Moin, ich habe versucht das ganze nachzubauen. Hat anfangs auch geklappt und ich konnte mich kurzzeitig verbinden. Aber dann ging das Display plötzlich aus und es fing vom Mainboard an zu stinken. :( Hab das Modul dann wieder abgeklemmt, aber das Display geht trotzdem nicht mehr an. Stattdessen ist mir aufgefallen, dass der Prozessor jetzt sehr heiß wird. Hab das ganze dann mal unter dem Mikroskop betrachtet und festgestellt, dass der wohl nu ein Loch hat. Ich könnte heulen! Hat jemand zufällig noch eine Hauptplatine über, die er mir verkaufen möchte? (Wenn meine Frau das erfährt, bekomme ich richtig mecker. Die hat gesagt, ich soll den Mäher in Ruhe lassen.... ;-) LG Manuel
Angehängte Dateien:
-

Mikro1.jpg
160 KB -

Mikro2.jpg
91 KB
Das ist natürlich nicht so gut :( Magst mal ein/zwei Bilder von deinem Aufbau schicken? Steuerung habe ich leider nicht mehr... Günstigster Neupreis (Schnellsuche) https://shop.mower24.de/Hauptplatine-Board-G3-P1 Defekt, evtl mit guter reinigung (+ paar Widerstände und FET´s tauschen)getan https://www.ebay.de/itm/Husqvarna-Gardena-Automower-Hauptplatine-defekt/283858542404?hash=item4217499f44:g:cnYAAOSwpGpeo~tq Vllt besser als nur Steuerung... https://www.ebay-kleinanzeigen.de/s-anzeige/husqvarna-automower-308-maehroboter-voll-funktionsfaehig/1385275922-89-4969 Oder mit Risiko https://www.ebay-kleinanzeigen.de/s-anzeige/husqvarna-automower-308/1384561100-89-3010 LG
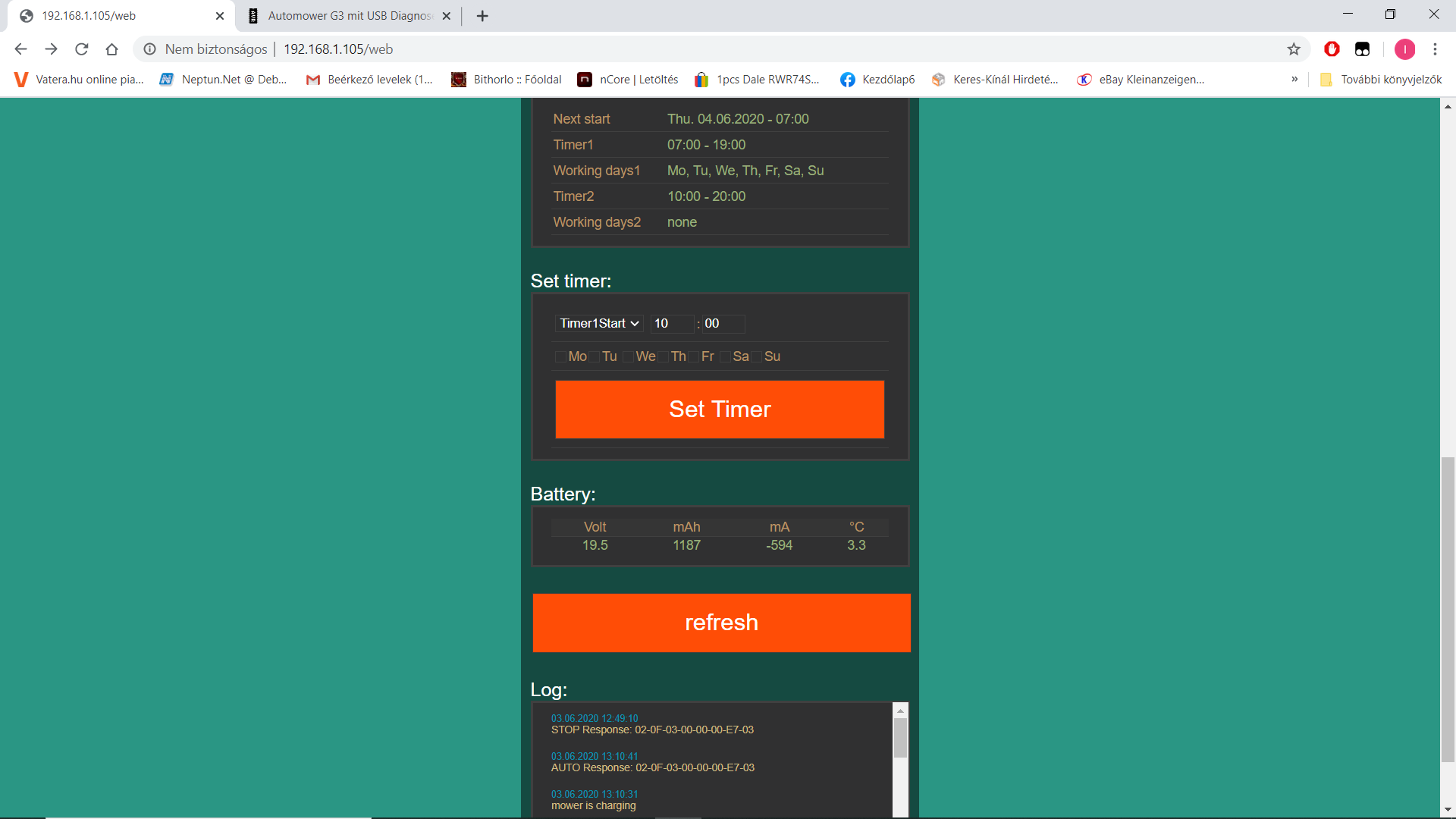
Hallo zusammen, ich habe meine Änderungen am developer-branch eingecheckt: https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/tree/develop - Variablen Mähernamen und Typ über Variable - Fehlercodes des R70li ergänzt - "(auto)"/"(man)" beim Status ergänzt beim Parken, etc. - Automatische CRC-Berechnung über "/send?cmdAutoCrc" über die Webseite - Ausgabe der Starttage für Timer2 über die Webseite (Starttage von Timer 1 und 2 können unabhängig gesetzt werden) - Setzen der Start- und Endzeiten für Timer1/2 über die Webseite - Automatisierungs-Befehle über "/send?automation": MOWTODAY / MOWNEXTDAY (z.B. bei Regen) / ABORTDAYS (entfernt die geplanten Tage bei Timer2) Meine Automatisierung mache ich so: - Timer1 ist auf jeden Tag von 10:00-10:10 gesetzt - Bei aktivem DEF "WITH_AUTOMATION" wird der Mäher als erste Aktion des Programms auf STOP gesetzt - Nach 17 Minuten (einstellbar) wird der Mäher wieder auf AUTO gesetzt - Timer2 ist bei mir von 10:10-20:00 gesetzt, aber kein Tag beim Start hinterlegt - Mit dem Befehl MOWTODAY wird der Tag von Timer2 auf heute gesetzt und die Automatik gestartet - Wenn es zu regnen anfängt und der Mäher aktiv ist, setzt meine Automatisierung (FHEM) ein "MOWNEXTDAY" ab, was den aktuellen Tag von Timer2 entfernt und auf den nächsten Tag setzt - der Mäher fährt zurück und startet am nächsten Tag. Hier sind außerdem meine Definitionen für FHEM:
1 | defmod Mower HTTPMOD http://xxx.xxx.xxx.xxx/json 60 |
2 | attr Mower reading01Name Status |
3 | attr Mower reading01Regex "mower":"([a-zA-Z0-9-:() ,']*)" |
4 | attr Mower reading02Name Cover |
5 | attr Mower reading02Regex "cover":"([a-zA-Z0-9-:() ,']*)" |
6 | attr Mower reading03Name BatteryVoltage |
7 | attr Mower reading03Regex "batteryvoltage":"([0-9.]+) V" |
8 | attr Mower reading04Name BatteryCapacity |
9 | attr Mower reading04Regex "batterycapacity":"\s?(.+) mAh" |
10 | attr Mower reading05Name FlowingCurrent |
11 | attr Mower reading05Regex "flowingcurrent":"\s?(-?[0-9.]+) mA" |
12 | attr Mower reading06Name Temperature |
13 | attr Mower reading06Regex "temperature":"([0-9.]+)" |
14 | attr Mower reading07Name LastLogEntry |
15 | attr Mower reading07Regex "lastlogentry":"([a-zA-Z0-9-:.() ,']*)" |
16 | attr Mower reading08Name NextStart |
17 | attr Mower reading08Regex "nextstart":"([a-zA-Z0-9-:.() ,']*)" |
18 | attr Mower set01Name Start |
19 | attr Mower set01NoArg 1 |
20 | attr Mower set01URL http://192.168.178.72/send?name=START |
21 | attr Mower set02Name Stop |
22 | attr Mower set02NoArg 1 |
23 | attr Mower set02URL http://192.168.178.72/send?name=STOP |
24 | attr Mower set03Name Home |
25 | attr Mower set03NoArg 1 |
26 | attr Mower set03URL http://192.168.178.72/send?name=HOME |
27 | attr Mower set04Name Manual |
28 | attr Mower set04NoArg 1 |
29 | attr Mower set04URL http://192.168.178.72/send?name=MAN |
30 | attr Mower set05Name Automatic |
31 | attr Mower set05NoArg 1 |
32 | attr Mower set05URL http://192.168.178.72/send?name=AUTO |
33 | attr Mower set06Name MowToday |
34 | attr Mower set06NoArg 1 |
35 | attr Mower set06URL http://192.168.178.72/send?automation=MOWTODAY |
36 | attr Mower set07Name MowNextDay |
37 | attr Mower set07NoArg 1 |
38 | attr Mower set07URL http://192.168.178.72/send?automation=MOWNEXTDAY |
39 | attr Mower set08Name AbortDays |
40 | attr Mower set08NoArg 1 |
41 | attr Mower set08URL http://192.168.178.72/send?automation=ABORTDAYS |
42 | attr Mower stateFormat Status |
1 | defmod di_Mower_Start DOIF ([10:05|Mo Fr]) (set Mower MowToday) DOELSE |
1 | defmod di_Mower_Rain DOIF ([WeatherStation:isRaining] eq "yes" and ([Mower:Status] eq "mowing (auto)" or [Mower:Status] eq "searching")) (set Mower MowNextDay) DOELSE |
Viel Erfolg! :-)
Moin zusammen, erstmal vielen Dank für eure tolle Arbeit hier! Bei mir lief bis heute der wall-e Code in der Version 1.15 ohne wifiMulti. MQTT ist sehr praktisch. Das ganze lief über Wochen ohne große Probleme. Ab und zu hängst dich das Webinterface auf (Ping funktioniert noch) und mein Gardena R70Li nimmt die Befehle nicht an. Alles halb so wild. Ich habe heute die Änderungen von Daniel (wall-e Version 1.16) übernommen. Der Mäher bleibt nun nach ein paar Sekunden einfach stehen. Scheint den Befehl STOP vom esp (wemos d1 mini pro) zu bekommen. Man kann ihn wieder über die Commands oder am Mäher starten, aber der bleibt wieder nach ein paar Sekunden stehen. Egal im welchem Modus er sich befindet. Ich hab schon alles mehrfach überprüft. Im Code hab ich dann den Teil mit der Automatisierung komplett rausgenommen und sogar ein aufspielen der zuvor installieren Version 1.15 brachte keine Besserung. Am Ende habe ich den esp ausgebaut und nun fährt der Kleine wie gewohnt. Was mich wundert ist, dass auch ein aufspielen von alten Version keine Besserung gebracht hat. Ich werde mir mal den neuen Code die Tage mal genauer angucken und das Ganze noch mal testen. Vielleicht hat einer von euch dasselbe Phänomen? Grüße Alexei
Hallo Alexei, dass der Mäher nach dem Aktivieren in STOP versetzt wird, ist so gewollt - siehe auch die Info aus meinem vorherigen Beitrag: "- Bei aktivem DEF "WITH_AUTOMATION" wird der Mäher als erste Aktion des Programms auf STOP gesetzt" Nach ~17 Minuten wird er automatisch wieder gestartet. Manuelles Starten über die Weboberfläche oder das Bedienpad des Mähers funktionieren bei mir ebenfalls problemlos. Ich habe übrigens auch einen Wemos D1 mini Pro verbaut. Das einzige was ich mir gerade vorstellen kann wäre ein Kabelbruch, der bei der Bewegung des Mähers kurz zu einem Spannungsabfall und Neustart des esp führt und damit regelmäßig den STOP-Befehl auslöst. Warum das aber bei der Version 1.15 auch auftritt, kann ich mir dann nicht erklären...
Hallo Daniel, es muss am esp oder der Software liegen. Einen Kabelbruch kann ich ausschließen. Das Problem trat direkt nach einem OTA Update auf Version 1.16 auf und der Mäher fährt mit ausgebautem Modul ohne Probleme. Neustarten des esp fällt auch weg, dass würde ich in der Ping History sehen. Bei einem Neustart gibt es bei mir immer 1-2 Paketverluste. Ich muss es nun mit einem anderen esp testen. Melde mich dann noch einmal. Danke.
Nabend, ich habe den Fehler in meiner Heimautomatisierung (Home Assistant) gefunden. Ich habe mit der Rest API rumgespielt und dabei wurde alle paar Sekunden STOP an den Mäher gesendet. Hab's jetzt durch Zufall entdeckt. Facepalm Sorry für meine letzten Beiträge. Der Code funktioniert super und auch die Automatisierungserweiterung von Daniel ist eine feine Sache. Gruß Alexei
Hallo Daniel sorry, kannst du nochmal kurz erklären und darauf eingehen, warum der Mäher nach dem Start wieder (kurz) auf Stop gesetzt werden muss? Die Variable im Code habe ich gefunden: //********************************************************************** * //*** AUTOMATION ****************************************************** //********************************************************************** * #define WITH_AUTOMATION int automationStartTimer = 1020; // seconds Was muss ich jetzt genau tun, wenn ich den Mäher am morgen aus der Ladestation starten möchte? Gruss, Markus
Hallo, ich habe meine Timer so gesetzt: - Timer1 ist auf jeden Tag von 10:00-10:10 gesetzt - Timer2 ist bei mir von 10:10-20:00 gesetzt, aber kein Tag zum Start hinterlegt (über die Weboverfläche des ESP gesetzt) Wenn der Mäher um 10:00 am Morgen startet, wird er vom ESP sofort gestoppt. Nach der in der Variablen "automationStartTimer" hinterlegten Zeit wird der Mäher vom ESP wieder gestartet, damit er am nächsten Morgen wieder aufwacht (idealerweise ist die Zeit mindestens so lang, dass Timer1 schon abgelaufen ist und kürzer als der Mäher wieder in Standby geht). Zum Starten des Mähers das Kommando "MOWTODAY" senden (http://x.x.x.x/send?automation=MOWTODAY) - dadurch wird der Starttag von Timer2 auf den aktuellen Tag gesetzt. Falls es während des Mähens regnen sollte, kann über "MOWNEXTDAY" der Starttag von Timer2 auf den nächsten Tag gesetzt (http://x.x.x.x/send?automation=MOWNEXTDAY). Über das Kommando "ABORTDAYS" kann man die Tage für Timer2 wieder entfernen (http://x.x.x.x/send?automation=ABORTDAYS).
Hallo Daniel, ok jetzt ist es klarer wie es die Logik funktioniert. Wie funktioniert es beispielsweise wenn der Rasenmäher auf einen Hindernis läuft und hängen bleibt. Wie ist dann der Ablauf. Heisst es dann ich kann einfach den Fehler quittieren und auf am Mäher Startknopf drücken oder muss ich alles erneut über das WEb Interface schalten? Markus
Wenn der Mäher wegen einem Hindernis stoppt kannst du ihn wieder einschalten. Sollte er in der Zwischenzeit in Standby gegangen sein, würde er als erste Handlung gestoppt und dann wieder mit den bestehenden Einstellungen automatisch gestartet werden. Ich habe noch kleinere Optimierungen im Programm eingepflegt (Version 1.17 - https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/tree/develop): - Beim Automatisierungsprogramm wird der Mäher als erste Handlung gestoppt und jetzt nach Ablauf von Timer1 auf Start gesetzt (automationStartTimer wird nicht mehr benötigt) - Wenn die Endzeit von Timer2 erreicht ist, werden über das Kommando "ABORTDAYS" alle Arbeitstage aus Timer2 gelöscht (bei mir hatte sich der Mäher teilweise nicht mehr automatisch gestartet - z.B. am Donnerstag, wenn in Timer2 noch der Mittwoch hinterlegt war) - Gleich nach dem Start werden alle Werte vom Mäher abgerufen (Status, Datum, Uhrzeit, Timer, etc.) - Die Kommandos auf der Webseite sind mit Links hinterlegt, sodass man alle Kommandos direkt von der Webseite ausführen kann
Ich habe noch einen Fehler in meiner FHEM-Konfiguration gefunden - so lautet die korrekte Definition zum Starten:
1 | defmod di_Mower_Start DOIF ([10:05|Mo Fr]) (set Mower MowToday) DOELSE |
2 | attr di_Mower_Start do always |
Angehängte Dateien:
Hallo Daniel! Du hast ein super kleines Programm gemacht. Es gibt einen Husqvarna AM 305 Ich habe ESP WiFi eingebaut. Mit dem Programm 1.17. Die Batterietemperatur wird nicht richtig angezeigt. Können Sie dabei helfen? Ich hänge das Bild an. Vielen Dank. István
Danke an alle die hier mitwirken! Ich probiere die Version 1.17 aus. Ich binde diese jetzt in Loxone ein und poste das dann mal. Zwei Fragen: 1.) OTA funktioniert bei mir auch nicht. Gibt es hierfür eine Lösung? 2.) Ich habe die Platine eingebaut mit der Version 1.17 und meine ursprünglichen Timer nicht angefasst. Mit eingebauter Platine fährt er nun nicht mehr automatisch los. Ich muss dann auf Start klicken. Hat das auch jemand feststellen können?
Angehängte Dateien:
-

image0.jpeg
230 KB

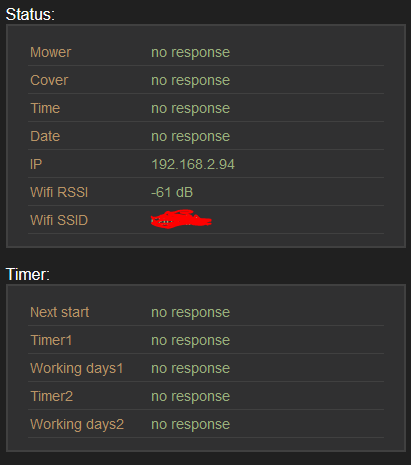
Hallo und besten Dank an alle Mitwirkenden ihr macht eine klasse Arbeit. Ich habe einen AM 310 und das wall-e ino 1.17 auf meinen ESP geflasht, ansich läuft der ESP supi, Weboberfläche funktioniert perfekt. Leider bekomme ich immer eine "no response" Meldung. Mein AM hat 2 AUX Anschlüsse, an beiden bekomme ich diese Meldung. Ich versorge den ESP8266 ESP-12F mit den 5V aus Pin 6 mit der Masse von PIN3 ... zudem sind PIN1 mit TX am ESP und Pin2 mit dem RX am ESP verbunden. Liege ich mit dem ESP-12F falsch, den hatte ich noch Zuhause? Ist der Wemos D1 mini die bessere Alternative? RX und TX habe ich erfolglos getauscht. Wenn ich am ESP RX und TX verbinde klappt der LOOP und er meldet zumindest den Request als Response. Was kann ich noch tun? Vielen Lieben Dank aus Berlin Chris
Christian M. schrieb: > ESP8266 ESP-12F Genauer ist es ein NodeMCU ESP-12F. Falls das irgendwie relevant ist. LG
Ich muss mich korrigieren. OTA funktioniert :) Man muss nur wissen wie es geht. Auswahl im Web Frontend = Firmware Dann das BIN File auf dem PC Lokal finden, meist unter : C:\Users\MYNAME\AppData\Local\Temp\arduino_build_.... (Am besten nach dem Datumsstempel schauen)
Angehängte Dateien:

