Hi, hat jemand einen Husqvarna Automower G3 und sich evtl schon mit dem USB Port beschäftigt? Die G2 kann man wohl über den Seriell-Diagnoseport ansteuern: http://homematic-forum.de/forum/viewtopic.php?t=7295 (Nicht selbst versucht, weil habe/hatte keinen) Die G3 (den hab ich gerade gekauft) haben statt der seriellen Schnittstelle einen USB-Port. Ich würde mal vermuten, dass das letztlich auch eine serielle Schnittstelle ist und die Ansteuerung dann womöglich auch genauso funktioniert. Hat das schon jemand probiert oder evtl auch Interesse daran den Automower fernzusteuern? Vg, Conny
Hi, hat jetzt hier keiner einen Automower G3? :-) Ich werde immer mal wieder fragen. Ich habe in zwischen gefunden, dass ein STM32 Prozessor drin ist - wenn man ihn an den Rechner ansteckt per USB dann findet man einen STM32 Virtual Com Port. Aber anscheinend antwortet er auf die Befehle des G2 nicht, habe gelesen, dass das schon jemand versucht hat und auch bei meinen 10min, die ich dem gegeben habe kam noch nichts bei raus. Also braucht das noch etwas mehr Forschung. Idealerweise zusammen mit einem Händler, indem man einen USB Sniffer installiert bevor die Autocheck Experience Diagnosesoftware läuft - die ja leider nicht mehr erhältlich ist und auch ohne Händlerlogin nicht funktioniert. Ohne Sniffer ist es langwierig.
Conny G. schrieb: > Hi, > > hat jetzt hier keiner einen Automower G3? :-) > Ich werde immer mal wieder fragen. Low, willst du mir die letzte sportliche Betätigung rauben?
Hi Conny, hast du schon einen Erfolg gehabt? Ich hab jetzt auch einen 305 und würde mich dafür interessieren. Gruß Chris
Habe übrigens gerade von einer schweitzer Firma, die für den G2 eine Funkschnittstelle herstellt erfahren: - von Husquvarna wird es das SMS-Modul ab Herbst geben - damit auch ein Firmware Update, das eine interne serielle Schnittstelle aktiviert, die dafür benötigt wird - der USB Port sei dafür nicht nutzbar, da dort ständig die Baudrate gewechselt wird D.h. Husquvarna hat sich beim G3 mehr abgesichert, dass der Diagnoseport nicht so einfach gehackt wird: Diagnose-Software nur mit Händler-Login und Online-Lizenz-Check, Baudratenwechsel bei der USB-Seriell-Schnittstelle. Vermute mal der Baudratenwechsel folgt auch einer Regel, aber es braucht mehr Forschung als beim G2.
Hat hier jemand schon mehr Info über Lösungen oder Hacks? Abgesehen davon: http://www.razyboard.com/system/morethread-am305-komplette-funkfernsteuerung-corsatimo-2242778-6276550-0.html Das ist eine Fernsteuerung der Tastatur, aber doch ein ziemlicher Aufwand und Daten lesen kann man auch nicht...
Is zwar Offtopic aber wie mähen die bei Kinderspielzeug und anderen Sachen in der Wiese? Muss man vorher aufräumen oder merkt er sich die stellen wo beim letzten mal was lag? Ich habe nämlich ne Kinderspielwiese und keinen englischen Rasen wie aus der Werbung ;)
Angehängte Dateien:

Jörg Esser schrieb: > Is zwar Offtopic aber wie mähen die bei Kinderspielzeug und anderen > Sachen in der Wiese? Muss man vorher aufräumen oder merkt er sich die > stellen wo beim letzten mal was lag? Anbei ein Foto von einem Rasensprenger den wir auf der Wiese vergessen haben und der in einen Zweikampf mit dem Rasenmäher gehen musste. Die 3 Klingen des Automower waren dann auch alle abgebrochen und mussten getauscht werden. Beim Zweikampf fuhr der Robo auf den Rasensprenger auf und steckte auf ihm fest, durch weitere Versuche anzufahren fräste er bei jedem Rad 3 cm tiefe und 10cm lange Furchen in den Rasen :-) Der Schlauch hatte auch eine Menge kleiner Schnitte und war nicht mehr dicht. Betraf zum Glück nur den letzten Meter, damit reichte abschneiden, Kupplung neu drauf und fertig. Also: Man muss aufräumen. Man kann nur stehen lassen, was einen Stoss mit dem Mäher aushält, also was hoch genug ist (er also nicht darauf fährt), standfest genug ist (nicht umfällt) und nicht wegrutscht. > Ich habe nämlich ne > Kinderspielwiese und keinen englischen Rasen wie aus der Werbung ;) Bei uns spielen die Kinder (dank Rasenmähroboter) auf einem englischen Rasen und danach wird aufgeräumt :-))
Conny G. schrieb: > Jörg Esser schrieb: >> Is zwar Offtopic aber wie mähen die bei Kinderspielzeug und anderen >> Sachen in der Wiese? Muss man vorher aufräumen oder merkt er sich die >> stellen wo beim letzten mal was lag? > > Anbei ein Foto von einem Rasensprenger den wir auf der Wiese vergessen > haben und der in einen Zweikampf mit dem Rasenmäher gehen musste. > Die 3 Klingen des Automower waren dann auch alle abgebrochen und mussten > getauscht werden. > Beim Zweikampf fuhr der Robo auf den Rasensprenger auf und steckte auf > ihm fest, durch weitere Versuche anzufahren fräste er bei jedem Rad 3 cm > tiefe und 10cm lange Furchen in den Rasen :-) > Der Schlauch hatte auch eine Menge kleiner Schnitte und war nicht mehr > dicht. Betraf zum Glück nur den letzten Meter, damit reichte > abschneiden, Kupplung neu drauf und fertig. > > Also: Man muss aufräumen. > > Man kann nur stehen lassen, was einen Stoss mit dem Mäher aushält, also > was hoch genug ist (er also nicht darauf fährt), standfest genug ist > (nicht umfällt) und nicht wegrutscht. > Dann wird er wohl nur meinen kleinsten vernaschen ;) Vielen Dank für deine ehrliche aussage. Gruss, Jörg
Jörg Esser schrieb: > Dann wird er wohl nur meinen kleinsten vernaschen ;) Keine Sorge. Einerseits hat ein guter Rasenmäherrobo diverse Sicherheitsfeatures. Andererseits ist er so leise, dass er auch nachts fahren kann. Bei uns immer 0 Uhr bis 7 Uhr. > Vielen Dank für deine ehrliche aussage. Np. Sehe ich aber nicht als großen Nachteil. Eher noch als Vorteil, dass es einen zwingt aufzuräumen und nicht immer allen möglichen Zeugs auf der Wiese zu lassen. Und den Zustand des Rasens könnte ich mit regulärem Mähen niemals erreichen. Ich müsste (musste) mindestens 1x die Woche mähen, was nicht immer geht wg. Wetter, Lärmzeiten, Arbeitszeiten und wenn es mal länger war ist es ein mords geviecher bis der Rasen wieder kurz ist und sieht dann auch erstmal für ein paar Tage erstmal schrecklich aus. Jetzt ist er jeden Tag schön wie im Teletubby-Land, wie ein Teppich. Und wenn ich morgens aus dem Fenster blinsle ist alles schon erledigt. Dafür kann man das "Investment" von ein bisschen Aufräumen / Mitdenken schon aushalten.
Hallo, Ist es möglich die Fehler vom Automower G2 am Pc auszulesen ohne das Autocheck Programm von Husqvarna? mfG Vries
Vries schrieb: > Hallo, > > Ist es möglich die Fehler vom Automower G2 am Pc auszulesen ohne das > Autocheck Programm von Husqvarna? > > mfG > Vries Beim G2 müsste das gehen. Der hat ja eine simple serielle Schnittstelle, die komplett unverschlüsselt / ungeschützt ist. Und Infos zum Protokoll habe ich schon gefunden in Web. Beim G3 hat sich Husqvarna Mühe gegeben es schwer zu machen. Da ist es eine USB serielle Schnittstelle, wo sie aber wohl ständig die Baudrate wechseln. Das wäre eigentlich nur mit der Händlersoftware und einem USB Sniffer vernünftig analysierbar. Ich habe jetzt übrigens seit 2 Monaten das Connect-Modul im 320 eingebaut und es ist herrlich. Kann den AM jederzeit von überall per App programmieren, starten, stoppen, checken. Und bekomme Popup-Nachricht bei einem Fehler. Vor ein paar Wochen fuhr er sich an einer Beetbegrenzung fest und ich wusste sofort Bescheid, im Ausland, und konnte ihn retten lassen. Genau so hatte ich mir das vorgestellt. Husqvarna hat lange gebraucht, aber die Lösung ist perfekt.
Hi, der G3 hat auch eine simple RS232 Schnittstelle. Ich hab in schon den ganzen Sommer mit einer WLAN Schnittstelle betrieben und das Protokoll ein wenig analysiert. Ich werde das Ganze bei Gelegenheit mal online stellen. Gruß Christian
Chris P. schrieb: > Hi, > > der G3 hat auch eine simple RS232 Schnittstelle. Ich hab in schon den > ganzen Sommer mit einer WLAN Schnittstelle betrieben und das Protokoll > ein wenig analysiert. Ich werde das Ganze bei Gelegenheit mal online > stellen. > > Gruß > Christian Genial! Bin superneugierig!
Hallo Christian, ich besitze seit dem Frühjahr einen 310 / P15. Der dürfte dem G3 ja ähnlich sein?! Hast Du mehr Informationen über die Nutzung der seriellen Schnittstell`? Wo hast Du diese abgegriffen? Danke Dir!
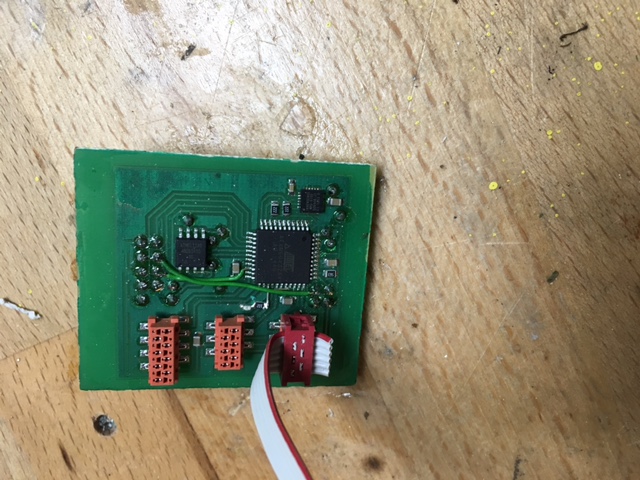
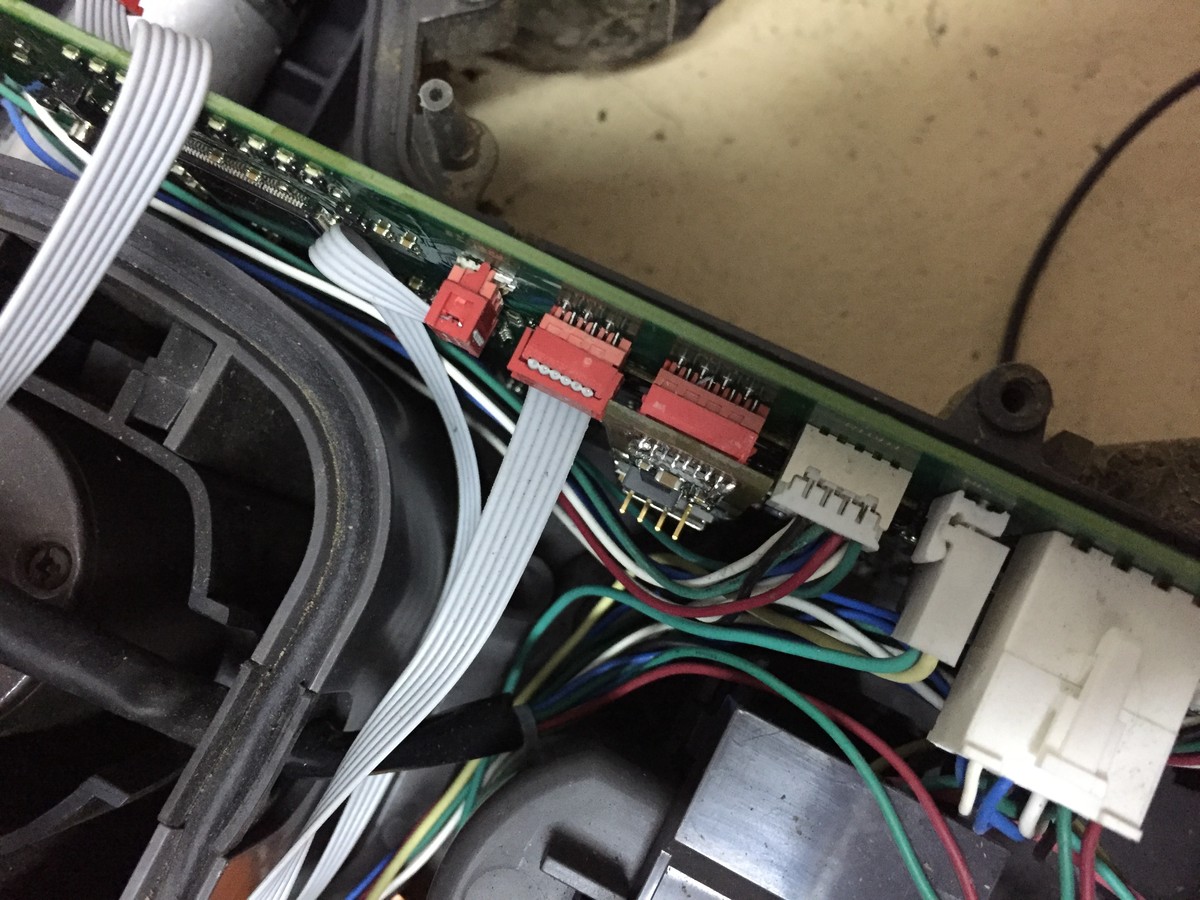
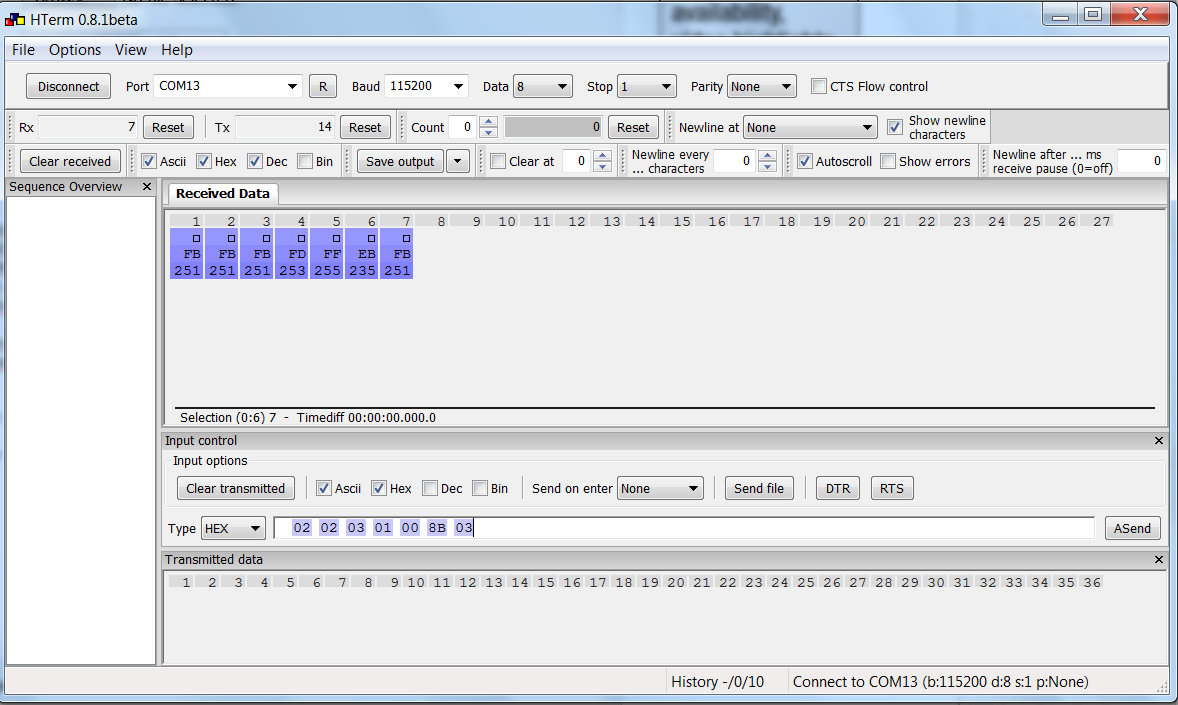
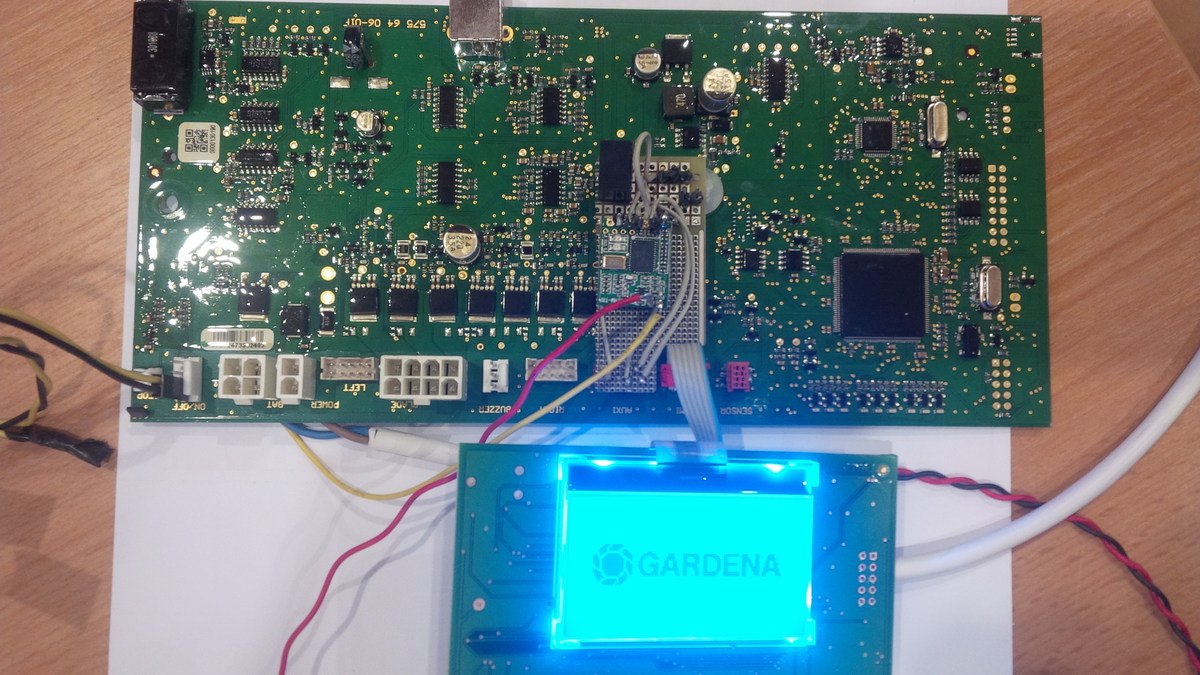
Auf dem MCB gibt es einen 8 poligen AUX Port. Da liegen RX, TX, GND, 3.3V, 5V, 18V und ein unbekanntes Signal. Die Datenrate ist 115200, 8N1. Kommandos bestehen immer aus 0x02, Kommandobyte, Längenbyte, Daten, Checksumme nach dallas-1-wire Standard, 0x03 Bit 0 im Kommandobyte ist Frage/Antwort. Die Antwort hat als 1. Datenbyte einen Statuscode: 00 -> ok 03 -> no such variable? 04 -> ? 05 -> unauthorized (erst pin senden) z.B. abfrage der Zeit: Kommando:02 02 01 00 8b 03 Antwort: 02 03 04 00 15 0c 2a 29 03 ok, zeit: 21:12:42 Die Kommandos scheinen so ähnlich wie die Menüs gruppiert zu sein. 02 - Zeit, Datum, security level, ländereinstellung, eco 04 - Garten: Korridorbreite, Fernstart, Schleife überfahren 06 - Timer 08 - ? 0a - ? 0c - PIN senden 0e - HOME/MAN/AUTO, Test in/out, Kippsensor kalibrieren 10 - Motorentests 12 - nächste start Zeit 14 - sensoren: bat, radmot., messerm., kipp/stoss 16 - irgendwas mir versionsständen 18 - statistic bat, suchzeiten, mähzeiten, bat. cap., mitteilungen)
Hallo Zusammen, ich habe jetzt meinen Mäher auch soweit und ihn mit einem WLAN Modul ausgestattet. Das Lesen verschiedener Werte ist mir jetzt klar. Ich habe versucht die Uhrzeit umzustellen mit z.b.: 02 02 03 15 0c 2a 64 03 damit müsste ich die Uhr ,laut Anleitung, auf 21:12:42 stellen. Es klappt aber nicht. Was mache ich falsch ? Das Pin senden habe ich auch ausprobiert. Hier mal ein Beispiel wenn der Code 1234 ist: 02 0c 04 01 02 03 04 96 03 Funktionier auch nicht:-( Also für einen Tip wäre ich sehr dankbar. Gruß Follow2000
Hi! Klappt das nun auch mit dem 305er? Hab irgendwie den Faden verloren ;-) VG Stefan
Servus! Wird ich Dir nach Weihnachten evtl. sagen können :-)
Hallo Andi, Hast du noch ein paar Info's zum Protokoll die du hier zum besten geben kannst :-) ? Gruß David
Hi Follow2000, > Das Pin senden habe ich auch ausprobiert. > Hier mal ein Beispiel wenn der Code 1234 ist: > 02 0c 04 01 02 03 04 96 03 > Funktionier auch nicht:-( > > Also für einen Tip wäre ich sehr dankbar. das mit der Pin war als integer zu senden wobei erst 00 01 und dann die Pin 1234 = 0x04d2: 02 0c 04 00 01 d2 04 CS 03 Gruß Christian
Hallo Christian, Erstmal Vielen Dank für die Info. Bei meinem r40li klappt der befehl mit der Code eingabe. Ich habe versucht in selber Logik die Uhrezeit zu ändern. Ich wollte die uhr auf 04:04:04 stellen 02 02 05 00 01 04 04 04 DA 03 Habe damit leider keinen Erfolg gehabt. Für ein paar weitere Tipps wäre ich sehr dankbar. Ich habe jetzt Weihnachtsferien und wollte, wenn ich die nötigen Info´s habe ,mal ein kleines Demo MS-DOS Terminal Programm schreiben womit man den Roboter die nötigen Kommandos schicken kann. Ich habe auch schon einen neuen Thread aufgemacht auf dem ich beschrieben habe wie man den Gardena R40li mit einem WLAN UART Modul bestückt :-) Sollte sinngemäß auch für den 305 gelten. Beitrag "Gardena r40li oder Husqvarna G3 fernsteuern" Schon mal vorab euch allen Erholsame Weihnachtstage David
Servus! An einem debug-programm bin ich schon dran. Wird noch 1-2 wochen dauern.. Grüße, andi
In diesem alten Thread gibt es Diskussionen zum ACX2xx, der hatte noch einen Diagnoseport auf UART Basis. Ist ein recht umfangreicher Thread, vielleicht gibt es Parallelen zum neuen AM http://www.roboternetz.de/community/threads/1330-AutoMower-von-Elektrolux-und-Husqvarna/page8?highlight=Automower
Hallo Andi, Wenn du eine Debug Anwendung schreibst dann werde ich es lassen mich da einzuarbeiten. Kann ich dich bei diesem Projekt etwas unterstützen ? Ich würde eine Doku des Protokoll verfassen wenn du mir die nötigen info's zukommen lässt, und diese dann als pdf hier hochladen. Ich habe einen gardena r40li mit serieller Anbindung hier. Wenn ich die Logik verstanden habe ergeben sich die meisten Sachen ich hoffe von selbst. Und ich kann es über Terminal zusätzlich testen. Meine endgültige Lösung wäre das ich den r40li über den Gira homeserver steueren kann. Aber mit einer ordentlichen Protokoll Doku kann man das auf jeder Plattform ausarbeiten. Ich freue mich schon von dir zu hören. Gruß David
Abend! ja, sehr gerne. Ich hab schon seit längerem ein Java-Progrämmchen, welches ich für solche Reverse-Engineering Aufgaben hernehme. Muss ich nur noch anpassen. Ich persönlich werden den Mower entweder in KNX oder aber in FHEM einbinden. Bin mir noch unschlüssig, wie ich die Funkstrecke gestalte. "Normales" WLAN möchte ich nicht im Garten, da ich über eine umfangreiche Automatisierung verfüge, und nicht jedem Tür und Tor öffnen möchte. Mal sehen, vll. ein privates WiFi mit Router zwischendrin... Grüße, Andi
Hi Andi, du könntest ja ein XBEE Modul nehmen. Wenn du noch kein XBEE hast, dann natürlich 2. Da ist die Sicherheit zwar nicht unbedingt höher, aber das ist nicht so verbreitet. Gruß Christian
Hi David,
Zeit/Datum stellen:
02[04] 80 0c 28 00 -> 03[04] 00 0c 28 00 zeit auf 12:40
02[09] 81 df 07 08 08 04 00 00 00 -> 03[06] 00 df 07 08 08 04 datum aud
8.8.15 formatbyte: bit0 1-12h/0-24h, bit1+2 0-JMT/1-MTJ/2-TMJ,
2015. 8. 8. fo
02[09] 82 07 04 0f 00 14 01 04 00 -> 03[09] 00 07 04 0f 00 14 01 04 00
sprache DE
Gruß
Christian
Angehängte Dateien:
-

