb: > Wenn ich 20Nm (regelbar) Drehmoment erzeugen sollte, wuerde ich einen > Motor (evtl. mit Getriebe) direkt an den Drehpunkt ankoppeln. Den kann > man dann mit entsprechendem Strom bremsen oder auch "gegenhalten". Daran habe ich auch schon gedacht, da aber die Drehzahl des selbst gebauten Motor sehr gering ist, müsste da eine große Übersetzung drauf. Weiters müsste da eventuell eine "Elastizität" zwischen den beiden Antriebswellen, damit das Drehmoment nicht zu Sprunghaft wird. wendelsberg schrieb: > Wenn die gemeinsame Achse ein Fixpunkt ist, kann die "hintere/obere" > Befestigung des zu messenden Motors einen einfachen Kraftsensor > bekommen, da geht dann noch dessen Abstand zum Drehpunkt ein. Das war eigentlich meine erste Idee, da bin ich aber bei der Suche auf die Drehmomentsensoren gestoßen, die mir vielversprechender aussahen, weil ich keinen Druck und Zugsensor bräuchte. Weiters müsste ich dann während der Bewegung die Winkel zwischen Spindel und Hebel berechnen und in die Kraft einfließen lassen. Naja wäre eigentlich auch kein Problem. wendelsberg schrieb: > Aber da muesste ich erst mal drueber schlafen. Dann wünsche ich dir eine ruhige und erholsame Nacht! :) Danke für deine Anregungen! godi
Bei den Elektrofahrrädern messen die auch wohl das Drehmoment (habe ich mal irgendwo im "vorbeigehen" gelesen). Vielleicht kannst du da noch eine Idee oder einen Sensor ableiten. Wir haben auch so eine Art Drehmomentsensor in sehr alten Fahrzeugen, für die Lenkung gehabt. Eine Feldplatte wurde durch einen Magneten beeinflusst und das Drehmoment wurde durch Gummis bewirkt. Wenn es billig werden soll, könnte man sowas mit nem Hallgeber selbst bauen. Es könnte auch gegen eine Feder drücken. Da gibt es, soweit ich weiß, auch Angaben welche Kraft die Feder ausübt. zum Abgleich könnte man einen Drehmomentschlüssel nehmen.
Hallo, bei den Ebikes habe ich nichts genaueres gefunden, ausser dass es Bikes mit Drehmomentsensoren gibt und welche die nur Sensoren haben, das erkannt wird, dass der Radfahrer tritt. Als Drehmomentsensor habe ich diesen gefunden: http://www.me-systeme.de/sensorik/drehmomentsensoren/td110a.html?id=3 Der ist mir aber eindeutig zu teuer. Deshalb bin ich eher wieder der Meinung, dass vielleich doch ein Druck/Zugsensor besser ist und dieser beim Hebel fixiert wird. Z.B. wie dieser hier: http://www.megatron.de/produkte/s-beam-kraftsensoren/s-beam-kraftsensor-serie-km500-500n.html Weiters habe ich mal angefragt was der Hall Drehgeber kostet. http://www.megatron.de/produkte/hall-effekt-singleturn-drehgeber/kontaktlose-hall-drehgeber-serie-ena28-ecoturnR.html Hat noch jemand Ideen für den Linearantrieb?
Man koennte sich auch eine Seilscheibe (oder auch nur ein 90 Grad-Segment) mit einer daran haengenden Last direkt auf der Motorwelle vorstellen. Wenn die Last z.B. ein Wassereimer waere, dann waere die Last mit wenig Aufwand einstellbar ;-) Wenn die Abweichung der Last (bei 45 Grad Winkel nur noch 0,7 * Hebelarm) nicht stoert, dann kannst Du die Last direkt an den waagerechten Hebel haengen. Nachteil: Wirkt nur in eine Richtung. wendelsberg
Hallo, ja solche Experimente wurden an dem Projekt, bevor ich zu diesem gekommen bin, auch schon durchgeführt. Jedoch alles nicht wirklich aufgezeichnet / Dokumentiert. Ein dynamisches Verhalten bekomme ich aber auch nicht hin, da ich schwierig während der Bewegung dann 5 Liter Wasser dazuschütten kann und so eine Kennlinie des selbstgebauten Motors erstellen kann.
