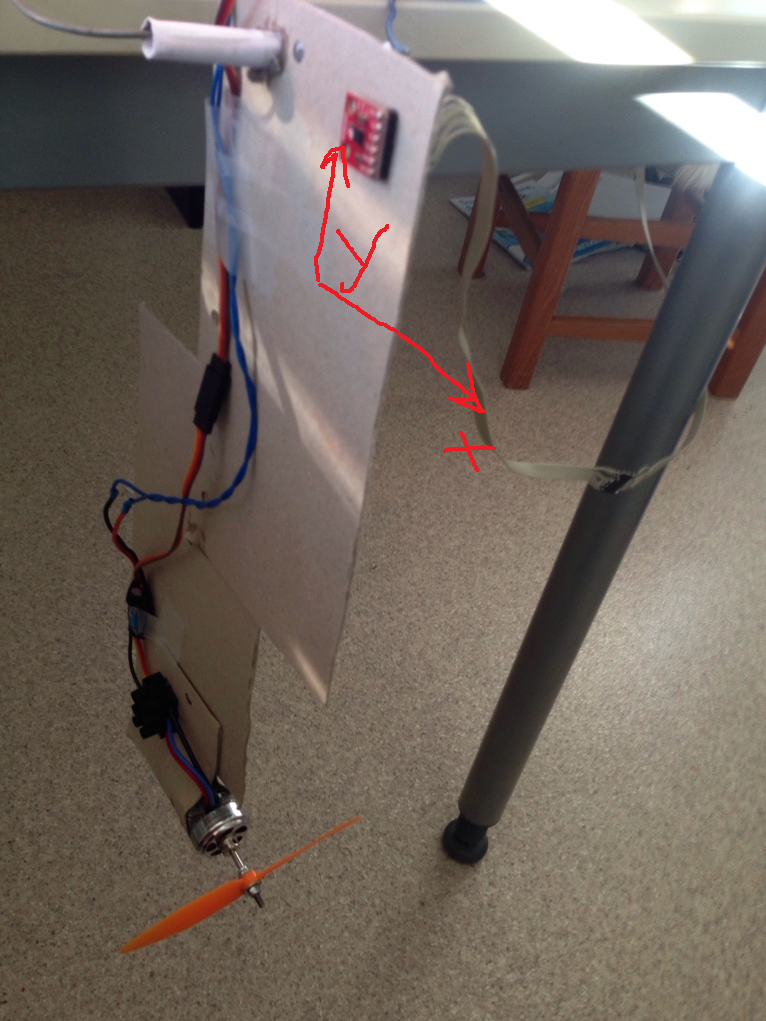
Hallo zusammen, Es existieren ähnliche Threads, ich möchte hier nur eine grundsätzliche Frage stellen. Habe momentan etwas zu viel Zeit und würde gerne auf einem Arduino eine Regelung implementieren, welche die Pappe durch den Propeller (Bild) in einen gewünschten Winkel bringt. Zur Neigungsmessung wollte ich einen Beschleunigungssensor MMA8152 einsetzten (Achsen im Bild eingezeichnet). Den Winkel bestimme ich mit atan(gy/gx) was im Falle wenn der Motor nicht dreht auch bestens funktioniert. Leider schwingt die Pappe ganz schön mit wenn der Motor dreht, was den Beschleunigungssensor völlig aus dem Konzept bringt. Bei einer konstanten Neigung von ca. 10 Grad kommen die unwahrscheinlichsten Werte raus. Nun zur Frage. Würde ein Low-Pass auf Softwarebasis reichen um diese Probleme in den Griff zu kriegen oder muss auch ein Gyro eingesetzt werden (oder halt wieder ein Poti....)? Vielen Dank für jegliche konstruktiven Antworten Gruss, Sam
Angehängte Dateien:
-

setup.png
910 KB
Ich denke, du brauchst zuerst einen analogen einen Low-Pass Filter, der zum Abfrageintervall passt. Manche Chips haben sowas integriert, aber nicht alle. Danach kannst du per Software weiter filtern, zum beispiel um den Tiefpass noch tiefer zu machen.
Der Beschleunigungssensor gibt kein analoges Signal er kommuniziert per i2c. Daher müsste ich wohl einen Softwarefilter implementieren oder?
Stefan U. schrieb: > Ich denke, du brauchst zuerst einen analogen einen Low-Pass > Filter, der > zum Abfrageintervall passt. Manche Chips haben sowas integriert, aber > nicht alle. > > Danach kannst du per Software weiter filtern, zum beispiel um den > Tiefpass noch tiefer zu machen. Achso, got you! Ja dieser Chip hat das wirklich! Besten Dank für den Hinweis :-)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.