





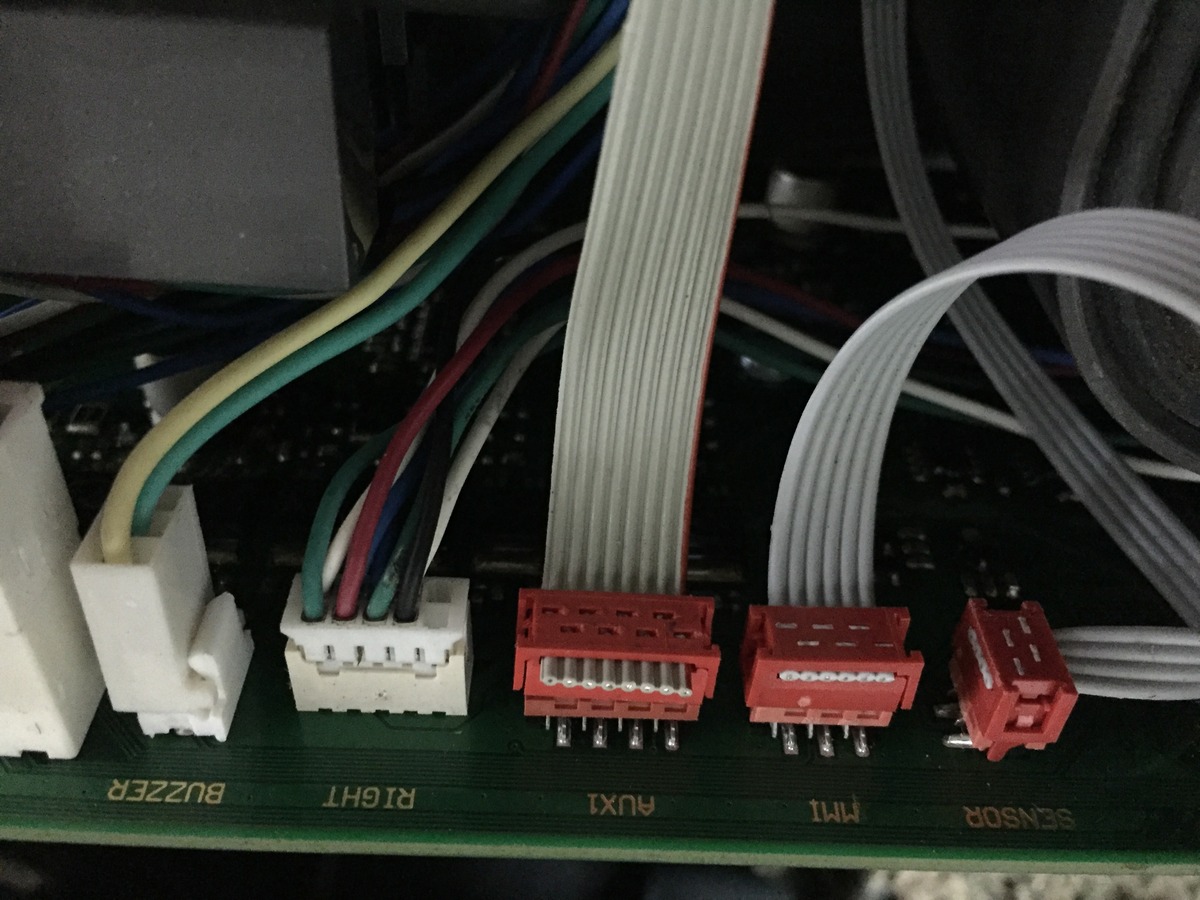