Hi, oder halt 2 E-Motoren kaufen, back to back messen und dann kennst du ja deine Motoren. Drehzahl und elektrische Leistung muss halt gemessen werden. MfG ich
Godi S. schrieb: > da ich schwierig während der Bewegung dann 5 Liter > Wasser dazuschütten kann und so eine Kennlinie des selbstgebauten Motors > erstellen kann. Dann nimm einen Luftzylinder als Gegenpart und beaufschlage den mit einem konstanten und/oder regelbaren Druck. wendelsberg
Tretlager ( Messung der Drehrichtung , der Trittfrequenz und des Drehmomentes) aus dem eBike Sektor ... z.b.: in der Bucht mit der Artikelnummer : 370815321263 Datenblatt im Anhang (unter anderem Seite 9 und 11). Grüße Pong L.
Zur Drehmomentsmessung kann ich dir folgendes System empfehlen: http://www.sensortelemetrie.de/de/produkte/drehmomentmesstechnik.html Ist dann auch die Frage, wie die Datenübertragung deiner Werte erfolgen soll, meines Wissens ist eine kabellose Übertragung immer gut. http://www.sensortelemetrie.de/de/produkte/funk-telemetrie.html Lohnt sich vielleicht mal vorbeizuschauen, soweit ich weiß hat Manner auch nen Shop, ob er dort aber auch die gewünschten Produkte anbietet weiß ich leider nicht. Gruß
Godi S. schrieb: > Die Sensoren sollen nur nicht > in die tausende Euro gehen. @CP1492: > meines Wissens ist eine kabellose Übertragung immer gut. Nach meiner Erfahrung ist kabellos immer störanfällig. Manner liefert schöne Messtechnik und Telemetrie, aber wohl nicht zum oben genannten Kriterium.
Hallo, Danke für eure Antworten. So jetzt habe ich kurz wieder ein wenig Zeit gefunden mich mit dem auseinanderzusetzen. Als Drehmomentsensor werde ich höchstwahrscheinlich den von ME verwenden: http://www.me-systeme.de/sensorik/drehmomentsensoren/ts110a.html?id=1 Jedoch Inkrementalgeber weiß ich leider noch nicht, welchen ich nehmen soll. Preisvorstellung: < 200€ Versorgungsspg: Wenn geht, 5V Ausgangssignal: Inkremental oder Analog. Muss irgendwie an einen SAM4E8C angeschlossen werden können. Auflösung: 3600 wären ganz nett. Notfalls wenn es Preislich nicht anders geht bin ich auch mit >=1000 zufrieden. Hohlwelle mit Innendurchmesser ca. 12mm sollte auch vorhanden sein. Der aktuelle Messbereich wird 60° nicht überschreiten, deshalb ist auch ein Singleturn möglich. Habe auch Hallsensoren gefunden die eine Auflösung von 12Bit bei 90° haben, jedoch nirgends wo Preise. Hat hier noch wer Tipps für mich? Bzw wo kann ich einen Suchen wo auch ein Preis angegeben ist? godi
Hallo Zusammen, ich will mal auch einen Drehmomentprüfstand selber bauen aber ich habe echt kein plan wie ich anfangen soll... Ich will die teile auch selbst konstruieren. Kann mir vielleicht hierbei jemand helfen?
Integrier die Drehmomentmessung in die Befestigung des zu prüfenden Motors, dann muss sie nicht mitdrehen. Dazu reicht ein Gelenk und eine Kraftmessung mit bekanntem Hebelarm. Das Drehmoment stellst du an der Welle mittels einer Reibbremse oder eines Gegenmotors ein.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.