IMG_0297.JPG
140 KB -

IMG_0298.JPG
95 KB

Die Schreibkommandows scheinen durch Bit7 im Kommando gekennzeichnet
sein. Hier Beispiele:
02[02] 88 00 -> 03[02] 00 00 ohne schleife
02[02] 88 01 -> 03[02] 00 01 mit schleife
02[02] 8f 01 -> 03[02] 00 01 ECO on
02[02] 8f 00 -> 03[02] 00 00 ECO off
02[09] 82 09 08 0f 00 14 01 04 00 GER
02[09] 82 07 04 0f 00 2c 01 08 00 Greek
02[07] 84 b3 24 01 1e 03 00 sec low
02[07] 84 b3 24 01 1e 07 00 sec med
02[07] 84 b3 24 01 1e 3f 00 sec high
04[06] 82 02 00 00 00 00 -> 05[06] 00 02 00 00 00 00 korridor
schmal
04[06] 82 02 00 05 00 00 -> 05[06] 00 02 00 05 00 00 korridor
mittel
04[06] 82 02 00 0f 00 00 -> 05[06] 00 02 00 0f 00 00 korridor
breit
04[07] 83 01 02 0d 00 00 00 -> 05[07] 00 01 02 0d 00 00 00 fernstart1
nie ,15m
04[07] 83 01 02 0d 00 14 01 -> 05[07] 00 01 02 0d 00 14 01 fernstart1
selten (20%), 15m
04[07] 83 01 02 0d 00 32 01 -> 05[07] 00 01 02 0d 00 32 01 fernstart1
mittel (50%), 15m
04[07] 83 01 02 0d 00 50 01 -> 05[07] 00 01 02 0d 00 50 01 fernstart1
oft (80%), 15m
04[07] 83 01 02 0e 00 50 01 -> 05[07] 00 01 02 0e 00 50 01 fernstart1
14m
nr .. dist. %. on
04[04] 90 04 01 00 -> 05[03] 00 04 01 schleife überfahren 26 cm
04[04] 90 fa 00 00 -> 05[03] 00 fa 00 schleife überfahren 25 cm
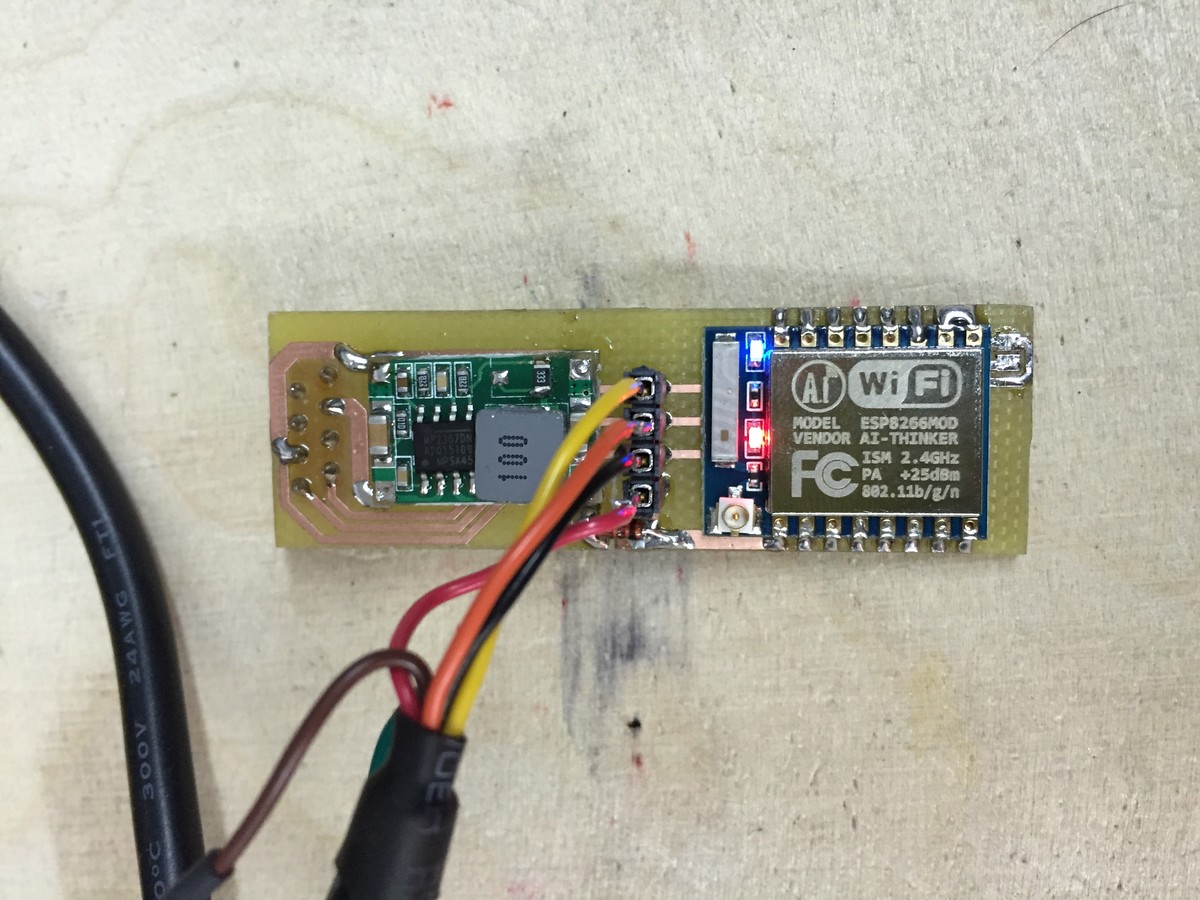
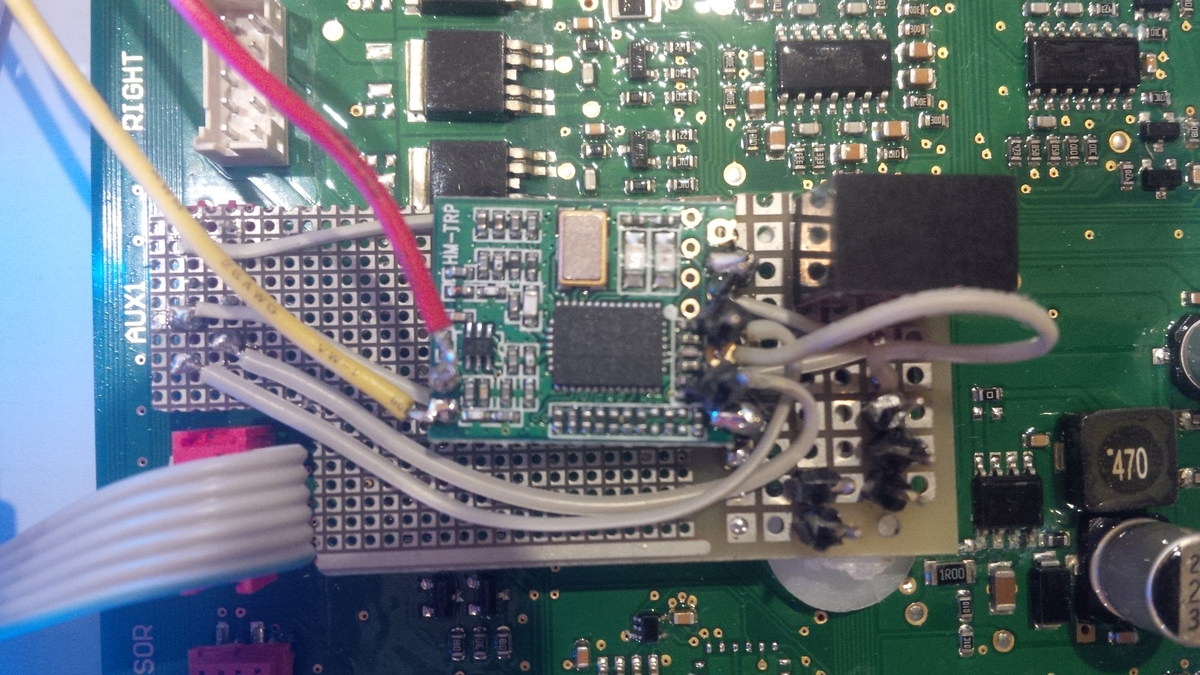
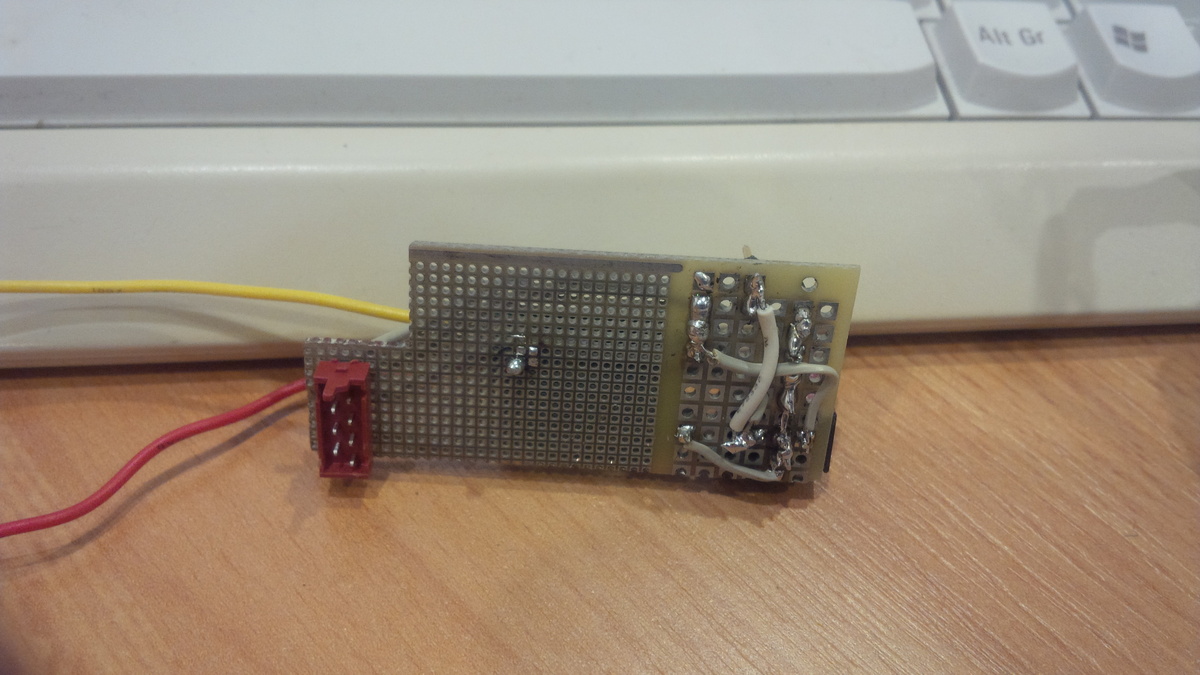
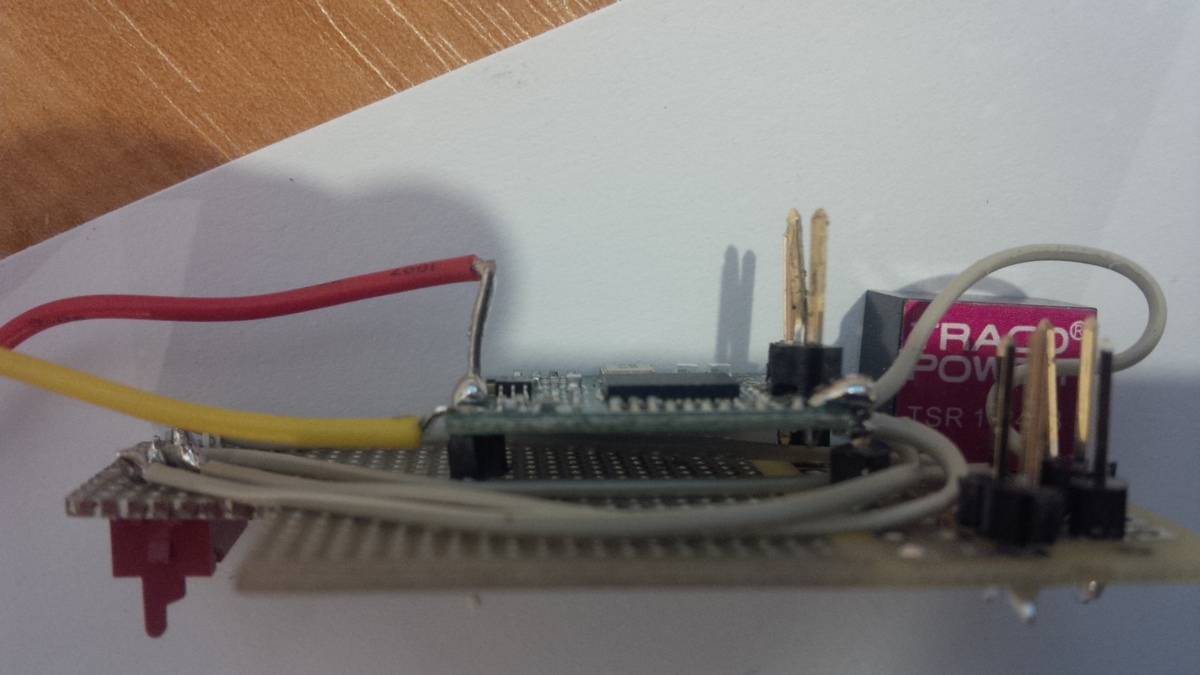
Zum Analysieren hab ich einen 'Interceptor' eingebaut. Basis AtXMega, 4
UARTs: MCB, MMI, AUX, ESP-03
Auf dem ESP ein kleines LUA script zum steuern. Der XMega nimmt die
Pakete vom MCB/MMI entgegen, schickt sie weiter an MMI/MCB und sendet
sie auch über den ESP-03 zum Monitor. Es können auch beliebige
Bytefolgen über eine der Schnittstellen gesendet werden oder die
Kommunikation unterbrochen werden.
Bei Interesse sagt Bescheid.
Gruß
Christian
Abend! OK - mit den Erkenntnissen brauche ich jetzt kein grobes Analysetool mehr bauen. Das würde uns nicht wirklich weiter bringen. Die Idee mit dem ESP zum banalen Anbinden finde ich mittlerweile auch OK. Offen wäre meiner Meinung nach noch die Übertragung ins Hausnetz. Von sowieso vorhandenem WiFi über POE-WiFi, Nutzung eines Open-WRT oder Zwischenschalten eines Raspberry ist alles drin. Aus meiner Sicht ein Traum wäre natürlich die Schaffung einer WLAN-Bridge und Weiterverteilung über Powerline. Wenn man bei den ESP noch die Signalübertragung einschränken kann, ist man Sicherheitstechnisch auch sauber... Ich bin elektronisch nicht sooooooo fit, hab aber einigermaßen Ahnung von Linux, FHEM und KNX. Eine Anbindung per Linux an ein KNX-System oder direkt an FHEM kann ich mir gut vorstellen zu realisieren. Mein Appell: wie können wir uns hier ein wenig organisieren? Ziel sollte ja eine Lösung nach dem Winter sein :-) Grüße, Andi
ich habe auf dem ESP-03 einen LUA telnetd laufen. Das ist zum Experimentieren erst mal schön einfach. Den könnte man sicher auch erweitern um ein wenig mehr Usability zu erreichen. Da könnte ja neben eines binären API auch ein Text API eingebaut sein um z.B. # telnet mower 1234 mode manual ok quit Sollte machbar sein, da die binären Kommandos ja immer mit einem Byte < 65 starten und somit eine Unterscheidbarkeit gegeben ist. Gruß Christian
nebenbei muss ich mich korrigieren: auf dem Board ist natürlich ein ESP-01
Hallo Zusammen, ich habe Zugriff auf eine Professionelle Leiterkarten Fräse (Protomat). Ich kann grössere Menge Leiterkarten herstellen. Ich bin Elektrotechniker und entwickle Leiterkarten. Diese Leistungen kann ich einbringen. Ich würde mich erstmal an die Doku machen. Wobei sich erstmal die Frage stellt was ist alles möglich ? Batterie Zustand erkennen ? Welcher Fehler gibt es alles ? Wie starten ich den Mäher ? Wie wechsle ich den Zustand AUTO/MAN/HOME ? usw Dafür benötige ich erstmal jede Menge Info´s. Die Frage ist ,muss das noch herausgefunden werden? Oder können wir hier unser Wissen zusammentragen. Im Anschluss daran würde ich ein simple Layout machen mit einem Esp 05. Der hat die Möglichkeit eine externe Antenne Anzuschließen. Also ein direkter WLAN-UART Umsetzer ohne Mikrocontroller zusätzlich. So wurde das auch schon bei einem ähnlichen Projekt der Generation 2 Mäher umgesetzt, nur die verbauten Teile waren da viel teurer. Das ganze dann als einfache HuckePack Karte. Das könnte ich als fertig bestückte Karte für die Community anbieten. Das wäre dann vom Einbau her Plug and Play. Ich beschäftige mich erstmal heute Abend mit den Info´s die ich von Chris bekommen haben. Zum Thema Sicherheit: Man sollte natürlich wenn man externe Geräte im WLAN hat dieses mit geeignetem Maßnahmen absichern. Man könnte mit viel krimineller Energie an das WLAN Passwort kommen wenn man den Mäher in seine Hände bekommt. Ich habe von so einem schönen Fall gehört wo sich jemand zu Absicherung seines Hauses teure Fenster/Türen mit Folie Pilzkopfverriegelung, Gitter vor den Kellerfenstern usw. hat einbauen lassen. Da sind die Diebe verkleidet als Schornsteinfeger einfach durch´s Dach gegangen. Am helllichten Tag. Dachpfanne wegschieben und ein Loch in die Folie/Rigips schneiden. Soll heißen mit genug krimineller Energie kommt man überall rein/dran:-) Also wenn es um Sicherheit geht bitte einen separaten Thread zum diskutieren öffnen um diesen Thread nicht zu unübersichtlich werden zu lassen. Gruß David
Mahlzeit! Passt, konzentrieren wir uns auf eine Anbindung per WLAN. Wie das dann ins Haus kommt, muss jeder selbst lösen :-) Ich habe kein größeres Problem damit, wenn wir die Telegramme "nur" als serielle Kommandos ohne weiteres Protokoll auf ein (W-)LAN legen. Zwei Optionen, die ich anbieten kann, zu realisieren: 1. Anbindung direkt an ein KNX-Netzwerk 2. Integration in FHEM (Wers nicht kennt - bitte googlen. Kann einiges und ist offen: http://fhem.de/Heimautomatisierung-mit-fhem.pdf) Mir persönlich würden fürs erste die folgenden Möglichkeiten genügen: - Fahre nach Hause - Auto-Modus an/aus - Aktueller Status (mäht lädt manuell aus / Fehler) - Aktueller Fehlercode (idealerweise natürlich mit Beschreibung - auch wenn das hart wird...) Unterstelle ich einen virtuellen seriellen Port unter Linux ohne weitere Protokolle könnte ich bereits auf Basis FHEM ein erstes Modul bauen... Dieses sollte dann die obigen Kommandos im Klartext unterstützen und die restlichen Telegramme mitloggen... Das FHEM läuft dann auf einem Raspberry Fritzbox OpenWRT und stellt die Informationen zum Einen als Logfile und zum Anderen per HTML-Seite zur Verfügung... Bei der von David beschriebenen HW-Lösung wär ich jedenfalls dabei - Lösung gefällt mir (schön minimalistisch :-)). Wollen wir so starten? Grüße, Andi P.S.: Hab zusätzlich noch ne zweilagige Holzverschalung unterm Dach. Da brauchts schon ne laute Säge :-P. Und nun genug davon...
Hi Chris, jetzt habe ich die Logik verstanden:-) Ich gehe davon aus das du einen anderen Mäher als den r40li hast. Das Kommando für die Sprachumstellung ist bei mir anders. Die Abfrage aber die richtige, so konnte ich mir das richtige Kommando herleiten. Zusätzlich musst nach der Sprachumstellung das Gerät neu gestartet werden damit er dieses auch wirklich umsetzt. Vielleicht gibt es dafür auch einen RESET Befehl ? Unfreiwillig hast du wohl deinen Pin verraten. Weil in dem Kommando sec low dieses enthalten sein muss:-) Dieses habe ich festgestellt weil bei der Abfrage am Gerät zusätzlich die PIN eingeben werden muss und bei der Abfrage des Datensatz 00 01 an der Stelle ist. Das war für mich gerade ein richtig schönes AHA Erlebnis;-) Ich mache mich an die Doku. Gruß David
oops, dann gibts wohl ab heute eine neue, danke für den Hinweis.
Ich hab einen 305
noch ein paar logs und Datenpositionen. Wenn denn schon mal einer Doku
schreiben will...
06 timer
06[08] 01 01 00 00 00 00 00 00 abfrage start T1
06[08] 01 81 00 00 00 00 00 00 abfrage stop T1
06[08] 01 02 00 00 00 00 00 00 abfrage start T2
06[08] 01 82 00 00 00 00 00 00 abfrage stop T2
06[01] 04 scheint timer zu löschen
06[01] 05 -> 07[0a] 00 00 00 00 00 00 70 bc c8 55 next start
10.8. 15:00
0e[01] 01 -> 0f[03] 00 00 00 Einstellungen rücksetzen?
0e[01] 02 -> 0f[03] 00 00 00 Home
0e[01] 03 -> 0f[03] 00 00 00 Man
0e[01] 04 -> 0f[03] 00 00 00 Auto
10 xx motor test (01 mäh, 02 rad)
10[03] 01 54 0b -> 11[01] 00
rpm..
10[05] 02 0a 00 0a 00 -> 11[01] 00
ra left. right
12[01] xx - status (01, 81)
12[01] 01 -> 13[17] 00 03 0b 06 02 00 00 f0 c7 c4 55 02 69 7c c2 55 03
01 23 00 00 3a 00
next start. time.......
14[01] xx - sensoren (01 bat, 02 radmot., 03 messerm., 04 kipp/stoss,
06, 15 schl., 16 schl.)
14[01] 01 -> 15[15] 00 05 4f 86 04 ac ff f9 00 b0 04 00 00 00 00 00 00
0c fe 00 00
cap.. curr. temp.
14[01] 02 -> 15[0f] 00 00 00 00 00 08 00 00 00 00 00 0c 00 00 00
15[0f] 00 14 00 d0 ff 1d 00 14 00 d2 ff 22 00 00 00
pwr%r spedr pwr%l spedl
pwr%r = power in % rechts
spedl = speed llinks
14[01] 03 -> 15[07] 00 00 00 0c 00 ce 02
15[07] 00 ea 06 f3 00 ce 02
rpm.. curre .....
14[01] 04 -> 15[0c] 00 00 00 fd ff 2a 00 f4 03 00 2d 01
st an nei-X nei-Y z?...
14[01] 05 -> 15[04] 00 00 01 00 ?
14[01] 06 -> 15[03] 00 00 00 ausfahrstrecke
16 irgendwas mir versionsständen
18 : statistic (00 00 00 bat, 02 xx 00 suchzeiten x, 03 xx 00 mähzeiten,
04 xx 00 bat. cap., 05 xx 00 mitteil. x)
18[03] 00 00 00 -> 19[11] 00 03 01 f6 00 0d 00 60 01 15 01 45 e9 f1 52
21 00
runti mä-ti su-ti la-ti #ladg prod_date..
errors
Gruß
Christian
Hi Chris, jetzt habe ich erstmal ein kleines Problem. Ich hatte bei meinem Mäher den Deckel abgeschraubt um ein USB-RS232 Kabel anzuschließen. Dadurch das der Deckel nicht montiert ist kann ich manche Funktionen nicht ausführen, wie z.b. Mähmotortest. Wenn ich mein WLAN Modul anschliesse habe ich das Problem das die 3,3V nicht durchgehend anliegen (wie du bereist geschrieben hast). Das heißt ich muss mit den Zeug was ich hier rumliegen habe einen 3,3V Regler zusammenlöte, das schliesse ich dann an Pin 7 an. Zweites Problem ist das der Akku langsam leer wird. Ich habe die Ladestation von meinem Mäher immer fest draussen stehen. Ich habe sie so umgebaut das sie komplett auf Solar Läuft. Dadurch brauchte ich kein Erdkabel legen. Dafür wollte ich nochmal eine Anleitung schreiben in einem separaten Thread, wenn jemand Interesse hat. Für weitere Versuche muss ich die erstmal rein holen. Gruß David
Hallo Zusammen, ich bin schon fleissig dabei und möchte hier mal einen kleinen Vorgeschmack bieten. Gruß David
Hi Chris, da habe ich schon ein paar Fragen: 1. Was bedeuten die Befehle mit und ohne Schleife? Ich habe auf meinen r40li dafür keine Einstellung, das muss nichts bedeuten. Kann sein das man es trotzdem einstellen kann. Die Korridorbreite kann man normalerweise beim r40li nicht einstellen. Aber über die serielle Schnittstelle schon :-) 2. Kannst du mir ein Beispiel geben wie ich einen Timer neu setzten kann ? Ein einfacher String ohne Erklärung genügt mir. 3. Bist du sicher das du den Befehl für den Motortest richtig aufgeschrieben hast ? Bei mir piept er 3mal aber der Motor startet nicht. Über das Service Menü am Mäher klappt es. Das wars erstmal mit meinen Fragen. Weitere werden bestimmt folgen. Gruß David
Saugeil! Mal sehen, wann ich zum Testen an meinen 310er Husky komme... Ich hab nichts mehr diesbezüglich gehört: Anbindung per virtueller, serieller Schnittstelle an FHEM in Ordnung? Grüße!
Hallo Andi, die WLAN zu UART Schnittstelle kann man per UDP Paket ansprechen. Wenn du ein Modul für FHEM schreiben möchtest muss du den Port für UDP einstellbar machen. Ich benutze zum testen das Programm Packet Sender. Wenn du fit im Programmieren bist kannst du vielleicht ein kleines Testprogramm schreiben :-) ? Momentan habe ich meinen r40 per USB-RS232 FTDI Kanel angebunden. Ich arbeite mit dem Programm hterm. Ich muss jedesmal den String im editor zusammenschreiben und gehe dann auf diese Seite : http://tomeko.net/online_tools/crc8.php?lang=en die mir den CRC berechnet. Schön wäre es ein Programm zu haben wo man direkt das Kommando und die Datenbytes eingibt und der automatisch die passende Zeichenkette daraus bildet und abschickt. z.B. Kommando = 06 Datenbytes = FF FF FF und gesendet wird dann: 02 06 03 FF FF FF 72 03 Das wäre 02 (muss immer zuerst gesendet werden). 06 für das Kommandobyte und 03 weil 3 Datenbytes folgen. 72 ist die Checksumme aus 06 03 FF FF FF .Und ganz zum Schluss noch 03. Darunter ein Fenster was die Antwort in Hex Form darstellt und nach ca 20ms eine neue Zeile beginnt wenn eine Antwort Zeichenkette gekommen ist. Das kann man bei hterm auch so einstellen. Das macht das ganze sehr übersichtlich. Ich bin derweil weiter fleißig und mache die Doku fertig. Ich lade sie hoch wenn ich fertig bin um den Thread übersichtlich zu halten. Im neuen Jahr habe ich wieder Zugriff auf die Fräse und mache eine fertige Platine für den WLAN-UART Umsetzer, da muss zusätzlich ein Spannungswandler mit drauf. Ich nutze dafür einen Sparsamen LT1934. Wenn einer keine bessere Idee hat? Gruß David
Morgen! Anbei eine draft-Version zum Debuggen. Muss ich die Tage noch hübsch machen und Logging hinzufügen. Im Prinzip tut das Teil... Feedback bitte am liebsten per PN... Grüße, Andi
Hallo Andi, ist das für Linux ? Wie startet man das Programm ? Ich kann keine exe finden ???? Gruß David
Servus! Sorry, ein wenig kurz gefasst... Bitte eine Java-JRE 1.6 installieren. Die Jar kann dann wie eine exe gestartet werden... http://www.oracle.com/technetwork/java/javase/downloads/java-archive-downloads-javase6-419409.html#jre-6u45-oth-JPR
Hallo Andi, erstmal Hut ab für deine Leistung. Programm funktioniert 1A:-) DAUMEN HOCH. Ich habe die JAVA Runtime Engine installiert und dann Rechtsklick auf die .jar Datei. -> Öffnen mit -> JAVA. Bei mir ist die Endung .jar mit WinRAR verknüpft. Gruß David
Danke für die Blumen! In schön und mit Logging kommts nach Weihnachten :-P
Hi David, > 1. Was bedeuten die Befehle mit und ohne Schleife? Ich habe auf meinen > r40li dafür keine Einstellung, das muss nichts bedeuten. Kann sein das > man es trotzdem einstellen kann. Die Korridorbreite kann man > normalerweise beim r40li nicht einstellen. Aber über die serielle > Schnittstelle schon :-) Der 305 kann wohl auch ohne Schleife betrieben werden. Ich denek die Funktionalität des Hauptrechners wird in den Mähern gleich sein, nur das MMI hat nicht alles freigeschaltet. > 2. Kannst du mir ein Beispiel geben wie ich einen Timer neu setzten kann > ? Ein einfacher String ohne Erklärung genügt mir. ich bin mir jetzt nicht ganz sicher, glaube aber das hier war es: 06[08] 02 01 10 00 00 35 a0 05 -> 07[09] 00 01 10 00 00 35 86 01 01 16:00 DM 06[08] 02 81 11 00 1e 35 a0 05 -> 07[09] 00 81 11 00 1e 35 86 01 01 17:30 DM DM ist Day Mask? ich glaub ich hatte Mo,Mi,Fr,Sa an. > 3. Bist du sicher das du den Befehl für den Motortest richtig > aufgeschrieben hast ? Bei mir piept er 3mal aber der Motor startet > nicht. Über das Service Menü am Mäher klappt es. Der Motortest Befehl muss immer wiederholt werden. Ich weis jetzt nicht die Frequenz, versuch 2x pro Sekunde. Damit kann man den dann auch per Fernbedienung fahren lassen. Gruß Christian
Hallo Chris,
Die Motorentest funktionieren.
Die Frage ist wie ich das mit den Rädern interpretieren soll. Man Kann
das jeweilige Rad bremsen, vor und zurück fahren. Ich dachte erst eine
negative Zahl wird durch das Zweierkompliment dargestellt. Klappt aber
nicht. Kannst du mir dafür noch ein oder 2 Beispiele geben. Oder eine
kurze Erläuterung.
Das mit den Timern ist klar und in der Doku übernommen.
Da habe ich noch eine Frage hierzu:
06[01] 05 -> 07[0a] 00 00 00 00 00 00 70 bc c8 55 next start
10.8. 15:00
Ich weiss nicht wie ich die Antwort interpretieren soll ? Ich kann das
auch nicht mit meinem Mäher nachstellen.
Schöne Feiertage euch allen und einen guten Rutsch.
Gruß
David
Hallo Chris,
und noch eine Frage hierzu:
12[01] xx - status (01, 81)
12[01] 01 -> 13[17] 00 03 0b 06 02 00 00 f0 c7 c4 55 02 69 7c c2 55 03
01 23 00 00 3a 00
next start. time.......
Sag mir kurz wie das zu interpretieren ist.
Und noch eine Info:
14[01] 05 -> 15[04] 00 00 01 00 Bedienerklappe ZU
14[01] 05 -> 15[04] 00 00 01 01 Bedienerklappe AUF
Gruß
David
Hallo Männer, also beim 310er Husky scheint alles ähnlich zu funktionieren. Mit einer Ausnahme - es muss der Aux-Port 2 hergenommen werden... Hat schon jemand ein Statusbit für "in Betrieb" und "Mäht nicht wg. Fehler" gefunden? Zweites Thema: kann es sein, dass das gute Stück ohne Ladestation nicht läuft? Bei mir steht dauernd "Kollision aktiv" Im Anhang eine etwas aufgehübschte Toolversion... Es wird nun ein Log und ein Trace angelegt. Im Trace werden alle Bytes mitgefangen (raw). Bei Problemen bitte das logfile zu meinen Händen... Es handelt sich um eine Jar-Datei. Also bitte einfach mit einer JRE 1.6 öffnen und gut :-) Grüße, Andi
Hi David, wissen tu ich das auch nicht. Das 12 01 scheint die Info "Next start" und die Aktuelle Zeit abzufragen. Das MMI schickt die Abfrage alle Sekunde. Immer mal fragt es auch 12[01] 81, was aber die gleiche Antwort ergibt. 13[17] 00 03 0b 06 02 00 00 f0 c7 c4 55 02 69 7c c2 55 03 01 23 00 00 3a 00 pos1: fast immer 01, aber immer mal 03 pos2: wenn p1=01 dann 00 sonst 00, 01, 09, 0b pos3: wenn p1=03 dann 06 sonst 05 pos7-10: nächste Startzeit (epoch) pos12-15: aktuelle Zeit (epoch) pos16: war immer 03 oder 04 pos18: zählt runter pos21: zählt langsam hoch Gruß Christian
Guten morgen! Aaaalso, mit meinem 310er Husky hab ich nun einen Testparkours im Keller aufgebaut. Grundsätzlich läuft er, Kommunikation steht (kabelgebunden) auch. Folgende Statusinformationen hab ich rausgefummelt: zyklische Abfrage von 12 01 ergibt 00 01 Parken 00 04 Laden 00 02 02 06 Mähen Auto Mähwerk aus (Suchen?) 00 02 01 06 Mähen Auto Mähwerk ein 00 02 01 07 Mähen Manuell Mähwerk ein 00 05 Ausfahren/Suchen ? 00 07 00 06 01 Fehler außerhalb Mähbereich (nach Quittierung status "Parken") Um weitermachen zu können (erste Test-Applikation) brauche ich noch die Information über Start / Stopsignal. Betriebsart umschalten zwischen home man Auto geht, aber Starten kann ich (noch) nicht... Kann mir jemand die Info zur Verfügung stellen? Danke und Grüße, Andi
Einen hab ich noch: 00 07 00 05 13 Fehler Mäher gestoppt (nach Quittierung status "Parken")
Hallo Andi, kann man das mit den Starten nicht so erledigen das man den Timer einfach von 0:01 bis 23:59 stellt und dann über die Funktionen Home und Auto ihn fahren lässt ? Starten sollte er doch nur wenn der Akku voll ist und das macht er doch dann auch so. Zu der Abfrage 12 01 bei mir kommt da folgendes raus: CMD: 13 LEN: 17 DATA: 00 01 00 05 12 24 00 F0 B3 01 00 02 9A 5F 01 00 5B 03 3A 00 00 B6 06 sehe ich das richtig das du dich z.B beim parken nur auf die ersten 2 Bytes beziehst ? und nicht die Antwort nur 2 Bytes hat ? Ich habe noch ein kleines Problem mit deinem Programm wenn ich für den Motortest z.b. schnell hintereinander auf senden klicke kommt irgendwann in dem received fenster nichts mehr an. Gesendet wird aber weil der Mähmotor sonst stehen bleibt. Quittieren machst du am Mäher selber oder gibt es dafür auch ein Telegramm ? Kannst du noch die Telegramme für Mähmesser blockiert und angehoben herausfinden ? Gruß David
ist das doch unterschiedlich oder war das mit dem Datum bei mir Zufall? also nächste Startzeit scheint es nicht zu sein. Kann das das nächste Aufwachen sein? Ist es bei dir 1970 oder hat der Gardena kein Jahr oder ein anderes Startjahr? 00 01 00 05 12 24 00 F0 B3 01 00 02 9A 5F 01 00 5B 03 3A 00 00 B6 00 - ok 01 - parkt 05 12 24 00 - ? F0 B3 01 00 - 14 Jul 1970 21:27:15 02 - ? 9A 5F 01 00 - 14 Jul 1970 15:18:55 5B 03 3A 00 00 B6 - ? Gruß Christian
Hi Andi, haben wegen der Doku meinen Mäher zurückgesetzt. Die Daten sind richtig:-) Gruß David
Hallo zusammen! @David: Da hast Du theoretisch recht, kann man so machen. Ich würde aber lieber im Timer-Modus fahren. Wenn meine Frau in den Garten geht, schaltet Sie das Teil einfach am zentralen Bedienpanel aus. Habe ich momentan auch schon so gelöst. Allerdings unterbreche ich nur die Spannung, und damit läuft der Mäher nicht mehr selbsttätig los. Und beim experimentieren hab ich gemerkt, dass das gute Stück zwar wohl die Betriebarten umschaltet, aber eben nicht aktiv in diese wechselt, sondern auf ein Start-Kommando wartet. Der Trigger im "Normalbetrieb" ist Start und Klappe zu. Beispiel: Mäher mäht oder steht sinnlos rum (parkt). Ich schicke über RS232 "home". Der Mäher nimmt das an (Antwort 0E 00 00 00). Passiert aber nichts. Mache ich den Deckel auf, steht auf dem Display "Home - Start drücken". Nach dem Start-drücken schreibt er dann (logischerweise) noch "Klappe zu". Mit der Bytezählerei liegst Du richtig - die Antwort hat immer 17 (oder 19?) Bytes. Ich hab nur auf die geschaut, die sich ändern. Wg. Progrämmchen...das ist recht flach programmiert. Kann sein, dass sich die Empfangsroutine verläuft, wenn die Nachrichten zu schnell ankommen. Ich bau noch einen Timer ein... Zum Quittieren hab ich noch kein Telegramm gefunden - mache ich am Mäher selbst. Die von Dir angesprochenen Fehler versuche ich morgen nachzustellen. @Christian: Die vier Byte nach dem "Mäherstatus" variieren. Kann ich mir noch nicht so recht erklären. Wird hier recht deutlich: 00 02 01 06 Mähen Auto Mähwerk ein 00 02 01 07 Mähen Manuell Mähwerk ein 00 02 02 06 Mähen Auto Mähwerk aus (heißt glaub ich suchen) Oder hier: 00 07 00 05 13 Fehler außerhalb Mähbereich 00 07 00 06 01 Fehler Mäher gestoppt Grüße, Andi
Hallo Zusammen, ich bin jetzt soweit durch. Es wird bestimmt noch die ein oder andere Ergänzung geben. Ich habe noch ein paar zusätzliche Sachen herausgefunden. Ein Blick lohnt sich. Sollte jemand Fehler finden einfach hier melden und sie werden eleminiert. @Andi Vielleicht kann Chris da weiterhelfen. Dein Problem versteh ich. Ich freu mich schon auf das erste richtige Testprogramm:-) Fehlercode müsste ich noch ein paar haben um das Dokument zu erweitern. Schönen Abend noch:-) David
Morgen David! So, nochmal ein paar Anmerkungen... In der Übersicht für das Kommandobyte: 00 = IO 03 = Fehler bei unbekannter Nachricht 05 = Autorisierung NIO Fehler: 00 07 00 06 01 00 Fehler Mäher gestoppt 00 07 00 06 01 27 Fehler Mäher gekippt 00 07 00 05 22 27 Fehler Mäher angehoben 00 07 00 05 13 00 Fehler außerhalb Mähbereich nach Klappe öffnen und PIN 00 07 00 07 12 00 Fehler Schneidsystem blockiert vor Klappe öffnen und PIN 00 07 00 05 12 00 Fehler Schneidsystem blockiert nach Klappe öffnen und PIN 00 07 00 05 12 00 Fehler Mäher angehoben nach Klappe öffnen und PIN --> 07 00 05 12 00 - unquittierter Fehler steht an, Warnung ist nach Autorisierung aus --> nach Quittierung ist jeweils der "normale" Status wieder aktiv Das Rätsel um das Zustandsmodell ist auch gelöst. MMI und Aux sind hinsichtlich Stop verodert, und hinsichtlich Start verundet. Bedeutet, wenn die MMI im normalbetrieb ist (Modus egal), gilt: 0e 00 Stop auslösen 0e 01 Start 0e 02 Home 0e 03 Manuell 0e 04 Automatik 0e 05 Suchen (Sinn fragwürdig) Wunsch neue Betriebsart wird sofort umgesetzt, wenn der Mäher nicht in Stop ist. Also Zustand Mähen - 0e 02 -> Zustand parken. Wenn der Mäher gestoppt ist, brauchts hernach noch ein 0e 01. Wichtig: Wird über MMI gestoppt, kann der Startbefehl nicht nur über Aux gegeben werden, sondern muss auch an der MMI erfolgen! Grüße, Andi
Hallo Andi, die Info´s füge ich der Doku bei. Wenn du noch mehr hast immer raus damit. Ich bestelle heute schonmal die ersten Bauteile für die WLAN Huckepack Karte für den Mäher. Viel muss ja nicht drauf ein ESP ,ein Spannungswandler ,eine Debug Schnittstelle und der passende MicroMatch Stecker. Ich habe mich für den ESP07 entschieden. Man kann ihn updaten und er unterstützt die Möglichkeit ihn in einen Modus zu schalten das er direkt die seriellen Kommandos als UDP raus schickt und auch andersrum. Das Problem ist das wenn man Einstellungen am Modul vornehmen muss dieses erst ausbauen muss und über die Debug Schnittstelle dieses wieder ändern muss. Ich werde meinen Mäher einen separaten AP verpassen. Ich würde dir Andi und Chris kostenlos eine zur Verfügung stellen wenn ihr Interesse habt ? Gruß David
Hallöchen! Sehr gerne - kostenfrei muss aber nicht sein. Können wir gerne per Mail abwickeln... Anbei eine neue Toolversion. Zyklisches senden funktioniert. Motorentest mit interval = 40 (= 400ms) funktioniert perfekt! Da FHEM in Perl geschrieben ist, muss ich jetzt erstmal eine Windows-Fernbedienung auf perl-Basis bauen (will nicht am Raspberry debuggen). SOnst mach ich die Arbeit 2 mal. Wird ne Weile dauern! Grüße, Andi
Hi Andy, als Java Mensch könntest du ja auf openHAB wechseln :) Gruß Christian
ABend! Nene - in FHEM bin ich eingearbeitet :-) Das werf ich nicht alles weg :-P
ich hab gerade noch mal den 'Interceptor' eingebaut und Start gedrückt: 0e[01] 10 -> 0f[03] 00 00 00 start -> ok 0e[01] 10 -> 0f[03] 00 80 00 start -> ausserhalb 0e[01] 10 -> 0f[03] 00 70 00 start -> stoß der Stop bei Klappe auf scheint über ein extra Pin von MMI weitergereicht zu werden. Gruß Christian
Servus! So, ich war nicht ganz untätig - Protokoll in FHEM ist implementiert. Im Laufe der nächsten Woche müsste ich ein erstes Applikationsbeispiel fertig haben... Fangt schon mal an, euch mit FHEM vertraut zu machen :-) Das entsprechende Modul zum reinkopieren verteile ich dann hier... http://fhem.de/fhem.html http://fhem.de/fhem.html#Installation http://fhem.de/commandref_DE.html http://www.fhemwiki.de/wiki/Konfiguration Grüße, Andi
Hallo Chris, ich habe jetzt alle Bauteile hier und kann nächste Woche die Leiterkarten fertigen. Ich habe nur ein Problem. Wenn ich den Pin 7 anzapfe für die 18V dann ist die Spannung immer vorhanden. Das Problem ist im Winter würde der die vollgeladene Batterie belasten. Das finde ich keine schöne Lösung auch wenn die Schaltung fast keinen Strom verbraucht. Da ist ja noch ein Pin an dem im eingeschalteten Zustand +5V anliegen. Weisst du ob die durchgehend anliegen oder so wie die 3,3V nach einigerzeit nicht mehr vorhanden sind? Gruß David
Morgen! Sicher? Ich glaube, die 18V werden über den Hauptschalter weggenommen... Evtl. die sichere Lösung: Jumper...Dann könnte man auch noch eine Leitung zum Hauptschalter legen, wenn's wäre... Grüße, Andi
Hallo Andi, das ist sicher. Ich habe die Sachen auf ner Lochrasterplatine zusammengelötet und ausprobiert. Ich habe dafür die 5V vom Stecker genommen, diese lassen sich über den Hauptschalter abschalten. Ich habe das Telegramm gesendet damit der Mäher auch ohne Schleifensignal arbeitet (siehe Doku) und dann fahren lassen. Während er gefahren ist habe ich den Mäher fortlaufend angepingt. 5 Minuten ohne Probleme. Ab und zu verliert er mal ein Telegramm. Aber sonst lief er durch. Ich weiss aber nicht ob sich das unterscheidet vom Betrieb mit Schleife. Ich konnte auch nicht festellen das die 3,3V nach einiger Zeit nicht mehr vorhanden sind obwohl Chris mir geschrieben hat das ca 1. Minute nach dem Laden diese nicht mehr vorhanden sind. Das einzig kleine Problem ist das, dass ESP Modul wohl nach einiger Zeit in den Schlaf geht wenn man nicht mehr über ihn kommuniziert. Er scheint immer mal wieder aufzuwachen zu schauen ob was da ist. Wenn man ihn fortlaufend anspricht passiert das nicht. Dieses sollte man Softwaretechnisch abfangen in dem wenn man ihn eine Anweisung schickt auch das Antworttelegramm auswertet. Kommt keins sollte man die Anweisung nochmals schicken und erst damit aufhören bis eine Antwort kommt. Wenn 3 sec keine Antwort kommt ist der Mäher nicht vorhanden. Aber wenn das Modul fertig ist (Ich denke im laufe nächster Woche) bekommst du eins und kannst es ausprobieren. Wichtig ist das du ein FTDI Kabel benötigt um das Modul zum ersten Start einzustellen. WLAN SSID ,Passwort ,UDP Ports, IP usw. Aber dafür schick ich dir dann noch eine Anleitung. Gruß David
Hi, das ESP-03 geht mit der NodeMCU Firmware bei mir bisher nie in irgendeinen Sleep, das macht er nur nach einem Sleep Kommando. Das würde auch das Problem mit dem Standby Strom lösen. Der Spannungswandler den ich bisher benutze hat 2mA Ruhestrom. Das hält dann schon ein paar Tage. Ich hab mir eine Schaltung mit einem ESP-03 gebaut die sich selber ausschalten kann, beim Einschalten keine Daten zum Mäher schickt und auch Standby kann. Ich hab auch noch einen Sockel für ein I2C Gyro dran gebaut. Die 3,3V schalten sich scheinbar nach dem vollständigen Laden ab und eine Minute vor dem Losfahren wieder an. Das mit den 5V muss ich noch mal ausmessen. Gruß Christian
Angehängte Dateien:
-