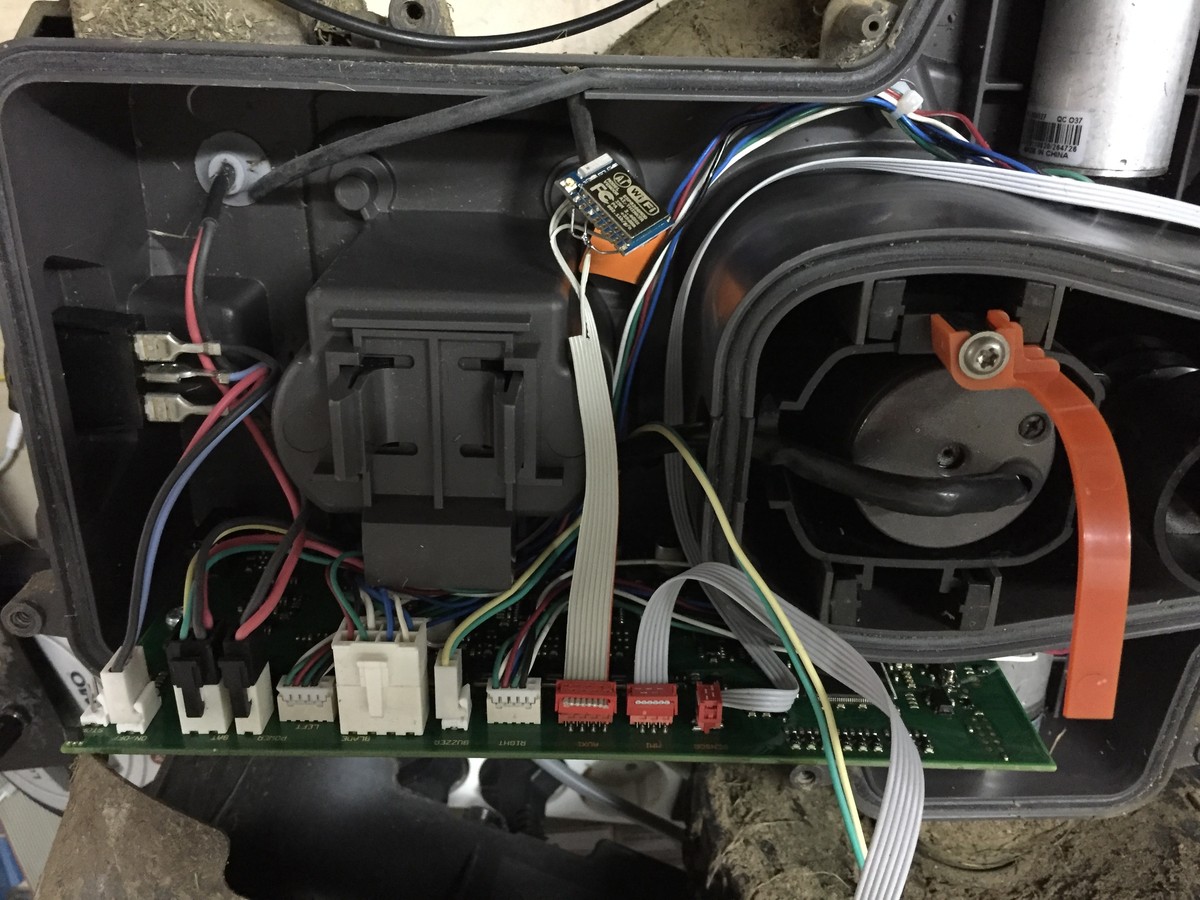



