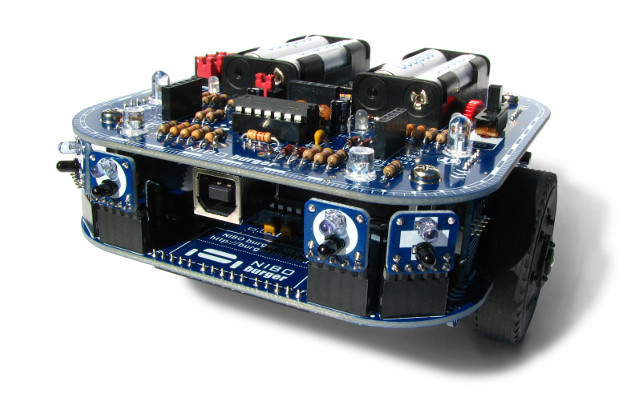
Hallo zusammen! Für unseren neuen Roboterbausatz NIBO burger (ab Herbst 2015) suchen wir 8 Testpersonen, die gerne über Ihre Erfahrungen beim Bau und bei der Programmierung des Roboters berichten wollen. Der Roboterbausatz wird gestellt und darf nach dem Test behalten werden. Bewerbungen mit kurzer Beschreibung der Vorkenntnisse bitte bis zum 18. September 2015 per E-Mail an: burger-test@nicai-systems.com (Die Adressen werden wir selbstverständlich vertraulich behandeln und auf keinen Fall für Werbezwecke, sondern nur für die Benachrichtigung der Testpersonen verwenden.) Weitere Informationen zum NIBO burger demnächst unter http://burger.nicai.eu
Angehängte Dateien:
-