IMG_7492.JPG
250 KB -

IMG_7493.JPG
220 KB -

IMG_7490.JPG
230 KB -

IMG_7491.JPG
220 KB

Hallo Zusammen, ich habe die Leiterkarte fertig. Ich habe ein paar Bilder hochgeladen. Ich nutze die 5V Spannungsversorgung. Chris und Andi wollte ihr beide ein Modul haben ? Natürlich kostenlos zur Funktionskontrolle. Wenn ja PM an mich. Der ESP muss vor der ersten Inbetriebnahme eingestellt werden. Doku folgt. Es wird dazu ein RS232<->USB Kabel benötigt. Ich habe eins von FTDI genommen. Die haben ein Kabel was direkt noch 3,3V liefert. Belegung laut Bild. Wenn sich das Modul im WLAN zu UART Modus befindet muss man um den Modus zu verlassen das Modul neu flashen. Falls das erfordelich ist wenn man z.b. das WLAN Passwort ändern möchte. Darum sind am ende 2 pads die kann man brücken und wenn man dann das Kabel aufsteckt befindet er sich im Prog Modus und lässt sich neu flashen. Er befindet sich dann wieder im Auslieferungzustand. Gruß David
Hallo Freunde der gepflegten Unterhaltung! So, anbei wie versprochen eine erste Testversion. Das geht: - Kommunikation über serielle Schnittstelle (getestet mit Linux VM) - zyklisches Anfragen von 12 01 - Steuern von OE (Auto, home, ...) Das geht (noch) nicht: - Ansteuern von Einzelfunktionen - Anzeige Batteriestatus - PIN senden - Auswertung Zeitstempel von 12 00 So geht's: 1. FHEM installieren http://fhem.de/fhem.html http://fhem.de/fhem.html#Installation http://fhem.de/commandref_DE.html http://www.fhemwiki.de/wiki/Konfiguration 2. Das Modul (86_AutoMower.pm) ins Verzeichnis /opt/fhem/FHEM kopieren 3. in der Kommandozeile von FHEM ein shutdown restart eingeben 4. Folgende Definition in der fhem.cfg anlegen (oder aber im Webfrontend): define myMmower AutoMower /dev/ttyS0 Damit wird dann zyklisch alle 30s der Status abgefragt. Interval ist per Attribut änderbar. Im Klartext angezeigt wird der Mäherstatus, der Messerstatus und, soweit bekannt, anliegende Fehlermeldungen. Grüße, Andi
Angehängte Dateien:
-