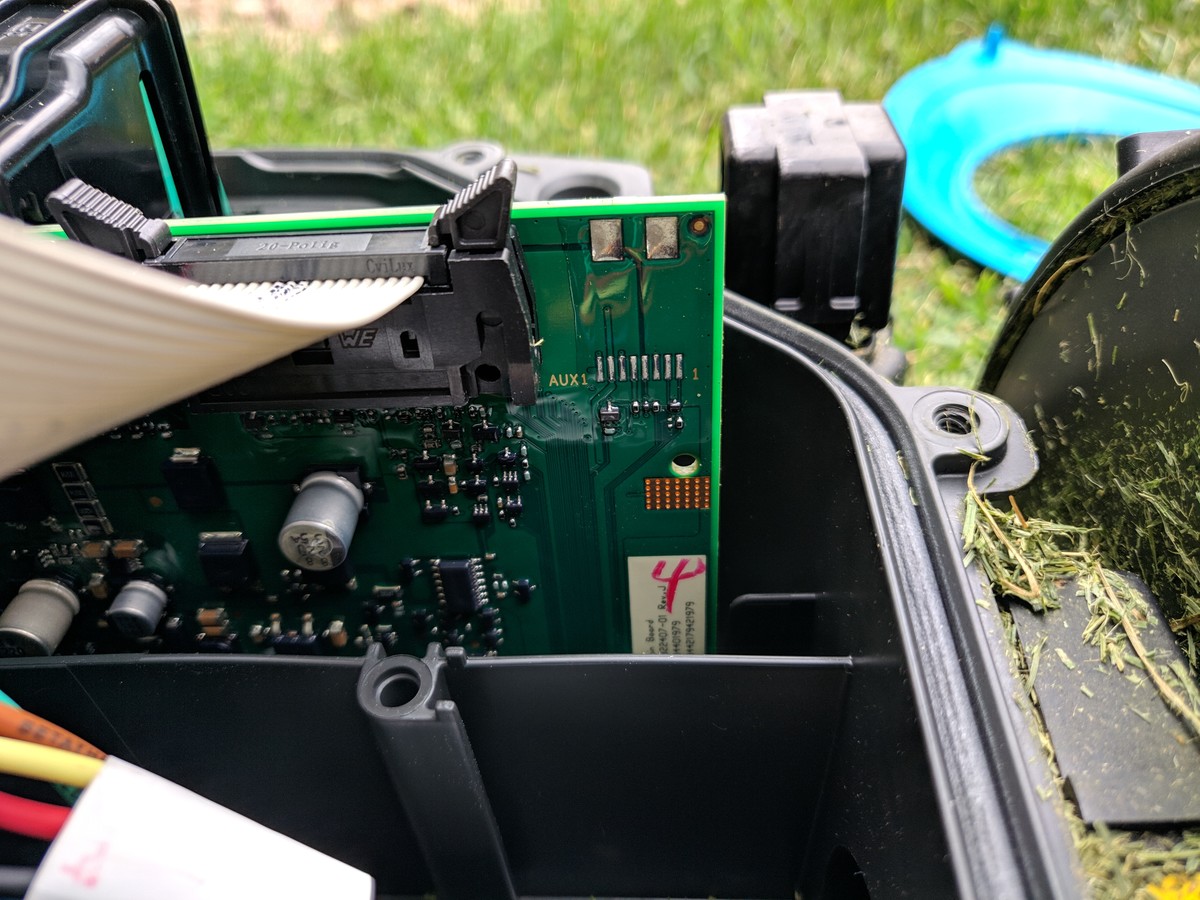
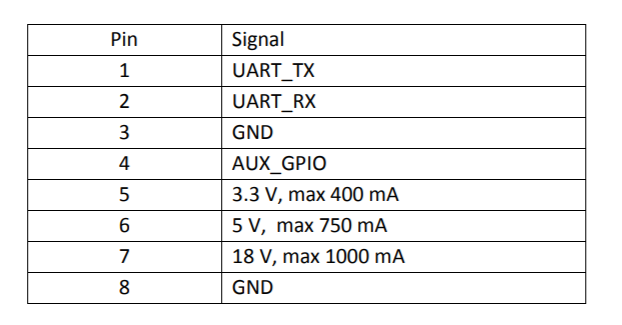
Hello Kris, I may be a bit late. But I'm so curious. Are you talking about these Aux ports in the picture. I'm interested of the pinout of the AUX ports on the mother board of the Husqmower 320. Would you have a diagram / drawing with all the 8 different pins. The idea is to add an ESP8266 with WIFI. Thanks for your help, Luc
@István S.: Die Ehre gebührt Markus K., Nils B. und weiteren, die das Programm ursprünglich erstellt haben :-) Die Batterietemperatur wird nur aus dem Telegramm des Mähers genommen und als Real-Wert angezeigt - siehe auch das Dokument Robomower, Kapitel "Batterie Status abfragen", Byte10: https://www.mikrocontroller.net/attachment/278555/Robomower_V0.8.pdf Hast du den Wert beobachtet - brauchst du ggf. nur einen Offset aufzurechnen o.ä.? @Rob R.: Was meinst du genau mit "Mit eingebauter Platine fährt er nun nicht mehr automatisch los. Ich muss dann auf Start klicken. Hat das auch jemand feststellen können?"? @Christian M.: Nils B. hatte ein ähnliches Problem, dass er immer fehlerhafte Antowerten erhalten hat. Bei ihm hat es mit einer kürzeren Leitung von AUX zum ESP geklappt - siehe auch Beitrag "Re: Automower G3 mit USB Diagnoseport fernsteuern?" @Luc D.: Have a look at the following document Robomower which shows the different pins on AUX1: https://www.mikrocontroller.net/attachment/278555/Robomower_V0.8.pdf Unfortunatelly, I am not aware of pin assignment of the other AUX-ports.
Hallo Daniel, vielen Dank erstmal für die Antwort, ich werde mal das Kabel einkürzen, vielleicht war es das schon. Gibt´s denn noch ne Meinung zu AUX1 oder AUX2? Gibt es da gut und schlecht oder macht das keinen Unterschied? Ich versuchs weiter... ich melde mich wenn ich neue Ergebnisse habe. LG Chris
Daniel D. schrieb: > > @Rob R.: Was meinst du genau mit "Mit eingebauter Platine fährt er nun > nicht mehr automatisch los. Ich muss dann auf Start klicken. Hat das > auch jemand feststellen können?"? Ich habe die Befehle etc. in Loxone eingebunden. Bei meinem ersten Versuch Startete er garnicht sondern fuhr zu Timer1 Zeit los und wieder zurück sprich nur ca. 10 Min. Habe dann die Timer zurückgesetzt und erneut eingestellt. Mein zweiter Versuch gestern. Ich sende wie beschrieben ein MOWTODAY ab und er fährt los. Zum Ende des Timer2 bleibt er dann einfach stehen anstatt in die Ladestation zu fahren. ....Ich teste weiter :) Was mir sehr gut gefällt, das Programm reagiert sehr schnell! Richtig gut programmiert.
Daniel D. schrieb: > Ich habe noch kleinere Optimierungen im Programm eingepflegt (Version > 1.17 - > https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/tree/develop): > - Beim Automatisierungsprogramm wird der Mäher als erste Handlung > gestoppt und jetzt nach Ablauf von Timer1 auf Start gesetzt > (automationStartTimer wird nicht mehr benötigt) Kurze Frage zum Programm: d.h. ich setze kein MOWTODAY ab? sprich nach Timer1 Stop Zeit (z.B. 10:10) wird ein MOWTODAY abgesetzt? > - Wenn die Endzeit von Timer2 erreicht ist, werden über das Kommando > "ABORTDAYS" alle Arbeitstage aus Timer2 gelöscht Das führte glaube bei mir dazu dass er dann zur Endzeit stehen bleibt und nicht in die Ladestation fährt. Ggf. muss ein HOME abgesetzt werden?
Rob R. schrieb: > Ich habe die Befehle etc. in Loxone eingebunden. > Bei meinem ersten Versuch Startete er garnicht sondern fuhr zu Timer1 > Zeit los und wieder zurück sprich nur ca. 10 Min. Habe dann die Timer > zurückgesetzt und erneut eingestellt. > Mein zweiter Versuch gestern. Ich sende wie beschrieben ein MOWTODAY ab > und er fährt los. Zum Ende des Timer2 bleibt er dann einfach stehen > anstatt in die Ladestation zu fahren. > ....Ich teste weiter :) Rob R. schrieb: >> Ich habe noch kleinere Optimierungen im Programm eingepflegt (Version >> 1.17 - >> https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/tree/develop): >> - Beim Automatisierungsprogramm wird der Mäher als erste Handlung >> gestoppt und jetzt nach Ablauf von Timer1 auf Start gesetzt >> (automationStartTimer wird nicht mehr benötigt) > > Kurze Frage zum Programm: > d.h. ich setze kein MOWTODAY ab? sprich nach Timer1 Stop Zeit (z.B. > 10:10) wird ein MOWTODAY abgesetzt? Die Zeit aus meiner Beschreibung von 10:00-10:10 nutze ich, um den Mäher regelmäßig aufzuwecken. Beim Hochlauf des ESP wird an den Mäher der Befehl STOP gesendet, damit der Mäher nicht losfährt - beim Ende von Timer1 (10:10 in meinem Fall) wird der Befehl START an den Mäher gesendet. Grund: Bei mir hatte ich das Verhalten, dass der Mäher am nächsten Tag nicht wieder aufgewacht ist, wenn er am Vortag im Zustand STOP in Sleep gegangen ist - daher setze ich den Befehl START nach dem Ende von Timer1. Wenn von der Hausautomatisierung kein MOWTODAY abgesetzt wurde, sind die Starttage von Timer2 leer, d.h. er soll dann erst wieder am nächsten Tag starten. (MOWTODAY wird NICHT vom Mäher selbst gesetzt). >> - Wenn die Endzeit von Timer2 erreicht ist, werden über das Kommando >> "ABORTDAYS" alle Arbeitstage aus Timer2 gelöscht > > Das führte glaube bei mir dazu dass er dann zur Endzeit stehen bleibt > und nicht in die Ladestation fährt. Ggf. muss ein HOME abgesetzt werden? Wie ist dann das Verhalten? Er bleibt einfach stehen und meldet sich erst am nächsten Tag zu Timer1 wieder? Wie ist denn der Zustand (Status und letzte Logeinträge) in diesem Modus? Habe in meinem Log nachgeschaut - irgendwie war der Mäher immer am Laden, wenn der Befehl abgesetzt wurde... Werde das bei mir nochmal testen.
Habe es heute erneut probiert und es ist so wie ich beschrieben habe, er bleibt stehen und im LOG steht: AUTOMATION removed all workingdays of Timer2 Status kam das hier: Invalid response (STATUS 02-12-01-01-9F-03 -> FE-00-00-86-03) Kannst Du evtl. in das Programm einen Timer setzen? Der Mäher benötigt ca. 2 Min. um in die Ladestation zu fahren. Ich müsste das ABORTDAYS 2 Minuten später senden dann würde es klappen. Oder in Abhängigkeit dass er nach dem Timer den Stempel "Charging" gibt.
Angehängte Dateien:
-

IMG_20190817_153423.jpg
240 KB
Hi, ich habe einen Sileno City. Habe mir jetzt den ganzen Thread durchgelesen. Im Prinzip ist es genau das, was ich suche :). Ich habe jedoch noch zwei Fragen: - Hat das schon jemand mit dem Sileno City probiert? Das Problem scheint der nicht vorhandene AUX1-Stecker auf dem Mainboard zu sein. Die Jungs von Robonect lösen das, für mein Verständnis, über eine Adapterplatine. Weiß da jemand mehr? - Kann man mit den Radmotor-Testen Befehl den Mäher quasi steuern? Danke & Gruß
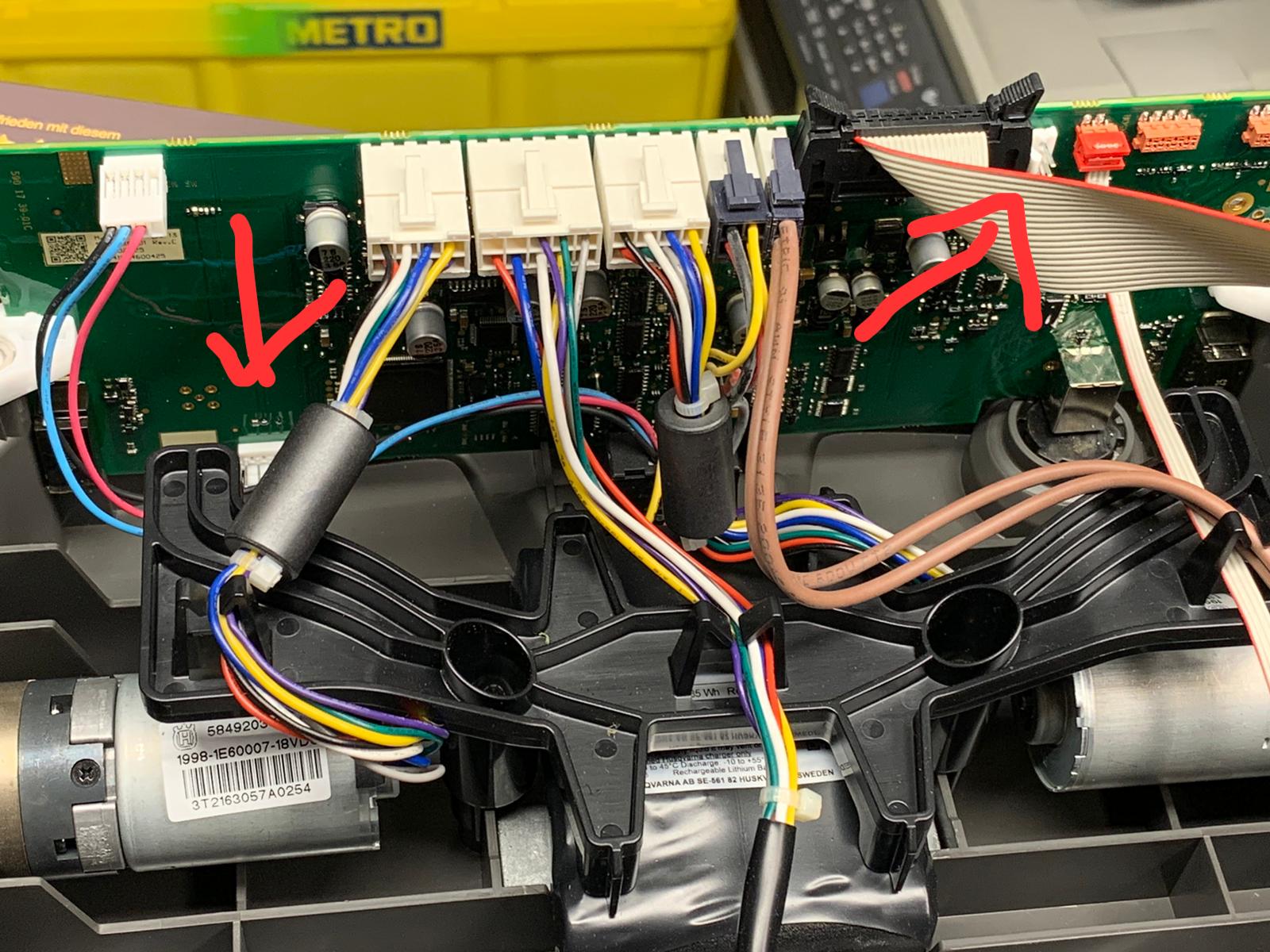
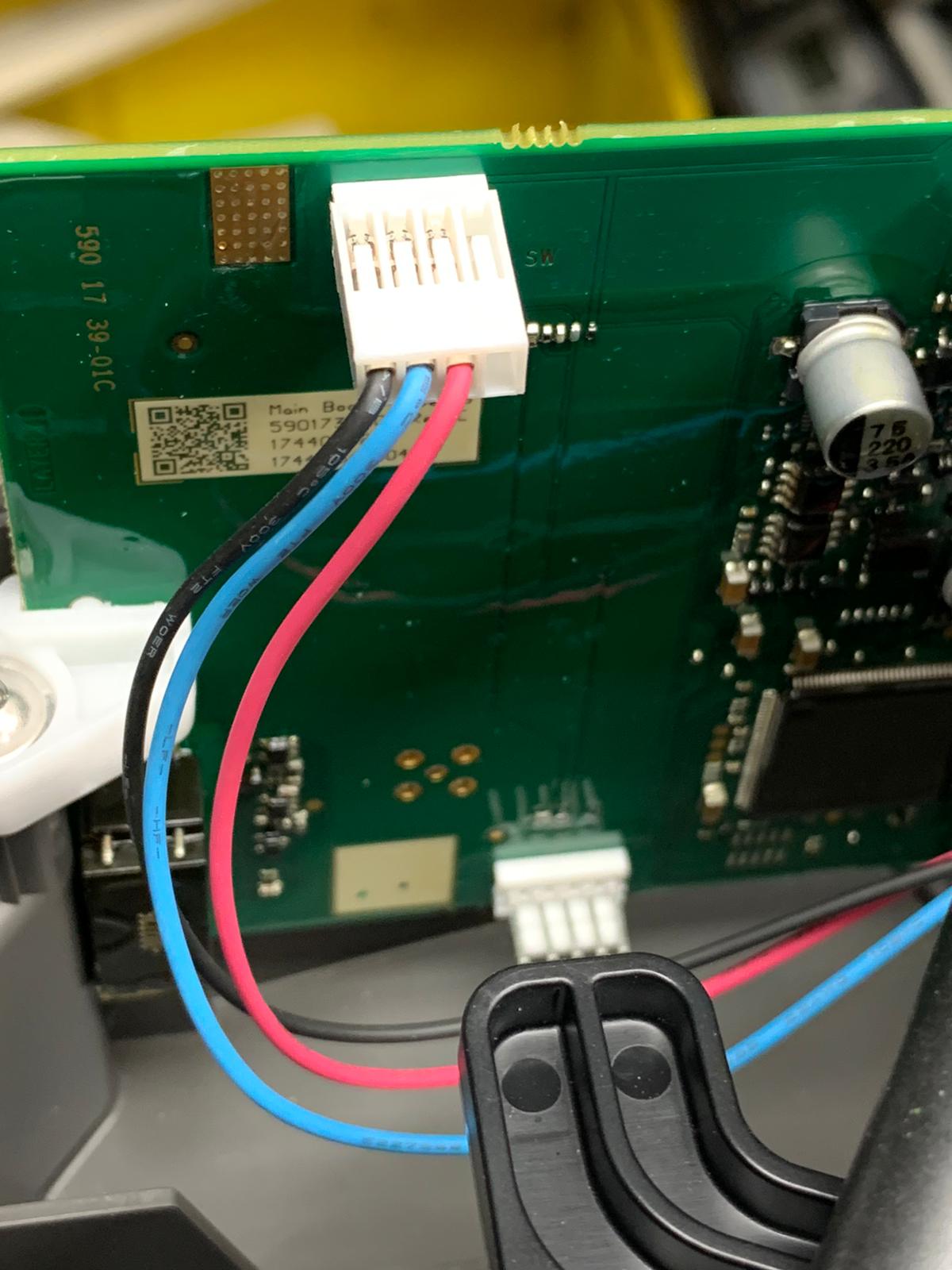
Hallo, Guck mal auf der displayplatine. Das ist neben dem Folientastatur Stecker der AUX Anschluss
Angehängte Dateien:
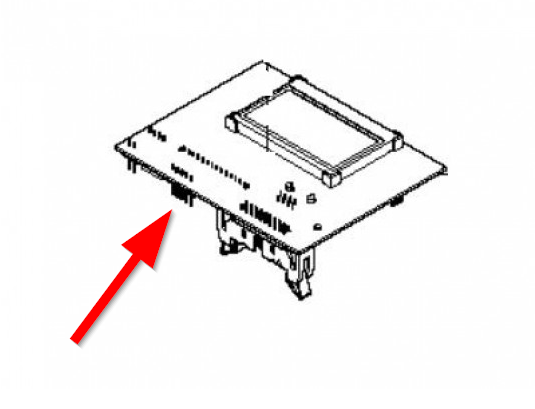
Hi Follow2000, Danke für Deine Antwort. Also befindet sich der AUX1 da, wo ich den Pfeil hingesetzt habe? Ich habe den Mäher bis jetzt nicht geöffnet, da ich heute Abend erst auf den Thread gestoßen bin. Deswegen bin ich erstmal alles "im Kopf" durchgegangen. Thx
Genau Auf der Platine, Ist der normale Rote AUX Stecker. Graue Abdeckung einfach abziehen. Abdeckung von dem Mäher einfach mit 2 Kuchengabeln lösen. Sind so 2 rastnasen jeweils. Und dann die Schrauben lösen. Es gibt keine Siegel.
Rob R. schrieb: > Habe es heute erneut probiert und es ist so wie ich beschrieben > habe, > er bleibt stehen und im LOG steht: AUTOMATION removed all workingdays of > Timer2 > > Status kam das hier: Invalid response (STATUS 02-12-01-01-9F-03 -> > FE-00-00-86-03) > > Kannst Du evtl. in das Programm einen Timer setzen? > Der Mäher benötigt ca. 2 Min. um in die Ladestation zu fahren. Ich > müsste das ABORTDAYS 2 Minuten später senden dann würde es klappen. > > Oder in Abhängigkeit dass er nach dem Timer den Stempel "Charging" gibt. Ich habe das Programm entsprechend angepasst, sodass der ESP nur noch im Status "charging" automatisch die Tage entfernt: https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/blob/develop/Wall-E_ESP8266_automower.ino Danke für den Hinweis!
Danke @Follow2000. Das Problem scheint immer noch zu sein, dass der Mäher nicht aus dem Standby aufgeweckt werden kann, weil niemand das Kommando weiß, richtig? Wie wollen wir die Suche nach dem Kommando gestalten? Gibt es da schon einen Plan? Sind wir überhaupt sicher, dass das über AUX1 geht? Meine Idee wäre es mal die Firmware von Robonect aus Versehen im Disassembler zu öffnen. Vielleicht findet man so das Kommando. Ich will hier nicht aufrufen, dass zu tun, das könnte verboten sein. Jedoch kann ich mir vorstellen, dass man damit einen Schritt weiter kommt. Oder vielleicht einfach die Jungs von Robonect fragen? Eine andere Möglichkeit wäre es sich in den seriellen Port der MMI Schnittstelle zu klemmen und die Kommandos zu loggen. So eine Art Man in the middle? Grüße
Angehängte Dateien:
-

status.PNG
5,4 KB
Hallo zusammen Danke vielmals für das Projekt. Ich habe heute den WEMOS D1 mini eingebaut in meinen Gardena R40Li. Ich kann über das Webinterface die Modus (Auto/Man/Home) setzen, aber erhalte keine Antworten des Mähers (Bsp Batterie Informationen, Zeit, etc). Da ich der Annahme war, dass es etwas mit dem RX Pin des Wemos (oder Verbindung Stecker-Flachbandkabel-Wemos) zu tun hat, habe ich das ganze nochmals eusgebaut und die einzelnen Pins einer Durchgangsprüfung unterzogen. Ebenso auch den Stecker etwas nachgepresst, soweit so gut aber ich erhalte nach wie vor keine Antworten des Mähers, die Modus stellen geht aber.... Wifi Signalstärke und SSID werden auf der Weboberfläche angezeigt... Ich benutze die neuste Version des Sketch, V.1.17, seit heute auch V.1.18. Kann mir jemand helfen das Problem zu lösen? Danke und viele Grüsse Daniel
@duesentrieb2168: Ich probiere es heute mit der Version 1.18 Danke für die Anpassung :) Ich habe noch einen seltsamen Fehler: Ich habe von Version 1.17 auf Version 1.18 via OTA geupdatet. Im Anschluss konnte ich den ESP nicht mehr erreichen. Er hatte dann von sich aus immer eine Wifi AP erstellt ESP-...ChipID..., aber keine Wifi Verbindung zu meinen Router mehr möglich. Ich habe dann meine alte Version 1.17 dagegen gestellt und in der Version hatte ich die Zeilen des "MQTT Client" auskommentiert. Habe die Platine dann ausgebaut und die Verison 1.18 aufgespielt und wieder eingebaut. Dann konnte ich ebenfalls keine Verbindung herstellen. Am PC angeschlossen funktionierte er aber. Dann in Version 1.18 wieder den MQTT Client auskommentiert aufgespielt eingebaut und schwups funktioniert wieder. Meine Vermutung: Die 3,3 V Boardspannung genügen nicht für den Aufbau des MQTT Servers. Er benötigt die 5 V. Wie gesagt nur eine Vermutung.
Angehängte Dateien:
-

