Hallo! Ich möchte folgendes realisieren. Ein (Modell)- Fahrzeug bzw ein Teil des Fahrzeugs bewegt sich parallel zu einer Wand mit einer Geschwindigkeit bis ca. 30 km/h. Nun möchte ich während des vorbei Fahrens messen wie nah ( im Bereich von 1-10 cm) das Fahrzeug vorbei gefahren ist. Die Oberflächen und Aufbauten der Fahrzeuge können sich unterscheiden, daher habe ich an Ultraschall Sensoren (im speziellen an den HC-SR04) gedacht und mir ein paar zum testen zugelegt. In endgültigen Aufbau sollen im system ( Basis soll uC aus der atmete Reihe sein) bis zu 30 - 40 solcher Sensoren sein , wobei die einzelnen Messpunkte bis zu 10m entfernt sein könnten. Bin ich mit den Sensoren auf dem richtigen Weg oder gibt es andere/ bessere für diesen Einsatzzweck?
M. H. schrieb: > gibt es andere/ > bessere für diesen Einsatzzweck? Ich kenne den Einsatzzweck nicht und schon gar nicht die geforderte Genauigkeit, aber ich würde auch mal an Fahrbahnsensoren oder Videokameras denken.
Die genaugikeit sollte bei ca. 1cm liegen. An der Fahrbahn kann nichts verändert werden und sollte Kostenseitig im kleineren Rahmen bleiben .
Laser und Kamera. Aus dem rückgestrahltem Winkel kann man den Abstand berechnen.
M. H. schrieb: > Ultraschall Sensoren Schlechte Wahl wegen Dopplereffekt und geringe Ausbreitungsgeschwindigkeit. Besser Laserentfernungsmesser, noch besser Radarsensor (weniger Anfällig gegen Staub/Nebel). Dergleichen wird auch von Daimler für Abstandssensoren verwendet.
Hallo Radarsensoren fallen heraus, die können nicht den geforderten Mindestabstand bringen. Für Abstandsmessung braucht es FMCW Sensoren, welche umständlich (FFT) auszuwerten sind. Alles unterhalb des 1. Maximums kann nicht erfasst werden. Außerdem ist der Mindestabstand abhängig von der Frequenz des Radars. Weiterhin sind FMCW Sensoren nicht gerade günstig und Hochfrequente FMCW Sensoren (kleine Abstände) bekommt man kaum zu kaufen. Weiteres Manko: Die Bauphysik. Wände unterschiedlichen Typs erzeugen ein jeweils eigenes Echo. Liegen im Fussboden Estrichmatten, wird es wegen der Reflexionen richtig lustig. CW Radarsensoren können nur die Geschwindigkeit ermitteln und fallen sowieso raus. Aber die sind wenigstens billig im Vergleich zu FMCW.
NemesisMF schrieb: > Weiteres Manko: Die Bauphysik. Wo befindet sich der Sensor? -Fahrzeug? -Wand? Das geht aus deiner Beschreibung nicht sicher hervor.
M. H. schrieb: > Die genaugikeit sollte bei ca. 1cm liegen. Andere Idee: Eine Reihe von Fotodioden in die Fahrbahn. Abstand 0,5cm. Die, die vom Reifen bedeckt werden liefern einen Dunkelimpuls.
Der Dopplereffekt sollte nicht allzu problematisch sein. 30 km/h entspricht etwa 8 m/s 336 m/s sind davon recht weit entfernt. Darüber hinaus erfolgt die Messung ja zur Seite (90°) und nicht in Fahrtrichtung (+) bzw. nach hinten (-). Natürlich kann es, bei nicht parallelen Flächen zu "Verzerrungen" kommen.