Screenshot_AP.PNG
57 KB -

Screenshot_FirmwareWirdInstalliert.PNG
28 KB -

Screenshot_Zeiten.PNG
42 KB -

Robonect_H30x_top.jpg
230 KB -

Robonect_H30x_bottom.jpg
460 KB -

Robonect_H30x.png
590 KB
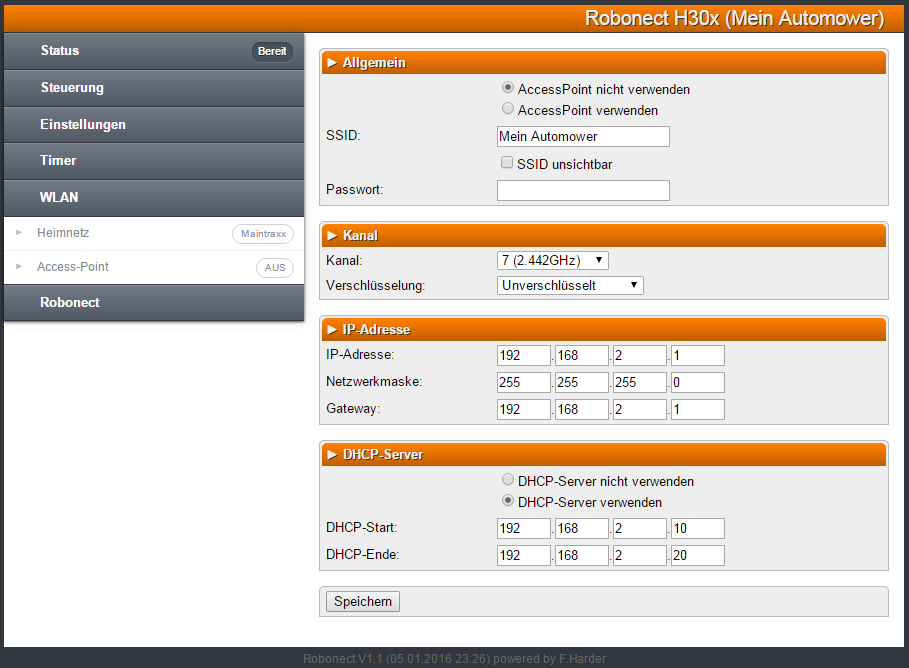
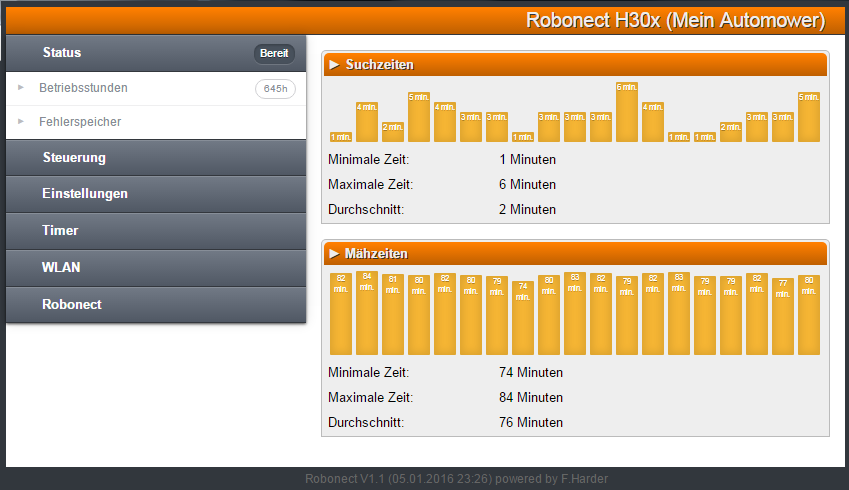
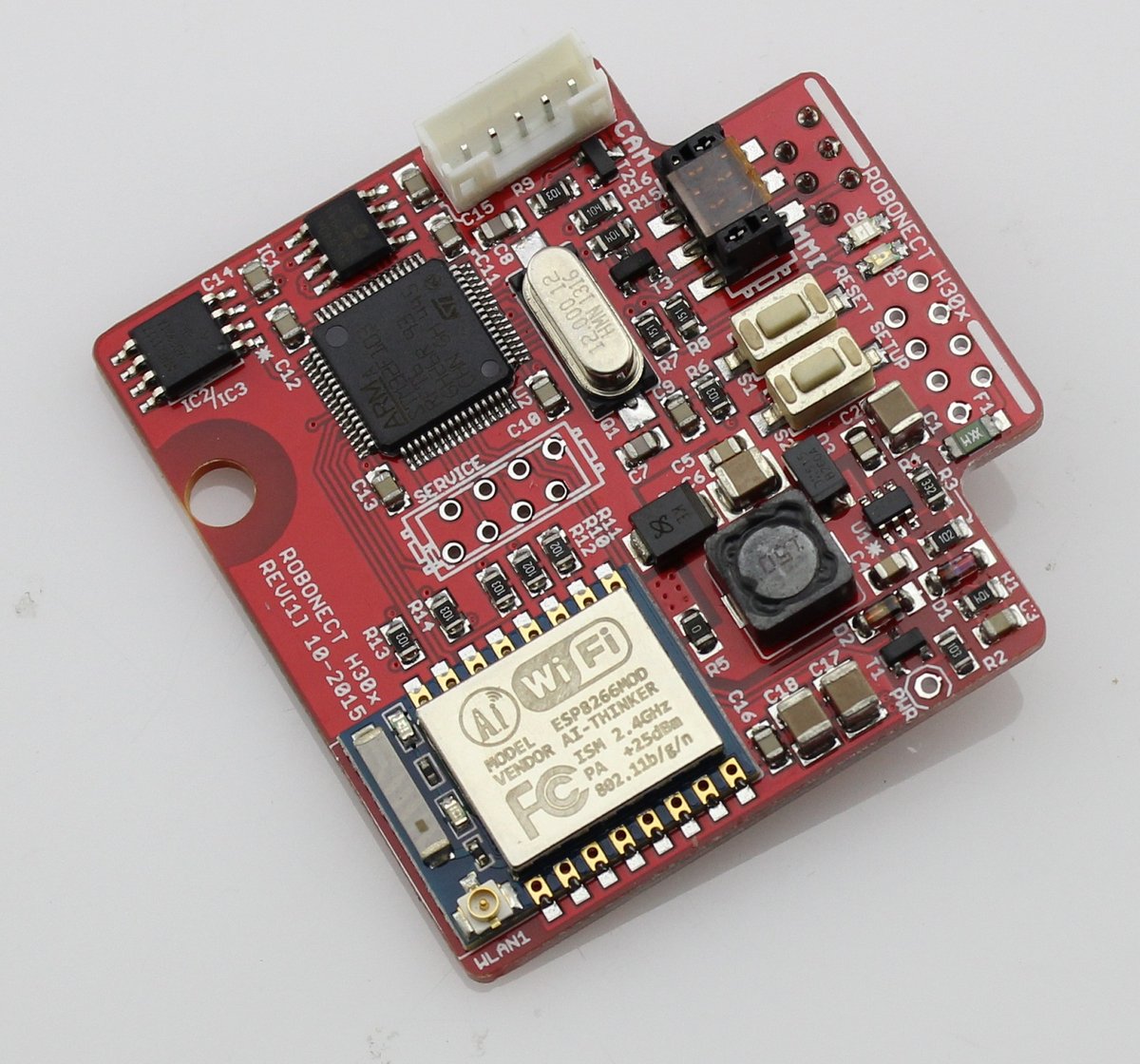
Hier mal das Robonect H30x Modul.
Mahlzeit! In der Tat ein hochinteressanter Thread! Nicht die schlechteste Idee, noch ein paar Layer mehr im Mower zu kapseln. Ich les mich da mal ein - nichtsdestotrotz bin ich auch hier weiter mit dabei. Wahrscheinlich bau ich das Modul dann nochmal komplett anders (zweistufig). Dann bleibt der EInsatz flexibel... @Frederik: ganz einfach - das Projekt ausm Robi-Forum hat Google noch nicht ausgespuckt, als hier schon Betrieb war :-) Grüße, Andi
Frederik schrieb: > Hier mal das Robonect H30x Modul. Hi, wie kann man das kaufen und was ist ca. der Preis ? Der Thread im Roboterforum ist schon echt lang ;-) Danke & Grüße Sascha
Hallo Sascha, die Fragen gehören aber genau dorthin - die wird Dir hier keiner beantworten können... Grüße, Andi
wow, nicht schlecht, warum hat Google uns das vorenthalten? Gruß Christian
Der Thread ist zwar schon ein Zeit nicht mehr aktiv, aber vielleicht hört noch jemand mit: Das Problem: Ich kann mit meiner Hardware die in der Doku beschriebenen Telegramme nicht reproduzieren und möchte mal fragen mit welchen SW-Versionen die beschriebene Lösung von Euch betrieben/getestet wurde. Hintergrund: Also ich habe seit 2013 einen R70Li und hatte vor einigen Wochen einen Defekt an einem Servotreiber wodurch ein Rad nicht mehr angetrieben wurde, ansonsten hat der Mäher funktioniert. Nachdem die Platine 250 EUR kostet dachte ich mir, wenn schon dann schau ich ob ich mit der alten Platine wenigsten eine Testumgebung für eine Fernsteuerung (ist das einzige was ich bei dem Gerät vermisse)aufbauen kann. Dabei bin ich auf diesen Thread gestossen und die Doku die hier bereits existiert (Credits an alle Beteiligten). Ich habe mir dann beim Händler eine neue HaupPlatine und MMI-Platine geholt jeweils mit aktuellsten SW-Stand (5.01 MSW,5.05 MMI). Die alten beiden Platinen habe ich im Zuge dessen ebenfalls auf diesen Stand bringen lassen. Meine alten Platine (BJ 2013) gibt mir zwar eine Antwort auf ein Kommando zurück, aber sowohl Inhalt als auch Länge entsprechen nicht dem was in der Doku beschrieben ist. Meine neue Platine (diese Woche geliefert bekommen) gibt mir auf keine Kommando eine Antwort zurück (Mäher läuft aber problemlos). Ich kann die Antoworten die ich bekommen gerne näher ausführen, falls es hilft. Im Moment würde mich nur interessieren mit welchen Versionsständen diese Lösung beich euch funktioniert, bzw, wie alt diese Hardware ist. Wäre dankbar für jede Rückmeldung. Sigi
Abend! Der meine ist ein Husky 310 aus Baujahr 2014. SW-Version schon ein wenig was älter... Ob der Gardena R70 hier baugleich ist - weiß nicht. Der R40Li scheint das gleiche Protokoll zu haben. Inwiefern sind die Längen denn unterschiedlich? Hast Du mein Java-Tool mal probiert?
Angehängte Dateien:
-

R70Li_Err1.PNG
51 KB
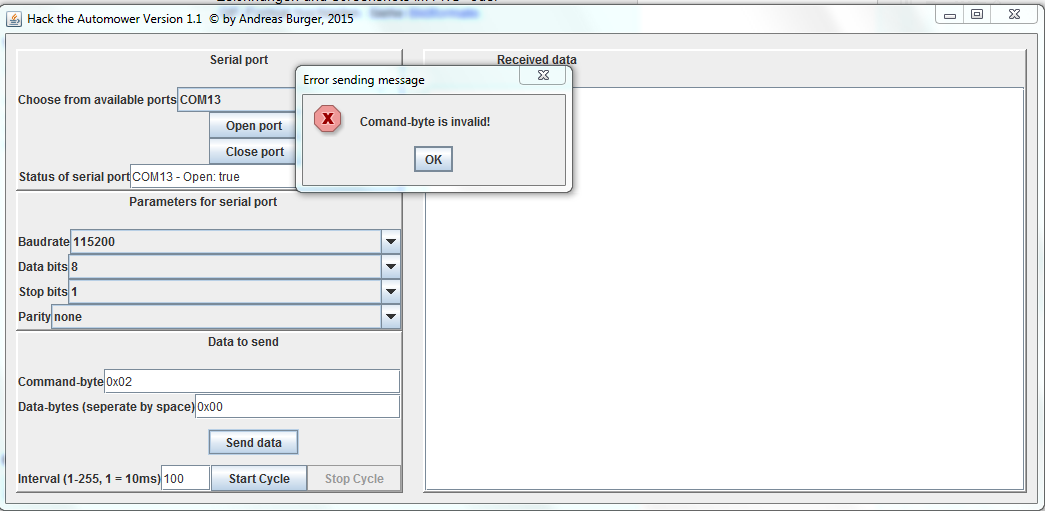
Hi Andreas ! Also ich habe anstatt hterm mal dein Tool probiert: Für das Kommando "Uhrzeit abfragen" gebe ich im Feld Commandbyte den Wert 0x02 ein und im Feld Datenbytes 0x00. Wenn ich das sende bekomme ich ein rotes Popup "Command-byte is invalid". Habe ich die Anwendung des Tools richtig verstanden ? Das gesamte Telegramm wäre ja 02 02 01 00 8B 03. Ich gehe davon aus dass du den Rest automatisch ergänzt oder ? Sigi
Angehängte Dateien:
-

R70_Err2.PNG
52 KB
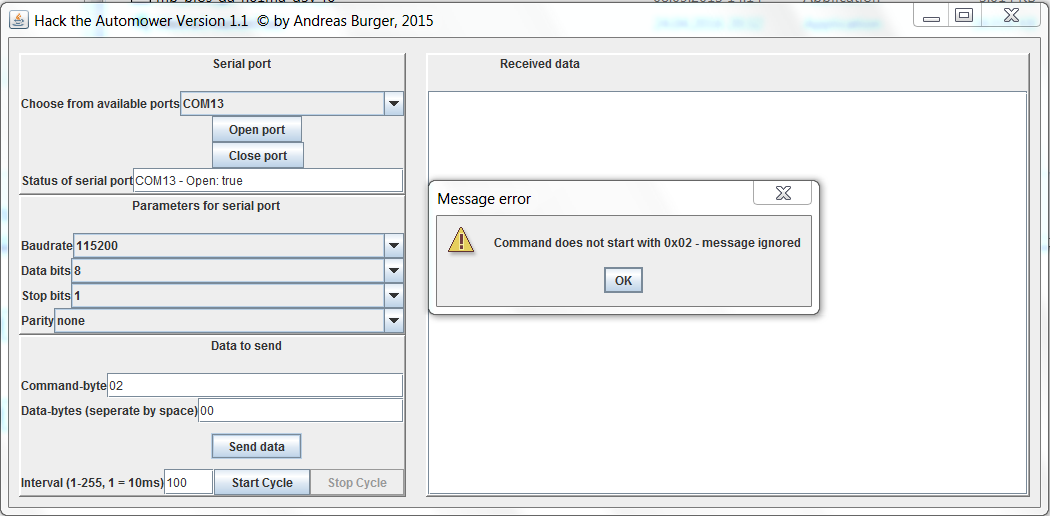
Hallo Adnreas ! Das aber genau fordert das Tool, denn ich bekomme dann diese Fehlermeldung wenn ich 0x weglasse : "Command does not start with 0x002"
Zefix... Mein Rechner ist neulich abgeraucht. Muss erstmal nachdenken...
Merde, heisst der Sourcecode zu deinem Tool ist verloren ?
Naja, nicht ganz. Ist in der Jar enthalten, aber leider ohne Kommentare...
OK - 0x2 ist eigentlich richtig. Welche Java-Version nutzt Du? Probier bitte 1.6, maximal 1.7
Hallo Andreas ! Erstmal danke das du dir hier Mühe machst mir weiter zu helfen. Ich habe derzeit JRE 1.7 installiert, wenn das ok ist ? Allgemein zu dem Tool wie sind die beiden Eingabefelder zu sehen. Das ganze Telegramm besteht ja aus den beiden Frame-Bytes 0x02 am Beginn und 0x03 am Ende. Fügst du diese automatisch ein ? Dann würde es ja keine Sinn machen wenn ich sie im Kommandobyte mit dazuschreibe ? Im Kommandobyte steht immer nur genau ein Byte ? Prüfst du ob das Telegramm für ein bestimmtes Kommando vollständig syntaktisch richtig ist (Länge und Datenbytes) ? Sigi
Ich habe derzeit JRE 1.7 installiert, wenn das ok ist ? Ja Das ganze Telegramm besteht ja aus den beiden Frame-Bytes 0x02 am Beginn und 0x03 am Ende. Fügst du diese automatisch ein ? Ja Dann würde es ja keine Sinn machen wenn ich sie im Kommandobyte mit dazuschreibe ? Ja Im Kommandobyte steht immer nur genau ein Byte ? Ja Prüfst du ob das Telegramm für ein bestimmtes Kommando vollständig syntaktisch richtig ist (Länge und Datenbytes) ? Nein, kann ich leider nicht P.S.: wenn elektrisch alles richtig ist - dann klappt der Empfang jedenfalls. Läuft da was rein?
Angehängte Dateien:
-

R70_Err3.PNG
74 KB
Hallo Andreas ! Also die Meldung "Command does not start with 0x02" scheint erst zu kommen nachdem vom Mäher eine Antwort eintrifft, es schaut also so aus alsob dein Tool mit der Meldung das Antworttelegramm meint nicht das Request-Telegramm. Zumindest wenn ich den Mäher abhänge dann kommt die Meldung nicht weil er in ein Timeout läuft. Sehe ich das richtig ? Würde meine Beobachtung bestätigen die ich mit hterm gemacht habe, dass die Antworttelegramme eine andere Struktur haben: Ich schicke: 02 02 03 01 00 8b 03 (Uhrzeit abfragen) ich empfange: FB FB FB FD FF EB FB Ich werde das Gefühl nicht los das hier die neue SW Version von Gardena was geändert hat, aber kann mich natürlich auch täuschen (leider habe ich mit der alten 3.01 nicht getestet, drumm fehlt mir der Gegenbeweis). Sigi
Ja, ist leider ganz anders. Damit kann mein Tool nicht. Sorry!!!
Schade, wäre genau das gewesen was ich gesucht habe, trotzdem danke vorerst für Deine Mühe; Meine Thesen will ich allerdings für alle späteren Leser noch loswerden: 1. Die hier beschriebenen Telegramme funktionieren spätestens mit MSW 5.01 nicht mehr ! 2. Mit einer neuen Platine funktioniert der AUX1-Anschluss überhaupt nicht mehr ! Wer einen Gegenbeweis für meine Thesen hat, bitte gerne ;) Ich werde mal schauen was hier noch herauszufinden ist, und werde es ggf. hier kundtun. Sigi
Hi Sigi, ich würde hier eher von einem elektrisch/logischem Problem ausgehen. Da sind einfach zu viele Einsen in der Antwort. Wenn du hast, dann könntest du mal einen Logic Analyzer oder Oszi mitlaufen lassen. Gruß Christian
Bingo ! Man glaubt es kaum: Da habe ich doch bei einem renommierten Distributor, neben diversen Kleinteilen, ein sündteures USB-TTL Kabel (mit original FTDI Chip) gekauft und dieses (auf Christian seinen Tip) gegen ein anderes getauscht (musste zuerst eineWandler von RS232/TTL ranlöten) und siehe da es funktioniert ! Somit kann ich schon mal These 1 widerrufen, These 2 muss ich nochmals nachprüfen. Danke Christian für den Tip.
Also, nehme alles zurück , auch die neue Platine antwortet nun mit den Telegrammen, wie sie in der Doku beschrieben wurde. Sorry das ich hier alles angezweifelt habe, aber auf die Idee das das USB-Konverter Kabel defekt ist wäre ich zuletzt gekommen. Ich hoffe dass ich trotzdem noch meinen Beitrage leisten kann. Mein Vorhaben ist es den Mäher nur mit einem 433Mhz/Serial- Modul auszustatten und dann im Haus z.B. einen RasberryPi mit demselben Modul und WebServer als Gateway für den Zugriff aus dem LAN auf den Mäher auszustatten. Mal schauen wie es sich bewährt, ich werde meine Ergebnisse auf alle Fälle hier veröffentlichen. Sigi
Hallo Sigi, nachdem nun nachgewiesen ist, dass es funktioniert... Wenn Du Dich dem Selbstbau hingeben möchtest, habe ich vollstes Verständnis. Ich selbst habe das NICHT fertig gestellt, sondern das Modul robonect (robonect.de) erworben. Funktioniert hervorragend und war nicht überteuert... Grüße, Andi
Hallo Andi ! Das Projekt habe/hatte ich auch im Auge und wäre mein Plan B. Was WLAN betrifft habe ich so meine Bedenken was die Robustheit betrifft da das ganze ja ohne mein Dazutun 24x7 laufen muss, Stromverbrauch wird auch höher sein. Aber das sind alles unbelegbare Annahmen aus meiner Erfahrung, gut möglich das diese Lösung eine absoluter "No Brainer" ist. Am Ende wird es eine Frage der zur Verfügung stehenden Zeit sein, und falls mich das ganze allzu sehr beschäftigt werde ich auch den bequemen Weg gehen, die robonect Module sind ja preislich ganz ok was ich gesehen habe. Sigi
Angehängte Dateien:
-

