
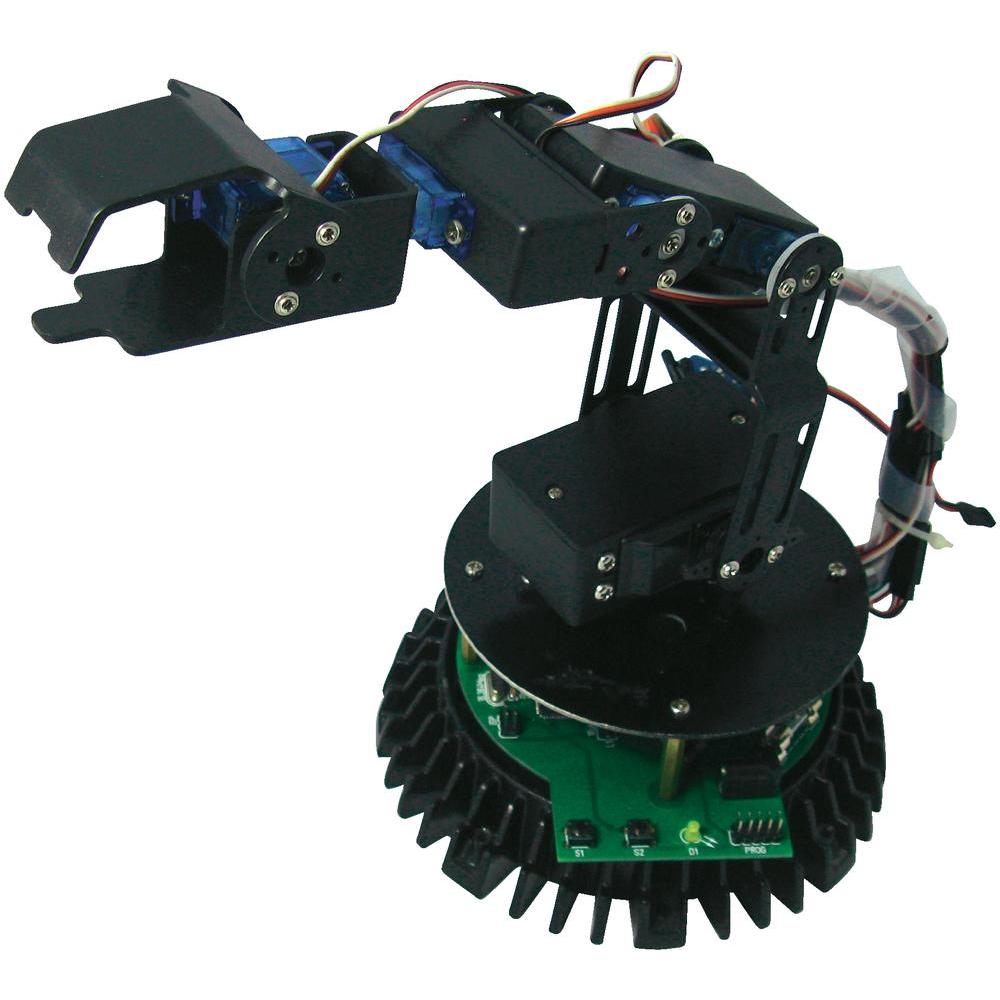

Hallo, ich bin gerade eben angemeldet und ich brauche eure Hilfe! es geht um eine Kleine Produktionsanlage zu errichten! irgend ein paar Werkstücke, die farblich unterschiedlich auf einem Förderband transportiert werden. Ein Farbsensor wird in X-Position auf dem Förderband Platziert, damit man die Farben der Werkstücken unterscheiden kann! nach dem Sensor wird ein Kleiner Roboterarm Platzieren, der die diverse Werkstücke vom Förderband abnimmt und in kleinen Kästchen nach Farben ordnen. Der Roboterarm besteht aus ATMEGA64 Prozessor, EIN/Ausgänge, 6 mini-Servos und verwendet der I²C Bus. Die SPS ist halt eine Siemens S7 CPU 315_2 DP. ich füge dich noch paar Foto dazu, damit ihr noch einen überblick konntet. der Ablauf wird so vorgestellt; der Sensor erkennt der Farbe dann ermittelt das der SPS --> die SPS weist dem Roboter an, an welchem Kasten soll das aufgehobene Werkstück Ordnen --> nachdem der Roboter das getan hat, informiert der Roboter die SPS, dass er die Aufgabe getan hat und bleibt auf der Warteposition...etc ich füge dich noch paar Foto dazu, damit ihr noch einen überblick konntet. Problem: wie kann ich den Roboter über die SPS steuern!!!? gibt es überhaupt Module, die sie mir empfehlen würden !? Danke für euere Hilfe
Angehängte Dateien:
-

SPS_1.jpg
63 KB -

Roboterarm.jpg
69 KB -

SPS_2.jpg
77 KB
Für solche Anwendungen fallen mir drei Wege ein. 1. Ein Roboter(arm) der fertig programmiert ist und auf einfaches Kommando (Start) seine Kunststückchen vorführt. 2. Deine SPS übernimmt die volle Kontrolle über den Roboter. 3. Du nimmst einen Roboter, der noch ein paar "schlaue" Anschlüsse übrig hat, die einen Sensor vertragen. Aber warum so aufwändig? Wir haben so etwas immer pneumatisch gemacht. Ein Greifer (pro Farbe oder einer mit großer Reichweite. Ein Hebezylinder. Ein Zylinder für die horizontale Bewegung. Also greifen, heben, horizontal bewegen, absenken, loslassen und dann: Amy go home. Sind die Teile nicht zu empfindlich, so kann man sie auch mit einem Schieber vom Band schieben und über eine Rutsche in den zugehörigen Kasten befördern. Also Farbe bestimmen. Z.B. index 3. Lichtschranken die die jeweilige Position der Teile überwachen. Ist das Teil dann vor dem passenden Schieber: Ventil auf. Sehr leichte und unempfindliche Teile haben wir auch schon vom Band geblasen.