NIBOburger.jpg
82 KB
Hmm Interesse hätte ich. Allerdings solltest du etwas zur Hardware verraten. Was für einen µC habt ihr verwendet? Ansonsten weiß man ja gar nicht was man da zu Programmieren bekommt und ob man dazu fähig ist. Und wie stellt ihr euch seinen Erfahrungsbericht vor? Videotagebuch oder reicht ein dreizeiliger text? Lg
Auf dem Roboter ist ein Atmel AVR ATmega16A - aufpeppen kann man ihn bis zum ATmega1284. Programmiert wird er in C oder C++ mit der NiboRoboLib, als Entwicklungsumgebung eignet sich die Arduino-Oberfläche, unser Online Compiler http://Roboter.CC oder auch das AVR Studio von Atmel. Videotagebuch als Erfahrungsbericht ist natürlich spitze, drei Zeilen etwas dürftig... ;-)
Hallo, -bitte nicht mehr bewerben- die NIBO burger für die Testpersonen sind jetzt alle unterwegs - vielen Dank auch nochmal an die, die wir leider nicht berücksichtigen konnten! Die Webseite mit Bauanleitung, Tutorial etc. ist jetzt auch fast fertig: http://burger.nicai.eu -workwind-
Bisher habe ich ja dieses Forum nur passiv genutzt. Aber da ich nun einer der Tester für den NIBO burger wurde dachte ich mir, dass ich den Testbericht nun auch an dieser Stelle veröffentliche. Hallo daher erstmal von meiner Seite. Vielleicht zu meinem Hintergrund: Ich bin Lehramtsstudent mit den Fächern Mathematik und Informatik an der RWTH und arbeite dort auch als HiWi im Schülerlabor Informatik (Infosphere). In meiner Freizeit und auch auf der Arbeit Löte ich hin und wieder, so dass ich mich als Fortgeschrittenen Löter ansehen würde. Zudem habe ich den Vorgänger des NIBO burgers das NIBObee bereits im Rahmen meiner Arbeit gelötet jedoch selber nicht dafür Programmiert. Dementsprechend werde ich auch einige Vergleiche zu meinen Erfahrungen von damals ziehen. Dieser erste Überblick beschreibt den Hardware-Teil - nach einigen Tests und eigenen Programmen werde ich einen Softwareteil ergänzen... Erst einmal die Informationen im Überblick: Zeitaufwand(Löten): ca 4h (habe etwa 4,5 gebraucht mit Fotos und Notizen machen) Anzahl der Lötstellen: 591 63 Widerstände 14 Dioden 23 Kondensatoren 10 Transistoren 25 LEDs/Sensoren 3 Taster 1 Schalter 15 Stecker 21 Buchsen 5 Jumper 4 IC-Sockel 2 Motoren 2 Platinenteile 2 Batteriehalter 1 USB-Buchse 1 Spannungsregler 1 Quarz An Werkzeug und Material wird zusätzlich folgendes benötigt: Lötkolben & Lötzinn Seitenschneider Zange Kreuzschraubendreher Ein Hammer wird noch empfohlen, habe ich persönlich jedoch nicht benötigt. Der NIBO burger kommt in einer ansprechenden Verpackung mit den benötigten Bauteilen, einer Schablone für den Aufbau und zur Kalibrierung sowie einer CD mit der benötigten Software und der Anleitung. Zudem gibt es dort auch Links zu Tutorials und Programmierumgebungen. Dazu aber mehr im zweiten Teil. Die Anleitung enthält neben der Anleitung selbst auch eine generelle Anleitung wie man lötet. An sich eine gute Idee, da das Projekt auch für Schulklassen und Anfänger ausgelegt ist. Kleiner Kritikpunkt: die Löttemperatur wird mit 370-400° angegeben, jedoch ist diese vom Lötzinn abhängig - in meinem Fall reichten so 300°, was denke ich schonender für die Bauteile ist. Die wichtigste Regel für die Anleitung: Wer lesen kann ist klar im Vorteil... Bereits am Anfang werden die LEDs kurz beschrieben, die sich leider ziemlich ähnlich sehen. Diese Info sollte man sich merken, da sie später noch einmal wichtig wird. Die Anleitung ist gut bebildert und führt einen so durch den Lötprozess. Was man direkt am Anfang positiv bemerkt (im Vergleich zum NIBO bee) die Plätze für die Wiederstände auf dem Board sind übersichtlich durchnummeriert und können so leicht gefunden werden. Auch gut durchdacht: Die Schritte in der Anleitung sind prinzipiell nach der Größe der Bauteile sortiert. Leider wird dies nicht ganz konsequent durchgezogen: Die