Hallo alle zusammen, ich bin gerade dabei ein Echolot für ein Modellboot zu entwerfen und ich suche einen Tondecoder um das empfangene Signal zu detektieren. Dafür bin ich auf den LM567 gestoßen und bin mir nun nicht sicher ob dieser IC schnell genug ist um das Signal zu detektieren. ich wollte den Ausgang dann auf den Interrupteingang eines Atmegas bringen der dann die Laufzeit berechnet. Hat jemand schon damit seine Erfahrung gemacht? Vielen Dank schon im vorraus. VG Emanuel
Vielen Dank. Dann werde ich mich doch an einen Bandpass mit Schmitt trigger machen und das damit versuchen zu detektieren. Hätte mich über ein kurzes Warum gefreut aber nehme dass als Erfahrungswert ;). VG
> Hätte mich über ein kurzes Warum gefreut aber nehme dass als > Erfahrungswert ;). Du gibst aber schnell auf. Nur weil einer (!) schreibt, dass es nicht geht. Aber dein Hauptproblem liegt woanders: Du musst deine Anwendung besser beschreiben.
Emanuel H. schrieb: > ich bin gerade dabei ein Echolot für ein Modellboot zu entwerfen Könnte man nicht einen "Fish Finder" hacken? MfG Klaus
Jochen schrieb: > Aber dein Hauptproblem liegt woanders: Du musst deine Anwendung besser > beschreiben. Die Anwendung ist ausreichend genau beschrieben. Das Verfahren kennt er noch nicht. Nun ja, nicht jeder kann ohne Grundlagen sofort ein Echolot bauen.
Klaus schrieb: > Emanuel H. schrieb: >> ich bin gerade dabei ein Echolot für ein Modellboot zu entwerfen > > Könnte man nicht einen "Fish Finder" hacken? > > MfG Klaus Eventuell geht auch der "HC-SR04-Ultraschall-Sensor": http://www.ebay.de/itm/HC-SR04-Ultraschall-Sensor-Ultrasonic-Module-Abstandsmessung-fur-Arduino-3242-/301675492086
@Jochen, nein Aufgeben tu ich es sicher nicht, ich habe mir nur fast schon bei dem LM567 gedacht dass der nicht funktioniert. Und eine koplette Empfangseinheit mit Bandpass und Trigger ist auch eine Herausforderung. Also ich möchte über einen Piezo-Wandler einen Schall (ca 10kHz) ins Wasser abgeben. Nach dem Senden soll dieser oder ein anderer Piezo als Empfänger dienen und die Schallwellen wenn sie wieder zurückkommen aufnehmen. Damit ich diese dann auswerten kann muss ich sicherstellen dass nur der vorher gesendete Frequenzbereich detektiert wird.Ich hatte da zuerst an einen Bandpass gedacht an den ein Trigger angeschlossen ist der bei einem gewissen Pegel schaltet und den Timer stoppt den ich beim lossenden gestartet habe. Nun habe ich eben den LM567 gefunden und dachte der kann mir die Arbeit, Bandpass und Trigger, abnehmen da er nichts anderes macht. Aber dafür muss er ausreichend schnell sein damit es nicht zu einer Verzögerung kommt. Ich hofffe das ist als Erklärung euasreichend. Und schon mal vielen Dank dass sich ein paar mit mir da vielleicht reindenken wollen.
Emanuel H. schrieb: > amit ich diese dann auswerten kann muss ich sicherstellen dass nur der > vorher gesendete Frequenzbereich detektiert wird. Das wird nicht klappen, weil sich Boote in der Regel bewegen: Dopplereffekt. Das wirst Du mit einrechnen müssen, damit Du weisst was zu detektieren ist.