Die Anwendung muss leider so aufwendig eingebaut werden! weil es handelt sich nicht um eine Produktionsanlage... nachdem ich fertig errichtet habe, muss ich mehre Testszenarien schreiben kann! deswegen... Der erste Punkt ist erfüllt, der Roboterarm ist fertig programmiert. Er bekommt ganz einfach befehle von der SPS, wie er sich genau bewegen muss! die Frage, ob es Module bzw. fertige Schnittstelle gibt, mit den ich den Roboterarm mit der SPS ( DP PORT) verbinden kann! Das Protokoll, da ich verwenden möchte ist Das PROFIBUS! geht das ?
Der Profibus ist fast ein Standard. Eine Schnittstelle sollte für viele SPSe verfügbar sein. Bei der S7 brauchst Du die nur anzupappen.
Das ist fast unmöglich Profibus auf dem Arduino zu realisieren. Du kannst natürlich über Ein- / Ausgänge kommunizieren.
Also z.B. 5 Ausgänge von der SPS für Kasten 1 - 5 und ein Eingang an der SPS Für "habe fertig" vielleicht noch einen für "bin am fahren dran"
Angehängte Dateien:
-

ASIC.PNG
84 KB
@Düsendieb ich dachte auch so dass es fast unmöglich Profibus auf dem Arduino zu realisieren! ist aber nicht so. man kan aber ASIC mit Profisbus Support benutzen oder ? schau mal bitte aufs Foto Danke
>Also z.B. 5 Ausgänge von der SPS für Kasten 1 - 5 und ein Eingang an der >SPS Für "habe fertig" vielleicht noch einen für "bin am fahren dran" Es geht auch etwas sparsamer: 2 Pin (A) für 4 Farben (3 für 8 Farben). Da hier zwei Digitalisten werkeln geht's auch binär. 1 Pin (A) für Farbe jetzt gültig (Latch). 1 Pin (E) für Bitte nicht stören (Ready). Hast Du es etwas eiliger, so könntest Du "Teil abgelegt" und "bin in der Ausgangsposition" trennen, um die Zeit, die der Rückweg braucht, auf der Transport und Erkennungsseite zu nutzen. Bei sehr langem Transport kann auch ein Signal: "Habe das Teil vom Band genommen" ausgegeben werden. Dann bleibt bis: "Bin in Ausgangsposition" Zeit.