Wemos-AUX.png
81 KB
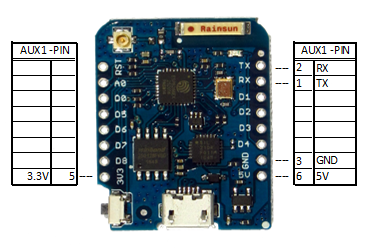
@Daniel E. Hast Du die Pins richtig verbunden? Es kommt anscheinend ja gar keine Rückmeldung.
Danke. 3v habe ich nicht verbunden. Ist das nötig? LG Daniel E.
Rob R. schrieb: > Meine Vermutung: > Die 3,3 V Boardspannung genügen nicht für den Aufbau des MQTT Servers. > Er benötigt die 5 V. > Wie gesagt nur eine Vermutung. Bzgl. MQTT-Server kann ich gar keine Rückmeldung geben, da ich den nie genutzt habe (von Anfang an deaktiviert). Da müssten andere Nutzer unterstützen, die das im Einsatz haben (Nosti, Markus, Nils).
Daniel E. schrieb: > Danke. 3v habe ich nicht verbunden. Ist das nötig? > LG Daniel E. Eigentlich nicht. Power hast Du ja, sonst würdest Du ihn im Wlan nicht sehen. @All Wer ist daran interessiert eine Lösung für die Stanby-Problematik zu entwickeln?
Felix schrieb: > @All > Wer ist daran interessiert eine Lösung für die Stanby-Problematik zu > entwickeln? Meines Wissens wird das Robonect Modul auch in die MMI-Schnittstelle zwischengeschaltet und löst dort über das Triggern der STOP-Taste ein Aufwecken aus (inklusive Piepen laut folgendem Beitrag): https://www.heise.de/forum/c-t/Kommentare-zu-c-t-Artikeln/Maehroboter-von-Husqvarna-und-Gardena-ins-Netz-holen/Tolles-Modul-aber-noch-Verbesserungsbedarf/posting-34412471/show/ Entsprechende Nachforschungen haben Sigi B. und Follow2000 auch schon dokumentiert: Beitrag "Re: Automower G3 mit USB Diagnoseport fernsteuern?" Beitrag "Re: Automower G3 mit USB Diagnoseport fernsteuern?" Ich habe mich gar nicht mit der MMI-Schnittstelle beschäftigt und finde wohl auch in den nächsten Monaten keine Zeit dafür.
Felix schrieb im Beitrag #6303587 > @All > Wer ist daran interessiert eine Lösung für die Stanby-Problematik zu > entwickeln? Die Batteriespannung ist ja immer da. 18V damit kriegt man den ESP in den Dauerbetrieb. Die Stoptaste ist doch einfach nur ein Taster/ Schalter. Den kann man mit einem Digital Output vom ESP ausführen lassen kann und dann unterhalb der Deepstandyzeit halten <15 Min muss... Das ist doch die Lösung? Ich persönlich möchte keinen Dauerbetrieb daher finde ich die Lösung in der Version 1.18 optimal, zumal sie in jegliche Automation eingefügt werden kann.
Angehängte Dateien:
-

robonect_mmi_aux.png
680 KB -

AUX_Pinout.png
27 KB
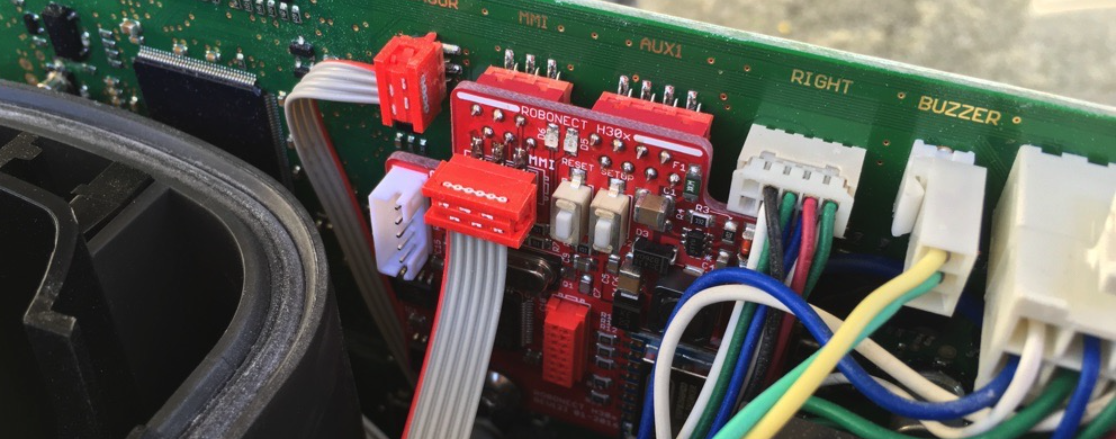
@Daniel D. Danke für die Links. In einer früheren Version (H30x) war die Platine noch direkt mit beiden Ports verbunden. Das bestätigt Deine Aussage. Das der MMI durchgeschleift wird, sieht man sogar auf dem Bild. @Rob R. Die 18 V liegen zwar an, aber soweit ich das verstanden habe, werden auch die im Standby abgeschalten. Jedoch hat Chris P. dazu geschrieben: Chris P. schrieb: > Man könnte da z.B. die Akkuspannung am Pin 7 runterregeln. Dann > verbraucht der zwar auch beim rumstehen Strom, kann aber durch H-Pegel > an TX dem Mäher aktivieren. Ist das des Rätsel Lösung?
Es hat mir keine Ruhe gelassen, dass ich keine Rückmeldung von meinem R40Li erhalten habe und deshalb mal den Wemos getauscht und die Kabel (Pins) neu verkabelt und gelötet. Das Problem bleibt bestehen > Kommandos können gesendet werden, aber keine Rückmeldungen und Informationen des R40Li. Ich vermute mal, dass meine Version des R40Li zu alt ist und die Rückmeldung noch nicht auf der AUX Schnittstelle ankommt, anders kann ich mir das nicht erklären. Ich habe nun auch noch die 3.3V ohne die 5V getetstet am Wemos, das Problem bleibt bestehen. Hat einer von euch ähnliche Erfahrungen gemacht oder einen Tip? LG Daniel E.
Hallo Zusammen Ich habe ähnliche probleme und auch einen alten RI-40LI und ein WEMOS im 3 Volt Betrieb. Die Werte kommen am Webfrontend an, aber ich bekomme beispielsweise keine Timer gesetzt oder kann kann Kommandos absetzen. In der Version 1.6 lief es. Habe jetzt die neuste Version drauf geladen. Was er auch macht, wenn ich den Mäher danach über Taste am Mäher manuel starte, dann fährt der Mäher ohne zu mähen 10 Meter weiter und stoppt einfach. Man bekommt den Mäher überhaupt nicht mehr gestartet. Ich würde erwarten, dass man ihn zumindest weiterhin auch manuel bedienen kann. Irgendwas noch nicht ganz ausgereift. Markus
MMI hat nach meinen Recherchen +3,3V, GND, STOP, RX, TX. Leitung Nr. 6 ist nicht bestückt. Vorteil von vom Zugriff auf die MMI ist, dass man die Kommunikation mitlesen kann. So kann man schnell neue Kommandos finden und implementieren.
Felix schrieb: > @Rob R. > Die 18 V liegen zwar an, aber soweit ich das verstanden habe, werden > auch die im Standby abgeschalten. Jedoch hat Chris P. dazu geschrieben: > > Chris P. schrieb: >> Man könnte da z.B. die Akkuspannung am Pin 7 runterregeln. Dann >> verbraucht der zwar auch beim rumstehen Strom, kann aber durch H-Pegel >> an TX dem Mäher aktivieren. > > Ist das des Rätsel Lösung? Die Idee war ja das man per Software zyklisch im 10-15 Min. Intervall ein STOP und dann ein AUTO setzt.
Daniel E. schrieb: > Es hat mir keine Ruhe gelassen, dass ich keine Rückmeldung von meinem > R40Li erhalten habe und deshalb mal den Wemos getauscht und die Kabel > (Pins) neu verkabelt und gelötet. Das Problem bleibt bestehen > > Kommandos können gesendet werden, aber keine Rückmeldungen und > Informationen des R40Li. Ich vermute mal, dass meine Version des R40Li > zu alt ist und die Rückmeldung noch nicht auf der AUX Schnittstelle > ankommt, anders kann ich mir das nicht erklären. > > Ich habe nun auch noch die 3.3V ohne die 5V getetstet am Wemos, das > Problem bleibt bestehen. Hat einer von euch ähnliche Erfahrungen gemacht > oder einen Tip? > LG Daniel E. Probier es mal indem du nur das nötigste aufspielst, z.B. die MQTT Sachen auskommentierst. Ein Gardena Software Update für den R40Li wäre mir neu und wird definitiv nicht benötigt. geht auch nur wenn den in den Gardena Service gibst.
Markus S. schrieb: > Hallo Zusammen > > Ich habe ähnliche probleme und auch einen alten RI-40LI und ein WEMOS im > 3 Volt Betrieb. > Die Werte kommen am Webfrontend an, aber ich bekomme beispielsweise > keine Timer gesetzt oder kann kann Kommandos absetzen. > In der Version 1.6 lief es. Habe jetzt die neuste Version drauf geladen. > Was er auch macht, wenn ich den Mäher danach über Taste am Mäher manuel > starte, dann fährt der Mäher ohne zu mähen 10 Meter weiter und stoppt > einfach. Man bekommt den Mäher überhaupt nicht mehr gestartet. > > Ich würde erwarten, dass man ihn zumindest weiterhin auch manuel > bedienen kann. > > Irgendwas noch nicht ganz ausgereift. > > Markus Manuelle Bedienung funktioniert nach wie vor, das habe ich gestern getestet. Die Daten im Webfrontend kommen je nachdem welchen Browser du verwendest zeitverzögert, weil der Webbrowser-Cache Probleme macht. Evtl. ist dei WLAN Stärke nicht so gut, bei werten um die -95 hatte ich ähnliches.
Rob R. schrieb: > Probier es mal indem du nur das nötigste aufspielst, z.B. die MQTT > Sachen auskommentierst. > Ein Gardena Software Update für den R40Li wäre mir neu und wird > definitiv nicht benötigt. geht auch nur wenn den in den Gardena Service > gibst. Das Auskommentieren der Zeilen "#define WITH_AUTOMATION" (Zeile 57) und "#define WITH_MQTT" (Zeile 63) sollte reichen - dann werden die Funktionen weder im setup() noch im loop() aufgerufen.
Markus S. schrieb: > Die Werte kommen am Webfrontend an, aber ich bekomme beispielsweise > keine Timer gesetzt oder kann kann Kommandos absetzen. > In der Version 1.6 lief es. Habe jetzt die neuste Version drauf geladen. > Was er auch macht, wenn ich den Mäher danach über Taste am Mäher manuel > starte, dann fährt der Mäher ohne zu mähen 10 Meter weiter und stoppt > einfach. Man bekommt den Mäher überhaupt nicht mehr gestartet. Was wird denn im Log angezeigt (ganz unten auf der Seite http://IP-Adresse/web)? Ich habe hinterlegt, dass bei Befehlen von der Automatisierung auch immer ein Log-Eintrag erstellt wird um eventuelles Fehlverhalten nachvollziehen zu können. Gruß
Rob R. schrieb: > Probier es mal indem du nur das nötigste aufspielst, z.B. die MQTT > Sachen auskommentierst. > Ein Gardena Software Update für den R40Li wäre mir neu und wird > definitiv nicht benötigt. geht auch nur wenn den in den Gardena Service > gibst. Danke für eure Hilfe. Ich habe die Automatisation und MQTT auskommentiert, kompiliert und via OTA geflasht. Leider bleibt das Problem bestehen > Ich erhalte keine Informationen des R40Li. Nur das setzen der 3 Modus (Auto/Man/Home) geht.... Nochmals jemand einen Tip? Danke und viele Grüsse Daniel E.
Guten Morgen, ich habe jetzt mein Kabel auf 5cm eingekürzt und einen D1 mini Anstatt des NodeMCU verbaut, aber leider erhalte ich noch immer kein Feedback vom AM310. Weder auf AUX1 noch auf AUX2, mach ich noch irgendwas falsch. Spielt es für das Feedback eine Rolle das der Mower offen ist wenn ich die Daten auslese? Gibt es eine Firmware in der die AUX Ports (RX/TX) nicht mehr versorgt werden? Liebe Grüße Chris
@Christian & Daniel Einen USB auf TTL Adapter habt ihr zufällig nicht rumfahren? Dann könnte man mal den Rechner auf den Rasenmäher an den Rechner und den ESP an den Rechner hängen und sehen, ob der Mäher auf die Kommandos reagiert bzw. ob die Kommandos kommen.
Guten Morgen Felix, ich habe so einen FTDI Adapter da um meine ESPs zu flashen. Kannst du mir sagen wie ich die Kommandos abfangen kann? Mit dem Serial Monitor der Arduini IDE oder gibt's da was Anderes?
Moin, nur kurz zu den Problematiken, dass keine Antworten vom Mäher kommen. Über die Stolpersteine, über die ich gefallen bin, waren, dass der Mäher nur antwortet, wenn er entweder gerade mäht oder aufläd. Dann scheint das Flachbandkabel bzw. die Übertragung wohl störanfällig zu sein. Timo hatte mir da den Tipp gegeben, das Kabel möglichst kurz zu halten und den Bereich der Motoren zu meiden. Oben im Thread gibt es ein paar Bilder, vielleicht guckt ihr euch das nochmal an. Beitrag "Re: Automower G3 mit USB Diagnoseport fernsteuern?" Hoffe das hilft dem einen oder anderen vielleicht weiter. Gruß Nils
Hallo Nils, vielen Dank für die Hinweise, sobald ich zuhause bin werde ich mal schauen ob ich Antworten bekomme wenn er mäht bzw. lädt. Das Kabel habe ich durchgemessen und es ist mittlerweile nur noch 5cm lang, das kanns kaum noch sein. Ich sage Bescheid LG Chris
Nils B. schrieb: > Moin, > > nur kurz zu den Problematiken, dass keine Antworten vom Mäher kommen. > Über die Stolpersteine, über die ich gefallen bin, waren, dass der Mäher > nur antwortet, wenn er entweder gerade mäht oder aufläd. > > Hoffe das hilft dem einen oder anderen vielleicht weiter. > > Gruß Nils Danke Nils für die Info. Ich habe bis jetzt immer im Keller getestet und gedacht, dass die Informationen kommen, sobald das Modul online ist.... Ich werde in diesem Fall heute Abend nochmals testen in der Wiese und berichten. LG Daniel E.
Hi Chris, ich hatte mein Kabel nachher auch mal Testweise nur ein paar cm lang, was aber leider dann auch nicht besser war, vermutlich weil das Modul dann quasi direkt neben einem der Motoren positioniert war. Die scheinen sich auch nicht zu mögen. Am Ende ist mein Kabel jetzt ca. 15-20cm lang und das Modul und Kabel möglichst weit weg von den Motoren.
Hallo zusammen Mein Mäher mäht nun seit ca 40min, nach wie vor erhalte ich keine Informationen von ihm, weder Batterie noch sonst was. Kommandos kann ich senden, auch Start und Stop funktioniert. Mein Flachbandkabel ist ca 12cm lang und ich habe nochmals alles kontrolliert, die Kabel durchgemessen und die Pins nachglötet beim ESP. Hmmm, ich glaube bald, dass meine Platine im Mäher ein Problem hat mit dem RX... Aber das wichtigste ist, dass ich Kommandos schicken kann. Falls sich in der Ladestation was ändern sollte, resp er auf einmal Informationen senden würde, gebe ich nochmals Bescheid... Danke trotzdem allen für die wertvollen Tips. LG Daniel E.
Hallo Nils, leider bin ich keinen Schritt weiter. Habe das Kabel jetzt von 40 in 5 cm bis 12cm runtergekürzt, nix keine Antworten oder Reaktionen. Nachdem bei Daniel E. wenigstens Signale raus gingen, hatte ich erneut Hoffnung, das es "nur" der Standort im Keller war. Aber leider nein weder RX noch TX. Die nächste Aktion wird mal den FTDI an RX / TX anzuschließen und mal mitzulauschen. Gibts da n gutes Programm mit dem ich das machen kann? Hast du denn auch das MainBoard mit 2 AUX Anschlüssen? Welchen nimmst du? LG Chris
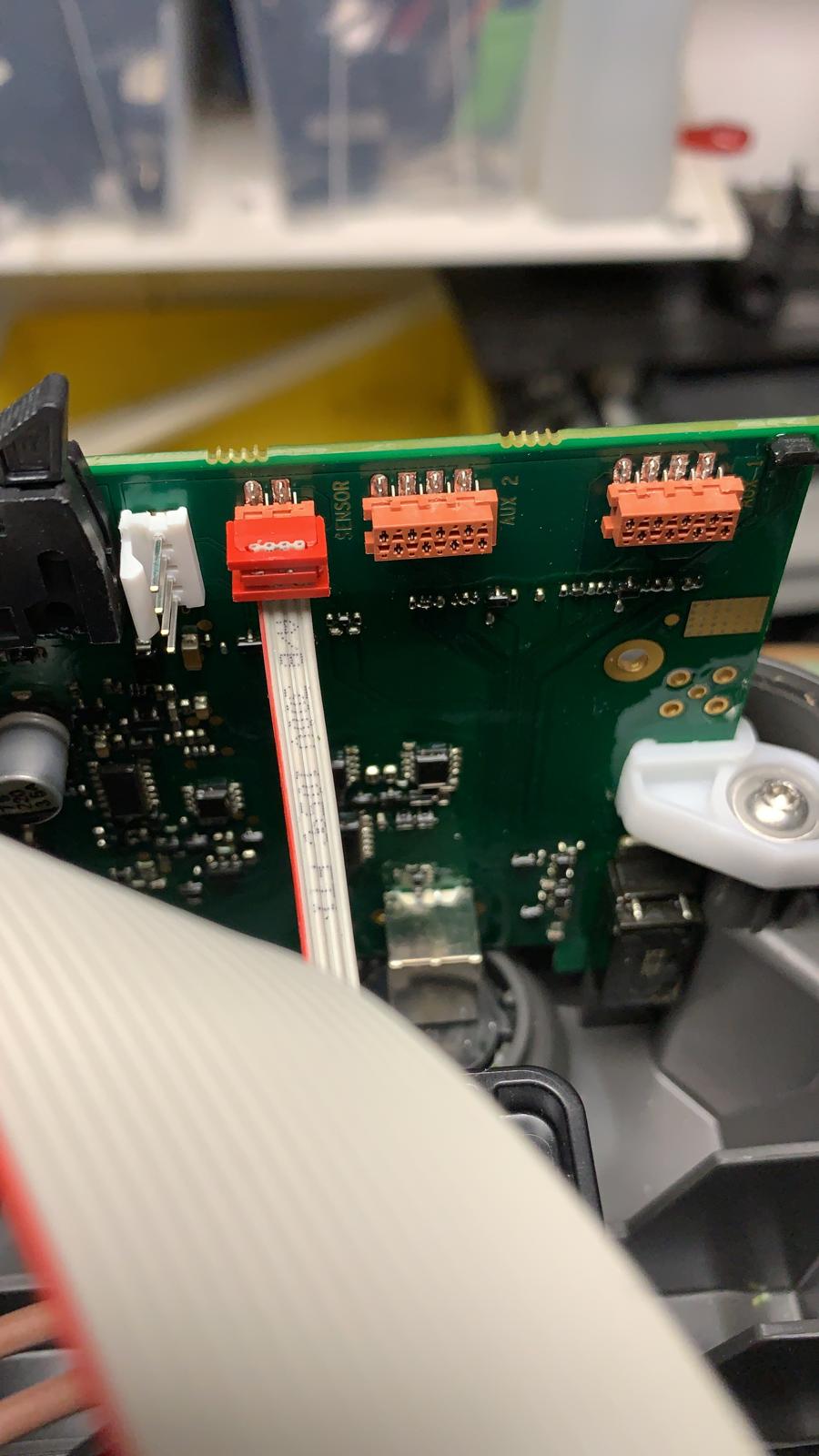
Hat denn jemand schon mal die weißen Ports auf dem Mainboard gecheckt? Sind das eventuell auch nutzbare Ports? So richtig trau ich mich nicht die zu erforschen :) . Grüße
Angehängte Dateien:
-