IMG_20160525_214241.jpg
240 KB -

IMG_20160525_214256.jpg
240 KB -

IMG_20160525_214319.jpg
230 KB -

IMG_20160525_214438.jpg
230 KB -

IMG_20160525_214453.jpg
230 KB
Hallo wiedermal ! Also ich wollte ja hier den Stand meiner Arbeit von zeit zu Zeit preisgeben: 1. Ich habe mich für einen 433MHz Transceiver mit UART entschieden und diesen mit einer kleinen Adapterplatine (mit 1.27 und 2.54er LochRaster) direkt am AUX1 auf die MCB des Gardena R70Li aufgesteckt. 2. Ich verwende dafür einen HM Trp 433s. mehr dazu hier: http://www.hoperf.com/data_link/HM-TRP.html 3. Nachteile: Das Modul kommt mit 2mm Pinabstand daher und passt somit nicht sauber auf die Lochrasterplatine. Weiters hat es einen Versorgungsspannungsbereich von 2.5-3.6V darum brauch ich einen Spannungsregler da ich das Modul immer betriebbereit haben möchte. Weiters habe ich gleich mal aus Versehen ein Modul mit 5V betrieben und verheizt. 4. Vorteil: Das Modul ist denkbar einfach zu konfigurieren und hat mit 100mW eine passable Ausgangsleistung (ok mit meinem Antennendesign mache ich das wieder zunichte). 5. Auf der Gegenseite habe ich einen Raspberry PI3 mit demselben Modul via USB Serial Wandler. Die gesamte Applikationslogik soll als Web-Applikation auf dem Raspberry PI laufen, dort bin ich derzeit drann. Wenn es was zu sehen gibt, folgt wieder ein Update. Sigi
Hallo Sigi, ist es Dir auch schon gelungen, den Mäher aufzuwecken, nachdem er in den StandBy-Schlaf gefallen ist? Wie funktioniert das? Hat der Aux-Anschluss dafür einen Pin?
Hallo Karsten ! So ein Zufall, ich hänge derzeit genau an diesem Problem ;) Vielleicht können uns die Kollegen die hier schon einiges an Vorarbeit geleistet haben den entscheidenden Tipp geben: Die Kommunikation über Aux1 funktioniert soweit wie hier beschrieben (ein paar zusätzliche Sachen konnte ich noch herausfinden) aber: Sobald der Mäher außerhalb der programmierten Betriebszeiten ist, und weder im Zustand Mähen oder Laden, reagiert er mir nur noch auf ein einziges Telegramm und zwar das Telegramm für die Statusabfrage (0x12/0x01). Bei allen anderen Telegrammen, die sonst problemlos beantwortet werden, kommt in diesem Zustand keine Antwort. Beispielsweise auch das Telegramm für die Zeitabfrage gibt keine Antwort :( Ansonsten funktioniert das ganz passabel, ich habe ein Web-UI dafür gemacht und kann bereits die Timer anzeigen und einstellen. Aktueller Status anzeigen und Betriebsart wechseln sowie Start/Stop. Wenn allerdings diese Funktionen nur innerhalb der Betriebszeit gehe wäre das eich echter Showstopper ;( @All Also falls jemand von euch diese Schnittstelle selber in Betrieb hat oder das Problem kennt wäre ich (in dem Fall auch Karsten) dankbar für einen Hinweis. Sigi
Also, ich muss mir derweil selbst antworten: Nach meinem derzeitigen Erkenntnisstand gibt es keine Möglichkeit den Mäher rein über den Aux1-Port mittels Telegramm aus dem Standby zu holen. Solange er noch am Laden ist (auch außerhalb der Betriebszeit) antwortet er noch auf alle Telegramme, aber danach ist Feierabend (außer Statusabfrage). Die Stop-Taste scheint hier der einzige Weg zu sein ihn in diesem Zustand aufzuwecken. Damit ist dann aber der Start via Aux1, wie oben beschrieben, nicht mehr möglich, dann müßte ein Start-Telegramm über den MMI-Port kommen. Ich habe noch versucht ob evt. die restlich PIN's an Aux1 eine derartige Funktion haben. Unbekannt dabei ist wofür PIN 4 und 6 dienen (PIN 8 ist Gnd). Bei beiden habe ich mal platt versucht Gnd und 3.3V anzulegen - hat aber nichts bewirkt. Ladestation kurz ein/auschalten verändert ebenfalls nichts. Das einzige was ich mir noch denken könnte ist, dass es evt.eine magisches Telegramm gibt das man finden müßte. Vielleicht könnte man auch mal bei Husquarna anfragen ob sie eine Doku für die Schnittstelle rausrücken ;)) Sigi
Hallo :) Leider habe ich keinen 2016er Mäher mehr hier. Hat vielleicht jemand seinen gerade offen und kann mir sagen, ob auf dem 10 poligen Stecker (MMI / MAIN) die Batteriespannung (ca.19V) auf Pin 8,9 oder 10 liegt? GND ist auf Pin 3. Gemessen werden müsste also die Spannung zwischen 3 und 8, 3 und 9, sowie 3 und 10. Wenn jemand mist, bitte vorsichtig sein und nicht mit der Messspitze abrutschen! Vielen Dank!
Hallo Sigi, was meintest Du mit "ein paar zusätzliche Sachen konnte ich noch herausfinden". Ich arbeite nach dem Dokument "Robomower_V0.8.pdf". Die seriellen Kommandos werden über einen ESP8266 per WLAN auf mein Synology NAS übertragen, allerdings nur solange die Spannung anliegt. Hast Du neue Abfrage-Befehle gefunden? Falls sich jemand für die Auswertung interessiert, siehe Anhang. Gruß, Markus
Hallo Markus ! In dem Fall gibt es doch noch jemanden der sich an der Aux1-Schnittstelle versucht ;) Was ich zusätzlich noch herausgefunden habe sind zusätzliche Telegramme bzw. ein paar kleinere Fehler in der Doku. Am Ende habe ich mich dann schweren Herzens für das Robonect Modul entschieden, das macht zwar viel mehr als ich eigentlich wollte und ist leider WLAN basierend aber die Fernstuerung funktioniert grundsätzlich. Das Robonect Modul hat IMHO den umfassendesten Funktionsumfang des Protokolls implementiert. Leider ist es nicht so stabil im Betrieb, deshalb hätte ich lieber den Weg über den Aux1 genommen. Aber falls du das Kernproblem lösen kannst, nämlich wie man den Mäher aus dem Standby-Zustand aufweckt rein nur durch ein Telegramm über Aux1 bist du mein Held ;) Sigi
Kannst Du mir bitte Deine Erkenntnisse (zusätzliche Telegramme, Fehler in der Doku) zugänglich machen?
Kannst Du mir bitte Deine Erkenntnisse (zusätzliche Telegramme, Fehler in der Doku) zugänglich machen?
Hi ! Sorry, habe das Projekt im Sommer zur Seite gelegt da ich eben an selbigem Punkt nicht weitergekommen bin. Jetzt wird's kompliziert da ich zuerst eine virtuelle Maschine mit Windows 10 wiederbeleben muss, und dann muss ich den Code (war in C# geschrieben)mit der Doku abgleichen um die Telegramme zu finden die ich eben in Eigenregie noch herausgefunden habe. Alles viel Arbeit für ein Projekt das man selber eingestampft hat, aber ich schau ob ich über Weihnachten Zeit finde. Sorry nochmals, aber das eigentliche Problem ist leider auch mit meinen Zusatzinfos nicht gelöst, wie man eben den Mäher alleine mittels Telegramm wieder aus den Standby kriegt. Sigi
Hi I know this is an old thread. I have a 315 and try to communicate with it through the AUX port. Using the Mowerdecoder program i can open the connection and send: Command:02 Data:02 01 00 8b 03 I exted to get the date back, but every time i get this: RAW: 0203090009082F00000000008403 DIR: response CMD: 03 LEN: 09 DATA: 00 09 08 2F 00 00 00 00 00 Any clue? did someone tried to communicate with a 315?
Hallo Mich würde mal interessieren wie ich die CRC berechne kann mir das mal einer erklären ?? Mit Freundlichen Grüßen
Z.b. in C# so, die Bytes aus den der CRC berechnet wird sind nur die
Payload. Also ohne die beiden Frame-Bytes 0x03 und 0x02.
var crc = Crc8.getInstance().compute(payload);
public class Crc8
{
private static Crc8 instance;
private byte initial = 0x00;
private byte finalXor = 0x00;
private bool inputReflected = true;
private bool resultReflected = true;
private byte[] crcTable = new byte[] { 0, 49, 98, 83, 196, 245,
166, 151, 185, 136, 219, 234, 125, 76, 31, 46, 67, 114, 33, 16, 135,
182, 229, 212, 250, 203, 152, 169, 62, 15, 92, 109, 134, 183, 228, 213,
66, 115, 32, 17, 63, 14, 93, 108, 251, 202, 153, 168, 197, 244, 167,
150, 1, 48, 99, 82, 124, 77, 30, 47, 184, 137, 218, 235, 61, 12, 95,
110, 249, 200, 155, 170, 132, 181, 230, 215, 64, 113, 34, 19, 126, 79,
28, 45, 186, 139, 216, 233, 199, 246, 165, 148, 3, 50, 97, 80, 187, 138,
217, 232, 127, 78, 29, 44, 2, 51, 96, 81, 198, 247, 164, 149, 248, 201,
154, 171, 60, 13, 94, 111, 65, 112, 35, 18, 133, 180, 231, 214, 122, 75,
24, 41, 190, 143, 220, 237, 195, 242, 161, 144, 7, 54, 101, 84, 57, 8,
91, 106, 253, 204, 159, 174, 128, 177, 226, 211, 68, 117, 38, 23, 252,
205, 158, 175, 56, 9, 90, 107, 69, 116, 39, 22, 129, 176, 227, 210, 191,
142, 221, 236, 123, 74, 25, 40, 6, 55, 100, 85, 194, 243, 160, 145, 71,
118, 37, 20, 131, 178, 225, 208, 254, 207, 156, 173, 58, 11, 88, 105, 4,
53, 102, 87, 192, 241, 162, 147, 189, 140, 223, 238, 121, 72, 27, 42,
193, 240, 163, 146, 5, 52, 103, 86, 120, 73, 26, 43, 188, 141, 222, 239,
130, 179, 224, 209, 70, 119, 36, 21, 59, 10, 89, 104, 255, 206, 157, 172
};
private Crc8() { }
public static Crc8 getInstance()
{
return instance == null ? instance = new Crc8() : instance;
}
public byte compute(byte[] bytes)
{
byte crc = initial;
foreach (var b in bytes)
{
byte curByte = (inputReflected ? reflect8(b) : b);
byte data = (byte)(curByte ^ crc);
crc = crcTable[data];
}
crc = (resultReflected ? reflect8(crc) : crc);
return (byte)(crc ^ finalXor);
}
private byte reflect8(byte val)
{
byte resByte = 0;
for (byte i = 0; i < 8; i++)
{
if ((val & (1 << i)) != 0)
{
resByte |= (byte) (1 << (7 - i));
}
}
return resByte;
}
}
Hey dankeschön !!! Ist selten das mal jemand einfach code Postet. Also ist der Payload nur das längenbyte und die Datenbytes ? Und wie bekomme ich das in arduino zum laufen ? Sorry ich verstehe C# noch nicht so gut , bin aber lernfähig. Mit Freundlichen Grüßen
Ja genau der CrC wird über Nutzdaten und Länge gebildet. Wenn du diesen Thread aufmerksam vom Anfang weg durchliest bekommst alle Infos dazu, ich habs auch so gemacht. Mit Arduino Code kenn ich mich leider nicht aus. Du musst die Syntax halt übertragen und F. Funktion der .Net Lib einen Ersatz finden. Oder du googelst nach CRC8 Arduino , denke mal das das Problem schon oft gelöst wurde. Sigi
Hmm, Habe die FastCRC lib gefunden und getestet ... https://github.com/FrankBoesing/FastCRC kommt aber nichts gescheites raus... mit freundlichen grüßen
Marcel Klug schrieb: > Hmm, > Habe die FastCRC lib gefunden und getestet ... > https://github.com/FrankBoesing/FastCRC > > kommt aber nichts gescheites raus... > > mit freundlichen grüßen Was meinst Du mit kommt nichts gescheites bei raus? Dass der CRC nicht mit dem übereinstimmt, was Du brauchst? Wichtig zu wissen: es gibt verschiedene Parametrisierung und verschiedenenes Vorgehen für CRCs. So sind zB die Tables der zwei 8 Bit Varianten in der von Dir genannten Lib anders als die von Sigi gepostete.
Das habe ich gesehen und habe die Table auch angeglichen. Trozdem stimmt der CRC nicht ... Ich bin da zu blöd für mfg
Also ich denke ich habe ein stück von dem code schon verstanden.
foreach (var b in bytes):
1. erstes byte von payload wird reflektiert.
2. dann wird dises byte mit XOR vom initalen crc verknüpft.
3. der crc ist dann die position in der tabelle also von diesem byte.
4. im prinzip wieder von vorne außer das dann die XOR verküpfung die
ebend errechnete crc ist.
am ende wird das ergebnis wieder reflektiert und mit dem finalXOR
verknüpft.
Habe ich das jetzt soweit alles richtig verstanden ?
Was ich aber nicht verstehe, was macht
private Crc8() { }
public static Crc8 getInstance()
{
return instance == null ? instance = new Crc8() : instance;
}
das ist nut ein singleton , es erzeugt eine Instanz der Klasse Crc8. kann man auch einfach ohne instanz lösen indem du eine statische Methode machst und auch die ganzen Members statisch deklariert.
Also ich habe das jetzt mal versucht um zu setzten. Habe mein Programm mal angehängt. Leider kommt nicht der richtige CRC ... Zum beispiel bei Uhrzeit stellen. 0x02 , 0x02 , 0x04 , 0x80 , 0x0C , 0x28 , 0x00 sollte ja der CRC 0xA4 sein bei meinem Programm kommt da 0xE6 raus ... Wo liegt mein fehler ich werd noch bekloppt das kann doch so schwierig nicht sein ... Mit Freundlichen Grüßen
halleluja!!!
Checksumme nach dallas-1-wire Standard
war der Hinweis ...
// The 1-Wire CRC scheme is described in Maxim Application Note 27:
// "Understanding and Using Cyclic Redundancy Checks with Maxim iButton
Products"
uint8_t crc8_( uint8_t *addr, uint8_t len)
{
uint8_t crc=0;
for (uint8_t i=0; i<len;i++)
{
uint8_t inbyte = addr[i];
for (uint8_t j=0;j<8;j++)
{
uint8_t mix = (crc ^ inbyte) & 0x01;
crc >>= 1;
if (mix)
crc ^= 0x8C;
inbyte >>= 1;
}
}
return crc;
}
so läuft das jetzt.
Hallo in die Runde, Ich habe mir einen r40li angeschafft und benötige nur die Befehle START STOP und setzen der ZEIT via UDP. Ich bin leider nicht fündig geworden wie ich den Adapter hierzu bauen kann der dann mit dem AUX Port kommuniziert. Hat das wer bereits Dokumentiert und ich bin zu blöd um es zu finden? Auf eine Antwort würde ich mich freuen. Als Gegenleistung würde ich ein kleines How To erstellen. P.S. Ich weiss es gibt diese WLAN module um die 200,-€ zu kaufen die sind für mein Vorhaben overloaded und ehrlich gesagt zu teuer.
Hi, Ich habe seinerzeit eine PDF verfasst Robomow 0.8. ich bin auch daran interessiert so was zu entwickeln. Ich habe das Modul damals auch gekauft. Bin aber nicht zufrieden damit, es macht diverse Probleme. Bist du in der Lage sowas zu programmieren? Ich könnte die Hardware herstellen. Das Problem ist das man den Umweg über die Klappe gehen muss damit der Mäher die START STOP Anweisungen auch ausführt. Ich könnte ein Modul auf Basis des ESP32 bauen was die Kommunikation wlan - Uart übernimmt. Und einen schaltausgang für die Klappe besitzt. Natürlich alles Plug and Play. Muss nur jemanden finden der sowas programmieren kann. Gruß Follow2000
Hi ! Wie du im Thread siehst habe ich mich auch schon an dem Thema versucht und bin ziemlich weit gekommen dann aber aufgegeben: 1. Wie du richtig erkannt hast, reicht der UART alleine nicht um den Mäher aus dem Standby zu bringen, dazu braucht man z.b. den Schalter der Klappe. 2. Ich bin bewusst den Weg ohne Mikrocontroller auf dem Mäher selber gegangen und stattdessen einen Transceiver HM433 eingesetzt der der den UART via 433Mhz Funk auf einen stationären Rechner bringt. Hat den Vorteil das du locker rund ums Haus kommst, das ist mit WLAN ein Problem, ja und viel wichtiger - du musst nie auf dem Mäher Updates machen. Wenn man aber den Schalter der Klappe mit abfragen will funktioniert die Transceiverlösung alleine leider nicht mehr (drumm habe ich aufgegeben da das für mich die einzige wahre Lösung war). 3. Das WLAN Modul dass du meinst wird wohl das hier sein: https://www.robonect-shop.de/shop/robonect-hx/ Hat damals nur 80EUR gekostet, musste ich aber nach 1 Jahr wieder ausbauen da es ausgefallen ist. Allgemein hatte es das Problem dass der WLAN Empfang durchwegs schlecht war und immer wieder mit Stabilitätsproblemen zu kämpfen hatte da es sich zwischen das Bedienteil und die Hauptplatine hängt. Zusätzlich hat es auch die ganze Logik aufm Mäher selber.
Follow2000 schrieb: > Bist > du in der Lage sowas zu programmieren? Ich könnte die Hardware > herstellen. Das Problem ist das man den Umweg über die Klappe gehen muss > damit der Mäher die START STOP Anweisungen auch ausführt. Ich könnte ein > Modul auf Basis des ESP32 bauen was die Kommunikation wlan - Uart > übernimmt. Und einen schaltausgang für die Klappe besitzt. Natürlich > alles Plug and Play. Ich bin kein programmierer. Eher der Tüftler...solange Testen bis es geht.... Es gab einen "Christoph" der in dem anderen Thread von dir "Gardena r40li oder Husqvarna G3 fernsteuern" sich dazu angeboten hatte :) Hat denn dein ESP2866 esp07 Modul aus dem anderen Beitrag funktioniert? Das wäre ja schon quasi eine Fertige Lösung. Nur die Use Cases müssten dann definiert werden. Welches Flachbandkabel hast du für den AUX Port verwendet? Sigi_B schrieb: > 2. Ich bin bewusst den Weg ohne Mikrocontroller auf dem Mäher selber > gegangen und stattdessen einen Transceiver HM433 eingesetzt der der den > UART via 433Mhz Funk auf einen stationären Rechner bringt. > Hat den Vorteil das du locker rund ums Haus kommst, das ist mit WLAN ein > Problem, ja und viel wichtiger - du musst nie auf dem Mäher Updates > machen. Meine Fläche ist recht klein daher würde WLAN funktionieren, ggf. ein Repeater rein. Ich habe eine kleine Garage gebaut und dort ist ein Rolladen davor. d.h. ich will erst den Rollo hochfahren wenn es nicht regnet und dann den Mäher starten. Wenn ich feste Zeiten habe ist das ja kein Problem nur das "HOME"-Coming ist nicht abgedekt wenn es anfängt zu regnen. Ich hab den Mäher noch nciht aufgeschraubt aber den Stoptaster über ein Relais zu schalten sollte machbar sein. Start taster gibt es so glaube nicht nur wenn man auf manuell umstellt.
Ok, wenn du nur eine Lösung für dich brauchst kannst natürlich WLAN machen. Denke aber du findest mehr Unterstützung wenn du der gesamten Menschheit einen Dienst erweisen willst ;)
Sigi_B schrieb: > Ok, wenn du nur eine Lösung für dich brauchst kannst natürlich WLAN > machen. > Denke aber du findest mehr Unterstützung wenn du der gesamten Menschheit > einen Dienst erweisen willst ;) Ich würde das gemachte natürlich zur Verfügung stellen und ein ausführliches Tut schreiben mit Bildern etc. Ich denke wie so viele ist es in diesem Thread sehr schwer geworden die Lösungswege herauszulesen. Ich würde es dann in eine Anleitung packen: 1.) Hardware 2.) Software etc...
@Follow2000: Gibt es eine noch aktuellere Version deines PDFs? (Version 0.8 ist ja hier drin) Zu meinem tuen: Ich habe einen Wemos D1 und das DC Shield hierzu verwendet. Hast ein fertiges Programm für die WLAN Konfig des ESPs Oder eine Standard genommen? Mit dem DC Shield kann man dann direkt an die 18V aus deiner Beschreibung. Da der Wemos einen USB Anschluss hat kann man ein 50cm USB Kabel oder Buchse nehmen und sich somit einen aussen Anschluss erstellen damit man den nicht immer aufschrauben muss. Das Regen Problem kann man ja mit evtl Timer setzen oder Home setzen dann starten lösen, solange die Klappe unten ist. Ich müsste es dann mal probieren. Oder gibt es einen "PARKEN" Befehl?
Marcel Klug schrieb: > > // The 1-Wire CRC scheme is described in Maxim Application Note 27: > // "Understanding and Using Cyclic Redundancy Checks with Maxim iButton > Products" > > uint8_t crc8_( uint8_t *addr, uint8_t len) >................ { > so läuft das jetzt. @Marcel: Gibt es ein Final CRC.ino?
Ich habe die Realisierung in meinem Fall abgeschlossen und wollte es hier zur Verfügung stellen. Die Anbindung erfolgt über die Loxone Software: Link: https://www.loxwiki.eu/pages/viewpage.action?pageId=48137811 Have fun....
Ich habe diesen Thread lange nicht mehr beobachtet. Mein letzter (und einziger) Eintrag ist vom 25.10.2016. Aber ich finde es toll, dass es hier weitergeht. Ich schreibe seit 4 oder 5 Jahren alle Staus-Informationen per WLAN (ESP-07) in eine Datenbank auf meine Synology Disk Station. Und lasse mir dann z. B. 'ne Mail schicken, wenn der Robi mal wieder nicht in die Station einfährt. Ich bin immer an neuen Status-Abfragen und deren Antworten interessiert. Aktuell frage ich alle 2min folgendes ab:
1 | Status..............02-13-15-00-04-0c-06-01-00-00-00-00-00-00-00-89-a2-ef-5c-90-03-30-00-00-0d-03 |
2 | Batterie-Status.....02-15-15-00-f6-4a-44-02-4f-03-8c-00-b0-04-00-00-00-00-00-00-0c-fe-00-00-67-03 |
3 | Radmotor-Status.....02-15-0f-00-00-00-ff-ff-08-00-00-00-01-00-0c-00-00-00-4c-03 |
4 | Maehmotor-Status....02-15-07-00-00-00-19-00-80-01-b6-03 |
5 | Sensor-Status.......02-15-0c-00-00-00-e2-ff-0a-00-d9-03-00-aa-00-b4-03 |
Weiß z. B. jemand, wie man die im Robi eingestellte Uhrzeit abfragen kann?
Sorry, ziehe die Frage zurück. Die Uhrzeit kann man so abfragen:
1 | Command => 02-02-01-00-8B-03 |
2 | Status => 02-03-04-00-0A-15-0A-41-03 |
3 | |
4 | Zeichen 00 = 0x02 = immer 0x02 => passt |
5 | Zeichen 01 = 0x03 = Kommandobyte |
6 | Zeichen 02 = 0x04 = Längenbyte = 4 Datenbytes => passt |
7 | Zeichen 03 = 0x00 = Datenbyte 01 |
8 | Zeichen 04 = 0x0A = Datenbyte 02 |
9 | Zeichen 05 = 0x15 = Datenbyte 03 |
10 | Zeichen 06 = 0x0A = Datenbyte 04 |
11 | Zeichen 07 = 0x41 = Checksumme = 0x41 => passt (41) |
12 | Zeichen 08 = 0x03 = immer 0x03 => passt |
13 | |
14 | Byte 04 = 0X0A = 10 => 10 |
15 | Byte 05 = 0X15 = 21 => 21 |
16 | Byte 06 = 0X0A = 10 => 10 |
17 | => Uhrzeit: 10:21:10Uhr |
@ Markus: Wie verwendest du deinen ESP? Nur als Gateway oder schreibt dieser die Daten selbst in die Datenbank? Ich möchte ähnliches machen.
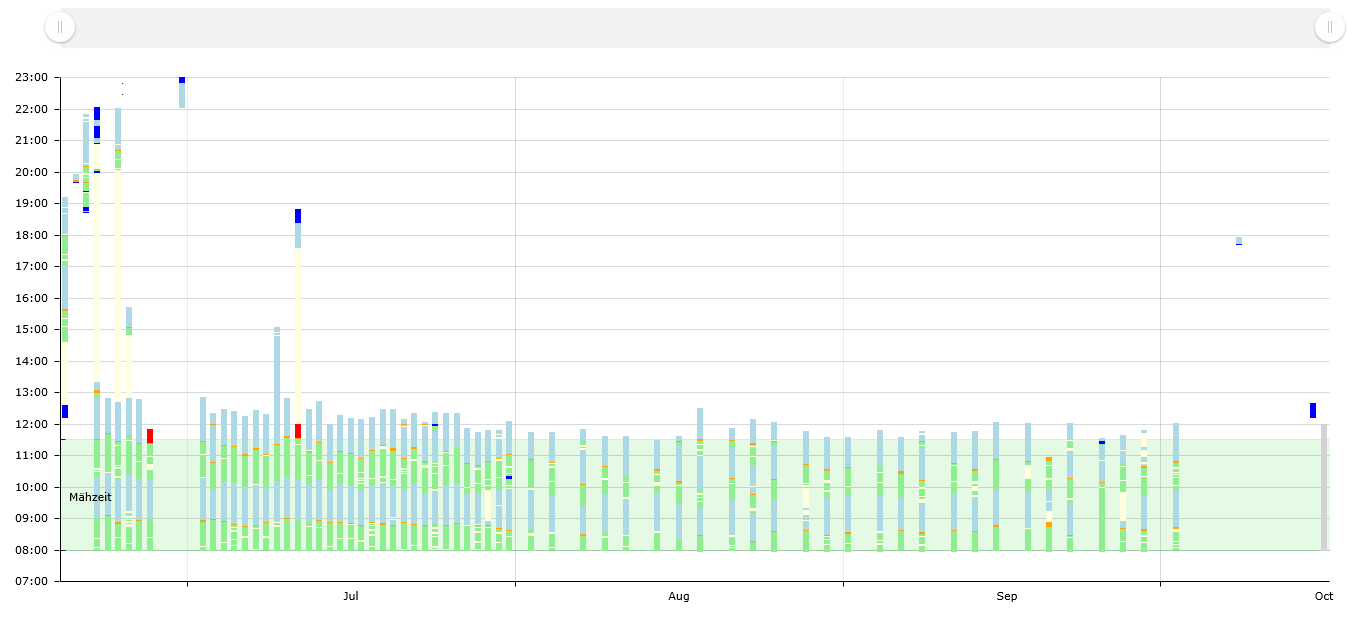
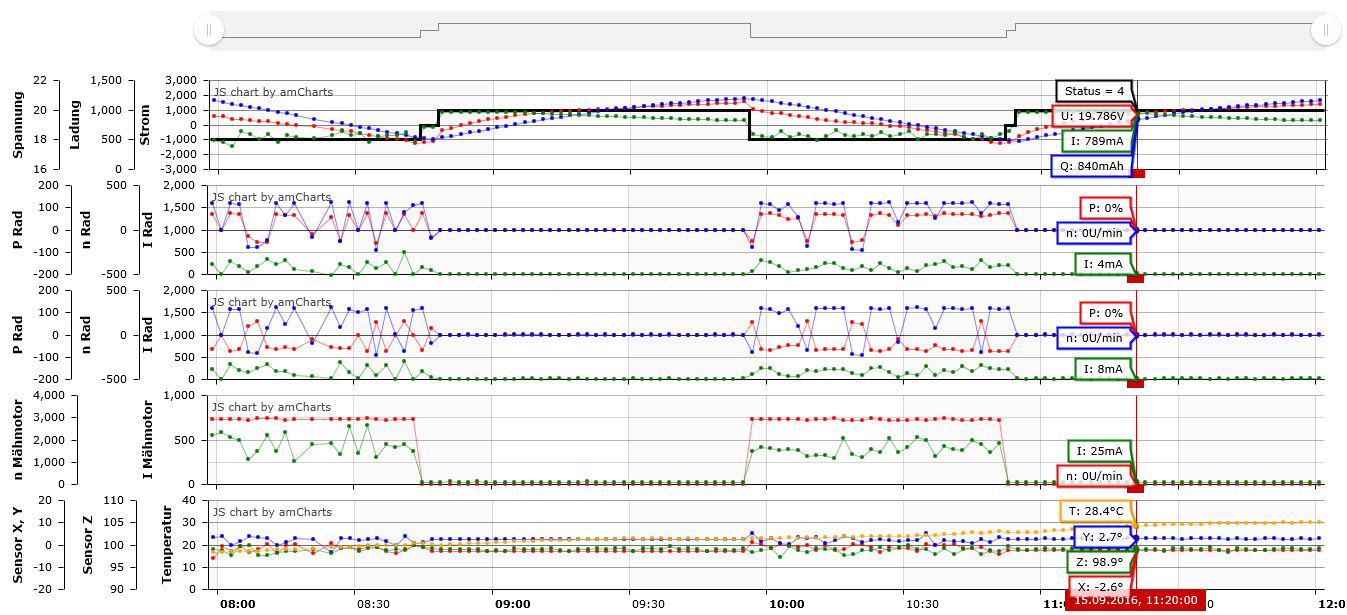
Auf dem ESP läuft ein einfaches Arduino-Programm "ESP8266_Robi_v2.ino" (siehe Anhang). So kann ich den ESP per Browser erreichen und die Kommando-Abfragen testen (Hex-String senden, Hex-String empfangen). Auf der Disk-Station läuft ein Python-Programm, das per Cronjob zyklisch aufgerufen wird (aktuell alle 2 Minuten). Dieses Python-Programm schreibt die Daten in die MySQL-Datenbank auf meiner Disk-Station. Zur grafischen Anzeige der Daten aus der MySQL-Datenbank nutze ich die Software amCharts (www.amcharts.com). Damit lassen sich im Browser (also z. B. auch auf einem Tablet) entsprechende Grafiken erstellen.
@ Markus: Danke für das file. Noch eine Frage wie erfolgt das Absetzen eines Kommandos (Hex-String) im Browser? OK habs gefunden: [IP]/send?cmd=02-02-01-00-8B-03
Soll ich Dir noch das Python-Programm schicken? Dann siehst Du, wie die Abfrage, die Antwort-Auswertung und das Schreiben in die Datenbank funktioniert.
Hier das Python-Programm. Melde Dich, wenn Du Fragen hast.
Schöne Sache. Du steuerst also den Mähroboter nicht an sondern verarbeitest nur die Statu informationen, wenn ich es richtig sehe. Coole Sache, wenn ich Zeit habe werde ich das mal auch testen.
Vor Jahren hat mein Robi bei starkem Regel eine Ecke des Rasens aufgewühlt. Daher kam die Idee, ihn bei Regen nicht fahren zu lassen. Das habe ich aber nie umgesetzt. Der aktuelle Projektstand ist für mich völlig ausreichend. Anhand der Aufzeichnungen konnte ich z. B. erkennen, dass der Akku schlapp macht (Laufzeit ging zurück, Akku-Spannung ging schnell in die Knie). Außerdem bekomme ich 'ne Mail, wenn ein Fehler vorliegt. So etwa einmal pro Monat gibt es z. B. Probleme beim Einfahren in die Ladestation. Ohne Mail-Benachrichtigung merke ich dass immer erst nach ein paar Tagen. Ich mach' es wie Google: Daten sammeln und dann gucken, was ich damit machen kann!
Zum manuellen Ansteuern habe ich mir noch eine HTML-/PHP-Webseite erstellt (siehe Anhang). Damit kann ich dann z. B die Uhrzeit einstellen.
Hallo zusammen, ich bin auf der Suche, meinen Mähroboter (Gardena R70li), fernzusteuern auf dieses Forum gestoßen. Finde ich super was Ihr bereits alles geleistet habt. Da mir aber die fertige Platine die es bereits zu kaufen gibt, preislich leider nicht zusagt, bin ich auf die Seite von RobR. gestoßen, der mit Hilfe von Loxone seinen Robi eingebunden hat. Da ich Programiertechnisch nicht so Fit bin gefällt mir die Lösung von Markus K. am besten. Jetzt meine Frage, kann ich mit der Lösung von Markus K. ebenfalls an die Serielle Schnittstelle des Robi? Ich würde gerne den Robi in FHEM integrieren und denke, dass ich es so leichter schaffe, dort irgendwas zusammen zu kratzen was programmtechnisch läuft und alle paar Minuten den Status des Mähers aus FHEM heraus abfrägt. Über eine kurze Info würde ich mich sehr freuen. Oder vielleicht hat jemand dies bereits schon in FHEM am laufen und kann mir hierfür weitere Hilfe geben. Besten Dank im vorraus
Ich greife mit dem ESP8266 auf die serielle Schnittstelle zu. Und ermögliche so den Zugriff auf den Robi.
Hallo zusammen, ich versuche derzeit, nach den tollen Vorarbeiten hier im Beitrag, meinen Mähroboter (R40li Bj. 2017) per WLAN zu steuern. Ich habe es jetzt soweit, dass ich ein ESP8266 (Wemos D1 Mini Pro) mit der Software von Markus K. (ESP8266_Robi_v2.ino, vielen Dank an dieser Stelle an Markus) geflasht habe und das Modul auch über WLAN ansprechen kann. Ich habe testhalber mal RX und TX gebrückt und bekomme über z.B. http://192.168.x.y/send?cmd=02-12-01-01-9F-03 im Browser auch wie erwartet 02-12-01-01-9F-03 wieder ausgegeben. Danach würde ich sagen, dass das Modul soweit funktionieren müsste. Habe dann den Mäher aufgeschraubt und das Modul eingebaut. Bevor ich alles wieder zusammenbaue, wollte ich das Modul wohl testen und habe den Mäher einfach mal eingeschaltet. Das Modul taucht auch im WLAN wieder auf, aber bei der Eingabe eines Befehl komme ich keine Rückmeldung im Browser. Auf dem Display passiert auch nix, steht zunächst auf PIN Abfrage. Habe die beiden folgenden Befehle probiert PIN senden http://192.168.x.y/send?cmd=02-0C-0C-04-00-01-E1-10-E5-03 (Pin ist 4321) Statusabfrage http://192.168.x.y/send?cmd=02-12-01-01-9F-03 Der AUX sitzt bei mir etwas anders (mehr links aussen auf der Platine) als auf den Bildern hier im Beitrag zu sehen. Hat sich vielleicht mit dem Baujahr etwas geändert, meiner ist von 2017? Kann man das überhaupt so testen, oder muss der Mäher samt Ladestation und Schleife installiert sein? Frage, weil ich die Station noch nicht wieder angeklemmt habe. Hat vielleicht noch jemand eine Idee, was ich falsch mache?
Ich kann Dir hier leider nicht helfen. PIN senden habe ich nie getestet. Aber die Status-Abfrage müsste funktionieren. Ich teste das aber immer nur dann, wenn der Robi einsatzbereit im Garten steht.
Vielen Dank für deine Rückmeldung. Ich habe den Mäher dann doch mal zusammengebaut und einsatzbereit gemacht und siehe da, ich bekomme die erwarteten Rückmeldungen. Ich habe es dann auch hier in einem Beitrag von Sigi (07.06.2016) gelesen, dass der Mäher nur beim Mähen oder Laden auf die Befehle antwortet. Ich erweitere gerade deine Version (ESP8266_Robi_v2.ino) um ein onboard Webinterface. Werde die Tage mal meine Ergebnisse hier posten.
Wie schon kurz geschrieben, bin ich an einem Webinterface, wo ich einige Informationen vom Mäher anzeigen möchte. Dazu schicke ich in einem gewissen Interval die verschiedenen Commands (Status, Battery, Time, Date, Timer1, Timer2, Next start, ...) an den Mäher und bereite die Daten auf. Mit definierten Testanworten (hard-coded) im Debugmodus klappt das auch soweit. Wenn ich das Modul allerdings in den Mäher einbaue, kommen die Antworten auf die Commands leider relativ selten über (der Mäher ist dabei am mähen). Dadurch, dass die Auswertung auf dem ESP8266 passiert, kann das ja nicht am WLAN liegen. Batteriestatus scheint immer zu antworten. Die anderen eher sporadisch. Hat jemand Erfahrung, ob eine gewisse Zeit zwischen Commands liegen muss, dass der Mäher vielleicht für bestimmte Commands nur in einem bestimmten Zeitinterval erneut antwortet. Unten habe ich mal die Methoden zum lesen und schreiben auf der seriellen Schnittstelle angefügt. Aktuell ist es so, dass der Command versendet wird und anschließend etwa 1 Sekunde (1000 mal mit Delay 1) Daten gelesen werden. Kam keine gültige Antwort wird es bis zu 3mal erneut versucht. Der Parameter 'name' ist nur für den Debugmodus, damit wird eine Testantwort ermittelt.
1 | String ExecuteSerialCommand(String cmd, String name) |
2 | {
|
3 | const int trials = 3; |
4 | String response = ""; |
5 | for(int i = 0; i < trials; i++) |
6 | {
|
7 | WriteSerialCommand(cmd); |
8 | response = ReadSerialResponse(name); |
9 | if(IsValid(response)) |
10 | break; |
11 | else
|
12 | Log("Invalid response (" + cmd +" -> " +response+ ")"); |
13 | }
|
14 | return response; |
15 | }
|
16 | |
17 | |
18 | void WriteSerialCommand(String cmd) |
19 | {
|
20 | do
|
21 | {
|
22 | cmd.substring(0, 2).toCharArray(ChrDummy, 3); // erste zwei Zeichen in Char-Array wandeln... |
23 | IntDummy = hex2int(ChrDummy, 2); // Char-Array in Integer wandeln... |
24 | cmd = cmd.substring(3, cmd.length()); // String ab drittem Zeichen kopieren |
25 | Serial.write(IntDummy); |
26 | } while (cmd.length() > 1); |
27 | }
|
28 | |
29 | String ReadSerialResponse(String name) |
30 | {
|
31 | if(DebugOn) |
32 | return GetTestResponse(name); |
33 | |
34 | String response = ""; |
35 | String separator = ""; |
36 | for (int i = 0; i < 1000; i++) |
37 | {
|
38 | int c = Serial.read(); |
39 | if (c >= 0 && c <= 255) |
40 | {
|
41 | response = response + separator + int2hex(c, 2); |
42 | separator = "-"; |
43 | }
|
44 | delay(1); |
45 | }
|
46 | return response; |
47 | }
|
Ich hoffe man versteht überhaupt mein Problem. Weiß zufällig jemand rat?
Angehängte Dateien:
-