Amateur schrieb: > Ich vergaß: Sowohl die SPS als auch Dein ATMega sprechen seriell. welches Protokoll passt am besten! RS232, RS485...!?
Carlo B. schrieb: > RS232, RS485...!? Das sind jetzt nicht unbedingt Protokolle sondern Hardwarebeschreibungen der Schnittstellen. Auf beiden können die gleichen Protokolle laufen. Wobei 232 eher eine Punkt zu Punkt Verbindung ist und 485 ein Busssystem mit mehreren Teilnehmern, wenn das verwendete Protokoll das unterstützt.
RS232, RS485...!? Das sind keine Protokolle, sondern elektrische Schnittstellen. Protokoll muss du am besten selbst schreiben, wenn es sowieso eine Übungsaufgabe ist. Profibus, Modbus oder was auch immer von Standartprotokollen da ist, wäre was für einen industriealen Einsatz. Damit die anderen das problemlos erweitern und ändern können. Kostet aber was an der Zeit sowas fertig zumachen, wird aber entsprechend bezahlt.
ge-nka schrieb: > Protokoll muss du am besten selbst schreiben, wenn es sowieso eine > Übungsaufgabe ist. es ist sowieso keine Übungsaufgabe! das Probleme, dass ich bisl eile habe, deswegen habe ich nach den Hardwarekomponenten gefragt; welche passt zur Verbindung zwischen der SPS und dem Roboter am besten! oder kann ich einfach von EIN/AUSgänge SPS zu EIN/AUSgaänge µc anpappen!
Mit einem Pegelwandler kannste auch die Sps-ausgäge (24 V) an die Eingänge des Controllers(max 5V) legen.
Düsendieb schrieb: > Das ist fast unmöglich Profibus auf dem Arduino zu realisieren. Warum? Wenn er es hobbymäßig macht (Zeit kein Geld kostet) und ein halbes Jahr Freizeit in intensivstes Studium der Profibus-Spezifikationen investiert und alle Tische und Stühle und sonstige bewegliche Teile am Boden festschraubt so daß er sie nicht versehentlich durchs geschlossene Fenster werfen kann sollte es doch problemlos möglich sein das zu implementieren.
Da Du ja nur eine Peer-To-Peer Verbindung aufbaust, sollte es nicht nötig sein ein Protokoll zu verwenden. In der Industrie geht es aber oft sehr schmutzig zu (elektrisch gesehen). Deshalb ist bei längeren Entfernungen RS485 zu Empfehlen.
Ein paar Fragen : 1. Wie findet der Roboter-Arm den Farbklotz ? Der müsste ja immer auf der gleichen Stelle liegen oder ? Was wenn er verrutscht ? 2. Nichts gegen dich, aber welche Sprache sprichst du eigentlich ? Englisch ? Ist vllt einfacher auf der zu kommunizieren. 3. Worin hast du Erfahrung ? Beherrscht du eine SPS ? Arduino ? C ? Carlo B. schrieb: > muss leider so aufwendig eingebaut werden! Carlo B. schrieb: > weil es handelt > sich nicht um eine Produktionsanlage... Carlo B. schrieb: > es geht um eine Kleine Produktionsanlage zu errichten! Ganz ehrlich, da geht mir der rote Faden verloren... Für WAS baust du das ? Für deinen Chef ? für dich ? Für einen Kunden zum vorführen ?