NemesisMF schrieb: > Radarsensoren fallen heraus, die können nicht den geforderten > Mindestabstand bringen. Für Abstandsmessung braucht es FMCW Sensoren, > welche umständlich (FFT) auszuwerten sind. Radarsensor-ICs gibts für Frequenzen bis 122GHz. M. H. schrieb: > In endgültigen Aufbau sollen im system ( Basis soll uC aus der atmete > Reihe sein) bis zu 30 - 40 solcher Sensoren sein , wobei die einzelnen > Messpunkte bis zu 10m entfernt sein könnten. Oben einen Punkt auf die Autos kleben (für den Kontrast und einfachere Auswertung), Videokammera drüberhängen und mit OpenCV auswerten? Zur Auswertung brauchts dann aber MINDESTENS einen Raspberry, eher was noch schnelleres. Amateur schrieb: > 30 km/h entspricht etwa 8 m/s > 336 m/s sind davon recht weit entfernt. Dennnoch ekelhaft, ich würde optische Sensoren verwenden, die Abstandssensoren von Sharp sind idiotensicher anzusteuern: den Sensor mit 5V versorgen und er leifert eine zum Abstand (in guter Nächerung) proportionale Spannung am Ausgang.
NemesisMF schrieb: > Alles unterhalb des 1. > Maximums kann nicht erfasst werden. Willst Du mehrere Fahrzeuge gleichzeitig erfassen? Dann Kamera von oben.
Amateur schrieb: > 30 km/h entspricht etwa 8 m/s > 336 m/s sind davon recht weit entfernt. Plus Geschwindigkeit des Schall-Mediums (Windböe). es ist also ein ständig wechselnder Schrägeinfall zu bestimmen und zu korregieren. Sonst wird`s nix mit 10 mm Genauigkeit.
All zu schwer werden die Autos ja nicht sein. Wie wäre es einfach eins davon: http://de.rs-online.com/web/p/potenziometer/7081523/ auf die Strasse zu kleben? Dann kannst Du recht genau messen wo das Rad ist und die Auswertung ist mehr als simpel.
M. H. schrieb: > Ein (Modell)- Fahrzeug bzw ein Teil des Fahrzeugs bewegt sich parallel > zu einer Wand mit einer Geschwindigkeit bis ca. 30 km/h. > Nun möchte ich während des vorbei Fahrens messen wie nah ( im Bereich > von 1-10 cm) das Fahrzeug vorbei gefahren ist. Auf den Winter warten und einfach die Spuren im Schnee vermessen.
Ich denke es geht darum...: RC Driftstrecke... Auswertung vom Wandabstand zur Punkteberechnung. Warum nehmt ihr nicht solche Schwingstäbe und wertet diese bei Bewegung aus? Da läßt sich dann nämlich auch die Geschwindgkeit anhand der Pendelstärke berechnen. So habe ich das immer auf den einschlägigen Strecken gesehen.
Möglicherweise kann man ja auch einen schrägen Laser nehmen und das gute, alte Prinzip des Schnittbildentfernungsmessers, mit einem Zeilensensor, reaktivieren.
Amateur schrieb: > Möglicherweise kann man ja auch einen schrägen Laser nehmen und das > gute, alte Prinzip des Schnittbildentfernungsmessers, mit einem > Zeilensensor, reaktivieren. ist inzwischen auch mei Favourit, wobei man neben dem Schrägstrahler noch einen waagerecht-Strahler zur referenz benötigt
Sensorix schrieb: > M. H. schrieb: >> Ultraschall Sensoren > > Schlechte Wahl wegen Dopplereffekt Es wird quer zur Bewegungsrichtung gemessen. Außerdem verändert der Dopplereffekt nur die Frequenz, aber nicht die Laufzeit des Signals. > und geringe Ausbreitungsgeschwindigkeit. Bei einem Abstand von bis zu 10 cm scheint mir das kein Problem zu sein. > Besser Laserentfernungsmesser, noch besser Radarsensor (weniger Anfällig > gegen Staub/Nebel). Dergleichen wird auch von Daimler für > Abstandssensoren verwendet. Aber nicht im Bereich 1 bis 10 cm. Für diesen Bereich nutzt auch Daimler Ultraschallsensoren.