Ich will nach unten die Tiefe messen. Es geht darum dass es nicht auf Grund läuft. Das Boot wird sich nur sehr langsam bewegen und der Schall ist ja im Wasser um einiges schneller somit denke ich kann ich diesen Effekt außen vor lassen. VG
Jochen schrieb: > Eventuell geht auch der "HC-SR04-Ultraschall-Sensor": Hast du nicht gelesen, daß es um unter-Wasser geht ? Hast du nicht die leiseste Ahnung, daß an Luft angepasste Sender und Empfänger in Wasser überhaupt nicht funktionieren wegen grober Fehlanpassung ?
@MaWin, hast du schon mal ein Echolot gebaut? Würde mich freuen wenn du mir nen paar Tipps geben könntest. VG
Emanuel H. schrieb: > Ich will nach unten die Tiefe messen. Es geht darum dass es nicht auf > Grund läuft. Bei irgendwas von 1400 m/s unter Wasser muss das bei einem Modellboot ohne grossen Tiefgang aber recht fix gehen. Grob gerechnet bei 10cm 70uS.
Der HC-SR04 könnte mit diesen Kapseln funktionieren (2. Post): http://forum.arduino.cc/index.php?topic=262044.0
rechnen wir mal mit ein bis zwei Meter. dann sind wir bei 714µS was schon messbar ist. Aber fix muss er schon sein dass stimmt.
Angehängte Dateien:
-

usmod.gif
26 KB
{kind=link}
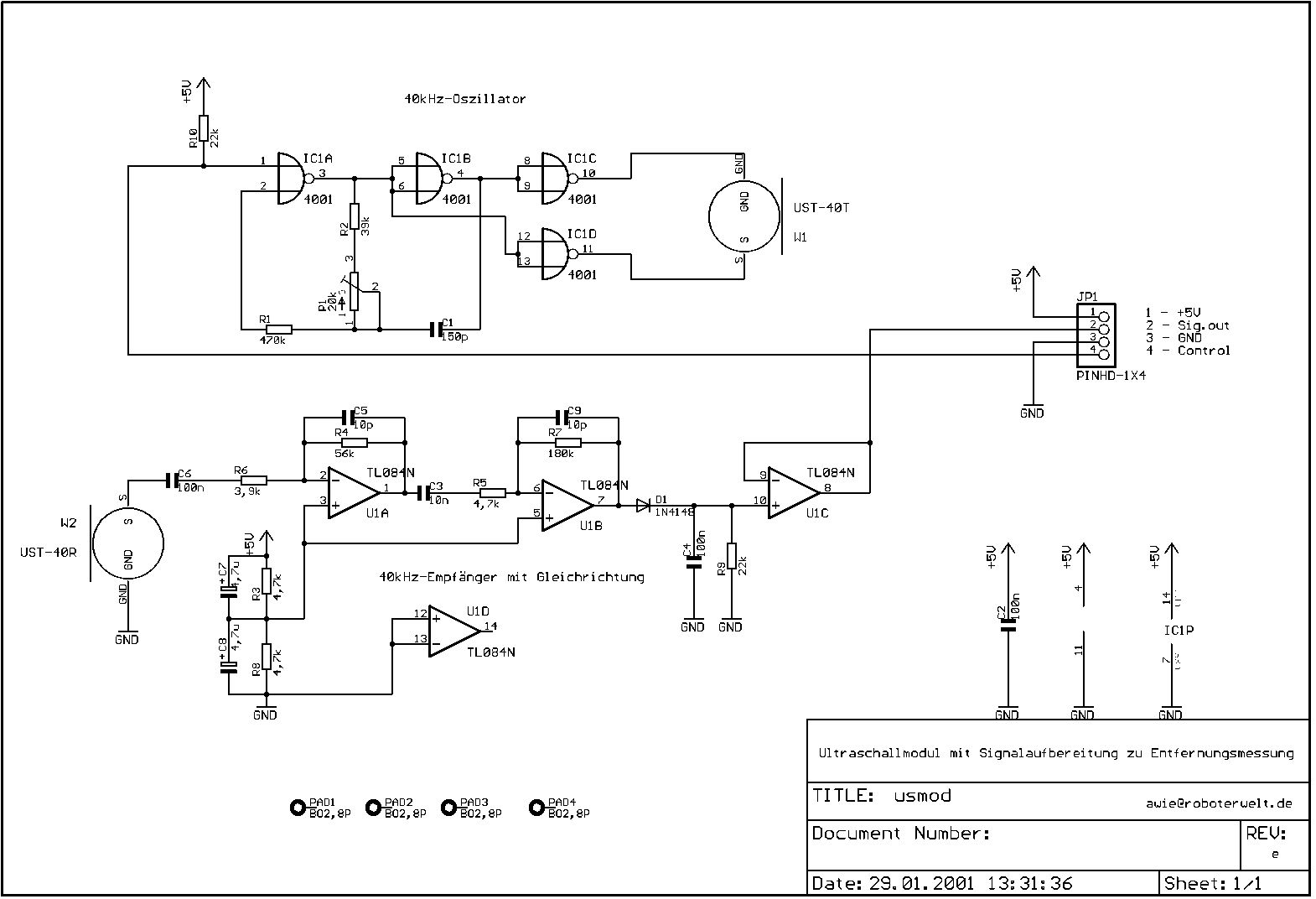
Emanuel H. schrieb: > Nun habe ich eben den LM567 gefunden und > dachte der kann mir die Arbeit, Bandpass und Trigger, abnehmen da er > nichts anderes macht. Aber dafür muss er ausreichend schnell sein damit > es nicht zu einer Verzögerung kommt. Der NE567 muss ja erst mit seiner PLL einrasten, um ein gültiges Signal auszugeben. Für deine kurzen Laufzeiten sind die Entfernungsmesser a là Roboter besser. Allerdings ist der Transducer genau das Problem - vor allem wg. der geringen geforderten Grösse. Die normalen Dinger sind für ein Modellboot einfach zu gross. Ich habe dir mal eine Schaltung für einen MC gesteuerten US Distanzmesser von der ehemaligen roboterwelt.de angehängt, der garantiert noch verbessert werden muss.