Zener-Dioden sind kleiner als die Widerstände, sollen jedoch später festgelötet werden. Das gleiche Problem ist beim anlöten der weißen LEDs und beim Anlöten der Blauen LEDs. In den Fällen kann man das ganze noch durch das Umbiegen der Beinchen kompensieren - schwieriger wird es beim Anlöten der Buchsen: Diese sind kleiner als die vorher angelöteten Kondensatoren und der Schalter und Fallen so herraus. Lösen lässt sich dies indem man das Borad mit den Buchsen auf eine höhere Kannte legt. Weitere (kleine bis sehr kleine) Optimierbarkeiten in der Anleitung: 1. Für die Zenerdioden hätte man als Abbildung - wenn man schon eine symbolische Darstellung verwendet - sich mehr am Original mit schwarzem (statt weißem) Balken orientieren können. 2. Bei den Photo-Transistoren wird der Standardsatz "Das kurze Beinchen muss in das rechteckige Lötpad!" auch wieder aufgegriffen, obwohl an der Stelle beide Beinchen auf Pads gelötet werden. Das wird zwar nachher aufgeklärt, so fällt jedoch auf, wenn man fleißig Text kopiert ;) 3. Bei den LEDs wird ausgerechnet da, wo man noch die zwei Dioden-Typen unterscheiden müsse (zwischen leicht lila und klar) nicht auf den Unterschied eingagegen. Hat man nun diese bereits verlötet und kommt zum anderen Typ steht dort eine Beschreibung wie sie aussehen soll - so kann man höchstens noch feststellen, dass man sich vorher geirrt hat. 4. Die LEDs sind mit einem ungünstigen Schattenwurf fotografiert, so dass man die gekürzte LED erst auf den zweiten Blick erkennt. 5. Es wird vergessen zu erwähnen, dass die Taster festgelötet werden müssen. 6. Und bei diesem Punkt gehts dann schon zur Hardware über: Die Batteriefächer kann man nur in eine Richtung einsetzten - es wird jedoch ausführlich erklärt wie man auf die Polung zu achten hat. Auch seltsam auf dem Board: Warum befinden sich auf dem Board ein zweiter Lötanschluss für die Batteriefächer, wenn diese gar nicht benutzt werden? 7. Die sonst auf dem Board sehr positiv auffallende Zählung der Widerstände wird bei den Jumpern plötzlich umgedreht. So sucht man unter Umständen im falschen Bereich des Boards nach den Anschlüssen. Ein mir persönlich passiertes missgeschick der Kategorie "Wer lesen kann ist klar im Vorteil...": Der IC zur Spannungsregelung sieht aus wie ein Transistor, Wenn man da nach ddem Bild geht und nun im Päckchen mit den Transistoren sucht, so findet man ihn natürlich nicht. Zu finden ist er versteckt im Schaumstoff bei den anderen ICs. Nach dem Löten werden die ICs eingesteckt und die zwei Etagen des NIBO burgers miteinander verschraubt. Das tolle: Auf den ICs sind direkt schon Testprogramme installiert, mit denen man nun die gerade zusammengebaute Hardware testen kann. Fazit: Der NIBO burger ist von der Hardware-Seite (vor allem im Vergleich zum Vorläufer NIBObee) gut struckturiert, die Anleitung sehr detailiert und somit ist es auch für Anfänger geeignet. Ob es als aller erstes Lötprojekt geeignet ist muss mman aufgrund des Umfangs für sich entscheiden - machbar wäre es. Es hat mir auf jeden Fall Spass gemacht dieses Projekt zu löten und zu testen und ich freue mich schon zur Programmierung überzugehen. Für diejenigen, die sich dieses Projekt nun vorgenommen haben noch einige Tipps: 1. Lasst am Anfang die Seiten-Platinen zusammen, so liegen die Buchsen die man festlöten muss automatisch Flach auf der Plattine auf 2. Beim Festlöten der Buchsen auf der Bodenplatine braucht man sich auch keine Gedanken ums Flache aufliegen zu machen, wenn man ordentlich die Beinchen abgeschnitten hat. 3. Wenn man bei IC3 die Beinchen zurecht biegt, so hat dieser bereits den richtigen Abstand zum Board. 4. Über den Quarz muss man sich auch keine Gedanken machen: dreht man das Board auf den Kopf, so sorgen die daneben liegenden Kondensatoren für den richtigen Abstand.
Angehängte Dateien:
-