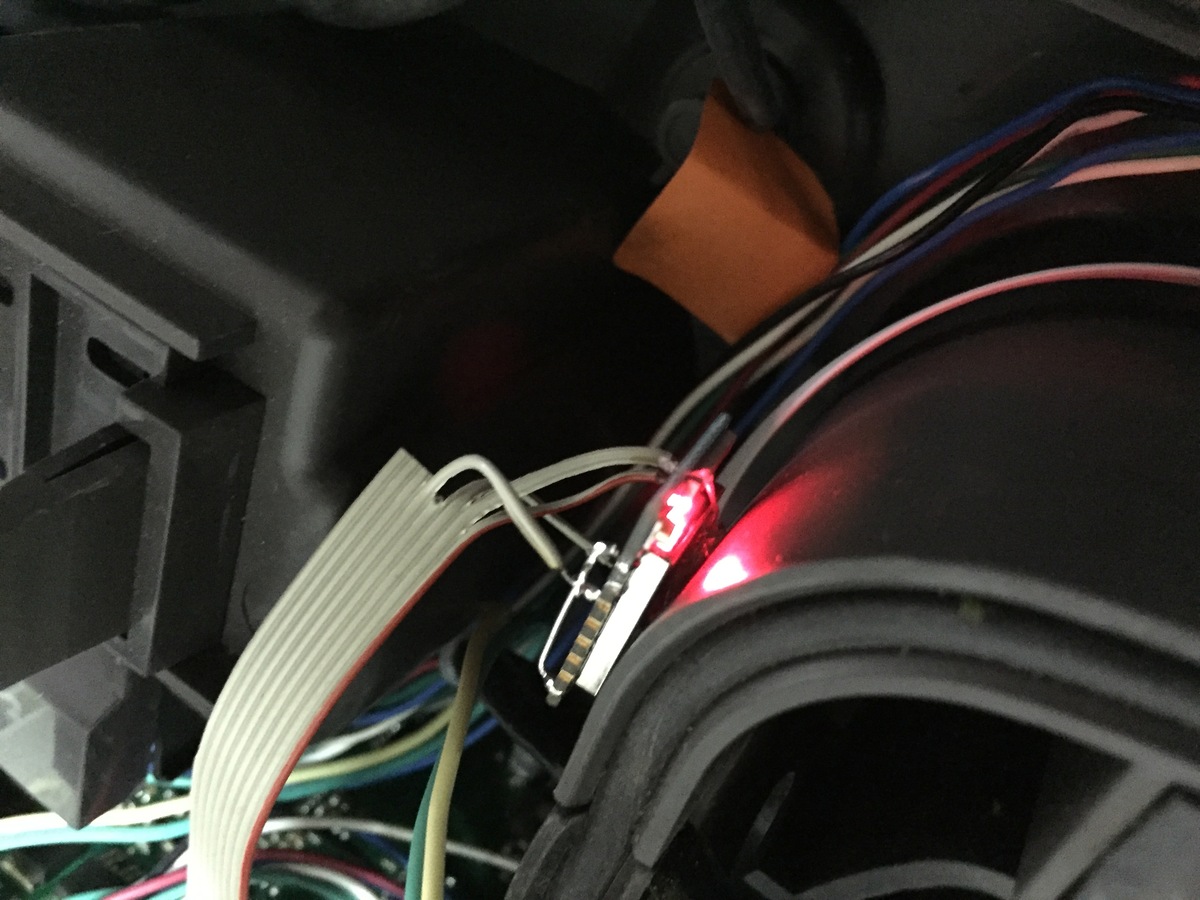
Hallo Zusammen, ich habe schon lange nach einer Möglichkeit gesucht meinen Robomäher fernzusteuern. Ich bin auf diesen Forum Beitrag gestoßen: Beitrag "Automower G3 mit USB Diagnoseport fernsteuern?" Und habe daraufhin meinen Gardena R40li mit einer WIFI zu UART Schnittstelle bestückt. Ich habe dafür einen ESP2866 esp07 benutzt. Der hat ganze 5 Euro gekostet :-) Zuerst musste ich den ESP2866 mit Hilfe eines FTDI USB Kabel einstellen so das er sich mit meinem WLAN Netz verbindet und er sich in den Wifi Passthrough Modus versetzt. Dann ist es möglich über z.b. das Programm Packet Sender UDP Pakete zu senden und zu empfangen die auf serielle Kommandos umgesetzt werden. Dafür schreibe ich noch eine kleine Anweisung als PDF. Ich habe bis jetzt schon mal dokumentiert welche Schrauben man am Gardena lösen muss und wie der AUX Anschluss des Gardena´s angeschlossen werden muss. Ich gehe davon aus, weil der Husqvarna G3 baugleich ist das, dass auch für diesen Gilt. Die Schrauben die gelöst werden müssen habe ich markiert. Bei dem Roten Stecker auf dem AUX Port ist die 1 die rote Seite am Flachkabel. Darauf beziehe ich mich. Die Verbindungen sind: ESP2866 esp07 ; AUX Port Rxd -> 1 TxD -> 2 GPIO15,GND -> 3 RST,EN,VCC -> 5 Ich habe Chris P. (ein-stein) geschrieben weil ich mit der Anweisung nicht herausbekommen wie ich z.b. die Uhr neu stellen kann. Ich möchte wenn ich die nötigen Info´s bekomme eine Doku dazu schreiben. Wenn das soweit alles klar ist kann man über den GIRA Homeserver den Roboter fernsteuern. Ich würde auch anbieten für einen Unkostenbeitrag fertige Module zur Verfügung zu stellen. Vielleicht würde jemand der das Projekt interessant findet seine Wertvolle Zeit dafür nutzen und einen kleines Programm schreiben wo man die IP-Adresse und den Port für die UDP Pakete für eingehend und ausgehend angeben kann und die Antwort richtig interpretiert wird. So ein kleines Debug Tool als KonsolenAnwendung ich bin da nicht so bewandert. Falls Fragen sind einfach schreiben. Gruß Follow2000
Angehängte Dateien:
-