lp.jpg
200 KB -

laden.jpg
170 KB -

maehen.jpg
160 KB -

admin.jpg
190 KB
Hallo zusammen... Wer ist denn aktuell noch an dem Thema dran? Hab mit eurer und anderer Hilfe von verschiedenen Seiten mal angefangen mein eigenes Modul zu bauen. Deshalb an dieser Stelle ein Herzliches DANKE an alle mitwirkenden! Bisher ein eher simpler Stand mit Web-Oberfläche. MQTT folgt für meine OpenHAB Einbindung. LG TimoS
Hallo Nils, ganz übersehen... Ich schicke zb die Bytes für die Status-abfrage, lese danach direkt genau wie du, mache 300ms Pause und schicke dann die Batt-abfrage mit direktem lesen danach. Evtl auch mal längere Pause dazwischen probieren. Timer etc frage ich "noch" nicht ab. LG
Ich bin noch dran an dem Thema. Aber passiv. Mein System läuft und ich kann das machen, was ich mir vorgenommen hatte. Eigentlich hatte ich noch vor, den Mäher bei Regen anzuhalten, da er mir vor zwei Jahren eine Ecke meins Gartens „aufgewühlt“ hatte. Aber dieses Vorhaben habe ich noch nicht umgesetzt.
Angehängte Dateien:
-

ESP8266_modul.png
2,7 MB -

Wall-E_rootpage.png
140 KB -

Wall-E_webpage.png
68 KB
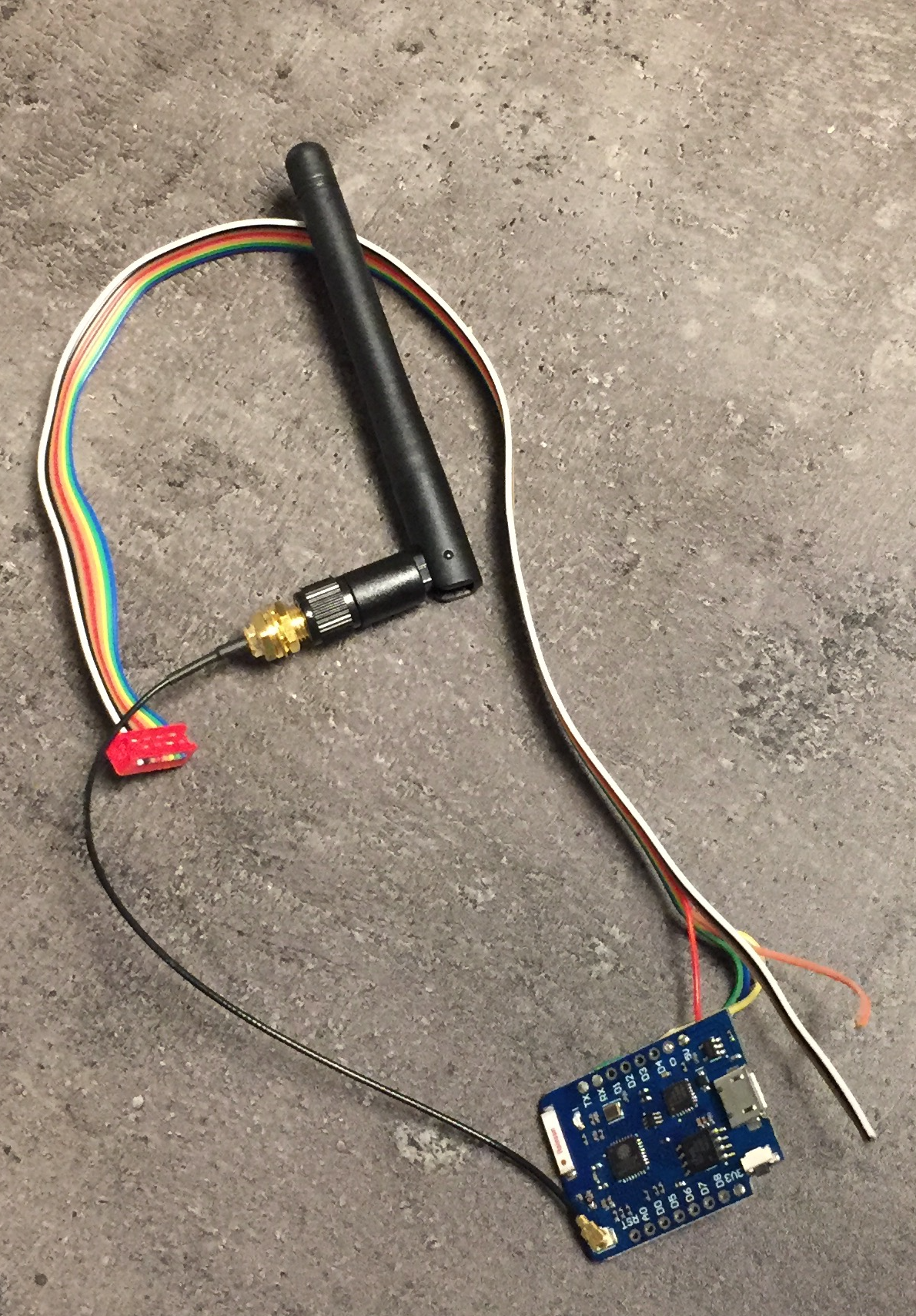
Hallo Timo, vielen Dank für deine Rückmeldung. Ist das eine eigene Platine? Ich habe ein Wemos D1 mini pro am Aux verwendet. Kannst du den Mäher auch Starten und Stoppen? Dein Oberfläche sieht jedenfalls ja schon gut aus. Habe meinen aktuellen Stand der Oberfläche auch mal angehängt. Nicht wundern, mein Mäher heißt Wall-E. Wollte das Ganze am Ende auch über eine Json-Ausgabe in mein FHEM System einbinden. Wollte die Timer und Intervalle jetzt noch über Web einstellbar machen, hoffe es liegt irgendwie am timing. Bissl ärgerlich, dass man den Mäher zum Life-Testen immer wieder komplett zusammenbauen muss.
Ja, ist eine eigene Platine, der zweite entwurf. Wenn er mäht, kann man ihn starten und stoppen. Start: 02-0E-01-01-6E-03 Stop: 02-0E-01-00-30-03 Warum lässt du dein Modul nicht einfach eingebaut? Schau dir mal das Beispiel "WebUpdater" an. Einfach neue Firmware über Weboberfläche hochladen ;) LG
Hallo in die Runde, ich habe die Anleitung für die Integration in Loxone geschrieben, die oben verlinkt ist. Habe auch das Szenario "Regen, fahr heim" eingebunden, aber festgestellt dass ich es nur einmal verwendet habe im letzten Jahr. Ich hätte Interesse an der erarbeiteten Weboberfläche von Timo S oder nlz. Falls Ihr das Sharen könnt würde ich mich freuen das mal zu testen. Grüße Rob
Hallo Timo, erstmal Hut ab für dein Projekt. Ich beobachte den Thread schon länger. Ich habe damals die PDF mit der Protokoll erstellt. Sowas ähnliches hatte ich auch vor. Ein relativ simples Modul was nur auf dem AUX anschluss gesteckt wird. Das Problem ist das, dass Robonect Modul zwischen MMI und Hauptplatine gesteckt wird. Ich hatte trotz aktueller SW auf dem Robonect immer wieder mal das Problem das im Display SERVICE MODE eingeblendet wurde. Dann hieß es nur aufschrauben RESET drücken und wieder zu schrauben. Ich musste das so oft machen das die Schrauben jetzt nicht mehr halten. Ich habe mein Modul deshalb ausgebaut. Und wenn ich den Preis sehe für das neuste Robonect würde ich mich in den Hintern beissen wenn ich das dafür bezahlt hätte. Ich finde das die sinnvollste Funktion davon war das ich : - den aktuellen Fehler abfragen konnte - Einen Mähauftrag erteilen konnte. Heist-> Mähe jetzt für 5 Stunden Ich bin zeitlich nicht in der Lage bei der Software zu unterstützen. Ich könnte aber anbieten Hardware auf Basis deiner herzustellen falls es von jemanden gewünscht ist. Einfach um dein Projekt etwas anzutreiben. Gruß Follow2000
Nabend zusammen, zunächst besten Dank für den Tipp mit dem WebUpdater, habe ich eingebaut und funzt. Mega, jetzt kann ich das Modul eingebaut lassen. Und Danke für die Commands Start Stop, hatte primär das PDF Robomower_V0.8. An dieser Stelle auch besten Dank an Follow2000 für die Erstellung. Ich würde mein Modul erst nochmal testen wollen, dann kann ich gerne den Code hier mal anhängen. Gruß Nils
Hallo zusammen, ich habe mein Modul wieder in den Mäher eingebaut, aber aus den Antworten auf verschiedene Commands werde ich nicht schlau. Entweder kommt gar keine Antwort, oder nicht das was man erwarten würde. Ich habe zuletzt die Ursprungsversion von Markus (s. Anhang ESP8266_Robi_v2.ino) dann wieder aufgespielt um meine Ganzen Änderungen auszuschließen, aber leider auch ohne Erfolg. Hier ein paar Beispiele von Commands und Antworten vom Mäher. Hoffe ihr habt noch irgendeine Idee, woran das liegen könnte.
1 | STATUS cmd: 02-12-01-01-9F-03 response: 81-22-23-04-0c-05-11-27-00-00-00-00-00-00-47-15-7d-5e-c7-05-2f-0a-00-07-02-00-00-00-6b-03 |
2 | STATUS cmd: 02-12-01-01-9F-03 response: 81-22-23-04-0c-05-11-27-00-00-00-00-00-00-af-16-7d-5e-c7-05-39-0a-00-07-02-00-00-00-e4-03 |
3 | STATUS cmd: 02-12-01-01-9f-03 response: a0-05-01-2a-03 |
4 | |
5 | BATT cmd: 02-14-01-01-4e-03 response: a0-05-01-2a-03 |
6 | BATT cmd: 02-14-01-01-4E-03 response: 81-45-40-41-d8 |
7 | BATT cmd: 02-14-01-01-4E-03 response: 02-15-01-05-84-03 |
8 | |
9 | NEXT cmd: 02-06-01-05-2A-03 response: 81-50-05-81-03 |
10 | |
11 | DATE cmd: 02-02-01-01-D5-03 response: a0-20-10-e4-07-03-1a-04-86-03 |
12 | |
13 | CLOCK cmd: 02-02-01-00-8B-03 response: a0-20-10-15-09-37-b6-03 |
14 | CLOCK cmd: 02-02-01-00-8B-03 response: 81-20-10-15-10-06-08-03 |
nette Spielerei das Ganze, hätte mir früher auch Spass gemacht. Ich habe alle Automatiken rausgenommen. Wenn schönes Wetter und Bedarf starte ich den händisch. Und manchmal setze ich mich mit ner Tasse Kaffee auf die Terasse und schau dem Kerlchen zu, sehr entspannend :-) edit: nicht alles, was machbar ist macht auch Sinn :-)
Hallo Nils, versuch mal kürzere Kabel, ESP nicht in der Nähe vom Motor positionieren oder ein anderes Modul. Sonst probiere USB-Kabel dran, HTerm auf, über Browser Kommando absetzen. Sollte dann sofort und richtig in HTerm auftauchen und dann SOFORT selbst unten ein HEX String (Antwort) zurück schicken. Wenn das klappt, immer, dann ist es wohl eine Störung im Robi. LG
Angehängte Dateien:
-

Position_Modul_im_Maeher.jpg
230 KB
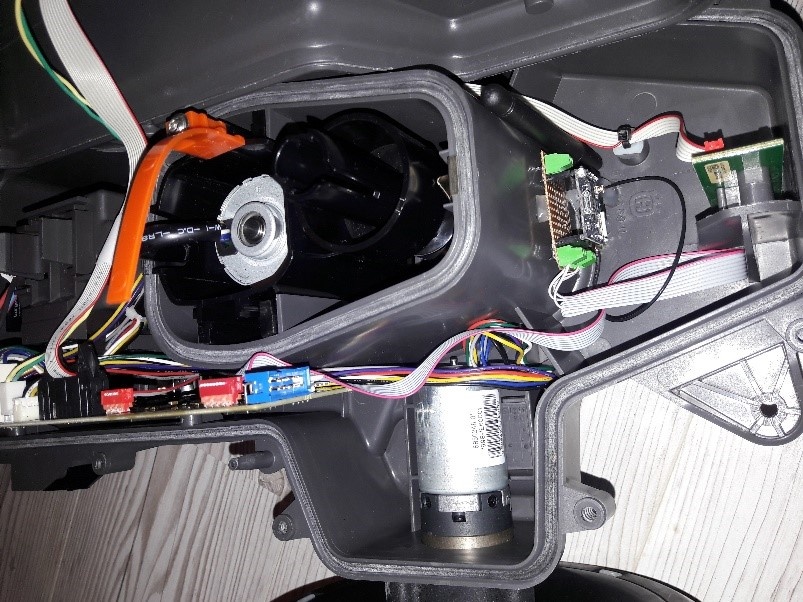
Guten Morgen Timo, vielen Dank für deine Rückmeldung. Das Modul habe ich ähnlich im R40li platziert wie in der Loxone-Anleitung von rob_r (siehe Foto). Ist die Position eher ungünstig? Aber ich kann das Kabel trotzdem vielleicht mal tauschen und dabei noch kürzen. Meinst du USB-Kabel an das Modul oder direkt an die Platine vom Mäher? Sorry, aber an der Stelle, auch mit HTerm habe ich wenig Erfahrung. VG Nils
Würde das Modul eher von deinem Bild aus gesehen oben links plazieren. Wichtig wäre die Leitung nicht parallel zu Moterleitung und evtl etwas kurzer. LG
Angehängte Dateien:
-

Neue_Position_Modul.jpeg
230 KB
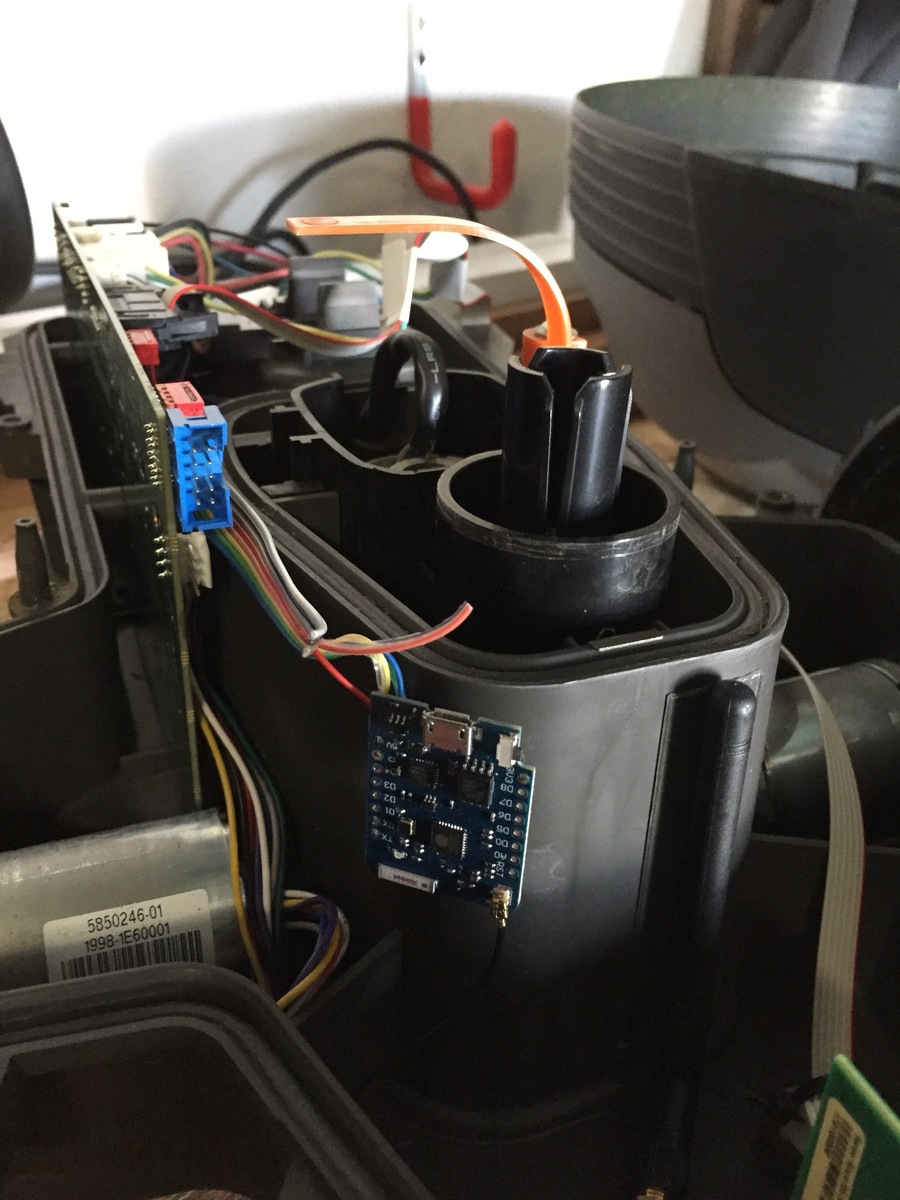
Habe das Kabel gekürzt und wie vorgeschlagen weiter oben links angebracht (s. Foto). Das scheint es wirklich gewesen zu sein, nochmal aller besten Dank für den Ratschlag.
Ich meinte eig. ganz oben links in der Ecke, ganz oben links... Aber wenn es so funktioniert... LG
Angehängte Dateien:
-