Bevor mich jemand verbessert: Ion schrieb: > Für WAS* baust du das ? Für deinen Chef ? für dich ? Für einen Kunden zum > vorführen ? *Für WEN Ion schrieb: > Ist vllt einfacher auf* der zu kommunizieren. *in
Ion schrieb: > Ein paar Fragen : > > 1. Wie findet der Roboter-Arm den Farbklotz ? Der müsste ja immer auf > der gleichen Stelle liegen oder ? Was wenn er verrutscht ? da sieht man ganz deutlich, dass du die Problemdarstellung nicht gelesen hat! der Stand des Roboterarm habe ich es vom Beginn erwähnt! Der Roboter-Arm ist fertig Programmiert, der sollte gar keinen Farbklotz erkennen! das macht er aber der Sensor KLAR !? ich habe auch schon erwähnt, dass der Roboter-Arm auf der gleichen Stelle liegt !!! also nach Rutschen..etc habe ich gar keine Frage gestellt KLAR !? > > 2. Nichts gegen dich, aber welche Sprache sprichst du eigentlich ? > Englisch ? Ist vllt einfacher auf der zu kommunizieren. mir 100 % sicher, dass du außer Deutsch und Englisch gar keine Sprache kannst! was du aber wissen sollst, dass ich 5 Sprache Kann : Persisch, Englisch, Arabisch, Spanisch und Französisch! und DEUTSCH OK! noch ne Info ich habe angefangen Deutsch zu lernen im Jahr 2013 ! der Rest kannst selbst verstehen! ich bin jetzt in Deutschland, d.h. muss nur in Deutsch kommunizieren sonst kann ich mich nie verbessern ! also es muss einfacher sein in der deutschen Sprache zu kommunizieren ! > > 3. Worin hast du Erfahrung ? Beherrscht du eine SPS ? Arduino ? C ? ich habe Erfahrung sowhol mit SPS als auch mit µc-CHIP, ich kenne mich aber nicht gut aus mit Arduino! des wegen mir paar Sachen noch unklar! > > Carlo B. schrieb: >> muss leider so aufwendig eingebaut werden! wenn jemad sich vertippt d.h. nicht , dass er die Sprache nicht kennt OK! aufendig --> aufwändig hättest ganz einfach ä gegen e ausgetauscht dann bist in Ruhe ;-) > Carlo B. schrieb: >> weil es handelt >> sich nicht um eine Produktionsanlage... das habe nicht ganz verstanden! woran liegt das Problem hier !!? erkäre es mir mal bitte ! Danke vorab > Carlo B. schrieb: >> es geht um eine Kleine Produktionsanlage zu errichten! Das gleiche in diesem Satz > Ganz ehrlich, da geht mir der rote Faden verloren... ne bitte nicht lass dich nicht veloren gehen ! das lohnt sich nicht! keiner hat die Sprache diskutiert außer du ! und wer was nicht verstanden hat!, hat er ganz locker ne Frage gestellt! also entwder du bist der Johann Wolfgang von Göthe oder die andere können kein Deutsch!!! hättest du einfach deine Frage gestellt, hätte ich versucht dir zu erkären. PUNKT > Für WAS baust du das ? Für deinen Chef ? für dich ? Für einen Kunden zum > vorführen ? 1-ichts gegen dich aber so Fragen stellt man nicht, weil das ist Privat ! das geht dich nicht an, ob es privat oder x oder y ist OK! das musst du lernen. 2-siehst du !!! du hast auch Schreibfehler gemacht!!! Das musst du verstehen, beim Schreiben entstehender, unterlaufender Fehler unterlaufender Fehler, obwhol man die Muttersprache Schreibt KLARO !!!