PHOTO-2020-06-18-17-11-01.jpg
280 KB -

PHOTO-2020-06-18-17-11-09.jpg
200 KB -

PHOTO-2020-06-18-17-11-24.jpg
150 KB -

PHOTO-2020-06-18-17-12-40.jpg
110 KB -

PHOTO-2020-06-18-17-12-41.jpg
110 KB

Bitte sehr! Das mach ich gern... LG Chris
Christian M. schrieb: > Bitte sehr! Das mach ich gern... > > LG Chris oh no... Jetzt sehe ich auf deinem Bild 4, dass ich meinen WEMOS am AUX2 statt am AUX1 angeschlossen habe... Ich habe AUX1 nicht gesehen, da ich nur den Deckel des R40Li gelöst habe und dann durch das Loch wo das Display-Kabel durch kommt den Wemos angeschlossen und verstaut habe...Werde das am Wochenende richtig stellen. Spannend trotzdem, dass am AUX2 senden geht, aber nicht empfangen... LG Daniel E.
Daniel E. schrieb: > Christian M. schrieb: >> Bitte sehr! Das mach ich gern... >> >> LG Chris > oh no... Jetzt sehe ich auf deinem Bild 4, dass ich meinen WEMOS am AUX2 > statt am AUX1 angeschlossen habe... Ich habe AUX1 nicht gesehen, da ich > nur den Deckel des R40Li gelöst habe und dann durch das Loch wo das > Display-Kabel durch kommt den Wemos angeschlossen und verstaut > habe...Werde das am Wochenende richtig stellen. Spannend trotzdem, dass > am AUX2 senden geht, aber nicht empfangen... > LG Daniel E. Öhm meiner ist ein Automower310 von Husquarna... ich weiß nicht ob die die selben Innereien haben. :) Nicht dass du dich da vertust. LG
Bild PHOTO-2020-06-18-17-11-01.jpg beim Pfeil auf der rechten Seite, das ist das HMI-Leiterkabel. Das geht zum Display hoch, richtig? An dessen Pinbelegung wäre ich sehr interessiert. Da müsste AUX(5?) und der MMI drauf liegen. Der Rest der Pins sollte nicht geschalten sein. Irgendwo liegen da also wieder die 18 V, 3.3 V, 5 V, RX und TX usw. an. Vielleicht hast Du ja Zeit und Lust, das Rätsel zu lösen.
Felix schrieb: > Bild PHOTO-2020-06-18-17-11-01.jpg beim Pfeil auf der rechten Seite, das > ist das HMI-Leiterkabel. Das geht zum Display hoch, richtig? > > An dessen Pinbelegung wäre ich sehr interessiert. Da müsste AUX(5?) und > der MMI drauf liegen. Der Rest der Pins sollte nicht geschalten sein. > Irgendwo liegen da also wieder die 18 V, 3.3 V, 5 V, RX und TX usw. an. > > Vielleicht hast Du ja Zeit und Lust, das Rätsel zu lösen. Lust ja Zeit ja, aber wenn ich was kaputt mache. Hab bissle Bange da mitm Multimeter rumzustochern. ? Mal sehen wie weit ich mich da morgen ran traue. LG
Christian M. schrieb: > Lust ja Zeit ja, aber wenn ich was kaputt mache. Hab bissle Bange da > mitm Multimeter rumzustochern. > > ? > > Mal sehen wie weit ich mich da morgen ran traue. > > LG Hats geklappt?
Felix schrieb: > Christian M. schrieb: >> Lust ja Zeit ja, aber wenn ich was kaputt mache. Hab bissle Bange da >> mitm Multimeter rumzustochern. >> >> ? >> >> Mal sehen wie weit ich mich da morgen ran traue. >> >> LG > > Hats geklappt? Hab es am WE nicht geschafft, Familie hat spontan nen Besuch eingeschoben. Setz mich nächste Woche dran, brauch ja bissle Ruhe dazu. LG
Weiss jemand, wie ich den Akkustand abfragen kann? Das ist ja auf Seite 37 hier (https://docs.google.com/viewer?url=http%3A%2F%2Fwww.mikrocontroller.net%2Fattachment%2F278555%2FRobomower_V0.8.pdf) beschrieben. Mich interessiert eigentlich nur die Betriebsspannung und evtl. noch bei der Gelegenheit die Temperatur. Das Kommando ist schon klar. Aber wie interpretiere ich die Antwort? Ich bin bisher - sehr erfolgreich - nach dieser Anleitung (https://www.loxwiki.eu/pages/viewpage.action?pageId=48137811) vorgegangen und alles funktioniert auch für einen relativen Laien ganz gut. Aber super wäre es doch, wenn auch der Akku-Status ausgelesen werden kann, damit der Mäher rechtzeitig in die Ladestation gerufen wird. Bin gespannt, ob jemand weiter weiss...
Tobias L. schrieb: > Weiss jemand, wie ich den Akkustand abfragen kann? In dem von dir verlinkten Robomover_V0.8 ist es schon hinterlegt, wie die Antwort auszuwerten ist: Byte 6 und 7 von HEX nach DEC wandeln und du hast die Akkukapazität. Die Auswertung und Anzeige ist im folgenden Projekt für den ESP schon integriert: https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/blob/develop/Wall-E_ESP8266_automower.ino Wenn du eine eigene Implementierung erstellen willst, kannst du als Anregung in dem oben verlinkten Code nach "GetBattery" suchen.
Hallo zusammen, ich beschäftige mich auch seit einiger Zeit mit diesem Thema und folgendes ist mit noch zusätzlich aufgefallen. Status: 02 12 01 01 9F 03 In der Antwort versteckt sich im Byte21 der Ladestand der Batterie in % z.Bsp: 25 -> 37% Batterie Status: 02 14 01 01 4E 03 Hier ist ein ein Überlaufbyte für die Temperatur in Byte 11 versteckt damit auch Temperaturen über 25.5 angezeit werden können. somit: Temp = byte11 * 25.5 + byte10/10 z.Bsp: byte11=01 Byte10=30 >> Temp. = 30,4°C LG
Hallo Zusammen, erstmal ein großes Lob an die Entwickler der Software. :-) Ihr habt da eine tolle Arbeit verbracht. Allerdings bräuchte ich bei der Implementierung mal eure Hilfe. Ich habe mir einen Wemos D1 mini Pro gekauft und die 1.18er Version per Arduino IDE installiert/hochgeladen. Danach strahlt der Wemos ein WLAN im AP-Modus aus und verbindet sich auch mit meinem WLAN. Die Webseite ist ebenfalls per http://IP-Adresse/web aufrufbar, dies allerdings nur für ca. 60 Sekunden. Danach kann man den Wemos zwar noch pingen aber die Webseiten und Befehle liefern keine Rückmeldung mehr. Verbauen möchte ich Ihn in einen Gardena R38Li (R40Li). Habt ihr eine Idee, woran es liegen kann? Danke und viele Grüße Ben
jackmaniels schrieb: > Hallo zusammen, > ich beschäftige mich auch seit einiger Zeit mit diesem Thema und > folgendes ist mit noch zusätzlich aufgefallen. > > Status: 02 12 01 01 9F 03 > In der Antwort versteckt sich im Byte21 der Ladestand der Batterie in % > z.Bsp: 25 -> 37% > > Batterie Status: 02 14 01 01 4E 03 > Hier ist ein ein Überlaufbyte für die Temperatur in Byte 11 versteckt > damit auch Temperaturen über 25.5 angezeit werden können. > somit: Temp = byte11 * 25.5 + byte10/10 > z.Bsp: byte11=01 Byte10=30 >> Temp. = 30,4°C > > LG Danke für den Hinweis hab das mal zum Testen in meine Loxone Logik eingebaut. Die Angabe ist fast identisch, Abweichung liegt bei 0,22 %.
jackmaniels schrieb: > Hallo zusammen, > ich beschäftige mich auch seit einiger Zeit mit diesem Thema und > folgendes ist mit noch zusätzlich aufgefallen. Super - werd ich die Tage mit integrieren. Danke! :-)
Benjamin L. schrieb: > Danach kann man den Wemos zwar noch pingen aber die > Webseiten und Befehle liefern keine Rückmeldung mehr. > > Verbauen möchte ich Ihn in einen Gardena R38Li (R40Li). > > Habt ihr eine Idee, woran es liegen kann? Probier mal nur das Nötigste zu aktivieren (Automatisierung und MQTT deaktivieren) - siehe Tipps aus folgendem Beitrag: Beitrag "Re: Automower G3 mit USB Diagnoseport fernsteuern?" Gruß
Tobias L. schrieb: > Weiss jemand, wie ich den Akkustand abfragen kann? Das ist ja auf Seite > 37 hier > (https://docs.google.com/viewer?url=http%3A%2F%2Fwww.mikrocontroller.net%2Fattachment%2F278555%2FRobomower_V0.8.pdf) > beschrieben. Mich interessiert eigentlich nur die Betriebsspannung und > evtl. noch bei der Gelegenheit die Temperatur. Das Kommando ist schon > klar. Aber wie interpretiere ich die Antwort? Ich bin bisher - sehr > erfolgreich - nach dieser Anleitung > (https://www.loxwiki.eu/pages/viewpage.action?pageId=48137811) > vorgegangen und alles funktioniert auch für einen relativen Laien ganz > gut. Aber super wäre es doch, wenn auch der Akku-Status ausgelesen > werden kann, damit der Mäher rechtzeitig in die Ladestation gerufen > wird. Bin gespannt, ob jemand weiter weiss... Ich habe hierzu eine Datei geschrieben es aber nie veröffentlicht...Anbei die Komplette Version mit Batterie am Ende. Sehr umfangreich da man jedes einzelne Byte interpretieren muss. Aber funktioniert ;)
Daniel D. schrieb: > Benjamin L. schrieb: >> Danach kann man den Wemos zwar noch pingen aber die >> Webseiten und Befehle liefern keine Rückmeldung mehr. >> >> Verbauen möchte ich Ihn in einen Gardena R38Li (R40Li). >> >> Habt ihr eine Idee, woran es liegen kann? > > Probier mal nur das Nötigste zu aktivieren (Automatisierung und MQTT > deaktivieren) - siehe Tipps aus folgendem Beitrag: > Beitrag "Re: Automower G3 mit USB Diagnoseport fernsteuern?" > > Gruß Hallo Daniel, danke für die schnelle Antwort. Habe es gerade mal probiert und es scheint jetzt zu funktionieren. Morgen baue ich ihn dann in den Mäher an und gebe dann eine Rückmeldung. Danke und Grüße Ben
Rob R. schrieb: > jackmaniels schrieb: >> Status: 02 12 01 01 9F 03 >> In der Antwort versteckt sich im Byte21 der Ladestand der Batterie in % >> z.Bsp: 25 -> 37% > Danke für den Hinweis hab das mal zum Testen in meine Loxone Logik > eingebaut. Die Angabe ist fast identisch, Abweichung liegt bei 0,22 %. Hab das heute mal genauer getestet. Bei ca. 24% sucht der Mäher die Ladestation. Bei meiner Auswertung über jedes einzelne Batterie Byte sind wir dann plusminus bei 0%. Sprich die Abweichung von ca. 0,22% zieht sich bis nach unten und multipliziert sich logischerweise. Also wenn man das 21Byte nimmt sollte man die 24% als fast 0% interpretieren.
Habe die Anpassungen in gitlab eingecheckt (Version 1.19): - Fix bug (temperature >25,5C not shown) (Thanks to jackmaniels) - added battery charge in percent - added workinghours https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/blob/develop/Wall-E_ESP8266_automower.ino Die Arbeitsstunden des Mähers sind in Byte 19 und 20 des Mäherstatus enthalten und geben in Stunden die Gesamtmähzeit wieder. Wäre auch noch eine Ergänzung für das Robomower-Dokument... Wenn man sich den Mäherstatus nochmal genauer anschaut sind ein paar Bytes noch nicht entschlüsselt: Bytes 3,8,9,23,25,26,27,28 haben nach meiner Beobachtung durchgehend den Wert x00. Die folgenden Bytes haben teilweise Werte: Byte14 (hatte bei mir bislang die Werte x00 und x02) Byte22 (Während dem Mähen Wert x08, beim Laden x0A, parkend x0C - scheinbar statusgebunden) Byte24 (bislang Werte x50, x8D, x8E, xCE, xD8, xE1 - scheint etwas hochzuzählen) => Hat jemand Ideen, was für Informationen dahinter stecken? @Rob R.: Hatte den Mäher heute im manuellen Modus - er kam schon bis 0% runter. Beim Laden war er aber zwischenzeitlich auch bei bis zu 166% - als das Laden beendet war, ist er direkt auf 100% runter...
Daniel D. schrieb: > @Rob R.: Hatte den Mäher heute im manuellen Modus - er kam schon bis 0% > runter. Beim Laden war er aber zwischenzeitlich auch bei bis zu 166% - > als das Laden beendet war, ist er direkt auf 100% runter... :) das habe ich auch schon bemerkt, da ich den Mäher in der Nebenfläche auf MAN setze. Dann gilt das aus dem Werkstatthandbuch nur für Mode AUTO.... • Volt: Aktueller Spannungswert der Batterie. Ein Wert von etwa 21 V steht für eine vollständig aufgeladene Batterie. Ein Wert von ca. 18 V bedeutet, dass die Batterie entladen ist. • Ladestand: Zeigt den verbleibenden Batterieladestand an. Bei vollständig aufgeladener Batterie beträgt der Ladestand ca. 1200 mAh. Wenn der Ladestand auf etwa 300 mAh gesunken ist, kehrt der Mäher zur Ladestation zurück. Ich habe aus diesen Werten die Berechnung in meinem Dokument erstellt. Danke für das neue RELEASE !DAUMEN HOCH!
Benjamin L. schrieb: > Daniel D. schrieb: >> Benjamin L. schrieb: >>> Danach kann man den Wemos zwar noch pingen aber die >>> Webseiten und Befehle liefern keine Rückmeldung mehr. >>> >>> Verbauen möchte ich Ihn in einen Gardena R38Li (R40Li). >>> >>> Habt ihr eine Idee, woran es liegen kann? >> >> Probier mal nur das Nötigste zu aktivieren (Automatisierung und MQTT >> deaktivieren) - siehe Tipps aus folgendem Beitrag: >> Beitrag "Re: Automower G3 mit USB Diagnoseport fernsteuern?" >> >> Gruß > > Hallo Daniel, > > danke für die schnelle Antwort. Habe es gerade mal probiert und es > scheint jetzt zu funktionieren. > Morgen baue ich ihn dann in den Mäher an und gebe dann eine Rückmeldung. > > Danke und Grüße > Ben Hallo Daniel, jetzt hat es funktioniert :-)! Vielen Dank nochmal! Grüße Benjamin
Hallo Zusammen, Hat jemand einen Tip wie ihr die Antenne im Mäher platziert habt? Ich habe das Problem, dass ich draußen nicht überall WLAN habe bzw. der Empfang ist lausig. Ich habe ein Loch in den Mäher gebohrt für eine externe Antenne. Markus
Markus S. schrieb: > Hallo Zusammen, > Hat jemand einen Tip wie ihr die Antenne im Mäher platziert habt? > > Ich habe das Problem, dass ich draußen nicht überall WLAN habe bzw. der > Empfang ist lausig. > > Ich habe ein Loch in den Mäher gebohrt für eine externe Antenne. > > Markus Vielleicht stellt Du besser einen Repeater im Garten auf? Alternativ kannst Du es auch mit einer Antenne mit mehr Gewinn versuchen.
Christian M. schrieb: > > Hab es am WE nicht geschafft, Familie hat spontan nen Besuch > eingeschoben. Setz mich nächste Woche dran, brauch ja bissle Ruhe dazu. > > LG Bist wahrscheinlich immer noch nicht dazu gekommen, oder?
Felix schrieb: > Christian M. schrieb: >> >> Hab es am WE nicht geschafft, Familie hat spontan nen Besuch >> eingeschoben. Setz mich nächste Woche dran, brauch ja bissle Ruhe dazu. >> >> LG > > Bist wahrscheinlich immer noch nicht dazu gekommen, oder? Ja wir sind auf Arbeit wieder in den Normalbetrieb gegangen. Da muss der Rasenmäher erstmal hinten an. Aber ich bleibe dran. LG Chris
Das klingt ja nach einer easy Sache. Wie hast Du es genau gemacht?
Rob R. schrieb: > Danke für den Hinweis hab das mal zum Testen in meine Loxone Logik > eingebaut. Die Angabe ist fast identisch, Abweichung liegt bei 0,22 %. Das klingt ja nach einer easy Sache. Wie hast Du es genau gemacht?
Rob R. schrieb: > Ich habe hierzu eine Datei geschrieben es aber nie > veröffentlicht...Anbei die Komplette Version mit Batterie am Ende. Sehr > umfangreich da man jedes einzelne Byte interpretieren muss. Aber > funktioniert ;) Vielen Dank für diese tolle Anleitung.Respekt. Leider haben sich bei mir doch noch ein paar Fehler eingeschlichen, sodass es nicht funktioniert. Würdest du die Lox-Datei wieder teilen? Das wäre phantastisch.
Christian M. schrieb: > Felix schrieb: >> Christian M. schrieb: >>> >>> Hab es am WE nicht geschafft, Familie hat spontan nen Besuch >>> eingeschoben. Setz mich nächste Woche dran, brauch ja bissle Ruhe dazu. >>> >>> LG >> >> Bist wahrscheinlich immer noch nicht dazu gekommen, oder? > > Ja wir sind auf Arbeit wieder in den Normalbetrieb gegangen. Da muss der > Rasenmäher erstmal hinten an. Aber ich bleibe dran. > > LG Chris Hey Chris, hast wahrscheinlich immer noch nicht die Zeit gefunden oder? Grüße, Felix
Ich habe auch einen Sileno und wäre an der Mainboard-Schnittstelle interessiert. Wie findet man am besten heraus, was welcher Pin ist (Rx, Tx, GND etc)? Hat da jemand einen Tipp? Danke.
Nur die Leitungen nützen dir nix. Bei dem Sileno wird noch ein Hardwarehandshake gemacht. Die haben die Schnittstelle komplett überarbeitet. Hab’s auch erst selbst versucht. Aber nachdem ich mir das Mainboard zerschossen hab, hab ich die Experimente aufgegeben und mir nach dem Garantietausch Robonect eingebaut. Ich arbeite jetzt mit der offenen API und muss keine Angst mehr haben, dass es mir nochmal passiert. Keine Ahnung, was vorher falsch lief. Nach dem Starten kam im Display immer die Meldung „Gerät gesperrt!“. Auch nachdem ich alles wieder ausgebaut hatte.
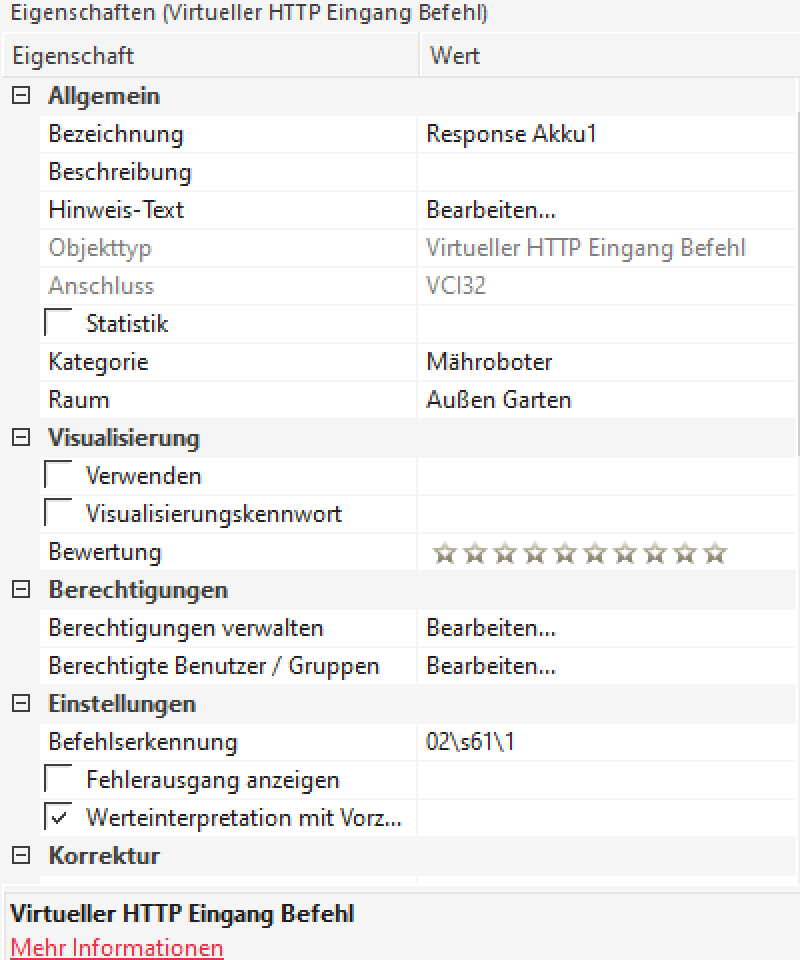
Daniel D. schrieb: > Tobias L. schrieb: >> Weiss jemand, wie ich den Akkustand abfragen kann? > > In dem von dir verlinkten Robomover_V0.8 ist es schon hinterlegt, wie > die Antwort auszuwerten ist: Byte 6 und 7 von HEX nach DEC wandeln und > du hast die Akkukapazität. > > Die Auswertung und Anzeige ist im folgenden Projekt für den ESP schon > integriert: > https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/blob/develop/Wall-E_ESP8266_automower.ino > > Wenn du eine eigene Implementierung erstellen willst, kannst du als > Anregung in dem oben verlinkten Code nach "GetBattery" suchen. Das klingt super-interessant. Ich habe nur keine Ahnung, wie ich das in die Loxone-Logik integrieren kann. Es müsste ja dieser Part ausgelesen werden. //Get battery charge in percent String byte21 = GetByteFromHexString(hexResponse, 21); byte21.toCharArray(ChrDummy, byte21.length() + 1); batterycharge = hex2int(ChrDummy, byte21.length()); Im Prinzip könnte man den Wert nach dieser Anleitung https://docs.google.com/viewer?url=http%3A%2F%2Fwww.mikrocontroller.net%2Fattachment%2F462758%2FHOW_TO_ESP8266_Maehroboter_Anbindung_V3_NEU.pdf genauso auslesen, wie den Status. Nur wie lautet die Befehlserkennung und wie der Wert interpretiert?
Karsten schrieb: > Nur die Leitungen nützen dir nix. Bei dem Sileno wird noch ein > Hardwarehandshake gemacht. Die haben die Schnittstelle komplett > überarbeitet. > Hab’s auch erst selbst versucht. Aber nachdem ich mir das Mainboard > zerschossen hab, hab ich die Experimente aufgegeben und mir nach dem > Garantietausch Robonect eingebaut. Ich arbeite jetzt mit der offenen API > und muss keine Angst mehr haben, dass es mir nochmal passiert. > > Keine Ahnung, was vorher falsch lief. Nach dem Starten kam im Display > immer die Meldung „Gerät gesperrt!“. Auch nachdem ich alles wieder > ausgebaut hatte. Weißt Du was Du genau gemacht hast, dass Du dir das Board zerschossen hast? Kannst Du etwas genaueres zum "Hardwarehandshake" sagen?
Tobias L. schrieb: > Im Prinzip könnte man den Wert nach dieser Anleitung > > https://docs.google.com/viewer?url=http%3A%2F%2Fwww.mikrocontroller.net%2Fattachment%2F462758%2FHOW_TO_ESP8266_Maehroboter_Anbindung_V3_NEU.pdf > > genauso auslesen, wie den Status. Nur wie lautet die Befehlserkennung > und wie der Wert interpretiert? Du liesst den Wert so aus: Byte21 (1.Stelle) Befehlskennung: 02\s61\1 Byte21 (2.Stelle) Befehlskennung: 02\s62\1 Dann Formelbaustein der dir das umwandelt (4 Bytes ASCII>HEX>DEZ) mit der Formel: (I1-48-SIGN(INT((I1-48)/10))*(I1-48)+SIGN(INT((I1-48)/10))*(I1-55))+(I2- 48-SIGN(INT((I2-48)/10))*(I2-48)+SIGN(INT((I2-48)/10))*(I2-55))*16 AI1 wird auf Byte21 (2.Stelle) AI2 wird auf Byte21 (1.Stelle) gesetzt. Dann einen Merker auf AQ der Formel setzen fertig.
Hallo, habe vor kurzen unseren eigentlich neuen Worx Mähroboter verkauft, da er für uns einfach nicht geeignet war und ich den Frontantrieb beim Gardena zumindest bei unseren gegebenheiten besser finde. Unter anderem aufgrund der tollen Arbeit hier habe ich mich für einen gebrauchten R40Li entschieden. Der hat gleich mal ein General Überholung inklusive neu fetten des Getriebes,... erhalten. Da ich noch paar ESP12F rum liegen hatte wurde da natürlich auch gleich die Wall-E v1.19 aufgespielt. Habe schon sehr lange nichts mehr mit Arduino und den ESPs gemacht. Hatre beim compilen immer einen Fehler den ich erst weg bekam als ich include time.h hinzu gefügt hatte??? Prinzipiell funktioniert das super. Und ich habe auch noch vor ihn in FHEM zu integrieren. Bei mir ladet ab und zu die /web Seite einfach nicht. Json,... Geht alles. Was ich noch cool finden würde wäre eine fixe IP vergeben zu können. APs wahlweise angeben zu können. Hab nur einen, muss trotzdem alle drei SSIDs angeben? Bisschen Strom sollte sich mit dem Light Sleep oder wie das jetzt genau heißt auch noch einsparen lassen. https://github.com/arendst/Sonoff-MQTT-OTA-Arduino/issues/272 Und vor allem was hier schon öfter angesprochen wurde wäre es toll einfach über einen GPIO Pin die Stop Taste zu betätigen um den Robo zu wecken. Nur Ideen/Wünsche. Echt tolle Arbeit! Momentan kämpfe ich noch mit meinem Korridor und vor allem mit dem Netzgerät. Das vom Robo war defekt. Dachte einfache 21,6V Spannungsquelle reicht. Aber nein, es braucht auch noch eine Strombegrenzung. Er hängt hetzt provisorisch mal auf einem Labor Netzgerät. Nächste Woche sollte dann das I und U einstellbare Meanwell Netzgerät da sein. Lg crispyduck
Hallo zusammen, danke für Euren Einsatz, ist eine super Sache geworden! Leider hab ich ein Problem beim kompilieren (Version: 1.19). Ich bekomme folgende Fehlermeldung: 'localtime' was not declared in this scope Die Zeile wird markiert: 1026 strftime(buff, 30, "%a. %d.%m.%Y - %H:%M", localtime(&rawtime)); Kann mir jemand helfen? Danke im Voraus. Was auch nicht schlecht wäre, eine Liste mit den benötigten Bibliotheken und mit welcher Version. Gruß bonsai
Angehängte Dateien:
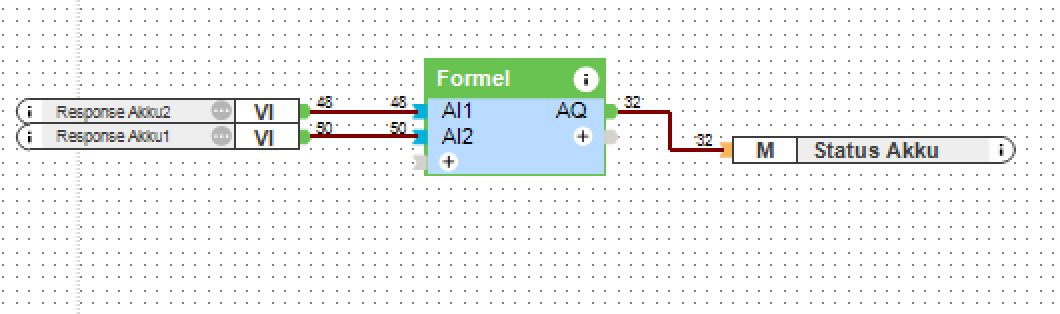
Danke dafür. Irgendetwas habe ich wohl noch nicht richtig verstanden, denn ich erhalte kontininuierlich die gleichen Werte. Ich habe die virtuellen Eingangsbefehle dann unter den Status gehängt, der auch die sonstigen Zustände abfragt (ist ja die gleiche Abfrage). Dann entsprechend Deiner Anleitung die beiden Bytes abgefragt und verformelt. Heraus kommt immer nur der Wert 32. Wo liegt mein Fehler?
Onkel bonsai schrieb: > Ich bekomme folgende Fehlermeldung: > > 'localtime' was not declared in this scope > > Die Zeile wird markiert: > 1026 strftime(buff, 30, "%a. %d.%m.%Y - %H:%M", localtime(&rawtime)); Hab selbst hinbekommen. #include <Time.h> hat den Fehler behoben. Aber bei Version 1.19 erreiche ich das Webfrontend nicht. Der ESP wird mir im Wlan angezeigt und das verbinden klappt auch, aber von der Webseite keine Spur. Habe MQTT und die Automatisation schon auskommentiert. Version 1.15 läuft.
Tobias L. schrieb: > Danke dafür. Irgendetwas habe ich wohl noch nicht richtig verstanden, > denn ich erhalte kontininuierlich die gleichen Werte. > > Ich habe die virtuellen Eingangsbefehle dann unter den Status gehängt, > der auch die sonstigen Zustände abfragt (ist ja die gleiche Abfrage). > Dann entsprechend Deiner Anleitung die beiden Bytes abgefragt und > verformelt. Heraus kommt immer nur der Wert 32. Wo liegt mein Fehler? Ich kann keinen Fehler erkennen. Schau mal in den Monitor evtl. wird deine Answer.xml nicht regelmäßig aktualisiert. Sonst schau dir mal die Answer-xml an. Kannst Sie ja via FTP downloaden.
Onkel bonsai schrieb: > Aber bei Version 1.19 erreiche ich das Webfrontend nicht. > Der ESP wird mir im Wlan angezeigt und das verbinden klappt auch, aber > von der Webseite keine Spur. > Habe MQTT und die Automatisation schon auskommentiert. > > Version 1.15 läuft. Das gleiche Problem habe ich ebenfalls! Versucht habe ich es bisher mit einem D1 mini und einem D1 mini Pro. Auf beiden erreiche ich das Webfrontend nur sehr sporadisch. Ich würde sagen, nur in ca. 20% aller Versuche, klappt der Zugriff. Ebenfalls bei schon mehrfach versucht, MQTT bzw. die Automatisation auszuschalten. Bisherige Erkenntnis: sobald MQTT ein ist, dann klappen nicht mal mehr die o.g. 20%. Dann geht gar nichts mehr. Aber unabhängig davon, ist es so nicht nutzbar.
Hallo, Ich habe einen Gardene Sileno, der auf der aux Schnittstelle voll kompatibel ist, mit der Beschreibung aus Robomower_V0.8.pdf. Habe durch mitloggen der Gardena Smartschnittstelle geschaut, wie der Robi aus dem suspend aufwacht. Ich schicke zuerst
1 | 0x02 ,0x61 ,0x02 ,0x00 ,0x01 ,0x0e ,0x03 |
dann
1 | 0x02 ,0x36 ,0x01 ,0x00 ,0xcb ,0x03 |
danach
1 | 0x02 ,0x12 ,0x01 ,0x01 ,0x9f ,0x03 |
jeweils einfach mit einem delay von 200ms bis zum nächsten Befehl. falls die statusabfrage(letzter Befehl) ergibt, das der Robi noch schläft einfach nach 2 Sekunden nochmal. solange bis er aufwacht. Ich habe beobachtet das sich der Robi regelmäßig auf der seriellen Schnittstelle meldet ( im Standby ). - dann scheint er für dieses Procedere empfänglich zu sein. Die original Gardenaschnittstelle versucht diese durchaus bis zu 10 mal. Jedes dieser Anfragen eribt natürlich eine Antwort - die ich aber geflissentlich ignoriere. danach befindet sich der Robi für ca 1 min. im Betriebszustand und kann ganz normal gesteuert werden. Durch meine versuche hab ich aber bemerkt, das der Akku nur geladen wird, wenn der Roboter auch "wach" ist. Das hat zur folge das ich ihn regelmäßig wecke, damit er seine Batterien prüfen, und gegebenenfalls nachladen kann. (Grund ist - ich habe fürs loggen der Schnittstellen einen raspi in den Mäher installiert)
Angehängte Dateien:
-