Vielen Dank für die Idee. Ich hatte mir überlegt das piezo Elemnt direkt mit dem Atmega anzusteuern aber so geht es auch. Nur sehe ich keine Filterung des Signals, also kommen mir alle Frequenze durch und werden dann Gleichgerichtet, oder habe ich da was übersehen?
Ich hatte auch schon die Idee das direkt an einen AD eingang zu hängen aber die AD Wandlung braucht ja auch seine Zeit, deshalb hatte ich an den Schmitt Trigger gedacht, der alles Analog macht.
Emanuel H. schrieb: > rechnen wir mal mit ein bis zwei Meter. dann sind wir bei 714µS was > schon messbar ist. Aber fix muss er schon sein dass stimmt. Die Rechnung finde ich beachtlich. Aus einer Strecke, die mal gerade auf einen Faktor 2 genau festgelegt ist, berechnest du eine Laufzeit auf drei Stellen genau - und das Ganze dann noch mit der Einheit einer Leitfähigkeit ;-( Wenn du allerdings berücksichtigst, dass der Schall vom Schiff zum Seeboden und wieder zurück muss, ergibt das bei 1 Meter Wassertiefe eine Laufzeit von 1,33ms. Fishfinder/Echolote, wie sie für Sportboote angeboten werden, arbeiten übrigens bei Frequenzen von 50 oder 200kHz. Aus Platzgründen (Gebergröße) ist dabei immer eine höhere Frequenz vorzuziehen, weil sich dann die Schallkeule besser bündeln läßt und man mit einem schwächeren Sendesignal ein vernünftiges Echo bekommt. Zu hoch darf man auch nicht gehen, weil dann die Dämpfung im Wasser zu hoch wird. Du solltest dir also Gedanken über die erforderliche Reichweite machen.