Wall-E_rootpage.png
150 KB -

Wall-E_webpage.png.png
90 KB
Ahoi, ich habe heute das Modul nochmal getestet und es scheint prinzipiell schon mal zu funktionieren. Ich bekomme hin und wieder noch fehlerhafte Antworten vom Mäher, vermutlich ist die Position immer noch nicht optimal (sorry Timo, habe ich missverstanden). Anbei habe ich aber mal meinen aktuellen Stand der Firmware hochgeladen. Vielleicht hat ja der ein oder andere noch Tipps zur Verbesserung, auch gerne Code-technisch, ist mein erstes Arduino-Programm. Die Krux ist hier ja vielleicht auch der Speicherverbrauch. Es ist so umgesetzt, dass das Modul alle 10s den Status und Battery und alle 120s die Timer abfragt und zwischengespeichert. Beim Log werden die letzten 15 Einträge gespeichert. Beim Aufruf der Webseite wir dann einfach der aktuelle Stand der Zwischenspeicherung ausgegeben. Soweit erstmal. Gruß Nils
Hallo Nils, ich beobachte diese Beiträge schon einige Jahre. Damals war mir das alles zu kompliziert und wenig Erfolgsversprechend. Ich selbst habe mir dann vor 3 Jahren das Connect Modul einbauen lassen. Mittlerweile funktioniert das auch ganz gut. Aber die WLAN Version interessiert mich weiterhin sehr. Könnte man mit Deiner Variante auch bei bestimmten Ereignissen eine Webseite aufrufen? Ich habe bei mir im Netz einen Webserver laufen, mit dem ich per Webseite diverse Steuerungen anspreche um etwas zu schalten, E-Mails + SMS versende, Audio Ausgabe über Lautsprecher (unser Grundstück ist 110m lang mit 3 Gebäuden) usw. Viele Grüße aus dem Taunus Burxel
@ Nils: Danke für die INO. Ich probiere es mal aus sobald ich langeweile hab :) Sieht gut aus. I LIKE.
Hallo Nils, danke für deinen Code. Sieht so weit gut aus, schön strukturiert. Jeder Programmierer hat da ja auch seinen eigenen "Style". Ich bin zeitlich gerade etwas ausgelastet, werde aber sobald es was neues gibt mich hier zu Wort melden. Noch eine Frage nebenbei: Geht dein Mäher "schlafen", wenn du häufig den Status abfragst? Ich bin noch nicht zum testen gekommen, aber meiner legt sich nach dem laden (nach Timer Ablauf) ja schlafen und ist erst kurz vor dem mähen (beim nächsten Timerstart) wieder erreichbar. Kann man das schlafen gehen durch Statusabfragen unterbinden? LG
Das funktioniert leider nicht. Ich frage den Status alle 2min ab. Aber wenn der Mäher den Ladevorgang beendet hat geht er „schlafen“. Ich kenne leider kein Kommando, mit dem sich das verhindern lässt.
Und bei kürzeren Intervallen? oder den Aktuellen Mode (AUTO,MAN,HOME) alle 20-30sek senden? Auf iwas muss er doch reagieren...
Wird der letzter Fehler auch angezeigt Timo? Gruß Follow2000
Was man in vielen Beiträgen ließt, lässt sich der Mäher im StandBy über den Aux nicht ansprechen bzw. aufwecken. Habe es selber noch nicht ausprobiert, wie er sich verhält. Werde es bei Gelegenheit mal beobachten, aktuell wird der Status alle 10s vom Modul abgefragt. @Burxel: Sowas ähnliches habe ich auch vor, z.B. bei einem Error eine Mitteilung aufs Smartphone zu schicken. Wobei ich das vermutlich über mein FHEM-Server regeln werde. Aber man kann bei bestimmten Ereignissen auch vom Modul aus eine URL aufrufen. Direkt im Code sogar relativ simpel. Aufwändiger wird es, wenn man das auch über ein Webinterface konfigurieren möchte.
Right, genau das ist das Kernproblem an der Lösung via Aux Port. Habe mein Projekt deshalb damals aufgegeben und bis heute keine Lösung dafür gesehen. Leider, sonst wäre es eine coole Sache.
Hallo zusammen, lese seit kurzem hier mit und habe mir gleich die nötige HW bestellt. Derzeit haben die meisten ja etwas mehr Zeit für solche Sachen. Als ich gestern die HW fertig hatte und mit dem SW anfangen wollte, habe ich den Beitrag von Nils mit seinem Code entdeckt. @Nils: Danke!!! Das erspart mir sehr viel Arbeit. Ich hab die SW noch etwas auf meine Bedürfnisse angepasst. 1. OTA-Update hinzugefügt - Damit kann ich direkt aus der IDE ein Update per Wlan einspielen 2. MQTT-Client integriert – so bekomme ich die Daten einfach in meinen IO-Broker 3. WifiMulti eingebunden – ich hab auf meinem Grundstück 3 AP. Somit kann er sich den jeweils besten suchen und falls die Verbindung abreißt, nimmt er den nächsten. So zumindest die Idee. Jetzt wollte ich die HW in meinem Husqvarna Automower 310 einbauen. Musste jedoch feststellen, dass die 18V Versorgung von Pin7 auch bei ausgeschaltetem Hauptschalter Spannung führt. Steht zwar hier irgendwo, aber ich hab es nicht gelesen. ;-( Ebenfalls hier im Forum steht, dass es auch einen Pin mit 5V geben soll. Diese werden wohl nur mit dem Hauptschalter ausgeschaltet. Kann mir bitte jemand sagen welcher PIN das ist? Mein 2. Problem: Mein Mower hat 2 Ports. AUX1 und AUX2. Hat schon jemand so ein Modul an dem 310 angeschlossen? Welchen Port soll ich nehmen? Danke für eure Hilfe! LG nosti
Moin, ich habe Robonect nun auch schon ein paar Jahre verbaut. Die anfänglichen Probleme, die o.g. wurden, sind inzwischen zum Glück alle behoben und das Modul läuft wirklich extrem stabil. Der Preis ist schon krass gestiegen, aber ab und zu gibt es Gutscheincodes. Z.b. funktioniert "Forum80" immer noch und bietet derzeit 30€ Rabatt. Auch was die Funktionalitäten angeht, haben die ordentlich zugelegt. Gibt inzwischen schon etliche Apps für iOS, Android und sogar Skills für Alexa und Google Home. Ich hatte damals auch überlegt, was eigenes zu entwickeln, bin nun aber froh, dass ich mir die Zeit gespart habe. ;-) [Ok, und meine Frau hat es mir verboten, da der Mäher sonst die meiste Zeit in meinem Bastelkeller stehen würde, als seiner Arbeit im Garten nachzukommen.... ;-) ]
@Nosti E. schrieb: > > Ich hab die SW noch etwas auf meine Bedürfnisse angepasst. > 1. OTA-Update hinzugefügt - Damit kann ich direkt aus der IDE ein > Update per Wlan einspielen .... Kannst Du den Teil noch posten?
Das würde mich auch wohl interessieren, prinzipiell sogar alle 3 Anpassungen. Würdest du das zur Verfügung stellen?
Angehängte Dateien:
-

pinbelegung.jpg
23 KB
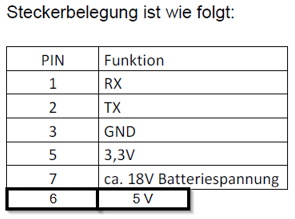
Nosti E. schrieb: > Jetzt wollte ich die HW in meinem Husqvarna Automower 310 einbauen. > Musste jedoch feststellen, dass die 18V Versorgung von Pin7 auch bei > ausgeschaltetem Hauptschalter Spannung führt. Steht zwar hier irgendwo, > aber ich hab es nicht gelesen. ;-( > Ebenfalls hier im Forum steht, dass es auch einen Pin mit 5V geben soll. > Diese werden wohl nur mit dem Hauptschalter ausgeschaltet. Kann mir > bitte jemand sagen welcher PIN das ist? Hilft dir da vielleicht die Anleitung von rob_r weiter? Zu finden unter folgendem Link: https://www.loxwiki.eu/pages/viewpage.action?pageId=48137811 Danach müsste es Pin6 sein, siehe auch beigefügte Abbildung daraus.
Hallo, hab heute Vormittag meinen Wemos am Mower angeschlossen. Dabei habe ich diesen gleich zerstört. Warum weiß ich leider auch nicht. Ich verwende einen kleinen step down Konverter um die 18V auf 3,3V runter zu regeln. Die 3,3V habe ich natürlich vorab genau eingestellt. Darf ich eigentlich den Wemos direkt mit 3,3V versorgen oder muss ich ihn über den 5V Pin versorgen? Bis jetzt habe ich meine Änderungen also nur am Schreibtisch getestet! LG Nosti
Sicherer ist 18V -> StepDown -> 5V -> Länksregler -> 3V3 Oder Vernünftigen DC/DC ala Floeth, Traco, Aimtec etc zu benutzen. StepDown ala China können auch mal kurze Spannungsspitzen beim starten durchlassen, was den ESP sofort in die "Cloud" befördert... Also besser 5V an den 5V Eingang des Wemos. Lg
Timo S. schrieb: > Sicherer ist 18V -> StepDown -> 5V -> Länksregler -> 3V3 Danke Timo! Werde ich beim nächsten machen. LG
Hi Nosti, danke für dein Sketch. Sehr gut. Ich habe die Version 1.14 verwendet. Diese Version kann ich auf Mini Pro laden, aber er verbindet sich nicht mit dem Netz. Hast du an der Version weiterentwickelt bzw. hast du eine neue Version in der Zwischenzeit verfügbar. Lief die Version auf deinem Mini Pro? Was ich an dieser Version sehr schätze ist dass es MQTT und OTA hat. Das ist hilfreich für einen Software update. Wenn man einen Software Update durchführen will, dass File was man brauch für den Update ist das nur ein ubgedated *.ino Sketch oder was lädt man dann? Gruss, Markus Wall-E_ESP8266_v1.15.ino
Hallo Zusammen, ich habe eine Idee wie man vielleicht ein Telegramm finden kann um den Mäher wenn er in der Ladestation steht aufzuwecken. Der Mäher wird über die STOP Taste auf jeden Fall geweckt. Die STOP Taste ist auf der MMI aufgesteckt. Die MMI ist mit der Hauptplatine verbunden. Die MMI Verbindung ist auch eine serielle Schnittstelle im 3,3V Pegel. Die Telegramme haben den selben Aufbau wie die Telegramme auf dem AUX Anschluss. Man muss mal loggen was die MMI der Hauptplatine sendet wenn man den STOP Taster betätigt, wenn der Mäher "eingeschlafen" ist. Und dann ausprobieren ob dieses Telegramm den Mäher über den AUX Anschluss aufweckt. Dafür müsste man einen Versuchsaufbau machen: Der Wemos D1 mini hat, so weit ich das im internet entnehmen konnte, 2 UARTs. Damit kommt man den auf dem MMI und den AUX Anschluss gleichzeitig. Die Software von dem Wemos müsste erkennen wann der Mäher eingeschlafen ist und die Telegramme vom 2 UART (MMI) auf einer Website ausgeben. Ich gehe mal davon aus, das wenn der Mäher eingeschlafen ist die serielle Verbindung von der MMI zur Hauptplatine ruhig ist. Drückt man dann den STOP Taster sollte das erste Telegramm was kommt den Mäher wecken. Ich versuche es selber mal das rauszubekommen. Ich weiss aber auch nicht genau was passieren muss damit der Mäher einschläft. Geht das vielleicht nur wenn er in der Ladestation steht ? .... kann natürlich auch sein das der STOP Taster über MMI -> MMI Kabel-> Hauptplatine einen Eingang an der Hauptplatine beschaltet und damit einen Interrupt auslöst. Das gucke ich mir heute abend bei meinem Mäher auf jeden Fall mal an. Ich weiß das der Kollege der das Robonect Modul entwickelt wegen der Einschlafproblematik deshalb die MMI Verbindung genutzt hat.
Hi Nosti, sorry habe den Sachverhalt falsch dargestellt. Ich kann die Version 1.14 verwendet. Diese Version kann ich auf Mini Pro laden, aber wenn ich die Version 1.15 nehme dann kann ich diese zwar laden, aber er verbindet sich nicht mit dem Netz, obwohl die WLAN Setting ok sind. Die Version 1.15 wäre gut für mich, da ich auch mit dem Iobroker arbeite und MQTT ist hier hilfreich hier. Hast du an der Software nochmal rumgebastelt? Gruss, Markus Wall-E_ESP8266_v1.15.ino
Hallo zusammen. Der Stop-Taster geht nach meiner Meinung direkt auf die Hauptplatine. (noch nicht genau geguckt) Man müsste wie bei dem Robonect die Pins von dem Stoptaster benutzen und dann über die Rx/Tx der MMI den Status abfragen (Fehler zu bestätigen? Pin erforderlich?) und dementsprechend Nachricht absetzen. Dabei müssen natürlich auch Nachrichten zwischen MMI & Hauptplatine durchgelassen werden. Hab einen zweiten 305er bekommen, der aber noch nicht funktioniert. Wenn der Lauffähig ist, werde ich weiter basteln und programmieren. Meine Hoffnung war ja, das der mäher nicht schlafen geht, wenn man zb alle 15 Sekunden den Status anfragt... (noch nicht getestet) LG Timo Edit: @ Markus: Nach dem überprüfen des Arduino-Sketch liegt *.bin und *.hex im Temp Ordner. Bsp: C:\Users\Nutzername\AppData\Local\Temp Die *.bin sollte es sein. @ Follow2000: Der ESP8266 hat 1 1/2 UART. Bei dem anderen fehlt leider der RxD. Wenn es wirklich so weit gehen sollte, evtl der ESP32 oder wie Robonect, einen MC mit mehreren UART angebunden am ESP8266.
Hallo Zusammen, sorry für die späte Antwort. Bei mir läuft der V1.15 seit gestern im Mower. Ich musste auf einen neuen Wemos warten. Den alten habe ich leider beim 1. Einbau zerstört. MQTT läuft soweit. Ich musste nur noch die Größe des Puffers in dem die Mower-Werte übergeben werden erhöhen. z.B. String(mower).toCharArray(buf, 25); Leider funktioniert OTA bei mir auch nicht mehr, sobald der Wemos im Mower verbaut ist. Wieso das so ist, kann ich leider auch nicht sagen. Am Schreibtisch hat es noch einwandfrei funktioniert. Das Webupdate funktioniert jedoch einwandfrei. @ Follow2000: Für den 2. Uart könntest du versuchen EspSoftwareSerial zu verwenden.
Hallo Zusammen ich könnte mein Wemos im Gardena RI-LI40 verbauen nach der Anleitung. Ich habe habe WLAN, OTA geht auch , sofern der Roboter gutes WLAN hat, aber er zeigt leider keine Reaktion über das WLAN Webfrontend. Ich verwende hier die Version 1.5. Ich werde ihn morgen nochmal aufschrauben, um zusehen ob was falsch lief mit dem TX and RX Kabel. Ich selber betreibe das Wemos über den 5 Volt Pin. Ihr redet oben im Chat, dass es besser wäre den Roboter über den 18 Volt zu betreiben. Was sind dort die Vorteile? Wenn es Vorteile hat, dann hänge ich morgen gleich ein DC-DC mit an und betreibe ihn auch mit 18 Volt. Im Program gibt es noch die Settings "boolean DebugOn = true;" , kann dem Roboter im Betriebe auch debugen oder muss es immer false sein? Gruss, Markus
Also ich verwende PIN 1 (RX) ,2 (TX),3 (GND) und 5 (3,3V) an meiner
Wemos D1 mini Pro.
Die bool-Variable 'DebugOn' muss im normalen Betrieb auf false stehen,
ansonsten bekommt man Pseudo-Antworten auf Commands. War mehr zum Testen
der Software.
Kommt denn garkeine Webausgabe oder nur keine Werte ('no response')?
Ansonsten reagiert der Mäher auf die Commands nur wenn der Mäher am
Mähen oder Laden ist. Die Weboberfläche sollte aber trotzdem kommen,
solange das Modul im WLAN ist.
Gruß Nils
Angehängte Dateien:
-

2.png
17 KB
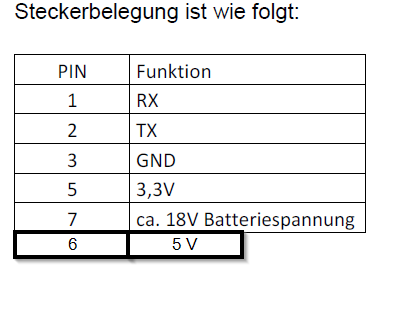
Hi Nils, Das WLAN geht bei mir mit den 5 Volt Pin bzw. muss man es mit den 3 Volt betrieben? D.h. ich bekomme Empfang und kann auch auf das Web Frontend zugreifen. Zumindest wird es angezeigt. Es wird leider auf dem Web Frontend bei allen Werten "no response angezeigt". Muss den Mäher morgen nochmal aufmachen und die TX und RX checken. Irgendwie kommt dort nix an. Br, Markus
Hi Nils, nur nochmal zur Bestätigung. Die Referenz am Flachbandkabel für den Stecker auf das AUX Port ist der Rote Pin, richtig? Rot wäre dann RX, dann TxD -> 2 GPIO15,GND -> 3 RST,EN,VCC -> 5 Gruss, Markus
Ja genau, so zumindest hab ich das. Pin 6 und 7 benutze ich nicht.
Angehängte Dateien:
-