hi Carlo, Ich glaube du hast Ion etwas falsch verstanden. Er wollte da wohl eher etwas behilflich sein und mit dir in deiner Muttersprache kommunizieren. Er, und wir alle können ja nicht wissen das dein sprachliches Problem da entsteht: >ich bin jetzt in Deutschland, d.h. muss nur in Deutsch kommunizieren >sonst kann ich mich nie verbessern ! also es muss einfacher sein in der >deutschen Sprache zu kommunizieren ! Es ist nun mal verwirrend wenn dein Projekt mal: >es geht um eine Kleine Produktionsanlage zu errichten und etwas später: > weil es handelt sich nicht um eine Produktionsanlage... ist. Aber egal dein Problem ist ja die Verbindung S7 / µC. Wobei du hast noch nicht mal gesagt wie denn dein µC den Auftrag gern bekommen würde. Wie ist er denn getestet worden? Das Einfachste wäre die Kommunikation über E/A's der S7 und Pegelwandler laufen zu lassen. S7->µC über Spannungsteiler 24->5V und µC->S7 über zb.UDN 2981 in der Art wie es " Amateur " schon schrieb. Die direkte Profibusanbindung ist schon recht heftig weil das dein µC vermutlich nicht auch noch auf die Reihe bekommt. Also wäre ein 2.µC notwendig der sich dann über E/A's oder eben I2C mit dem Roboter unterhält. Eine weitere indirekte DP Anbindung ginge eventuell über DP/RS232_485 Wandler, aber nur wenn UART an deinem µC noch möglich ist. Viel Erfolg und bitte nicht so aufbrausend, Uwe
Uwe schrieb: Hi Uwe, Danke für die für deine Antwort. > Es ist nun mal verwirrend wenn dein Projekt mal: >>es geht um eine Kleine Produktionsanlage zu errichten > und etwas später: >> weil es handelt sich nicht um eine Produktionsanlage... hier meinte ich ...nicht nur um eine PA... d.h. es geht nicht darum, dass ich nur eine kleine Fertigungsstraße errichte, das ist nur ein Teil des Projektes :-) > Wobei du hast noch nicht mal gesagt wie denn dein µC den Auftrag gern > bekommen würde. Wie ist er denn getestet worden? ich habe einfach das Problem gestellt, damit die Experten, die davon ne Ahnung haben mir was am besten empfehlen. Deswegen habe ich nach Schnittstellen Zwischen SPS und dem Roboter-Arm gefragt. > Viel Erfolg und bitte nicht so aufbrausend, Uwe mache ich^^ ich bedanke mich noch einmal.
Carlo B. schrieb: > Der Roboterarm besteht aus ATMEGA64 Prozessor, EIN/Ausgänge, 6 > mini-Servos und verwendet der I²C Bus. Wenn es über den I2C Bus laufen sollte wäre z.B. sowas als Schnittstelle denkbar. http://www.horter.de/i2c/i2c-RS232-Modem-2/i2c-RS232-Modem2-Beschreibung.html Eigenes Protokoll auf der Simatic Seite(oder Mapping der Befehle, Signale zu den Variablen in SPS,falls Protokoll schon im Roboter vorhanden ist) muss du dann trotzdem machen.
hi ge-nka, > Wenn es über den I2C Bus laufen sollte wäre z.B. sowas als > Schnittstelle denkbar. > http://www.horter.de/i2c/i2c-RS232-Modem-2/i2c-RS232-Modem2-Beschreibung.html ich habe es mir gerade geschaut, das passt 100% thnx ;)
Carlo B. schrieb: > ich habe es mir gerade geschaut, das passt 100% thnx ;) Häh. Der I2C wird doch für die Peripherie für den ATmega verwendet. Ich würde es so machen, wie es Epson mit der RC auch macht. Z.B. hiermit: http://www.anybus.com/products/products.asp?PID=70&ProductType=Anybus-S Das ganze geht dann über eine parallele Kommunikation. Pins hast du ja anscheinend noch genug frei, wenn du schon I2C für die Peripherie nutzt.
Also ich weiss ja nicht. Ich würde halt einfach den Anschluss nehmen, der vom Hersteller dafür vorgesehen ist, dass man von extern mit dem Programm im Robot kommuniziert: eine stink normale UART Im PC-Programm "Robot-Loader", das den Bootloader anspricht, ist sogar ein entsprechendes Terminalprogramm mit eingebaut. D.h. das erste was ich testen würde ist, wie sich der Bootloader verhält - ob ich da mit einem anderen Terminalprogramm am Bootloader vobeikomme, was wohl sehr wahrscheinlich sein wird. Kann diese Frage mit 'Ja' beantwortet werden (was wie gesagt sehr wahrscheinlich der Fall sein wird), dann ist der Rest: UART Verbindung zur SPS herstellen, eventuell mit einem entsprechenden MAX232 als Pegelwandler und gut ists. Natürlich wird man sich für den Mega ein entsprechendes Programm schreiben müssen. Aber dazu liefert der Hersteller ja auch entsprechende Demos mit.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.