Unterboden_Loesen1.JPG
240 KB -

Unterboden_Loesen2.JPG
250 KB -

Unterboden_Loesen3.JPG
240 KB -

Deckel_loesen1.JPG
230 KB -

Deckel_loesen2.JPG
240 KB -

Deckel_loesen3.JPG
230 KB -

Stecker_AUX.JPG
230 KB -

ESP_eingebaut.JPG
240 KB -

Zusammengeloetet1.JPG
240 KB -

WLAN_UART.JPG
230 KB -

Sensor_eingebaut1.JPG
230 KB -

Sensor_eingebaut2.JPG
230 KB
Der Nachteil der Stromversorgung des Moduls von der 3,3V Schiene ist, dass der Empfänger nur während des Ladens und ca. eine Minute vor Start aktiv ist. Dadurch lässt sich der Mäher z.B. nicht starten, wenn er aus ist. Man könnte da z.B. die Akkuspannung am Pin 7 runterregeln. Dann verbraucht der zwar auch beim rumstehen Strom, kann aber durch H-Pegel an TX dem Mäher aktivieren. Gruß Christian
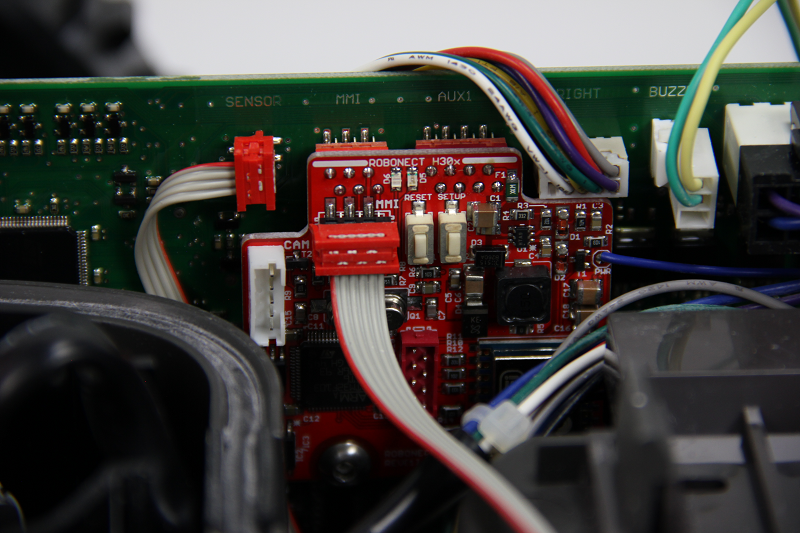
Moin zusammen, ich wäre auch sehr daran interessiert neben r40 in meine Hausautomation zu integrieren. Gerne auch mit einem fertigen Modul zum Unkostenbeitrag ;-) Wie weit ist das Ganze denn jetzt schon gediehen? Welche Steuerbefehle bzw. welche Statuswerte sind schon verfügbar? Ggf. könnte ich bei der Umsetzung mit unterstützen, Programmierkenntnisse sind vorhanden.
Angehängte Dateien:
-