IMG_20200827_141640.jpg
230 KB -

IMG_20200827_141643.jpg
240 KB

Hallo zusammen, Danke für das Geniale Projekt.!!! Endlich ist mein gardena im WLAN :-) Ich habe die 1.19 auf einen esp01 direkt ohne weitere elektronik an den mäher angeschlossen. Habe natürlich den falschen Stcker gekauft, aber mit etwas kleber sollte das halten. In meinem FHEM habe ich alle Daten in MQTT die Automatisierung habe ich im sketch auskommentiert, der Rest läuft prima. Eigentlich möchte ich nur wissen ob er nach der Arbeit wieder in der Ladestation angekommen ist und wenn nicht möchte ich eine email bekommen. Das sollte jetzt mit FHEM umstzbar sein. Komischerweise ist er heute nicht nach Timer selbst gestartet, kann aber sein, dass er nicht auf AUTO stand, das werde ich weiter beobachten. Ansonsten läuft es sehr gut und ich habe noch nie eine website mit so schneller reaktionszeit gesehen. Gruß Matthias
Was auch gut wäre, wenn man eine Indoor Tracking Feature hätte, um zu erkennen wo der Mäher gerade sich befindet oder ob er steht oder in Bewegung ist. https://www.hackster.io/news/indoor-positioning-using-arduino-and-machine-learning-in-4-easy-steps-295d39e5e7c9
Würde bei mir gerne über einen GPIO Kontakt die Stop Taste ansteuern. Im Programm wäre hierfür eine Wake Funktion notwendig die dann den GPIO Kontakt kurz ein schaltet. Müsste doch gehen?
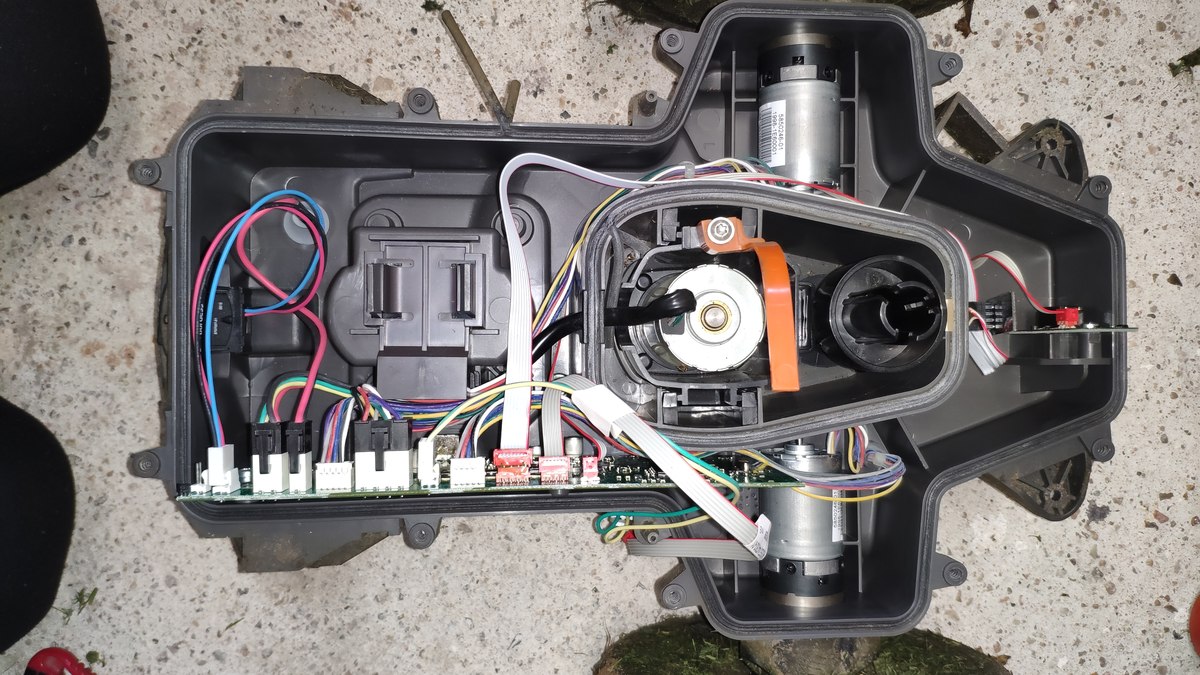
Hi everyone, sorry for posting here in english but my german is definitely not up to the level. I have a Gardena R40li, which as far as know is pretty much the same as the Husqvarna 305 but with a different label. I bought it "broken" second hand from someone who apparently had it running fine until a recent stormy night. The robot works but displays "no loop signal". So the previous owner bought a spare PCB for the base station and as the problem persisted he decided to sell everything to me. I thought it would be easier to debug but so far i'm failing miserably. I have the robot with the base station and 2 PCBs and with both of them the behaviour is the same. I tried different tests. On the docking, if the loop wire is properly set, the status led is solid green and otherwise it flashes in different colors as normally should. The PSU gives 21.5VDC and I assumed it hides no additional functions, so for most of the tests I replaced it with a bench PSU. On the robot everything (apart from the absense of loop signal) seems to work fine. Through the test functions in the display I tried the motors, the hall sensors for collision and lift, current sensor for charging, accelerometer, etc, without problems. I tried the new loop signal generation without success, getting always a "connection not changed" message after timeout. The robot also gives an error when requesting the status of the docking station. I didn't find much online regarding how the signals should look along different points so I placed a differential probe on the loop wire and another one on the charging terminals. If I understood correctly (by observing the behaviour), when requesting a new loop signal, the robot sends some power to at least one motor increasing the power consumption on the charging port thus modulating the voltage at the the docking station voltage output in the form of a digital sequence with a fixed first part and a variable (maybe pseudorandom) second part. In my unit, for some reason, that's all it happens and after that no noticeable changes are seen on the loop signal neither in modulation nor timing. I acquired one of those sequences in the PC, cleaned it (to my best guess) and reproduced it on a [mosfet + dummy load] connected to the docking station (to emulate the robot) but still noticed nothing changing on any output on the docking PCB. I tried some variations of timing and amplitude on the signal without luck. Being a damaged unit (and without access to a functional one) is difficult to further understand how it should work and where the fault is. All the PCBs looked normal to me, without damaged suppressors, capacitors, corrosion, etc.. In the main controller I found no CLK signal on the small microcontroller but also seems like that uC is being permanently held reset by the main one. In any case, as I mentioned before, mostly everything seems to work on the controller so I assume that uC is probably not required for operation... mabe for service...?? or maybe for the failing loop signal detection :) If anything it looked to me like the unresponsive component could be on the docking PCB, but the previous owner had had the same opinion and bought a spare (brand new) one. He sold everything together to me because he just didn't want to spend more money and time on it. I can confirm the behaviour is pretty much the same with both PCBs on the docking station. So now that I found this forum so rich in knowledge about these devices, I was looking if anyone had similar problems, or if someone can tell me how these signals (the loop signal for example) should look on a scope, or if there's any behaviour or trick that can help me find the source of my problem. I googled this issue quite a lot and some people had it and solved it by changing the base station PCB, and some others seems they never solved it. Another alternative would be to replace the firmware on the robot for an open source one, but I havent found any group working on this, nor the pinout for the main microcontroller. If that would be viable i would try to navigate it around useing RTK GPS as they do with Ardumower. I probably missed a lot of information on this group due to my language limitation so I wanted to ask you for your advise in my situation. Thank you! Patricio
Ich hab heute auch meinen Mäher aufgeschraubt u. a. um den Akku zu wechseln. Jedoch lässt er sich jetzt nicht mehr starten. Also einschalten/ausschalten funktioniert, doch beim Drücken auf Start passiert nichts mehr. Zeitplan ist eingestellt. Ansonsten funktioniert der Mäher, also ich komme wie gewohnt in die Menüs etc. Die Einstellungen hab ich schon zurück gesetzt. Nur starten lässt er sich nicht mehr. Ich hatte das gleiche Problem schon vor ein paar Monaten mal. Damals hab ich ein Software-Update gemacht und ich konnte den Mäher anschließend wieder starten. Scheint mir, als wäre das ein Softwarefeature, dass den Start blockiert. Schließlich ist es unwahrscheinlich, dass gleich alle drei Motoren (Rad li/re und Messer) kaputt gehen und außerdem hat vorher alles funktioniert. Weiß da jemand mehr?
Hi Sorry for English, but using google translate to German will not be good for anyone... I have a Automover 315, where I try to get info out with https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/blob/develop/Wall-E_ESP8266_automower.ino using a wemos d1 on aux1. I had to change the code to use Wifi instead of wifimulti, as it doesn't support hidden ssid. However. When its connected I get weird data. e.g. cover is always closed. Battery info and date/time is not correct. No data seems correct. Date is shown as 18.12.2015 (today is 20.12.2020) Voltage is shown as 19.2, but it is 19.7 according to the menu on the mower. note: The mower is placed on my workbench, not in charger. So it looks like it get some data out, but its wrong. Anyone had success with at 315? Thanks
crispyduck schrieb: > Würde bei mir gerne über einen GPIO Kontakt die Stop Taste > ansteuern. > Im Programm wäre hierfür eine Wake Funktion notwendig die dann den GPIO > Kontakt kurz ein schaltet. > Müsste doch gehen? Angenommen wir finden die Stop-Taste auf dem MMI-Stecker. Kann man die bedenkenlos auf LOW setzen, ohne das einem das Board abraucht?
Kim schrieb: > Hi > > Sorry for English, but using google translate to German will not be good > for anyone... > I have a Automover 315, where I try to get info out with > https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/blob/develop/Wall-E_ESP8266_automower.ino > using a wemos d1 on aux1. > I had to change the code to use Wifi instead of wifimulti, as it doesn't > support hidden ssid. > > However. When its connected I get weird data. e.g. cover is always > closed. Battery info and date/time is not correct. No data seems > correct. Date is shown as 18.12.2015 (today is 20.12.2020) Voltage is > shown as 19.2, but it is 19.7 according to the menu on the mower. > > note: The mower is placed on my workbench, not in charger. > > So it looks like it get some data out, but its wrong. > Anyone had success with at 315? > > Thanks Switched to master branch. Was using developer before. But still no luck. Connected wemos d1 with rx/tx pins to aux1, also tried aux2. Tried swap the rx/tx pins, but no connection. The log says: no response no response Invalid response (STATUS 02-12-01-01-9F-03 -> ) Anyone had luck with an Automower 315?
Can you attach a USB TTL adapter? Just to check to response from the mower.
@Kim The mower responses only on commands when its mowing or charging. Just a remark, if you‘re trying to communicate with the mower in a disassembled condition.
Thanks Nils & Felix I've connected the charger cables and a boundary wire, but still no luck. Is that enough or do I need to assemble everything and park it correctly? The wemos is connected to AUX1 on top right(looking from front) on the mainboard. Using a cheap logic analyser I see this from the tx pin of Wemos: '2' (0x02) '2' (0x02) '1' (0x01) '0' (0x00) '139' (0x8B) '3' (0x03) '2' (0x02) '2' (0x02) '1' (0x01) '0' (0x00) '139' (0x8B) '3' (0x03) But nothing on rx. I have verified that there are connection from pins on wemos to mower pcb. Do we know that it work with a 315? thanks and happy new year
Kim, the Automower 315 has for sure a serial interface and I'm pretty sure, that the protocol is the same as the protocol used in wemos software. Can you check if you have an AUX-Port on HMI-PCB (diplay-pcb) or somewhere else? If so, you can try to attach the ESP there. Felix
The AUX1 on the mainboard works. If using a FTDI adaptor and some powershell I'm able to read the clock, by sending 0x02, 0x02, 0x01, 0x00, 0x8b, 0x03 I tried to upload the sketch to a nodemcu board, to rule out faulty wemos. still no communication. So it looks like some software issue, unless I'm so "lucky" to have two faulty boards.
Did some more testing and it now seems like some hardware compatibility issue. If I remove the RX wire from the board, I can see that the AM returns something. If it is connected: nothing. So it cannot change the signal. On the Wemos, there is a 470ohm resistor between the ESP and the CH340 on the RX line. On some of my other clone-boards its a 220Ohm. If I remove that, I start to get some signals and the software can show something, but it is rather flaky. (so might need a pullup on that). I've tried 2 Wemos d1 mini clones. The 470ohms model is the same as the original. Also tried on one original nodemcu board. So why do I see this behavior, when you just connected it directly? And what to suggest? BTW I use the ESP library version 2.7.4
Finally i figured it out. On the wemos d1 mini I had to remove the resistor at RX pin between esp and the cp2104. Then I was able to get some results back. Drawback is that I cannot flash it using the USB, before I add the resistor again. I added some wires so its possbible without soldering I'm using the version 1.19, but had to rewrite it back to wificlient instead of wifimulti as wifimulti is not able to handle multiple hidden ssid. I get some weird cover status, but think it is related to any messages. e.g. unknown (hex: 02-15-01-05-84-03) I think means "Enter Pin code"
Hi everyone, would you know of anyone developping an alternative formware for husqvarna / gardena robot mowers? I recently fried the STM32 micro in the mainboard of my R40li and the 3.3V rail went on short circuit. I think Manuel up there had the same issue. So I unsoldered the micro and now the 3.3V rail is OK again. I ordered a new STM32 (not so bradly available nowadays!) and of course the main issue now will be the FW. Does anyone know if it can be flashed with autocheck? I could try to look around my area for dealers that might have it. If I dont succeed to flash it with the original FW then I'd like to try my own stuff. I already worked out most of the pinout on the STM32. I saw someone did this for Worx (https://hackaday.com/2016/05/04/reverse-engineer-your-robot-lawnmower/) so in principle it shouldnt be impossible. The pitty is also that in my Gardena I have 2 microcontrollers in the main board (the one i'm replacing and a smaller one that controls the blade motor) and an extra one for the UI (keyboard + display) so I would need to work out their communication protocol or prepare FW for all 3 (4 if you also count the charging station). It would be nice to have the level of control they have with the Ardumower eventually. Thoughts? Cheers! Patricio
Angehängte Dateien:
-