0_-_Box.jpg
130 KB -

1_-_Inhalt.jpg
150 KB -

3_-_Untersschied_LED.jpg
140 KB -

4_-_Sensoren.jpg
100 KB -

5_-_Schablone.jpg
75 KB -

6_-_Bestueckt_Oben.jpg
210 KB -

7_-_Bestueckt_Unten.jpg
150 KB -

8_-_Ansicht_Unten.jpg
120 KB -

9_-_Ansicht_Fertig.jpg
180 KB



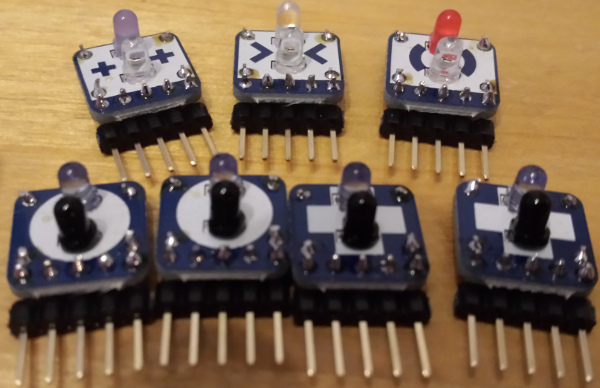
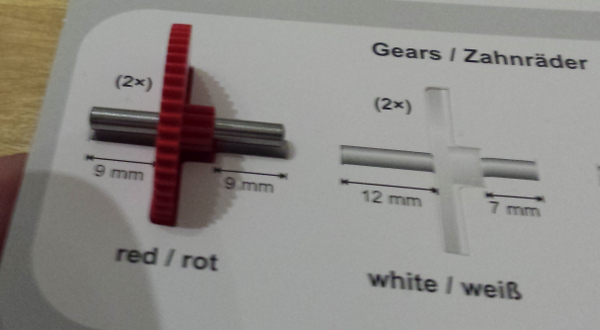
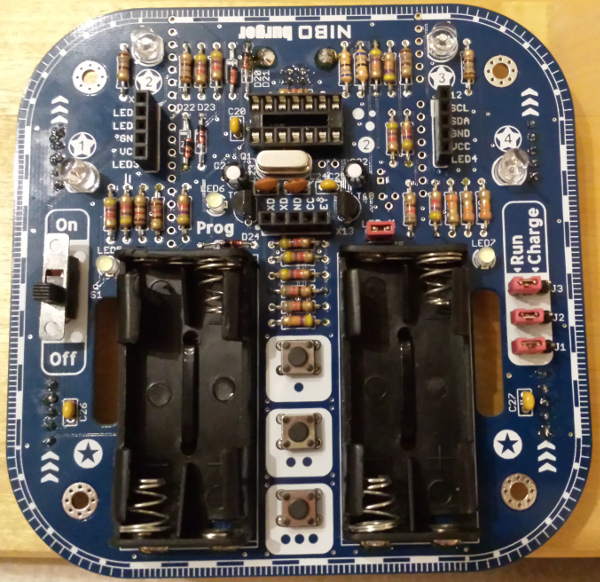
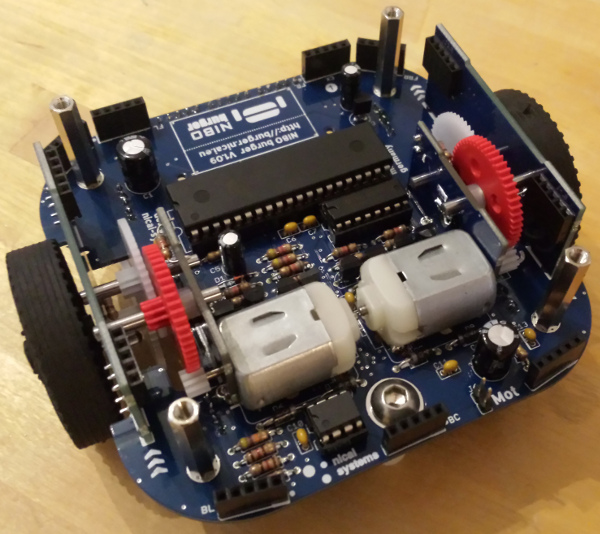
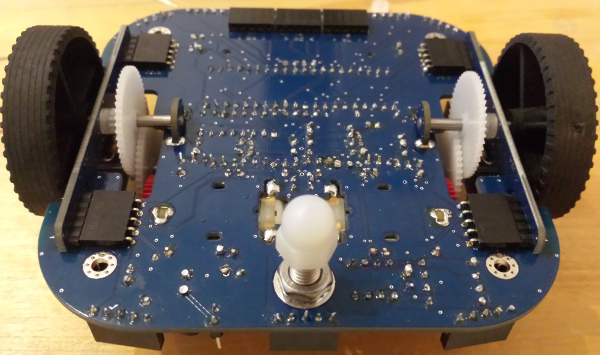
Hier noch ein Paar Bilder zum Projekt (bei Bedarf habe ich auch noch die Zwischenschritte fotografiert): 1. Die Box 2. Der Inhalt in der Übersicht 3. Die schwer unterscheidbaren LEDs 4. Die Sensoren, die man an unterschiedliche Steckplätze Stecken kann 5. Die Schablone um zu testen, ob man die Zahnräder richtig Montiert hat 6... Fertig gelötete Platinen
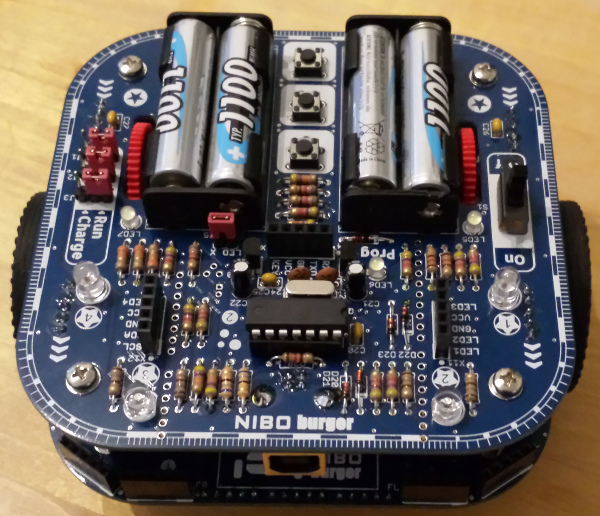
Erstmal noch ein Nachtrag zur Hardware: 1. Der Roboter quietscht erst einmal sehr laut, wenn man ihn jedoch wie empfohlen einfettet wird er deutlich leiser. 2. Mir wurde gesagt, dass ich eher zu den schnellen Lötern gehöre, daher sollte man auf meine angegebene Zeit noch etwas drauf schlagen. Nun zur Programmierung: Auf der beigelegten CD zum NIBO burger befindet sich die Benötigte Software, eine Klassenreferenz, eine Anleitung zur Installation und zur Programmierung und ein Link zu einem Online-Crashkurs Programmieren. Dieser richtet sich wirklich an Anfänger und wäre ganz gut, jedoch wird zumindest bei mir im Firefox und im Chrome der Text am Rand abgeschnitten. Die Programmierung kann in verschiedenen Umgebungen durchgeführt werden - ich persönlich habe mich aus Beruflichen gründen für die Arduino-Umgebung entschieden, für die auch eine eigene Anleitung existiert. Sowohl in der eigenen Anleitungsdokument zur Installation als auch in der Programmieranleitung sind ausführliche Beschreibungen, wie man mit Hilfe eines Installers die entsprechenden Programme installiert. Wie gut das ganze funktioniert kann ich nicht sagen - ich benutze Linux. Hierfür findet sich keine Installationsanleitung, jedoch ein Ordner auf der CD wo alle benötigten zusätzlichen Pakete als lustige kleine Tar-Balls zum selber