@Wolfgang, ich hab auch geschrieben dass die Frequenzangabe nur ein ca Wert, der sich aso noch verändern kann. Bei meiner Frage ging es ursprünglich um die detektion der zurückgestahlten Wellen. Wie lange die brauchen und das sie in Leitfähigkeiten ;) ankommen sei mal dahin gestellt. Da muss nur mein Atmega schnell genug sein. Aber viel Dank für die Info mit der Frequenz, überall lese ich andere Werte und werde die wahrscheinlich selber ausprobieren müssen. Deshalb bin ich Mathias sehr dankbar für die konstruktive Idee.
Ein großes Problem bei kurzen Entfernungen stellt das Nachschwingen der Piezolemente dar. Bei 40 kHz wird da die "totzeit" zwischen Senden und der Wieder-Empfangsfähigkeit recht groß. Für erste Versuche könnte man die Ultraschallgeber von Autos verwenden. Die sind wohl zumindest von der Außenseite her wasserdicht. Ihre Arbeitsfrequenz von 40kHz dürfte aber für Wasser ungeeignet sein. Vielleicht gehts aber mit Einzelimpulsen die durch einen Schlagstift an der Bootswandung erzeugt werden. Auch da: zuerst eine tote Zeit, in der der Boden zur Ruhe gekommen ist und der Empfänger für das Echo empfangsfähig ist. Erste Versuchsanordnung wäre: Eine Platte (Bootsinnenseite) mit einem Piezoelement als Empfänger belegen und ein Scope anschließen, das das ankommende Signal anzeigt. Die Platte mit der andren Seite (Bootaußenseite) auf Wasser legen (Schüssel oder Wanne) und schauen ab welcher oder bis welche Wassertiefe ein Antwortsignal ankommt, wenn man mit einem Schlagmechanismus auf die Platte klopft.
Deshalb habe ich auch an zwei Elemente gedacht die sich nicht gegenseitig beeinflussen außer bei der Detektion. Da habe ich dann das Problem nicht mit dem Nachschwingen.
Peter R. schrieb: > Ein großes Problem bei kurzen Entfernungen stellt das Nachschwingen der > Piezolemente dar. Bei 40 kHz wird da die "totzeit" zwischen Senden und > der Wieder-Empfangsfähigkeit recht groß. Mit meinem kommerzielle Sportboot Echolot komme ich auf minimal 50cm ran, Frequenz ist 200kHz. > Für erste Versuche könnte man die Ultraschallgeber von Autos verwenden. > Die sind wohl zumindest von der Außenseite her wasserdicht. Ihre > Arbeitsfrequenz von 40kHz dürfte aber für Wasser ungeeignet sein. Wasserdichtigkeit ist nicht das Problem. Wesentlich ist, dass die akkustische Impedanz des Gebers möglichst gut an die des Wassers angepaßt ist, damit die Energie überhaupt vom Geber in die Wassersäule geht und nicht direkt an der Grenzfläche reflektiert wird. Dem Wasser schaden die 40kHz ansonsten nicht. Echolote gibt es durchaus mit Frequenzen zwischen 17kHz und 700kHz (z.B. EA600 von Kongsberg) - je nach Einsatzzweck.
Wolfgang schrieb: > zwischen 17kHz und 700kHz (z.B. EA600 von Kongsberg) Korrektur: 12kHz bis 710kHz. Bei 710 kHz versprechen die eine Tiefenmessung ab 10cm.
So ein Fishfinder kostet keine 30 Steine. http://www.ebay.de/itm/100m-Sonar-Fish-Finder-Fischfinder-ORTUNG-ECHOLOT-Alarm-Breite-Transducer-/331524407127?hash=item4d3064ff57 Da muß man doch nicht rumspekulieren, den kauft man, misst nach was er macht und hat für das eigene Modell gleich einen brauchbaren Transducer (oder auch mehr). MfG Klaus
Der Piezo ist abef sicher für die Frequenz des Fishfinder abgestimmt und lässt sich vermutlich nicht so trivial erhöhen. Und 0,7m Wassertiefe unter dem Kiel ist halt eher was für ausgewachsene Boote, nicht Modellbau. Die 10cm bei 710kHz hören sich gut an, aber ob das auch dieser Piezo bringt???
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.