STM32-IFCE.jpg
240 KB
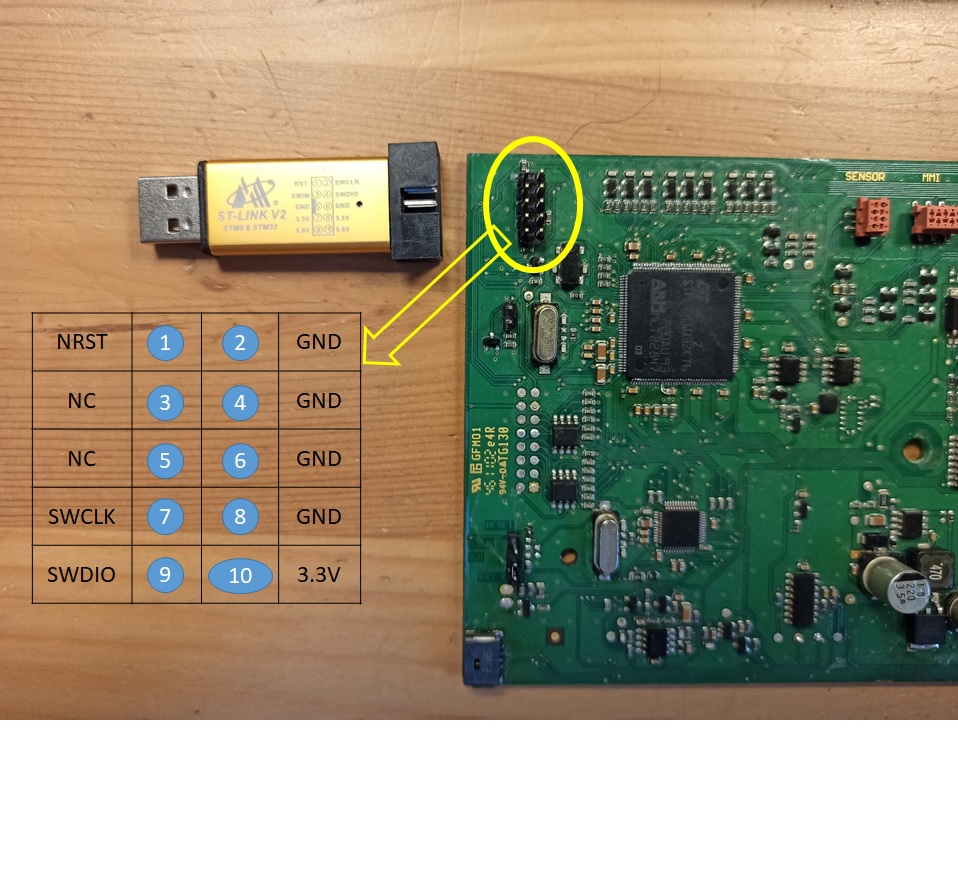
Hi everyone, I started working on the development of a homebrew FW for my R40Li. I have now a full mapping for the pinout of the MCUs and for almost all testpoints on board. For some development purposes it would be very helpful to observe how the original FW works on the board. Unfortunately I had damaged the original STM32 MCU (when installing ESP8266 module) and had to replace it with a new one, and since this accident occurred quite early I did not manage to get a memory dump in order to restore the original FW. I'm wondering if anyone who has an R40Li or similar (R70, husqvarna, etc) would be able to read the FW from the STM32 and put it available for me. It would be also a good backup for themselves or anyone else that has a MCU tragedy. As long as the boards are same type the FW should be compatible. The FW in the MCUs is non read protected so it can be easily backed up with an ST-LINK adapter and "STM32 ST-link Utility" software. I easily read the MMI board FW and the one for the small STM8 in the mainboard, for which the STM8 version of the software is needed. In the picture you can see the ST-link V2 adapter and the robot mainboard. The headers for the board and adapter are not pin to pin compatible so you need to connect the 5 lines accordingly. Do not use 5V! Let me know if you have any questions. CHeers, Patricio
Patricio, what I tried a couple of weeks ago was to check the Gardena robotic mower upgrade tool (as I have a Sileno City) for a hint regarding the firmware. This tool is downloading the firmware from the husqvarna servers and then sending it to the mower. Thats a different approach in comparison to yours, but will lead to the same result in the end. What do you think? I didn't finish my work there, because I'm focused on the MMI-Interface. Felix
Hi Felix, Someone got me a winner "trilogy" pack of FWs compatible for my model and with a bit of patience and luck I got it working again. I learned that the FWs in the "main" MCU, the MMI and the "aux" MCU have to be compatible, so you can't just expect that if two mowers are identical their FWs are compatible, since one might have been upgraded or sligtly newer and the FWs in their MCUs won't work together. So you need the 3 FWs. The FWs I got were not a full memory dump and were missing some "loader" section that I copied from the MMI. I had to try several methods (using different flashers) several times and somehow progresively I got to where I wanted, so in the end i dont really have a precise recipie, but now I have a full memory dump for the 3 MCUs as a backup, done with the ST-LINK. Lesson learned. The pinout for the MMI "jtag" is the same as for the main MCU, and for the STM8 I mounted the unpopullated ERNI 214012 connector as in the picture and accesed via SWIM with the same ST-LINK. Everything is readable and the FW is not encrypted. I think you might be right regarding the method you described to sniff the FW before uploading, but i dont think my mower is compatible with the gardena tool since it's an older generation. Thanks anyway! I wonder what happened to Manuel and his burned MCU. It took me a lot of work to do mine but now I would be able to do it much faster and probably tidier. Cheers! Patricio
Patricio, can you share the memory dumps? Where did you get it? Maybe we can learn something from the old mower firmware-dumps and transfer this knowledge to the newer mowers. Do you have access to a Sileno City and can you create a dump of this mower? Thanks, Felix
Hi Felix, I'm sharing the file that a friend sent me with the FW "trilogy" for the r40li. He didnt mention where he got it from but it helped a lot to bring back to life my dead board after replacing the main MCU, and saved me like 300 euros in a new board, which would have been more or less the price for a second hand robot like this one. Hopefully it'll help other people too who might want to fix their unit instead of having to trash it. The FW is "old" but better than nothing. As I said before, the MCU replacement and flashing process was not straight forward and I would only recommend it as a last resource when there's nothign to lose. I don't have a Sileno city nor access to one :( It'd be nice to open a repository with a FW collection.... My mower now works like new which makes it also useful for having a live unit to play with and try to better understand the communication between the 3 MCUs. Are you planning to dissasemble the dumps? I'd be very interested not only in the communication commands but also in finding a way to steer the navigation. I wonder if the bouncing angles are random and if it would be possible to add little routine to fetch the next angle from. If so, you could have a say in the navigation and make it more deterministic, by maybe having an external system (maybe gps based) to whisper the next bouncing angle. It still wouldn't be a "waypoint" regulation like in the rtk gps ardumower buuut perhaps better than fully random. Cheers, Patricio
Patricio, thanks for sharing the dumps. Yes, I'm planing to have a look into it but I had not time, yet. What about you? From the dump we can get all communication commands and create a external navigation. We can attach a rtk gps from ardumower, too, and use the gardena mower only as a "chassis". What do you think? Cheers, Felix
Angehängte Dateien:
-

hterm_r40li.JPG
110 KB
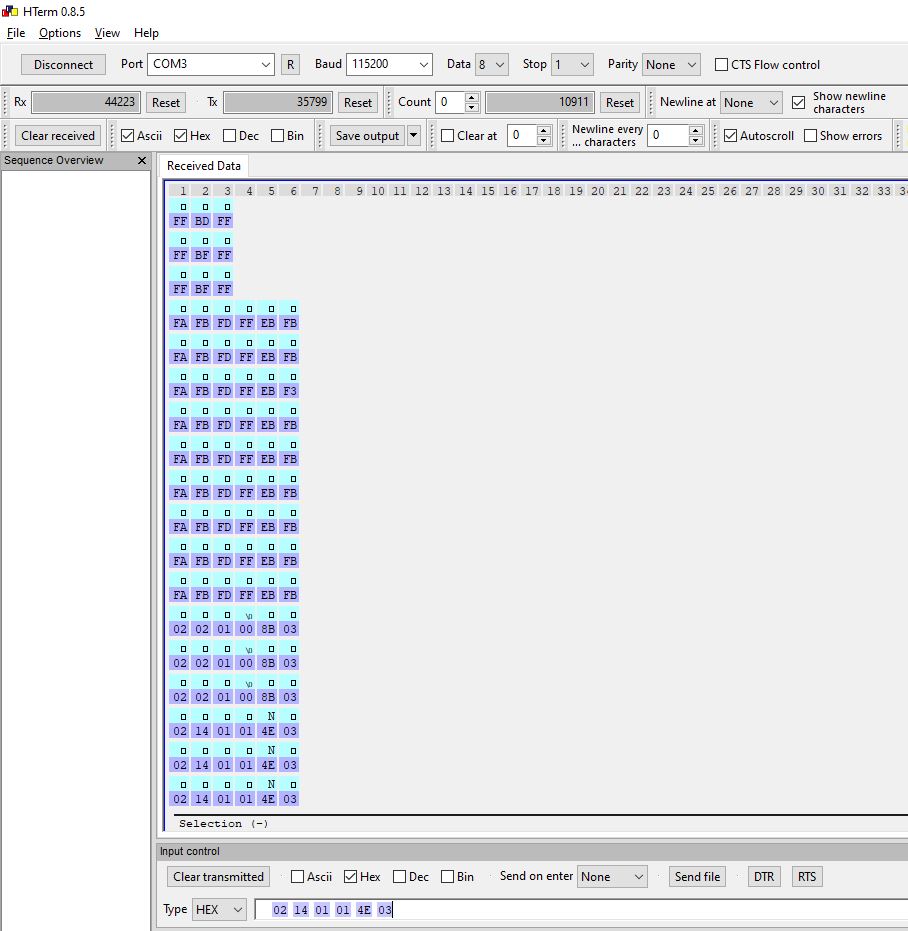
Moin zusammen, ich habe mit Begeisterung den gesamtem Verlauf dieses Foreneintrages verfolgt und mich daran versucht, ebenfalls mit meinem R40LI zu kommunizieren. Leider blieb dies bisher erfolglos. Nachdem ich mit meinem Wemos D1 mini mit der 1.19 Version von https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/tree/develop keine Kommunikation mit dem Roboter herstellen konnte, habe ich mich mal mit meinem FTDI Adapter direkt darauf verbunden. Es kommt aber nicht das an, was ich erwarte. Auf Befehle reagiert er gar nicht, es sei denn, ich schalte den R40LI an und aus. Dann kommen kurze Rückmeldungen, die ich aber nicht einordnen kann. Vielleicht hat das ja schonmal jemand gesehen oder kann mir weiterhelfen? Ich bin mit meinem Latein am Ende.
Hallo, interessantes Projekt. Ich habe einen Gardena Sileno+. Da ich nicht nur Elektroniker sondern auch Softwareentwickler bin nehme ich das Projekt mal für mich auf und versuche mich daran.
ich hab mich auch mal dran gemacht unseren automower 105 wlanfähig zu bekommen. Motherboard schaut etwas anders aus aber aux ist vorhanden. bin wie einige hier auch an der rückmeldung gescheitert. steuern geht ohne probleme. oszi zeigt auch, wenn der wemos d1 nicht angeschlossen ist, ein serielles signal. hängt rx dran ist es aus mit dem signal. hatte zwei "Mini RS232 zu TTL MAX3232 Konverter Adapter Modulplatine Serielle Schnittstelle Transferplatine 3-5V" rumliegen. die habe ich jetzt "in serie" am mäher ausgang hängen.... als mäher-tx auf rx ttl vom ersten konverter, tx rs232 vom ersten konverter auf rx rs232 vom zweiten konverter... zweiter konverter tx ttl auf rx vom wemos.... was soll ich sagen... es gibt sicher schönere lösungen, aber es funktioniert stabil ;-) vielleicht hilf es jemanden ;-) herzlichen dank an alle die sich so eine mühe gemacht haben... bin begeistert das ding jetzt in fhem zu haben. lg nussa
Hallo, seid ihr hier mit der Entlicklung noch weiter aktiv ? Habe jetzt versucht den Wemos D1 zu programmieren. Mit der Version 1.14 läuft alles nur leider bekomme ich die Version 1.15 nicht ans laufen . Er verbindet sich in mein Wlan aber dann reagiert er nicht mehr . Kann nicht mal auf das Webinterface zugreifen . Könnt mir evtl jemand helfen ? MFG
Ich habe probiert die wemos d1 mit code von Nils rein zu machen. Wann is uart-tx und rx auf wemos zusamen machen, krieg ich ein schönes antwordt in die browser. Die wemos functioniert. Wann ich die wemos in die 305 mach. Dann könnte ich von HOME nach MAN und zuruck schalten, sieht aus dass uart tx wemos --> uart rx 305 functioniert. Aber ich krieg nichts zuruck. Weiss jemand wass zu tun?
Ich habe dass gemacht wie Nussa geschrieben hatte, functioniert. Danke Nussa
Nils B. schrieb: > @Kim > > The mower responses only on commands when its mowing or charging. Just a > remark, if you‘re trying to communicate with the mower in a disassembled > condition. Hello Nils and Daniel Sorry for writing in English, my German isn't that good ;-) I've got a Gardena R40Li, from 2012. Working perfect, but want to change it to a Smartmower. Found your great work and Daniel's add-ons.. I bought myself a Wemos D1 Pro, loaded the arduino 1.19 sketch..., and build it in the Gardena. Everything looked fine, but when mowing or in charging: 1 http://192.168.1.123 is working 2 http://192.168.1.123/web is working but after 30 sec, screen turns black. 3 http://192.168.123/web before going black shows no response, for mower, cover etc. I 3x double checked wiring, shortened the flat cable, kept out of the motors.. Do I need to change some switch or something like that? Thank you so much for this tollen project!
Angehängte Dateien:
Pieter G. schrieb: > 1 http://192.168.1.123 is working > 2 http://192.168.1.123/web is working but after 30 sec, screen turns > black. > 3 http://192.168.123/web before going black shows no response, for > mower, cover etc. The ip-adresses were examples. The real one is 10.187.1.123. hereby also the screenshots. Some help would be appreciated! Thank!
Pieter G. schrieb: > Just a >> remark, if you‘re trying to communicate with the mower in a disassembled >> condition. This means if you want to test the serial connection, you need to assemble the mower and let it work? No serial connection when dissembled? Thanks, Pieter
Angehängte Dateien:
-

WLAN_UART.jpg
220 KB -

2.png
17 KB

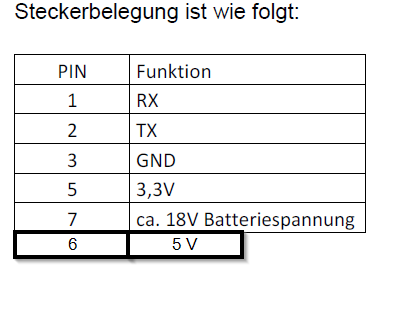
Maybe the serial port is defect, how to find out? I also found this picture https://www.mikrocontroller.net/attachment/275049/WLAN_UART.JPG The 3,3V is connected with D0 & Rst. Which is not described in the pin-out in this forum. What does is de? And would it help to solve my problem? Thank you!
Pieter G. schrieb: > The 3,3V is connected That had to be pin 5 connected to 3v3, RST & D0, probably something to do with "enable sleep"... ???
Hi Pieter, have you tried to change RX/TX? This is the most common error... What happens if you manually trigger actions (e.g. to home or to receive the cover information)? What might also help is the hint posted by nussa (20.04.2021 21:35). Best regards
Angehängte Dateien:
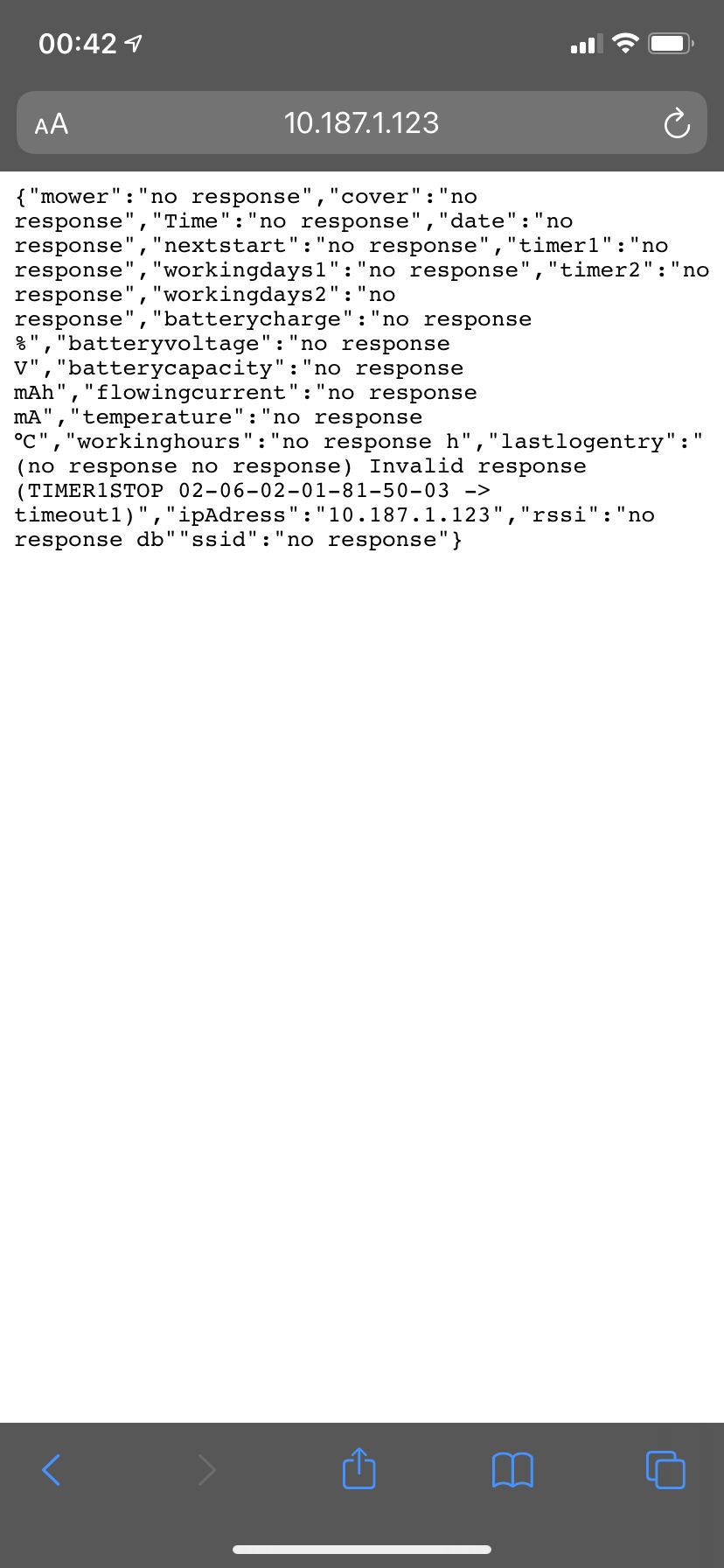
Hello Daniel, Thanks for your quick answer. Yes, I changed the TX and RX. Even used a second Wemos D1. Same result. Every command I give on the website of the Mow-E, I get no response as answer. You see the same result when I call http://10.187.1.125/json. (see picture). Am I doing something wrong, or a switch I need to set? Thank you again! Pieter
nussa schrieb: > bin wie einige hier auch an der rückmeldung gescheitert. steuern geht > ohne probleme. oszi zeigt auch, wenn der wemos d1 nicht angeschlossen > ist, ein serielles signal. hängt rx dran ist es aus mit dem signal. > hatte zwei "Mini RS232 zu TTL MAX3232 Konverter Adapter Modulplatine > Serielle Schnittstelle Transferplatine 3-5V" rumliegen. > die habe ich jetzt "in serie" am mäher ausgang hängen.... als mäher-tx > auf rx ttl vom ersten konverter, tx rs232 vom ersten konverter auf rx > rs232 vom zweiten konverter... zweiter konverter tx ttl auf rx vom > wemos.... was soll ich sagen... es gibt sicher schönere lösungen, aber > es funktioniert stabil ;-) I don't understand this exactly, can you help me explain? Translate by Goole is a bit weird in this one. And what means OSZI? Thanks!
Pieter G. schrieb: > Pieter G. schrieb: > >> Just a >>> remark, if you‘re trying to communicate with the mower in a disassembled >>> condition. > > This means if you want to test the serial connection, you need to > assemble the mower and let it work? No serial connection when > dissembled? > Thanks, Pieter Yes, you have to re-assemble the mower as it only answers on commands during mowing or charging. It’s really annoying. Did this plenty of times at the beginning to test the wiring and software. Hope this helps.
Pieter G. schrieb: > nussa schrieb: >> bin wie einige hier auch an der rückmeldung gescheitert. steuern geht > > I don't understand this exactly, can you help me explain? Translate by > Goole is a bit weird in this one. And what means OSZI? Here is the translation of nussas post:
1 | "Like some here on the forum I did not get a response from the mower, but sending commands to the mower worked fine. I also got a signal from the serial interface via oscilloscope (OSZI) when Wemos D1 was not connected. I had two "Mini RS232 to TTL MAX3232 converting adapter serial interface transferboard 3-5V" at home. I now use these in series between Wemos and the mower - mower-TX to TTL-RX of the first converter, RS232-TX from first converter to RS232-RX of the second converter, second converter TTL-TX to Wemos RX. There are certainly nicer solutions, but it works stable ;-)" |
There seem to be two different versions of R40Li - one with build-date before 2016 and one with build-date of 2016 and later. This can also be seen from the website of Robonect, where two different versions are provided (https://www.robonect-shop.de/shop/robonect-hx/). I myself have a 2016 version where it works fine. Maybe there is a difference in the pin-assignment of the serial interface of the older versions. Can anybody confirm that the Wemos solution works with build-date before 2016? You can see the build-year from the serial number (first 2 digits).
Hello Daniel, Thanks for your help. You might be right that’s it is a different implementation of the serial before 2016. I don’t have as oszi ;-), so can’t check. The pin assignment of 3,5 & 6 are same as in the instruction, so I hope/think 1 & 2 are also the same. Maybe a lower signal? I orderded 2 “Mini RS232 to TTL MAX3232” to find out if that works. Keep you posted! Thanks, Pieter
Angehängte Dateien:

Nils B. schrieb: > Yes, you have to re-assemble the mower as it only answers on commands > during mowing or charging. It’s really annoying. Did this plenty of > times at the beginning to test the wiring and software. Thanks Nils! I made the flat-cable to come out on top of the keyboard. Works fine for testing. Just hope no rain ;-). When it work I will rebuild is inside the mower again! Thanks, Pieter
Beitrag #6749854 wurde von einem Moderator gelöscht.
hallo, ein Freund hat einen GARDENA SILENO City. er hat aber keinen PIN dafür. das ding hat er bei ebay-kleinanziegen gekauft. und ihm wurde kein PIN mitgegeben. und hat auch kein kontakt mehr zu dem verkäufer. und nicht mal eine rechnung war dabei. wahrscheinlich vom LKW gefallen. glaube wohl kaum das Gardena dabei behilflich sein wird. gibt es eine möglichkeit. das ding zu knacken ? ist es mit diesem Controller möglich einen root zugriff zu bekommen ? lg
Pieter G. schrieb: > Hello Daniel, > > Thanks for your help. You might be right that’s it is a different > implementation of the serial before 2016. I don’t have as oszi ;-), so > can’t check. The pin assignment of 3,5 & 6 are same as in the > instruction, so I hope/think 1 & 2 are also the same. Maybe a lower > signal? > > I orderded 2 “Mini RS232 to TTL MAX3232” to find out if that works. Keep > you posted! > > Thanks, Pieter Hello Daniel, A few week further... I got my 2 mini RS232 to TTL MAX3232 pieces, connected them in serie, and put them between the flat cable and the Wemos. No signal ;-( Then I thought it should be possible to communicate with a USB to TTL serial adapter. Also no response on any command I gave. What can be wrong? There must be a way to communicate with the 2012 R40Li. Thanks, Pieter
nussa schrieb: > ich hab mich auch mal dran gemacht unseren automower 105 wlanfähig zu > bekommen. > Motherboard schaut etwas anders aus aber aux ist vorhanden. > > bin wie einige hier auch an der rückmeldung gescheitert. steuern geht > ohne probleme. oszi zeigt auch, wenn der wemos d1 nicht angeschlossen > ist, ein serielles signal. hängt rx dran ist es aus mit dem signal. > hatte zwei "Mini RS232 zu TTL MAX3232 Konverter Adapter Modulplatine > Serielle Schnittstelle Transferplatine 3-5V" rumliegen. > die habe ich jetzt "in serie" am mäher ausgang hängen.... als mäher-tx > auf rx ttl vom ersten konverter, tx rs232 vom ersten konverter auf rx > rs232 vom zweiten konverter... zweiter konverter tx ttl auf rx vom > wemos.... was soll ich sagen... es gibt sicher schönere lösungen, aber > es funktioniert stabil ;-) > > vielleicht hilf es jemanden ;-) > > herzlichen dank an alle die sich so eine mühe gemacht haben... bin > begeistert das ding jetzt in fhem zu haben. > > lg nussa Hello Nussa, can you tell how old your Automower 105 is, and make pictures of your connectors and how you connected the Wemos D1? Thanks, Pieter
Kennt jemand den Schaltplan des Sensoranschlusses auf dem Mainboard? Ich würde gerne einen 2. Kollisionssensor montieren, aber ursprünglich ist dies ein Hallsensor, ich wöllte gern einen Schließer/Öffner schalter hinfügen
hallo zusammen ich habe ein paar probleme hier. Wenn ich v1.15 sketch auf meinen wemos flashe kann ich die website nicht erreichen. Ich habe den Microcontroller noch nicht mit meinem R40li verbunden, aber das sollte ja keinen einfluss haben oder? Hat jemand eine idee? Vielen dank für die hilfe :)
hermanndererdmann schrieb: > hallo zusammen > > ich habe ein paar probleme hier. > > Wenn ich v1.15 sketch auf meinen wemos flashe kann ich die website nicht > erreichen. > Ich habe den Microcontroller noch nicht mit meinem R40li verbunden, aber > das sollte ja keinen einfluss haben oder? Hast du geprüft ob der Wemos sich beim Router anmeldet? Versuche mal MQTT und Automation zu deaktivieren (Siehe Beitrag "Re: Automower G3 mit USB Diagnoseport fernsteuern?"). Gruß
Paul Hermans schrieb: > Kennt jemand den Schaltplan des Sensoranschlusses auf dem Mainboard? Leider nicht. Gruß
> A few week further... I got my 2 mini RS232 to TTL MAX3232 pieces, > connected them in serie, and put them between the flat cable and the > Wemos. No signal ;-( > What can be wrong? There must be a way to communicate with the 2012 > R40Li. Hi Pieter, do you have any possibility to evaluate the signals on the RS232 port?
Hello Daniel, I would love too, but there is no signal. I think that's the problem: or the serial Port of R40Li is broken. Or the pin-layout is different. That's why I asked nussa if she has pictures of her R40Li connector 2012. Grt. Pieter
Angehängte Dateien:


Daniel D. schrieb: >> A few week further... I got my 2 mini RS232 to TTL MAX3232 pieces, >> connected them in serie, and put them between the flat cable and the >> Wemos. No signal ;-( >> What can be wrong? There must be a way to communicate with the 2012 >> R40Li. > > Hi Pieter, do you have any possibility to evaluate the signals on the > RS232 port? Hello Daniel, I tried again to connect my Gardena R40Li (2012) to my MacBook Pro. I use a Ch340 Module Usb To Serial. I tested the Usb to serial module by connecting Tx with Rx. I see back what I type in the terminal, so I assume that's working. Then I tried to connect the R40Li with the USB to Serial module directly, 115200 / 8-N-1, cablelength 10 cm: Gnd <--> Gnd Tx <--> Rx Rx <--> Tx Started the mower to start mowing on the grass, while connected. No output in terminal. I also entered commands, like 02 02 01 00 8b 03, but no response. What could be wrong? Another thought, is it possible to connect via the USB-B port in the battery compartment? Thanks, Pieter
Hi, have you already measured the ports with the oscilloscope? Thanks
Felix schrieb: > Hi, > > have you already measured the ports with the oscilloscope? > > Thanks Hello Felix, thanks for your reaction. I don't have oscilloscope... Other method? Thanks! Pieter
Hi Peter, you can find a serial interface with a multimeter, just google "how to find Tx Rx and Gnd". However I recommend you to use a oscilloscope. Do you have a multimeter? Regards, Felix
Other question: does anyone have a smart system and can record the commands to recover a mower that is outside the loop? or does anyone know the commands (telegrams) to recover a mower that is outside the loop? On my Sileno 250 everything is working nice, I even can wake him up if he is not mowing. My only problem is that he sometimes is leaving the loop. Therefor I want to drive him automatically 20 cm backwards and set him into mowing mode again if he exited the mowing area. Do you know how that could be possible?
Hallo, Das hier ist doch ein deutsches Forum? So wie man sich Mühe geben sollte in einem Englisch/amerikanischem Forum auf Englisch zu antworten/zu fragen, Sollte man das hier auch in Deutsch tun. um auch den anderen Mitgliedern die nicht so gut englisch beherrschen an der Unterhaltung Teil zu nehmen.
Du hast recht. Ich bin auf der Suche nach den Telegrammen, womit ich meinen Mäher wieder zurückholen kann, nachdem er die Schleife aus versehen verlassen hat. Ich stell mir das so vor: 1. Mäher mäht 2. verlässt den Arbeitsbereich und stoppt 3. ESP erkennt das 4. ESP fährt den Mäher 30 cm nach hinten 5. ESP aktiviert den Mäher wieder; dreht ihn ggf. 6. Mäher mäht wieder 1-3 ist klar; 4 wahrscheinlich auch noch Weiß jemand was zu 5? Einfach "Auto" setzen? Geht das trotz Fehlermeldung? Danke, Felix
Felix schrieb: > Weiß jemand was zu 5? Einfach "Auto" setzen? Geht das trotz > Fehlermeldung? Nach meiner Erfahrung funktioniert es nicht - die Fehlermeldung muss über die Bedienoberfläche quittiert und der Mäher manuell gestartet werden. Da könnte der Robonect-Ansatz mit einem Abgreifen der Signale vom Bedienfeld und ggf. Setzen eigener Signale helfen. Das wurde in diesem Projekt aber bislang weder Hardware- noch Softwareseitig umgesetzt. Gruß
Hi Anyone knwos where to find a 5V rail in automower 315? The 5V in AUX turns off after some time when charging, which makes it hard to make automation around. Only the 18V is always on. Thanks Kim
Felix schrieb: > Hi Peter, > > you can find a serial interface with a multimeter, just google "how to > find Tx Rx and Gnd". However I recommend you to use a oscilloscope. > > Do you have a multimeter? > > Regards, > Felix Hallo Felix und andere, Nach meinem Urlaub tauchte ich wieder hinein (war doch schlechtes Wetter ;-) ) Was ich sehe ist, dass es einen Unterschied zwischen den Gardena R38Li, R40Li, R45Li, R50Li, R70Li, R80Li bis 2015 und den Gardena R38Li, R40Li, R45Li, R50Li, R70Li, R80Li von 2016 gibt. Bei Robonect gibt es zwei umbausets: - Umbauset - Adapter 6p (bis einschließlich Baujahr 2015) - Umbauset - Adapter 10p (ab Baujahr 2016) https://www.robonect-shop.de/shop/robonect-hx/umbausets/ Jetzt frage ich mich, ob jemand einen Gardena R38Li, R40Li, R45Li, R50Li, R70Li, R80Li bis einschließlich Baujahr 2015 hat. Danke im Voraus! Hello Felix and others, After my vacation I dived back in (it was bad weather ;-)) What I see is that there is a difference between the Gardena R38Li, R40Li, R45Li, R50Li, R70Li, R80Li up to 2015 and the Gardena R38Li, R40Li, R45Li, R50Li, R70Li, R80Li from 2016. Robonect has two conversion kits: - Conversion set - adapter 6p (up to and including year of construction 2015) - Conversion set - adapter 10p (from year of construction 2016) https://www.robonect-shop.de/shop/robonect-hx/umbausets/ Now I wonder if anyone has a Gardena R38Li, R40Li, R45Li, R50Li, R70Li, R80Li built up to and including 2015. Thanks in advance!
Tobias L. schrieb: > Akku Daniel D. schrieb: > Tobias L. schrieb: >> Weiss jemand, wie ich den Akkustand abfragen kann? > > In dem von dir verlinkten Robomover_V0.8 ist es schon hinterlegt, wie > die Antwort auszuwerten ist: Byte 6 und 7 von HEX nach DEC wandeln und > du hast die Akkukapazität. Hat jemand in der Zwischenzeit eine einigermaßen einfach zu integrierende Lösung für Loxone zur Abfrage des Akkustands gefunden? Das unter obigen Beitrag verlinkte Beispiel ist mir etwas zu kompliziert. Wäre toll, wenn jemand eine fertige Lösung hätte.
Daniel D. schrieb: > Felix schrieb: >> Weiß jemand was zu 5? Einfach "Auto" setzen? Geht das trotz >> Fehlermeldung? > > Nach meiner Erfahrung funktioniert es nicht - die Fehlermeldung muss > über die Bedienoberfläche quittiert und der Mäher manuell gestartet > werden. > Da könnte der Robonect-Ansatz mit einem Abgreifen der Signale vom > Bedienfeld und ggf. Setzen eigener Signale helfen. > Das wurde in diesem Projekt aber bislang weder Hardware- noch > Softwareseitig umgesetzt. > Gruß Ich hab mich mit dem RasPi auf die MMI verbunden und lausche den Telegrammen. Ganz schlau bin ich noch nicht, da die Telegramme ein bisschen anders aussehen.
koenig223 schrieb: > Tobias L. schrieb: >> Akku > > Daniel D. schrieb: >> Tobias L. schrieb: >>> Weiss jemand, wie ich den Akkustand abfragen kann? >> >> In dem von dir verlinkten Robomover_V0.8 ist es schon hinterlegt, wie >> die Antwort auszuwerten ist: Byte 6 und 7 von HEX nach DEC wandeln und >> du hast die Akkukapazität. > > Hat jemand in der Zwischenzeit eine einigermaßen einfach zu > integrierende Lösung für Loxone zur Abfrage des Akkustands gefunden? Das > unter obigen Beitrag verlinkte Beispiel ist mir etwas zu kompliziert. > Wäre toll, wenn jemand eine fertige Lösung hätte. Dann nimm am besten Robonect.
koenig223 schrieb: > Tobias L. schrieb: >> Akku > > Daniel D. schrieb: >> Tobias L. schrieb: >>> Weiss jemand, wie ich den Akkustand abfragen kann? >> >> In dem von dir verlinkten Robomover_V0.8 ist es schon hinterlegt, wie >> die Antwort auszuwerten ist: Byte 6 und 7 von HEX nach DEC wandeln und >> du hast die Akkukapazität. > > Hat jemand in der Zwischenzeit eine einigermaßen einfach zu > integrierende Lösung für Loxone zur Abfrage des Akkustands gefunden? Das > unter obigen Beitrag verlinkte Beispiel ist mir etwas zu kompliziert. > Wäre toll, wenn jemand eine fertige Lösung hätte. Auslesen des Bytes habe ich bei mir drin. Wenn du mir ne pn schreibst mit deiner mail sende ich dir die vituellen inputs und screenshots zu.
Hallo zusammen, ich experimentiere gerade mit den Motortests bei meinem r40li. Der Mähmotor kann ohne Probleme gesteuert werden. Bei den Radmotoren bestätigt der r40li zwar das Kommando jedoch bewegen sich diese nicht. Hat jemand diesbezüglich Erfahrung ? LG
Hallo Jack, du bist weiter als ich. Aus welchem Baujahr ist dein R40Li? Danke im Voraus! Grüße, Pieter
Ich bin mit Interesse auch auf dieses Projekt gestossen und hoffe es wird immer noch aktiv weiterverfolgt? Zuerst bin ich natürlich auch über Robonect gestolpert. Da ich meinen R40li Baujahr 2013 aber für weniger Geld erstanden habe, als die Zusatzplatine kosten würde, ist das nicht wirklich eine Alternative. Daher will ich den kommenden Winterschlaf für den Mäher nutzen, um dieses Modul nach- und einzubauen. Wenn ich das richtig gelesen habe, wurde ja immer noch keine finale Lösung dafür gefunden, dass die 5V ausgehen, wenn der Mäher nicht aktiv ist und das Modul daher nicht mehr ansprechbar ist. Nun habe ich mir überlegt, ob es nicht eine Möglichkeit wäre z.B. ein MH-CD42 in die 5V Leitung mit einer entsprechenden Batterie einzuschlaufen. Die Idee wäre, dass die Batterie geladen wird, solange die 5V aktiv sind und die geladene Spannung dann reicht, um die Platine mit Strom zu versorgen, bis der nächste ordentliche Mähzyklus oder Startbefehl kommt. Alternativ gibt es auch Platinen, welche mit 12V Eingang umgehen können und 5V raus lassen. Einschätzungen dazu wären sehr willkommen.
Ich hab mich bei meinem Sileno einfach an den 18 V bedient, die sind immer verfügbar.
Hallo Daniel, das Problem ist das der Mäher sich über die AUX Schnittstelle des Boards nicht mehr meldet. Das Robonect löst dieses Problem in dem es zwischen MMI (Display) und Mainboard angeschlossen wird. Das Robonect Board bedient hierbei den STOP-Taster des Mähers, um ihn aufzuwecken. Ich habe mir das Board Design mal genau angesehen. Der STOP Taster geht auf einen Interrupt PIN des Prozessors. Meine Vermutung ist das der Prozessor in den Sleep Modus geht, somit auch die AUX Schnittstelle nicht mehr aktiv ist. Auf dem Board gibt es neben dem Stecker für den EIN/AUS Schalter einen 2poligen Stecker (STOP). Der sollte im Grunde das selbe tun. Das müsste einer mit einem kleinen Testprogramm/Hardware mal ausprobieren. Gruß Follow2000
Hi, ich verstehe das Problem nicht. Die 18V auf der AUX sind verfügbar, auch wenn der Mäher in der Ladestation steht. Wenn er in der Ladestation steht, kann man ihn aufwecken und die Kommandos senden. Grüße
Das sollte doch mal das ursprüngliche Problem gewesen sein. Wenn er in der Ladestation steht kommuniziert er nach einiger Zeit nicht mehr über die AUX Schnittstelle. Ist das beim Sileno anders ? Vom 305 und von der r40, r70… kenne ich das nur so.
Christoph H. schrieb: > Christoph H. > (c_hacky) > > > > > > > > > 28.08.2020 14:32 Ich wecke ihn damit, wenn er in der Ladestation ist und schläft. Klappt meinem Sileno City super. Und wie gesagt, die 18V stehen immer an.
Sorry, dann hatte ich das falsch mitgeschnitten und nicht der Strom war das Problem, sondern die Schnittstelle, welche Abtaucht. Aber wenigstens konnte ich so die Diskussion wiederbeleben und vielleicht findet sich ja doch noch eine Lösung für alle älteren Modelle. Ich jedenfalls wäre sehr interessiert daran. Die früher beschriebene Lösung mit den Timern finde ich subideal, da man damit das Eprom ja jedes Mal neu schreibt und die leiden bei den Robotern teilweise sonst ja schon an Alzheimer (was man so liest). Leider bin ich selber technisch zu wenig mit dabei, um da aktiv an der Lösung beitragen zu können und kann höchstens anbieten mich (resp. natürlich meinen R40li) als Testdummy zur Verfügung zu stellen, sofern es unkritische Aktionen sind (will natürlich auch kein MainBoard vom Mäher zerschiessen). Aktuell liegt er auf jeden Fall offen auf meiner Werkbank zur Reinigung und kann für weitere Aktionen vorbereitet werden.
Betrifft nur die R**Li's: Schau doch mal, ob Du den "Stop-Taster" ausfindig machen kannst. Bei den R**Li's hängt dieser noch am Display-Kabel, nicht direkt auf der Hauptplatine. Ich würde mal mit dem Oszi schauen.
Angehängte Dateien:
-

IMG_6721.JPG
230 KB
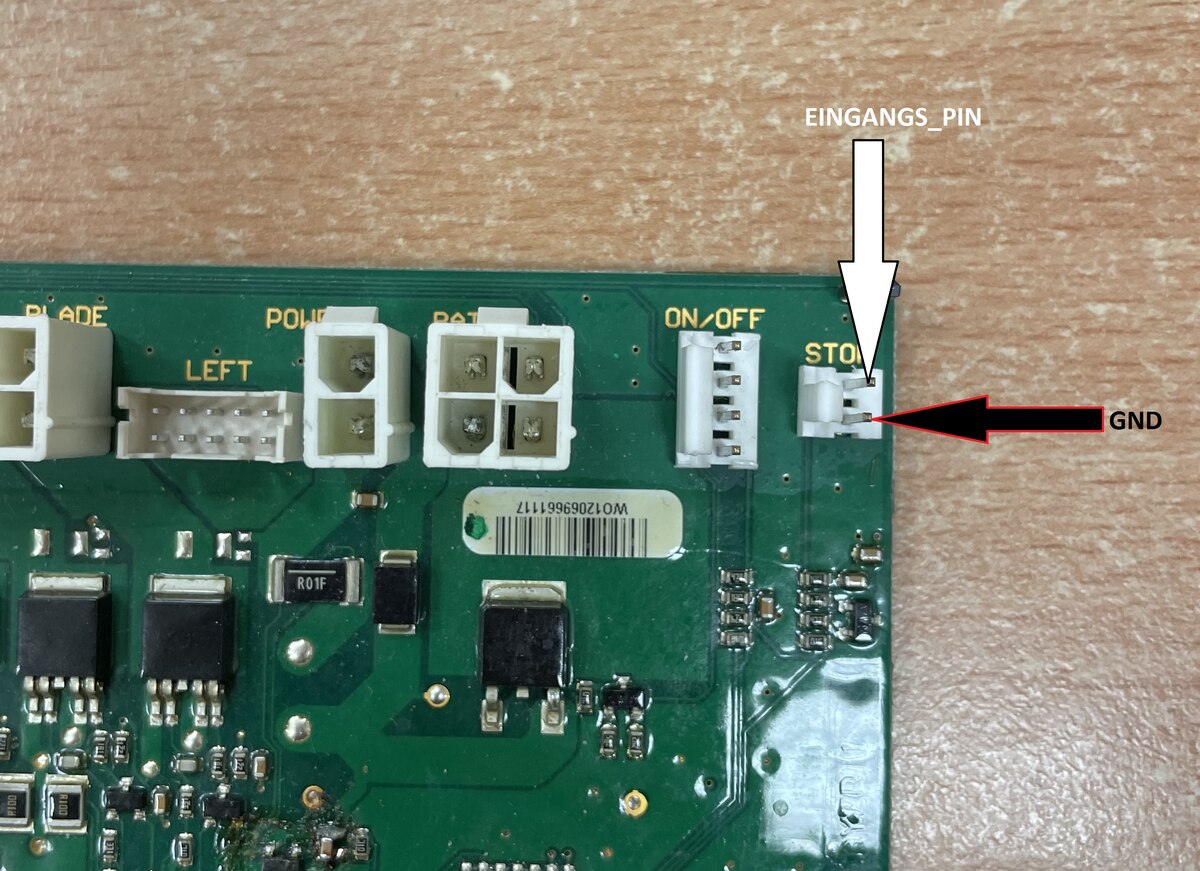
Hallo Felix, der Stop Taster sollte rausgeführt sein. Siehe Bild. Könnte man mit einem BeispielCode auch mal testen. Der PIN muss auf GND gezogen werden. Der PIN hängt über 470K an +5V. Das sollte für das Wemos kein Problem darstellen, man kann einen pin des WEMOS direkt damit verbinden.
Hey Follow2000, das sieht "einfach" aus. Nur schade, dass ich einen Sileno besitze. Viel Spaß beim basteln. Grüße, Felix
Klingt spannend, wird dann der physikalische Stop immer noch funktionieren? Wenn ich das richtig sehe, funktioniert der Stop eher wie ein Totmannschalter, will heißen er ist im Status grün gedrückt und geht auf (unterbricht), wenn er ausgelöst wird. Felix oder Follow2000 könnt ihr mich anweisen, was genau gemacht werden müsste?
Angehängte Dateien:
-