Compilieren bereitstehen. Einfacher ist es hier die Pakete schnell aus den Repositories, z.B. per Terminal zu installieren, falls sie noch nicht vorhanden sind: sudo apt-get install avrdude sudo apt-get install avr-libc sudo apt-get install binutils sudo apt-get install gcc Im Falle des Arduinos dann noch die drei Ordner aus dem Verzeichnis arduino16 (oder für ältere Versionen nur arduino) in den Arduino Order (meist im Homeverzeichnis) kopieren. So findet er die NIBOburger.h jedoch noch nicht, sondern man muss erst noch alles aus dem src Ordner eine Ebene höher kopieren. Damit nicht genug: In die Niboburger.h müssen alle Zeilen mit einem include aus der .cpp Datei kopiert werden und zwar zu der bereits bestehenden include "niboburger/color.h" Datei. Sollte während des Übertragens noch ein Problem mit den Rechten auftauchen empfehle ich diesen Artikel: [[AVRDUDE#Aufruf_unter_Linux_als_user_.28non-root.29]] Nachdem man diesen Kampf hinter sich hat kann man nun an die Programmierung gehen: Im typischen Arduino-Stil wird in der Setup Methode zunächst mit der Methode NIBOburger.begin() der NIBO burger initialisiert. Zusätzlich gibt es für die Startüberprüfung des burgers noch die Methode NIBOburger.checkVoltage() die dazu führt, dass bei niedrigem Akkustand der burger anfängt ein SOS Signal zu senden... Das war bei mir direkt der Fall und da kommen wir zu einem hardwareseitig positivem Punkt: der NIBO burger kannn über USB aufgeladen werden - hierzu muss man lediglich 3 Jumper von run auf Charge setzen. Statt des gewohnten HIGH und LOW wird in den Programmcodes ON und OFF für LEDs bzw A B C und a b c für Taster-Events verwendet. Die Quellcodes in der Anleitung sind Teilweise als Bild gespeichert - ein schnelles kopieren einer Zeile ist so nicht möglich. Die Quellcodes der Beispiele sind jedoch auch auf der CD enthalten, genauso wie der Code der Vorinstallierten Test-Programme In vielen kleinen Projekten wird der User nun in der Anleitung in die einzelnen Funktionen des NIBO burgers eingeführt, was sich insgesamt recht angenehm liest. An manchen Stellen werden jedoch Sprünge gemacht, welche für einen Anfänger bestimmt nicht einfach nachzuvollziehen sind: Zum