Angehängte Dateien:
-

Skizze.Png
12 KB
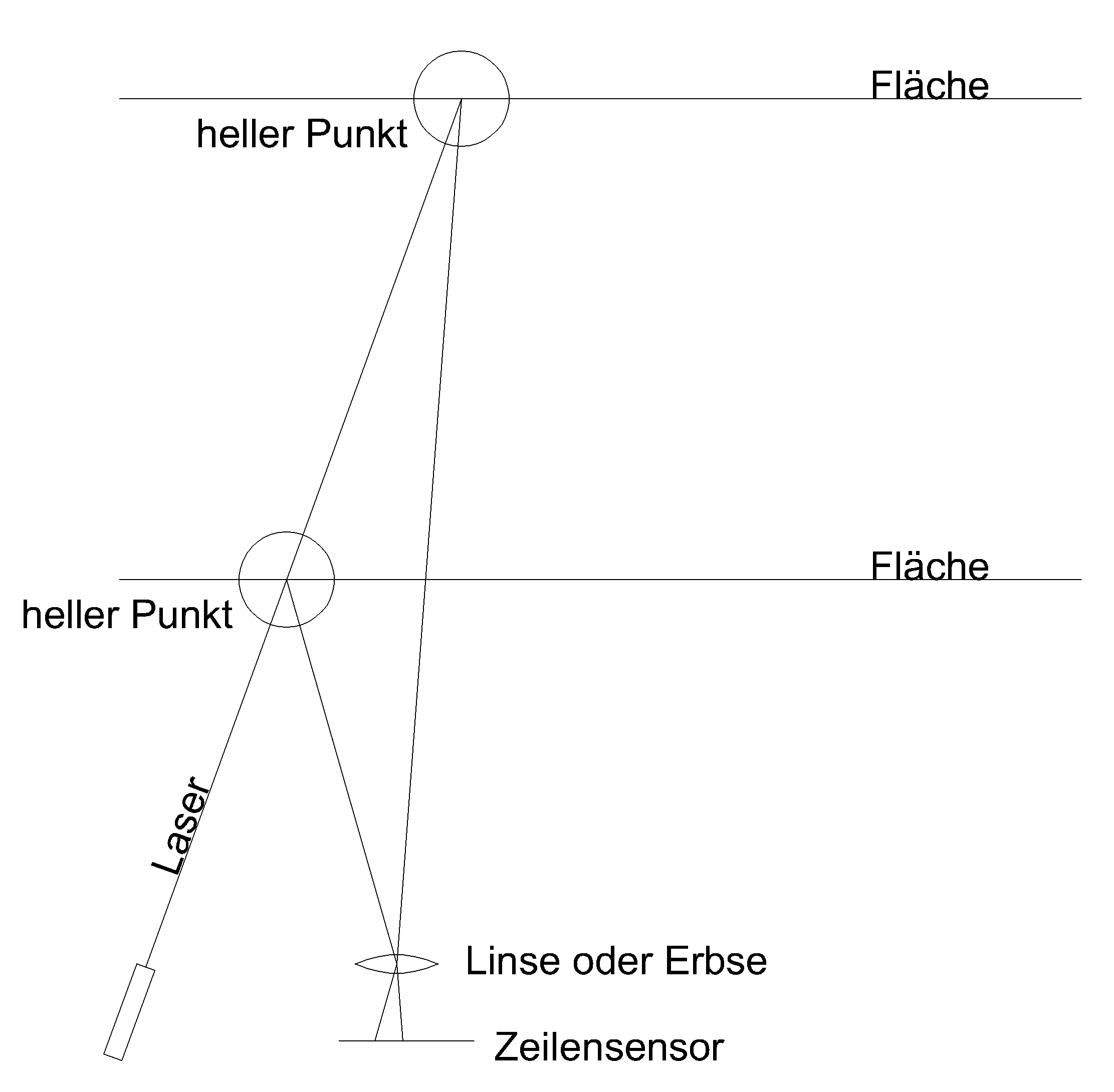
>ist inzwischen auch mei Favourit, wobei man neben dem Schrägstrahler >noch einen waagerecht-Strahler zur referenz benötigt An welcher Stelle?