Robonect_H30x_top.jpg
230 KB -

Robonect_H30x_bottom.jpg
460 KB -

Robonect_H30x.png
590 KB -

Screenshot_AP.PNG
57 KB -

Screenshot_FirmwareWirdInstalliert.PNG
28 KB -

Screenshot_Zeiten.PNG
42 KB
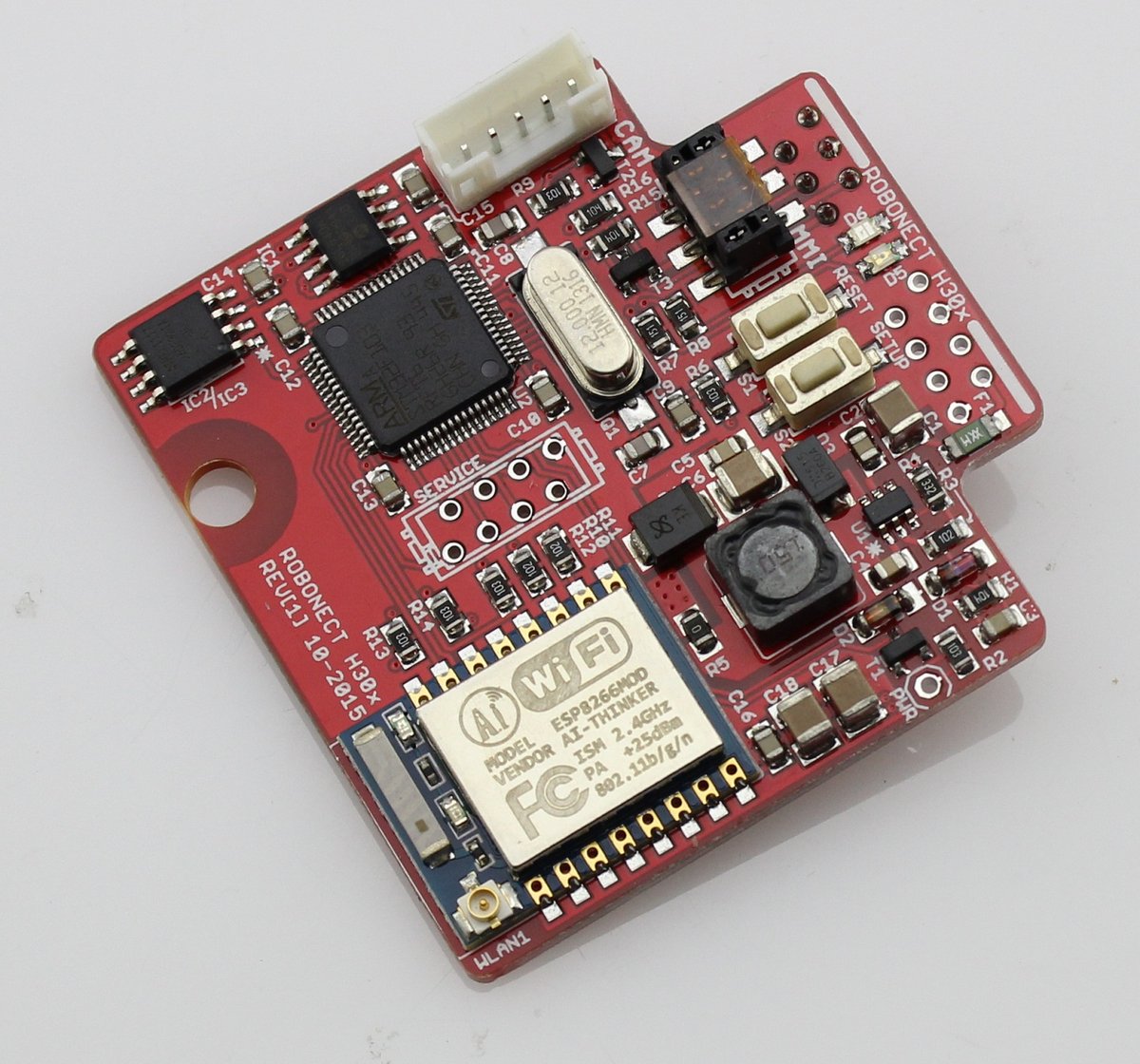

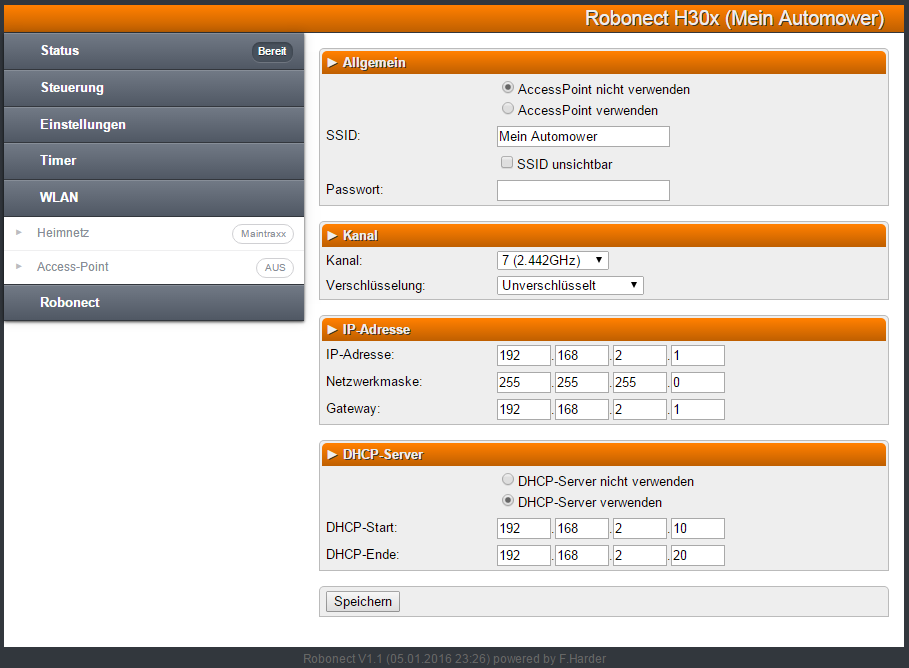
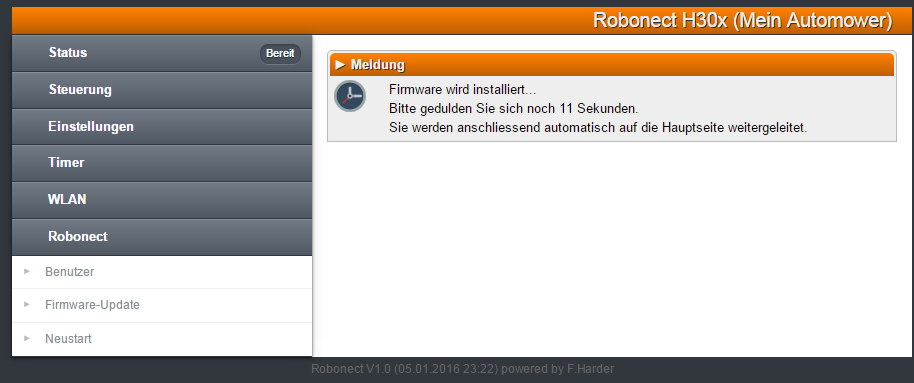
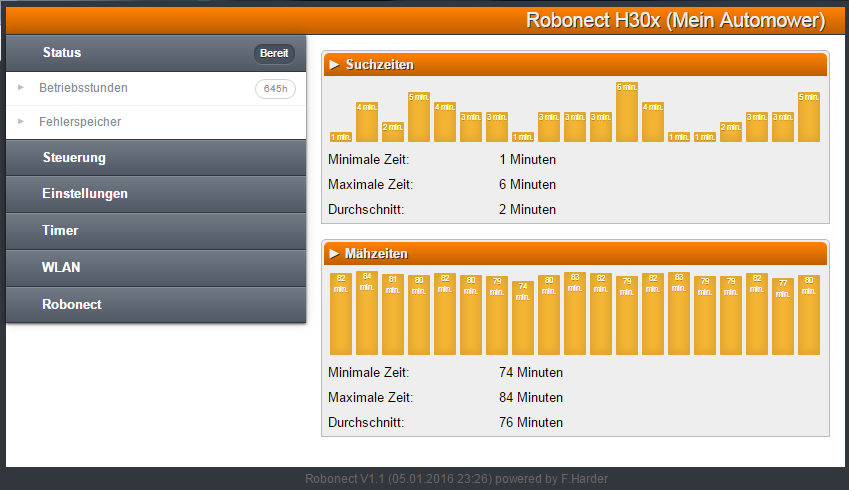
Warum das Rad neu erfinden? Ein WLAN-Modul (Webinterface) gibt es bereits.
Hallo, gibt es das mit dem ESP8266 noch? Wäre sehr interessiert und muss eigentlich nur die Uhrzeit regelmäßig stellen beim vergesslichen R70Li, da wäre eine Robonect der Overkill. Zeitserver anfragen und seriell programmieren wäre auf dem ESP kein Problem. Danke Christoph
Hallo in die Runde, ich habe nun mein Programm auf dem Wemos D1 mini in der Testphase und es scheint die Befehle korrekt anzunehmen. Wie läuft das bei euch so?
Ich habe die Realisierung in meinem Fall abgeschlossen und wollte es hier zur Verfügung stellen. Die Anbindung erfolgt über die Loxone Software: Link: https://www.loxwiki.eu/pages/viewpage.action?pageId=48137811 Have fun....
Ich habe meinen "Projekt-Status" hier beschrieben: Beitrag "Automower G3 mit USB Diagnoseport fernsteuern?"
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.