Beispiel wird in einem Beispiel ohne Erklärung der Wert On/OFF durch einen Vergleich ersetzt. Auch gibt es von den Anforderungen plötzlich einen riesigen Sprung, wenn es zur Hindernis Erkennung kommt und gleichzeitig Funktionen und Enumerations eingeführt werden - da kann einen auch der Online-Test nicht mehr retten ;) Insgesamt hat wird dem NIBO burger eine ganze Reihe von Funktionen an die Seite gestellt neben den Funktionen und Methoden zur Steuerung und Auslesen der Sensoren (Abstands-, Farb- und Geschwindigkeits-Erkennung), LEDs und Motoren auch Klassen zum Umgang mit Farben in RGB- und HSV-Format und zur Generierung von Zufallszahlen mit Hilfe der Sensorwerte etc. Die Funktionen sind für die fortgeschrittenen Programmierer auch in einer Tabelle übersichtlich dargestellt und auch für die die sagen Funktionen sind mir zu langweilig - ich arbeite lieber mit Ports und Pins gibt es hier eine Übersicht welcher Ausgang wohin verbunden ist. Insgesamt muss ich sagen, dass das Fazit der Software-Seite zwar noch positiv ausfällt, jedoch im Vergleich zur Hardware einige Macken vorhanden sind. (Vielleicht betrifft es jetzt nur die Linux-User, aber es war kein freudiger Einstieg und hat am Anfang den ein oder anderen Nerv gekostet). Zusammengefasst ist es aber ein sehr nettes Projekt und ich persönlich hab meine Freude daran. Der Burger wird wohl in nächster Zeit öfters bei mir durch die Wohnung fahren (neues Haustier ;) ) und im Laufe der Zeit sicherlich noch erweitert...
Dieser Tim Ortmann (rimtimtim) ist doch ganz offensichtlich ein angestellter Promoter für dieses Roboterdings. Seine ellenlangen Ausführungen sind sind in meinen Augen nichts als Spam.
Bastler schrieb: > Dieser Tim Ortmann (rimtimtim) ist doch ganz offensichtlich ein > angestellter Promoter für dieses Roboterdings. Wie kommst du darauf? Nicai hat das schon mal gemacht, dass sie Tester gesucht haben. > Seine ellenlangen Ausführungen sind sind in meinen Augen nichts als > Spam. Seine ellenlangen Ausführungen sind das mindeste, was man von einem Tester erwartet, dem man einen Bausatz zum ausprobieren schenkt. Dem Hersteller geht es genau um derartige Erfahrungsberichte.
Angehängte Dateien:
-