Rolf M. schrieb: > Es wird quer zur Bewegungsrichtung gemessen. Was aufgrund der geringen Schallgeschwindigkeit relativ zur Objektgeschwindigkeit zu einer Schräg-messung und somit zu einen deutlichen Doppler wird. > Außerdem verändert der > Dopplereffekt nur die Frequenz, aber nicht die Laufzeit des Signals. Ja, aber zur Bestimmung der laufzeit muss das Echo selektiert werden, was üblichwerweise durch einenBandpass auf die US-Mittenfrequenz geschieht. Zur Berücksichtigung des doppler muss dieser Filter jetzt breitbandig ausfallen. Des weiteren bedeudet Frequenzänderung eine Änderung der Anstiegszeit und das verschiebt den Detektionszeitpunkt schon und damit die gemessene Laufzeit.
Rolf M. schrieb: > Aber nicht im Bereich 1 bis 10 cm. Für diesen Bereich nutzt auch Daimler > Ultraschallsensoren. Ja beim Park-assistenten. Bei der geringen Einparkgeschwindigkeit kann man das System als in Ruhe betrachten -> kein Doppler. Das Problem bei der hier beschriebenen Aufgabe ist die Bewegung des Fahrzeuges, nicht der Abstand.
Sensorix schrieb: > Ja, aber zur Bestimmung der laufzeit muss das Echo selektiert werden, > was üblichwerweise durch einenBandpass auf die US-Mittenfrequenz > geschieht. Zur Berücksichtigung des doppler muss dieser Filter jetzt > breitbandig ausfallen. > > Des weiteren bedeudet Frequenzänderung eine Änderung der Anstiegszeit > und das verschiebt den Detektionszeitpunkt schon und damit die > gemessene Laufzeit. Das stimmt zwar, sollte in der Applikation aber einen vernachlässigbaren Fehler erzeugen. Die geforderte Genauigkeit von 1cm entspricht einer Laufzeit von 2 * 0,01m --------- = ca. 60us 330m/s Das entspricht ca. 20 Ultraschallperioden, Phasenverschiebungen können da wohl vernachlässigt werden. Gruß, Stefan
An Stelle des Folienpotis könnte man auch einfach eine dünne Leiste nehmen die mit SMD Tastern oder Knackfröschen besetzt ist. Folie drüber, fertig. Ist auf jeden Fall sehr Kostengünstig.
Sensorix, hast du die Anforderungen überhaupt gelesen? 1-10cm Abstand und 1cm Genauigkeit - da spielen die von dir beschriebenen Effekte keine Rolle. US ist hier die erste Wahl. Die ganz billigen Module könnten allerdings Probleme mit diesen geringen Distanzen haben.