Wemos-AUX.PNG
81 KB
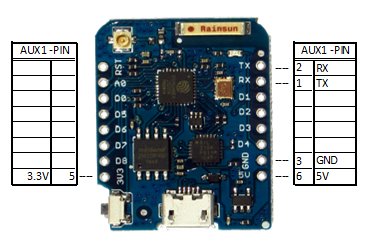
Hallo Markus, ich hatte zuerst meinen Wemos auch falsch angeschlossen. Die Tabelle oben ist aus Sicht vom µC und nicht vom Mower. Somit war RX und TX bei mir vertauscht. Anbei noch ein Bild vom Wemos mit den Aux Anschlüssen. Bei der Suche nach einem Bild habe ich jetzt auch herausgefunden warum mein WeMos D1 mini Pro einen schlechteren empfang als ein WeMos D1 mini hat. Um den externen Antennen-Anschluss nützen zu können, muss ich noch einen 0 Ohm Widerstand um löten. Ich muss immer wieder feststelle, lesen macht doch Sinn. Gruß Nosti
Angehängte Dateien:
Hi Nosti, danke für deinen Tip. Jetzt hat es funktioniert. Ich kann jetzt die Werte über das Web Frontend einsehen. Super Tip mit dem verdrehen von TX und RX das war die Lösung. Noch eine Frage zu hast geschrieben, dass man die Buffer erhöhen muss für MQTT. String(mower).toCharArray(buf, 25); String mytopic = (main_topic + "/stat/status"); mytopic.toCharArray(topic, 50); client.publish(topic, buf); bezieht die die Erhöhung für für die erste Zeile oder muss man alle Zeilen auf 25 erhöhen? Gruss, Markus
Angehängte Dateien:
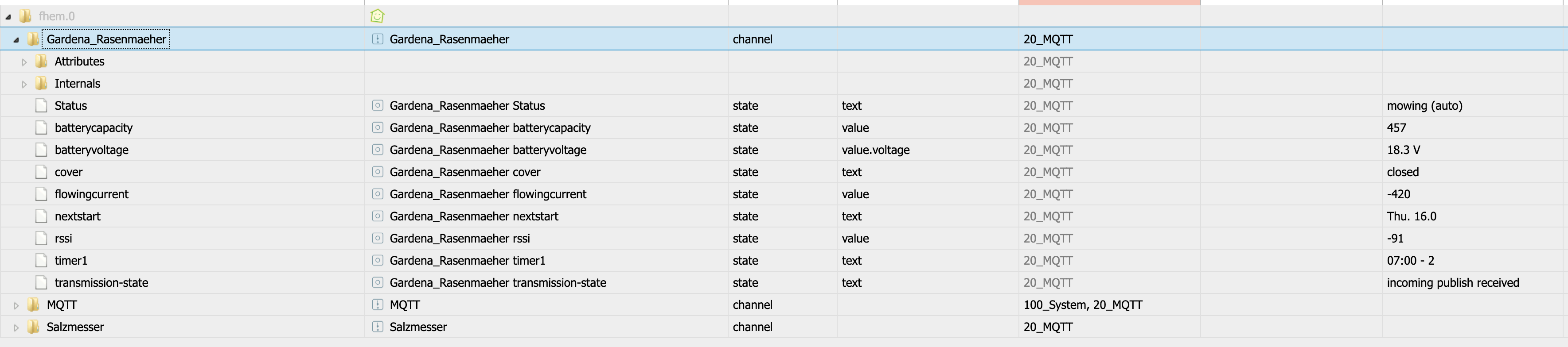
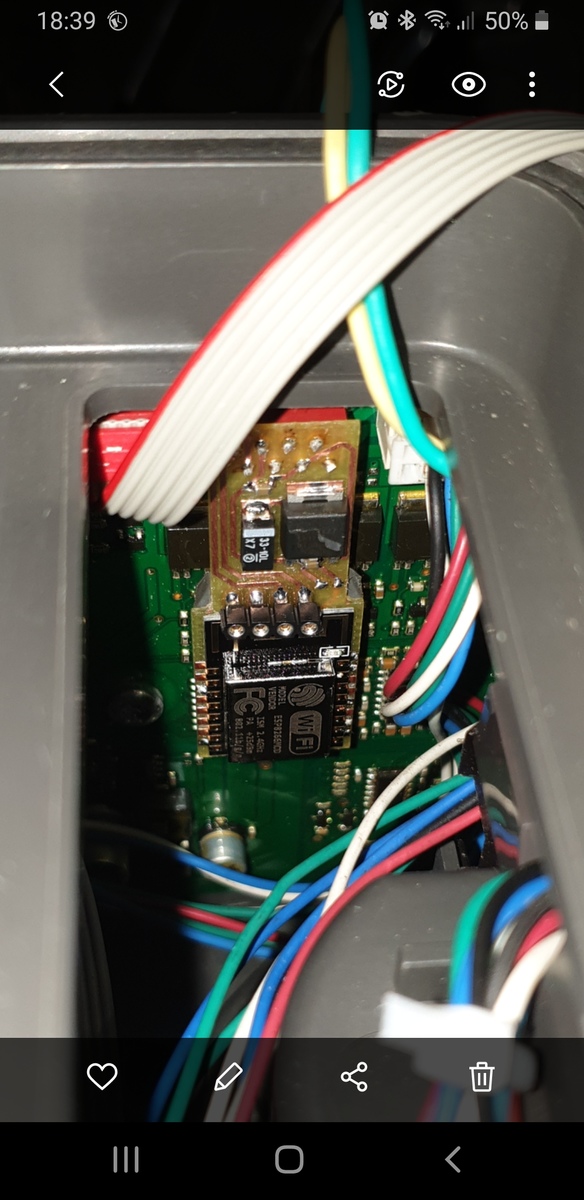{kind=link}
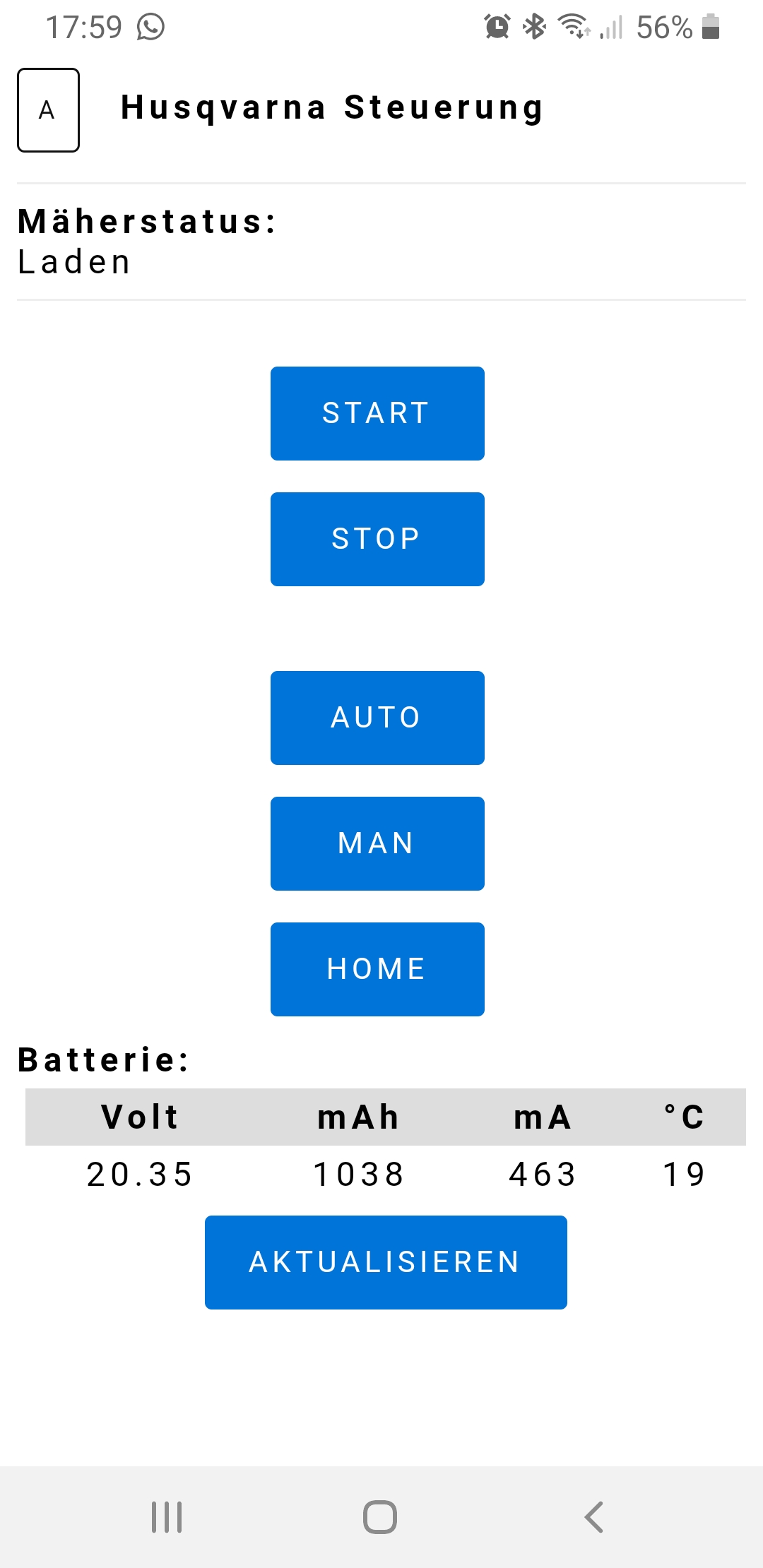{kind=link}
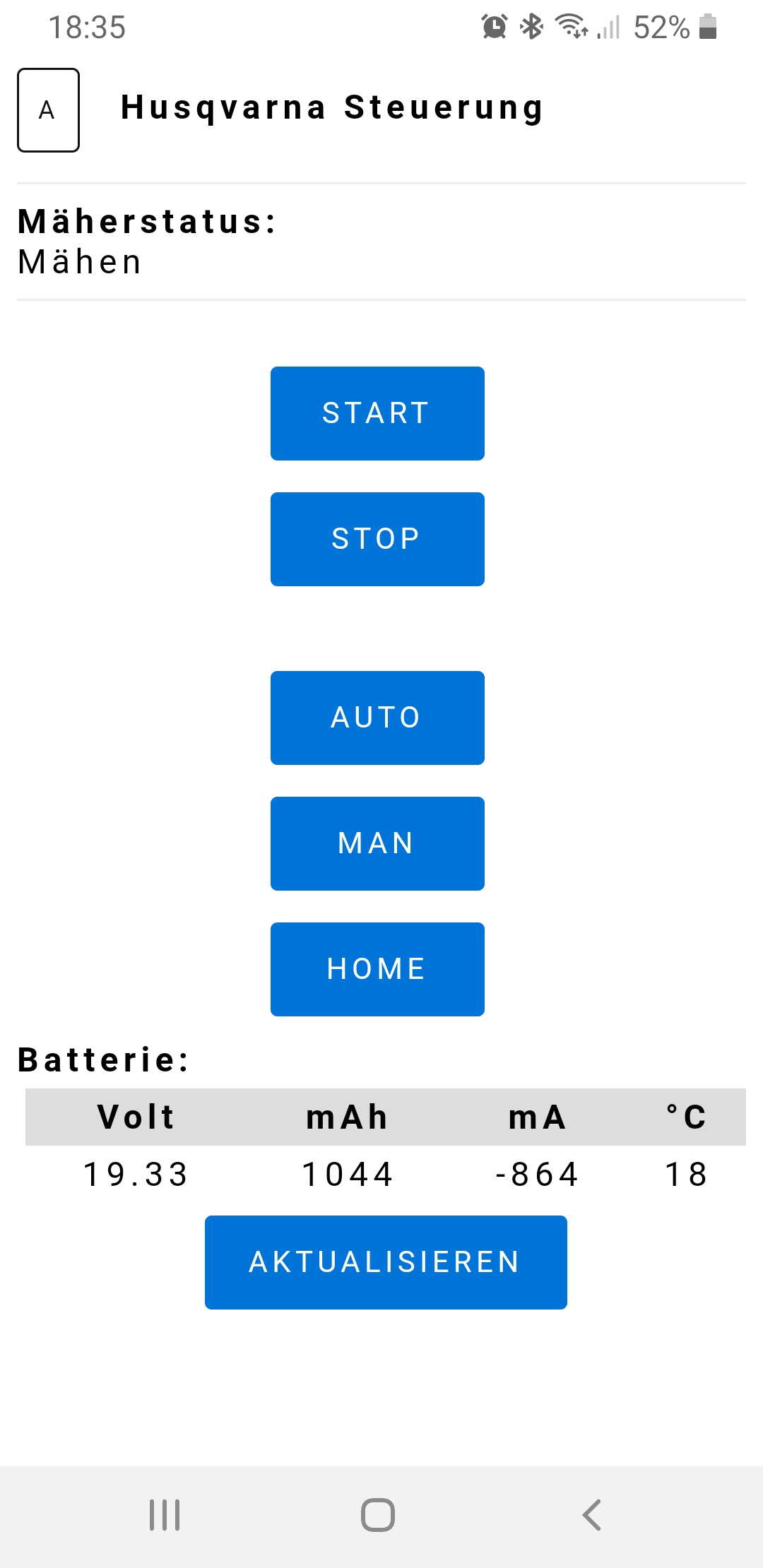{kind=link}
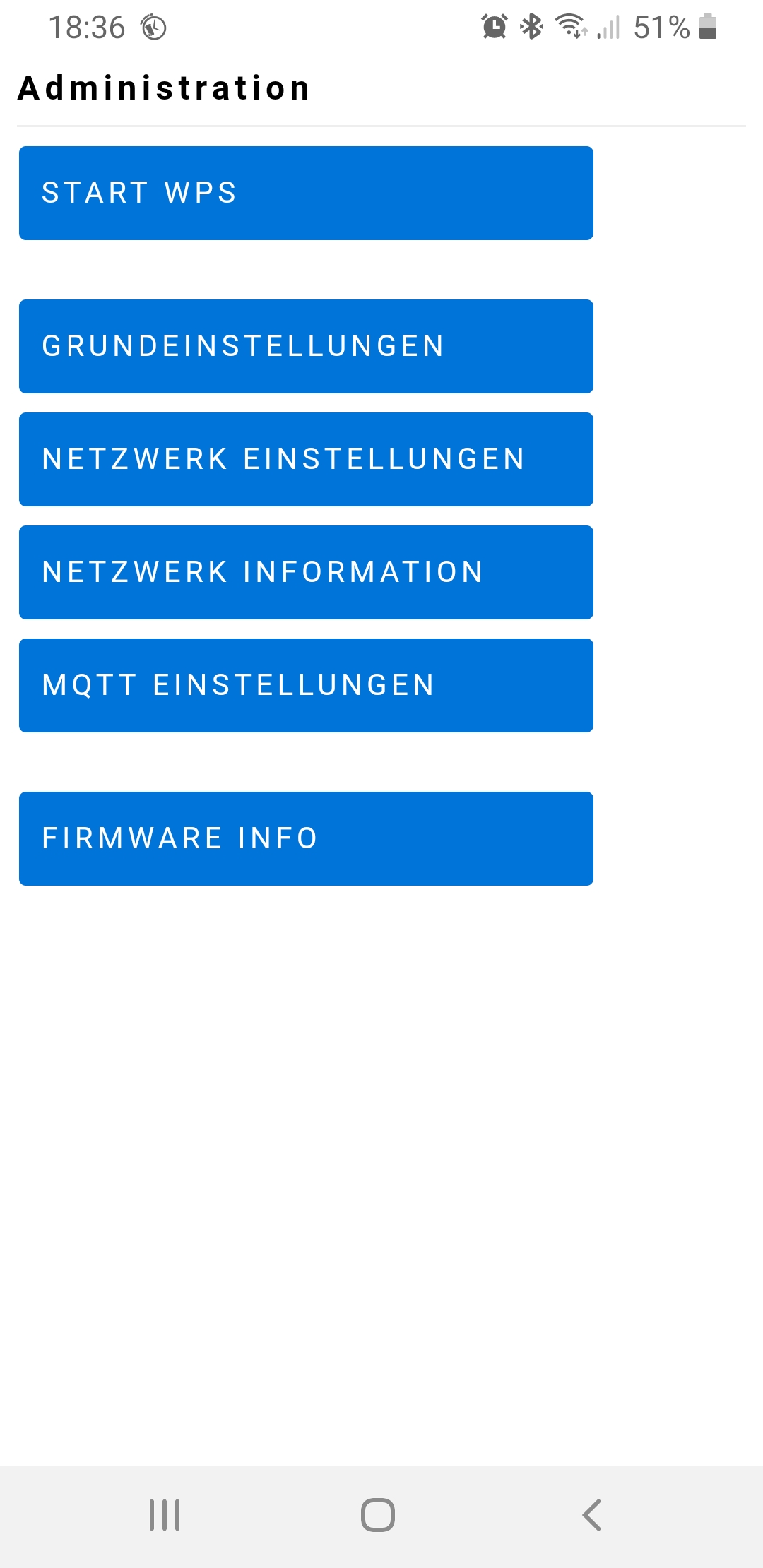{kind=link}
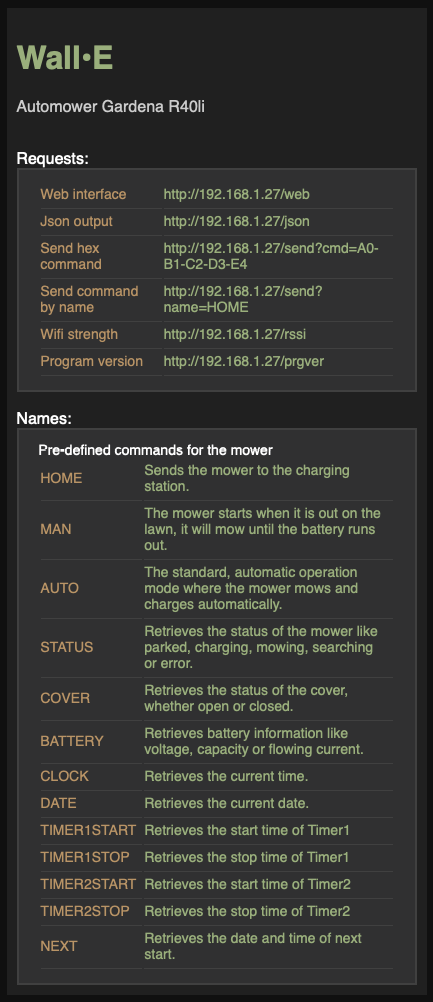{kind=link}
{kind=link}
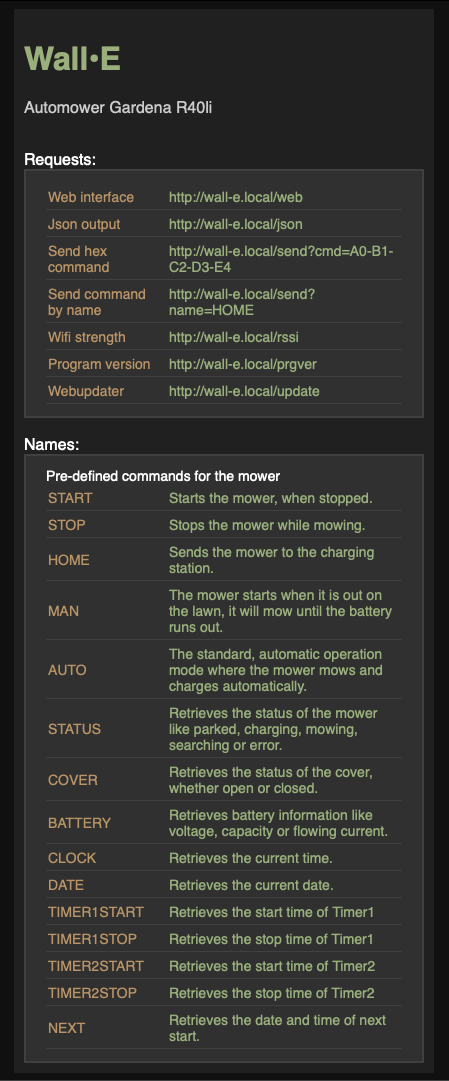{kind=link}
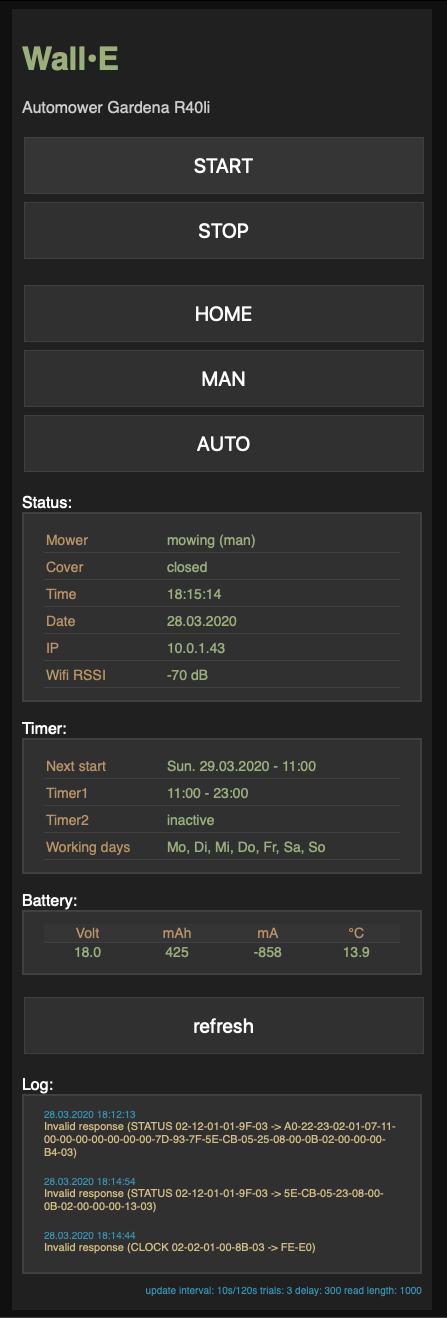{kind=link}
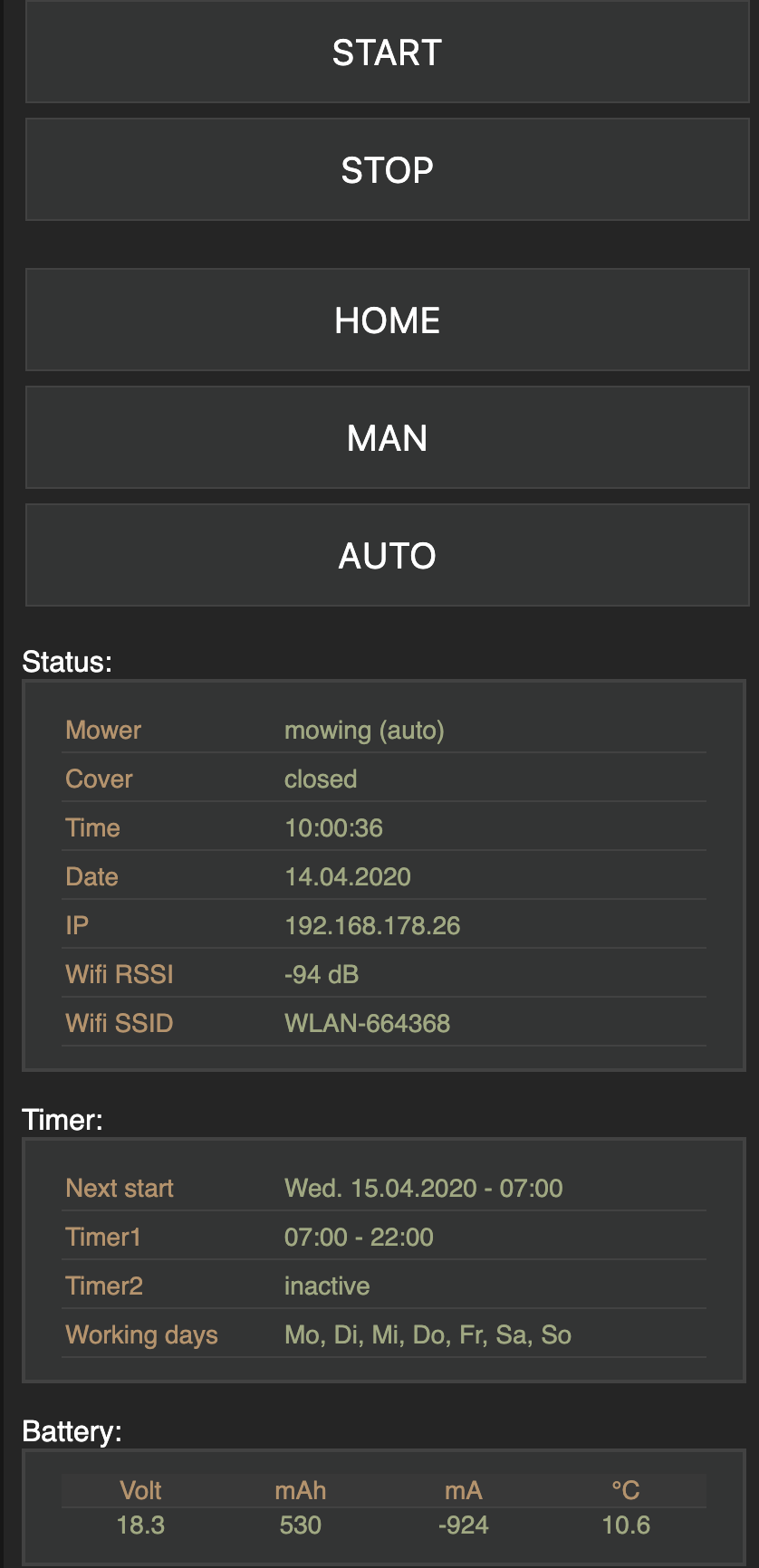{kind=link}
Hi Nosti Ich konnte heute die MQTT Werte im Iobroker integrieren. Wie gesagt die Werte sind irgendwie abgeschnitten. Gruss, Markus
Hallo Markus, darum musst du noch den Buffer erhöhen! Zeile 63:
1 | static char buf[25]; |
Ab Zeile 1373: die Länge von 10 auf 25 erhöhen
1 | toCharArray(buf, 10); |
-->
1 | toCharArray(buf, 25); |
Gruß Nosti
Hi Hosti Ja danke. Die Werte kommen jetzt einwandfrei über MQTT an. Was nur auffallend ist, dass der Mini mit WLAN irgendwie viel Strom frisst. Der Mäher geht viel schneller in die Ladestation. Der Mini Pro ist mit 70mAh abgeben. Muss mal die Größe vom Akku checken. Wenn er in der Ladestation ist, sind die Werte halt unbestimmt. Könnt man ggf schon im Code abfackeln, damit saubere Werte an dem MQTT ankommen. Gruß Markus
Hi Nosti
ich stehe gerade auf dem Schlauch. Wenn ich den Mäher per MQTT nach
Hause senden möchte, dann gehe ich auf MQTT topic:
Automower/cmnd/home
Was für einen Wert muss ich dann auf dem Topic setzen?
Normalerweise muss ich bei einer Lampe immer on oder Off setzen.
Gruss, Markus
_______________________________
#ifdef WITH_MQTT
void callback(char* gottopic, byte* payload, unsigned int length) {
String str = String();
String("0").toCharArray(buf, 10);
for (int i = 0; i < length; i++) {
str += (char)payload[i];
}
String mytopic = (main_topic + "/cmnd/home");
mytopic.toCharArray(topic, 50);
if(strcmp(gottopic, topic) == 0 & str == "1") {
ExecuteSerialCommand("HOME");
client.publish(topic, buf);
}
mytopic = (main_topic + "/cmnd/manual");
mytopic.toCharArray(topic, 50);
if(strcmp(gottopic, topic) == 0 & str == "1") {
ExecuteSerialCommand("MAN");
client.publish(topic, buf);
}
Hallo zusammen,
ein paar Anmerkungen zum 320er:
1. Aux1 funktioniert wie beschrieben. Pin1 ist links an der Kerbe, dann
wird im zickzack durchgezählt.
2. Das Bild mit der Steckerbelegung oben stimmt. RX vom WemosD1 kommt an
Pin2 vom AUX Stecker.
3. der 320er hat ein sehr schwaches serielles Signal. Auf dem WemosD1
muss man daher den 470 Ohm widerstand vom RX pin zum Treiberbaustein
entfernen. Vorher aber noch programmieren und OTA testen ;-)
4. Messen auf der Platine vom Mäher ist schwierig. Das Teil ist
lackiert.
5. Das wall-e Programm nutzt multiwifi. Damit geht aber OTA aus der
Arduino IDE heraus nicht mehr.
6. Ich hab den Empfangsteil umgeschrieben. Der war ein wenig hakelig.
bool WaitforSerial(unsigned int bytes, unsigned int timeout)
{
unsigned long now= millis();
while ( (millis() - now) < timeout){
if (Serial.available() >= bytes) return true;
server.handleClient();
}
return false;
}
String ReadSerialResponse(String name)
{
String response = "";
String separator ="-";
if(DebugOn)
return GetTestResponse(name);
if (! WaitforSerial(3,1000) ) return ("timeout1"); // wait
for first 3 bytes to come
response = int2hex(Serial.read(), 2); // start byte
response += separator + int2hex(Serial.read(), 2); // command byte
char payload = Serial.read();
response += separator + int2hex(payload, 2); // length
if (! WaitforSerial(payload+2,1000) ) return ("timeout2" +
response);
for (int i = 0; i< payload; i++){
response += separator + int2hex(Serial.read(), 2); // payload
}
response += separator + int2hex(Serial.read(), 2); // crc
response += separator + int2hex(Serial.read(), 2); // end byte
return response;
}
Hallo Markus, ich habe "1" verwendet.
1 | str == "1" |
Du kannst dort natürlich auch "ON" oder etwas anderes eintragen. Um zu erkenne ob der Befehl auch angekommen ist, wird dieser gleich wieder auf "0" zurückgesetzt.
1 | String("0").toCharArray(buf, 10); |
2 | client.publish(topic, buf); |
Gruß Nosti
Nabend, ich habe mal ein Repository bei GitLab für die Firmware angelegt. Link: https://gitlab.com/nbrgmn/wall-e-esp8266-automower Dachte darüber lassen sich jegliche Modifikationen und Verbesserung einfacher verwalten und versionieren. Der Masterbranch ist derzeit noch auf meiner initialen Version 1.14. Die Erweiterungen von Nosti mit v1.15 habe im Developbranch zumindest schon mal hinzugefügt. Habe die Version selber noch nicht getestet und die Anpassung bzgl. der Buffergröße für MQTT ist auch noch nicht drin. Die Modifikation der Methode ReadSerialResponse von Hans können wir auch gerne integrieren, wenn das besser läuft. Dann schreibt Hans, dass OTA mit MultiWifi nicht funktioniert...kann das jemand bestätigen oder auch dementieren? Hoffe der ein oder andere hat Lust an der Firmware zu schrauben. Bei Interesse gerne melden, dann nehme ich euch im Repo mit auf.
Danke Nosti, Perfekt. MQTT hilft wirklich bei FHEM oder dem IoBroker
Hallo, auch ich habe so einen R70Li mit Zeit- und Datums-Amnesie. Bin sehr an dieser Firmware interessiert, tolles Projekt! Hat jemand schon versucht, die Zeit und das Datum aus dem Netz in den Automower zu übertragen? Wenn das noch drin wäre, automatisch am besten, das wäre super! Ansonsten werde ich demnächst mal einen ESP8266 in den Mower verpflanzen, nur mal um nachzusehen, ob der Garten WLAN-mäßig gut erschlossen ist. (Auch mir waren die €180 für den robonect zu viel, nur zum Stellen von Datum und Uhrzeit.) Danke für die tolle Software und Gruß aus Stuttgart! Christoph
Hallo und schon mal 1000 Dank für die klasse Arbeit! Habe mir die Woche auch einen D1 Mini in meinen R70li installiert und funktioniert soweit wunderbar. Bei der Installation hatte ich nur leichte Probleme, da bei mir die Schrauben der Gummidämpfer eingerostet sind, sodass ich sie auch mit Kriechöl, etc. nicht aufbekommen habe. Meine Lösung war die Dämpfer am Mäher zu lassen und nur von der Oberseite her abzuschrauben - siehe auch folgendes Video: https://www.youtube.com/watch?v=0uoHgsoCFz0&feature=youtu.be&t=76 Ich würde mich die Tage an der Weiterentwicklung des Codes im Repository beteiligen - folgendes habe ich bei mir lokal umgesetzt: - Name und Typ des Mähers zentral setzen - MQTT default off (hatte mich anfangs gewundert, warum ich keine Webseite erreichen konnte - er hat auf den Server gewartet) - Weitere Fehler- und Statuscodes eingepflegt, da bei der R70li scheinbar ein paar andere HEX-Werte zurückmeldet - Ich hatte gestern einen Überlauf bei der Batteriekapazität (65432 mAh) - da wollte ich auch nochmal drauf schauen Ich nutze bei mir MultiWifi und hatte mich schon gewundert, warum ich keine Updates über OTA durchführen kann - die Aussage kann ich aus der Praxis bestätigen (Webupdate funktioniert tadellos). Verbunden ist der Mäher bei mir an FHEM über ein HTTPMOD (Daten vom JSON-Interface und Befehle über URL). Habe auch noch zwei offene Punkte: Gibt es einen Vorteil sich an die 18V-Versorgung zu hängen? Wenn der Mäher sich schlafen legt, ist er auch darüber nicht erreichbar, korrekt? Nutzt ihr Automatismen über die Hausautomatisierung? So wie ich es bisher raus lese gibt es dadurch, dass der Mäher nach dem Laden in den Ruhezustand geht keine Möglichkeit ihn zu automatisieren (z.B. bei Regen Heim zu fahren und dann wieder loszuschicken), oder?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.