loetstellen.png
91 KB

Tim O. schrieb: > In meiner Freizeit und auch auf der Arbeit Löte ich hin und wieder, so > dass ich mich als Fortgeschrittenen Löter ansehen würde. Sicher?
Dann sag ich sorry, wenn ich daneben lag :)
Karl H. schrieb: > Seine ellenlangen Ausführungen sind das mindeste, was man von einem > Tester erwartet, ich hätte mir für einen Tester mehr Unabhängikeit resp. Kritik gewünscht, AAA Zellen? bitte, da gehören IMHO AA Zellen rein, im Robo2 ja vorgesehen. Sonst ein schöner Bericht und hilfreich, liest sich eher trotzdem wie eine Werbemaßnahme was mir etwas das "Habenwollen" raubt.
Herbert schrieb: > Tim O. schrieb: >> In meiner Freizeit und auch auf der Arbeit Löte ich hin und wieder, so >> dass ich mich als Fortgeschrittenen Löter ansehen würde. > > Sicher? Bei den Fotos sind mir auch als erstes diese undefinierbaren Lotklumpen aufgefallen, die Tim O. irgendwie auf die armen Bauteile aufgebracht hat. Das ist von fortgeschrittenen Lötkenntnissen SEHR weit entfernt. Ich empfehle dringend, die folgenden Videos (ja, die gesamte Serie!) aufmerksam zu betrachten: https://www.youtube.com/watch?v=0SnOW2VdCTI https://www.youtube.com/watch?v=b15MMzb_GWw Es spricht sehr für den Bausatz, dass die Schaltung offenbar trotzdem funktioniert.
Herbert schrieb: > Tim O. schrieb: >> In meiner Freizeit und auch auf der Arbeit Löte ich hin und wieder, so >> dass ich mich als Fortgeschrittenen Löter ansehen würde. > > Sicher? Nein nicht ganz sicher bin ich mir nicht ;) Ich weiß, dass da einige Lötklumpen sind hab ich auch schon mal besser hin bekommen (Vielleicht ist ne dicke Lötspitze ne ausrede;) - ist eine meiner zukünftigen Investitionen). Danke da auch an Andreas Schweigstill werde ich mir mal in Ruhe ansehen bin da immer Froh wenn mir einer was empfehlen kann damit ich mich weiterbilden kann. Meine Einstufung als fortgeschrittener Löter geschah mehr aus dem Vergleich mit Einsteigern heraus, die angeblich beim NIBObee bereits in der Grundschule zu finden sind. Also nen richtiger Anfänger bin ich also nicht mehr, was meine angegebene Zeit sonst ziemlich verfälschen wurde. Mir ist aber auch klar, das ich weit vom Profibereich entfernt bin. In den Burger kommen tatsächlich AAAs - ist kein Fehler hab extra nochmal nachgeschaut. Dabei noch ein Nachtrag zur Hardware: Die Sensoren verführen dazu sie als Greiffläche zu nutzen. Dann noch kurz zum Vorwurf angestellter Promoter zu sein: Ich bin tatsächlich Student an der RWTH -> wer Spass dran hat kann mal auf der Seite des InfoSphere gucken, da bin ich als HiWi gelistet (Oder kann mir in einer Vorlesung ne Pizza vorbei bringen;)). Aber natürlich werde ich von Nicai in Form des Roboters bezahlt. Ich ging davon aus, dass das aus dem Anfang des Threads hervorging. Edit: (Wobei ich natürlich nicht dafür bezahlt wurde unkritisch zu sein, sondern dafür das ich überhaupt zu meinem Test was schreibe...) Nicht desto trotz ging ich davon aus das ganze relativ kritisch betrachtet zu haben. Vielleicht war es aber auch die Euphorie ausgewählt worden zu sein ;). Habe bis jetzt auch nur zwei größere Bausätze zusammengebaut und das war der, den ich bis nun am besten fand - ich wollte durch meine Euphorie keinen davon abhalten. Gruß Tim
Tim O. schrieb: > Ich weiß, dass da einige Lötklumpen sind hab ich auch schon mal besser > hin bekommen (Vielleicht ist ne dicke Lötspitze ne ausrede;) - ist eine > meiner zukünftigen Investitionen). Diese Klumpen sehen eher danach aus, als wäre Deine Lötspitze eher *zu dünn*, d.h. sie schafft es nicht, die Wärme des Lötkolbens in die Lötstelle einzubringen. > Dann noch kurz zum Vorwurf angestellter Promoter zu sein: Es gibt hier immer wieder Forenstänkerer, denen jegliches gewinnorientierte Handeln zuwider ist. Zwar gibt es überall auch gefälschte Rezensionen, so dass man schon vorsichtig sein sollte, aber den Eindruck hatte ich bei Deinem ausführlichen Bericht nicht. Ich erwäge ernsthaft, solch einen Bausatz zu kaufen, um meiner Frau endlich einmal das Elektronikbasteln einzutrichtern. Mechanik bereitet ihr schon viel Spaß, aber um den Lötkolben macht sie noch einen viel zu großen Bogen.
Andreas S. schrieb: > Es gibt hier immer wieder Forenstänkerer, tut mir leid so sollte das nicht rüberkommen.
Noch ein Nachtrag zur geliefertern Software: Habe gerade noch die Funktionen für die Farbsensoren einzeln getestet: Die in der Übersicht angegebenen Funktionen getLC() und getRC() existieren nicht. Man kann mit den Vorgegebene Funktionen also entweder alle, oder nur einzelne Sensoren ansteuern. Die Kombinationen aus mittlerer LED und Äußerem Sensor existiert so nicht - müsste man sich also selber nachbauen. Die Softwareseite hat also in der weiteren Ansicht weitere Macken... :(
Da hab ich wohl die Implementation des Wrappers für C++ vergessen... folgendes sollte alternativ auch gehen: SurfaceSensor.get(SURFACE_CL)
hallo, ich baue in meiner freizeit roboter, würde sehr gerne mitmachen!!! das wäre echt cooooooooool
Ich finde die Vorstellung des Nibo Burger von Tim eigentlich sehr gut. Eine ergänzende Vorstellung findet ihr hier: http://www.mikrocontroller-elektronik.de/nibo-burger-der-neue-roboter-bausatz/ Ein Video folgt!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.