Aus dem MAnual des HC-SR04: >Das Auslösen eines Messzyklus geschieht durch eine fallende Flanke am >Triggereingang (Pin 2) für mindestens >10μs. Das Modul sendet darauf nach ca. 250μs ein 40 kHz Burst-Signal für >die Dauer von 200μs. Danach geht der >Ausgang (Echo, Pin 3) sofort auf H-Pegel und das Modul wartet auf den >Empfang des Echos. Wird dieses >detektiert fällt der Ausgang auf L-Pegel. 20ms nach Triggerung kann eine >weitere Messung stattfinden. Wird kein >Echo detektiert verweilt der Ausgang für insgesamt 200ms auf H-Pegel und >zeigt so die erfolglose Messung an. >Danach wartet das Modul auf die nächste fallende Flanke am Triggereingang >und die Messung beginnt neu. D.h. Du kannst alle 20ms eine Messung machen. Das ist ev. zu wenig, je nachdem, wie schnell Deine AUtos fahren und wie groß sie sind. Welche Geschwindigkeit ist angedacht und wie groß sind die Autos? Ausserdem benötigt der HC-SR04 anscheinend zwingend ein Echo, um die 20ms zu erreichen. Ohne Echo wartet er (laut dieser Beschreibung) 200ms. Du kannst ausprobieren, ob er auch ohne Echo nach 20ms eine neue Messung startet oder Du sorgst dafür, daß immer ein Echo zurückkommt, z.B. durch eine Bande/Wand auf der anderen Fahrbahnseite. Gruß, Stefan
Guck mal ob dieser ein option ist : SHARP GP2Y0A41SK0F SENSOR, DISTANCE, ANALOGUE OUTPUT
Stefan K. schrieb: > Das entspricht ca. 20 Ultraschallperioden, Phasenverschiebungen können > da wohl vernachlässigt werden. Ich muß mich korrigieren: Bei og. Rechnung bin ich von mir selbst bzw. von meinem US-Wandler ausgegangen, der 300khz hat. Der HC-SR04 macht 40khz, da warens nur noch 1.5 Perioden. Gruß, Stefan
Hallo! Erstmal danek für die vielen Antworten und rege Teilnahme Verusche jetzt auf alle einzugehen: Patrick C. schrieb: > Guck mal ob dieser ein option ist : > SHARP GP2Y0A41SK0F SENSOR, DISTANCE, ANALOGUE OUTPUT Also wenn ich das Datenblatt richtig gelesen habe dann braucht der Sensor um die 50ms pro Messung, das wäre leider für mich dann zu langsam. Stefan K. schrieb: > D.h. Du kannst alle 20ms eine Messung machen. Das ist ev. zu wenig, je > nachdem, wie schnell Deine AUtos fahren und wie groß sie sind. Welche > Geschwindigkeit ist angedacht und wie groß sind die Autos? Das sind 1:10 autos, die Länge wäre ca 190-200mm, theoretsich bei den angenommenen 30 Km/h bzw. 8m/s müsste ich nach spätestens 160mm eine neue Distanz gemssen haben...oder irre ich mich da? Draco schrieb: > Ich denke es geht darum...: RC Driftstrecke... Auswertung vom > Wandabstand zur Punkteberechnung. > > Warum nehmt ihr nicht solche Schwingstäbe und wertet diese bei Bewegung > aus? Da läßt sich dann nämlich auch die Geschwindgkeit anhand der > Pendelstärke berechnen. So habe ich das immer auf den einschlägigen > Strecken gesehen. Ja genau um sowas gehts.... ne mechanische Lösung hatte ich noch ganricht aufm Schirm...hast du da evtl. Links/bilder etc parat? hp-freund schrieb: > All zu schwer werden die Autos ja nicht sein. > > Wie wäre es einfach eins davon: > http://de.rs-online.com/web/p/potenziometer/7081523/ > auf die Strasse zu kleben? > > Dann kannst Du recht genau messen wo das Rad ist und die Auswertung ist > mehr als simpel. Ein Veränderung der Fahrbahn fällt leider weg
M. H. schrieb: > Stefan K. schrieb: >> D.h. Du kannst alle 20ms eine Messung machen. Das ist ev. zu wenig, je >> nachdem, wie schnell Deine AUtos fahren und wie groß sie sind. Welche >> Geschwindigkeit ist angedacht und wie groß sind die Autos? > > Das sind 1:10 autos, die Länge wäre ca 190-200mm, theoretsich bei den > angenommenen 30 Km/h bzw. 8m/s müsste ich nach spätestens 160mm eine > neue Distanz gemssen haben...oder irre ich mich da? Das sollte gerade so gehen. Du hast die Sensoren ja schon da, probier es einfach mal aus. Vor allem das Verhalten ohne Echo ist interessant. Gruß, Stefan
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.