20211214_192750__2_.jpg
140 KB
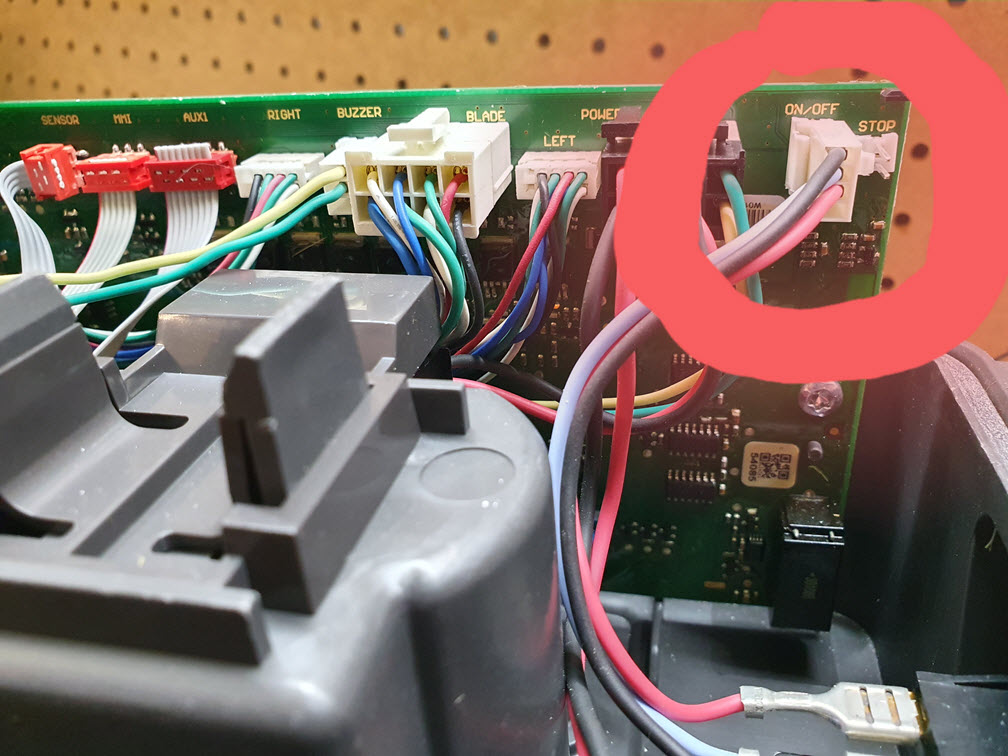
So, heute Abend hab ich den mit "wall-e-esp8266-automower" V1.19 bespielten D1 mini mal probehalber angeschlossen und siehe da: beängstigender weise scheint alles auf Anhieb zu klappen grossefreude. Der Chip ist im WLAN, meldet sich am MQTT, wechselt die Anzeige der Betriebsmodi im Display, zeigt die nächste Startzeit im Webinterface, eine einzige Freude. Vielen Dank an dieser Stelle mal an die Entwickler, wirklich eine super Sache. Dabei ist mir aufgefallen, dass es auch einen freien Stop Steckanschluss auf der Hauptplatine hat. Vielleicht liesse sich der Robi oder die Schnittstelle ja auch über diesen Stecker aufwecken? Hat das schon jemand probiert und wenn nein, wie gehe ich vor, um das gefahrlos zu testen?
Hallo Martin, 2 Posts weiter oben bin ich auf deine Frage schon eingegangen. Gruß Follow2000
Follow2000 schrieb: > Hallo Martin, > > 2 Posts weiter oben bin ich auf deine Frage schon eingegangen. > Gruß > Follow2000 Stimmt sorry, habe das zu wenig genau angeschaut und dachte das sei die Displayplatine. Kann ich um das zu testen die zwei Kontakte einfach aus dem Gehäuse raus ziehen und dann die zwei Kabel zusammenhalten, um einen Test zu machen (besteht da ein Risiko?). Ich gehe davon aus, dass ich den Robi in der Station stehen haben muss und die Abschaltzeit abwarten muss, korrekt? Gehen wir davon aus, das funktioniert. Wie wäre das dann auf dem Board zu realisieren? Wenn ich das richtig gelesen habe, muss ich den oberen Pin der Stopanschlüsse auf dem Mainboard auf einen Pin des D1 Boards verbinden und diesen dann im Code mit z.B. digitalWrite(13, LOW) schalten? Sorry für meine dummen Fragen, aber ich bin leider echt nur auf Nachbauniveau mit ganz wenigen Selbststudiumkenntnissen unterwegs und möchte auf keinen Fall was falsch machen.
Also ich war mal etwas "mutig" und habe die Sache getestet. Bei meinem R40Li BJ 13 lässt sich die Kiste über ein einfaches Verbinden der Stop Kontakte auf dem Mainboard aus dem Dornröschenschlaf wecken. Die 18V liegen übrigens - der Vollständigkeit halber - dauerhaft an, weshalb ich noch einen Downstepper 18 -> 5V bestellt habe und damit den D1 neu indirekt über Pin7 der AUX versorgen werde. Daher noch einmal die Frage, ob mir jemand bestätigen kann, dass ich einfach den oberen Stop Pin mit einem Pin XX auf dem D1 verbinden kann und diesen dann mit digitalWrite(XX, LOW) im Code auslösen kann. Für eine Bestätigung, oder eine Korrektur, wenn das so nicht geht, wäre ich dankbar. Wenn es klappt und ich so wecken kann, wäre meine Feature-Wunschliste komplett.
Da mir keiner bestätigen konnte, dass eine direkte Verbindung zwischen D1 und Stop funktionieren würde und sicher ist, habe ich den von mir aus gesehen sichereren Weg genommen und ein Relay an die Stop pins gehängt, welches ich mit dem D1 ansteuere (klar gäbe es auch bessere elektrische Bauteile, die das können, aber da kenne ich mich schon wieder zu wenig aus). So sind die Stromkreise schön getrennt. Das klappt nun auch alles und ich habe auch im Schlafzustand dauerhaft 5V auf dem D1 und kann somit den Robi aus dem Schlaf wecken. Nun stehe ich aber denke ich am Grundproblem an, an welchem alle vorher ebenfalls gescheitert sind. Nach dem Aufwachen wird der PIN abgefragt und das geht nur über das Keypad und die Display-Platine. Steuerbefehle, werden ohne Pin so wie ich das sehe nicht angenommen. Wenn hier jemand noch eine Hilfestellung zur Lösung dieses Problems bieten kann, wäre ich sehr dankbar. Ansonsten ist das Projekt für mich leider auch am Ende.
Hallo Martin, Interessante Entwicklung!! Ich versuche seit zwei Jahren, ein ESP für die Kommunikation mit meinem Gardena R40Li von 2012 zu bekommen. Leider funktioniert das immer noch nicht. Fragen Sie sich, ob es das Baujahr ist? Ich bin gespannt, aus welchem Jahr Ihre Gardena kommt. Vielen Dank im Voraus! Pieter
Hallo Martín, Die Pinabfrage sollte kein Problem darstellen. Wie der Pin zu senden ist habe ich in der oben verlinkten PDF beschrieben. Das mit dem Relais ist ja erstmal eine gute Lösung. Wie der Eingangspin beschalltet werden muss habe ich oben auch erklärt. Er kann mit einer simplen Lösung aus NPN Transistor z.B. BC337 und einem Basisvorwiederstand geschaltet werden. Wenn du möchtest kann ich dir die einfache Schaltung hier zur Verfügung stellen. Aber erstmal Gratulation, damit hast du nachgewiesen das man den STOP Taster vom Mäher nicht direkt braucht. Jetzt muss man das ganze nur noch elegant in Software umsetzen. Nicht das einer auf die Idee kommt den Mäher immer wieder aufzuwecken. Es macht bestimmt auch Sinn warum Gardena sich gedacht hat den Mäher nach 5 Minuten in den Schlag zu versetzen (Stromverbrauch). Gruß Follow2000
@ Pieter G.: Ich habe einen R40Li von 2013. Ich denke somit müsste deiner baugleich sein. Wo scheiterst du denn? @von Follow2000: Das mit dem PinCode werde ich die nächsten Tage dann mal noch in den Code einbauen, vielen Dank für den Tip. Vielleicht schaffe ich es mit meinen begrenzten Programmierkenntnissen einen neuen Menupunkt im Webinterface einzufüge, über welchen der Pin gleich abgesetzt werden kann. Für den Wakeup habe ich auf jeden Fall einen funktionierenden Webhandle hinbekommen. Die Aufwachfunktion wird ja eigentlich nur benötigt, wenn man dem Robi was neues beibringen will. Also z.B. neue Startzeit oder neuer Arbeitsstatus. Daher würde es ja reichen beim Aufruf des Webinterfaces einmal ein Wake zu machen. Ich habe eh vor die Intelligenz wenn möglich ganz ans HomeAssistant auszulagern, um dort dann regenfreie Mähzyklen auszumachen, die nicht mehr starr an Start und Stopzeiten gekoppelt sind. Dann kann ich gut auch vor einem Start die Sequenz Aufwachen, Pineingabe, Start schicken. Das mit dem Transistor wäre dann ein eleganter Ersatz für mein Relay, korrekt? Also grunsätzlich funktioniert meine Lösung so ja, was wäre der Vorteil vom Transistor? Nicht mechanisch und daher weniger anfällig? Und sicherlich geringerer Verbrauch, da meine Relaybaugruppe ja immer an 5V hängt. Korrekt?
Hallo Zusammen, ich habe den Thread hier nun schon seit einiger Zeit als Gast verfolgt. Ich finde es sehr gut was hier aufgebaut wurde. Vielen Dank an alle Mitwirkenden. Ich habe nun dieses Jahr mich auch an diesem Projekt versucht. Anders als hier empfohlen habe ich ein ESP-01M Modul genommen. Ich habe auch die 1.19 Version raufspielen können. Für die Stromversorgung habe ich den 3V Pin genommen. Der Webserver vom ESP ist erreichbar sobald der Mähroboter seine Arbeit verrichtet. Ich kann ihn auch starten und stoppen über das Webinterface aber ich bekomme kein Response (no response) im Webinterface. Ich kann lediglich die IP, Wifi RSSI und Wifi SSID sehen aber alles andere steht auf 'no response'. Kann jemand von euch mir ein Tip geben woran es liegen kann? Ich habe jetzt zur Sicherheit mal ein Wemos D1 Mini Pro bestellt. VG Mad
Christian M. schrieb: > aber ich bekomme kein > Response (no response) im Webinterface. Ich kann lediglich die IP, Wifi > RSSI und Wifi SSID sehen aber alles andere steht auf 'no response'. Kann > jemand von euch mir ein Tip geben woran es liegen kann? Probier mal RX und TX zu tauschen. Siehe auch Beitrag: Beitrag "Re: Automower G3 mit USB Diagnoseport fernsteuern?" Gruß
Martin G. schrieb: > @ Pieter G.: Ich habe einen R40Li von 2013. Ich denke somit müsste > deiner baugleich sein. Wo scheiterst du denn? Hallo Martin, Die Verbindung der Wemos läuft gut, daran liegt es nicht. Aber es gibt keine Kommunikation zwischen dem Wemos und dem R40Li, also die serielle Verbindung. Der R40Li reagiert auf keine Befehle und ich bekomme auch keinen Status zurück. Kannst du Bilder von den Anschlüssen posten und wie du sie angeschlossen hast? Vielleicht übersehe ich etwas. Vielen Dank im Voraus!
Angehängte Dateien:
-

20220313_192657.jpg
240 KB
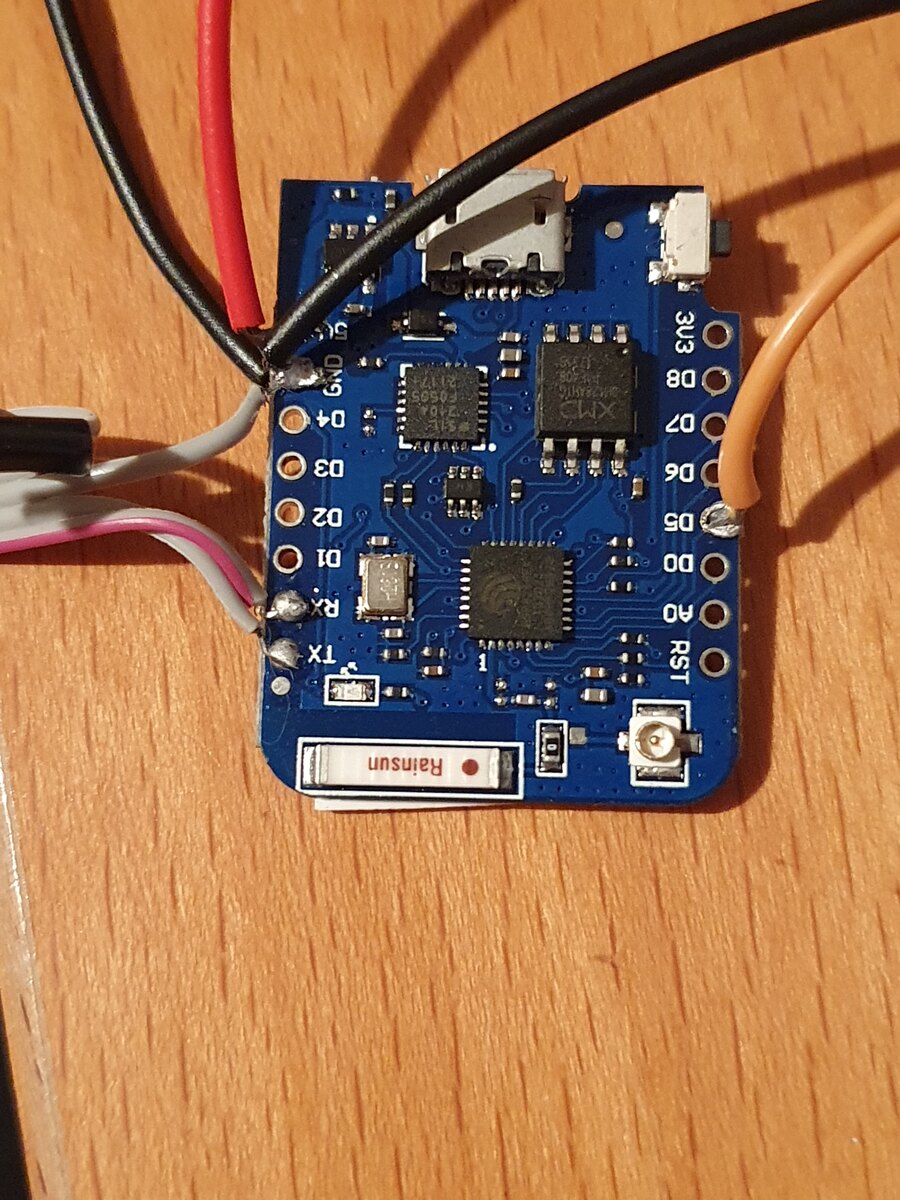
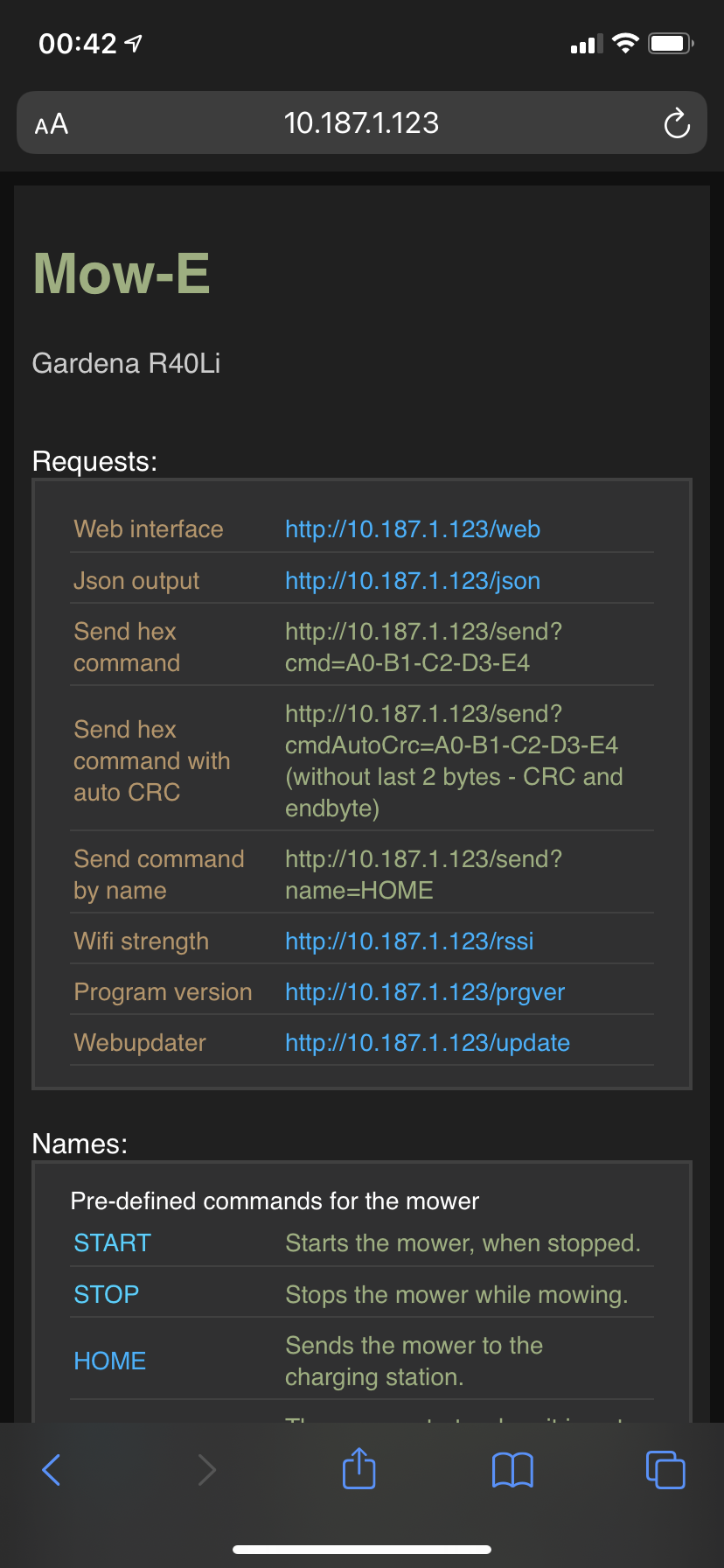{kind=link}
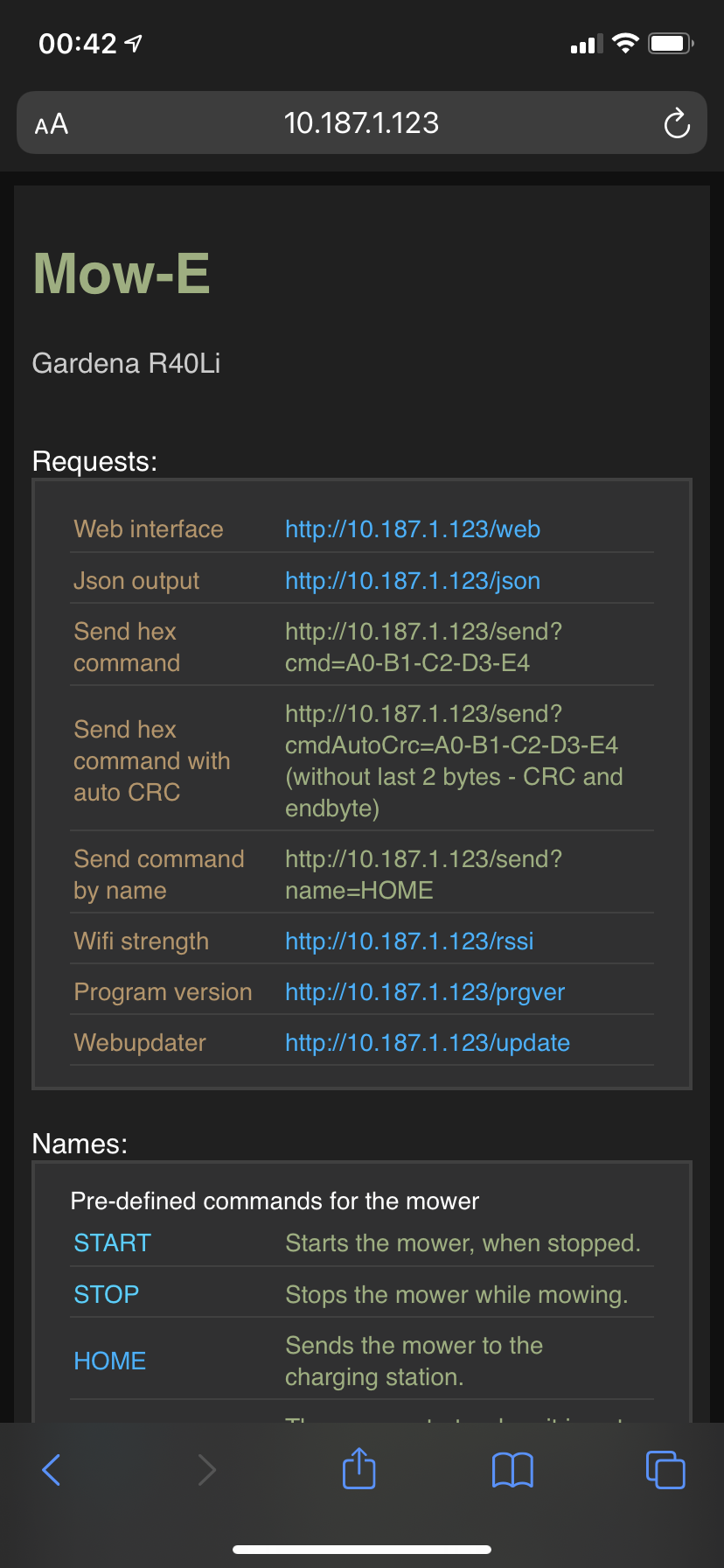{kind=link}
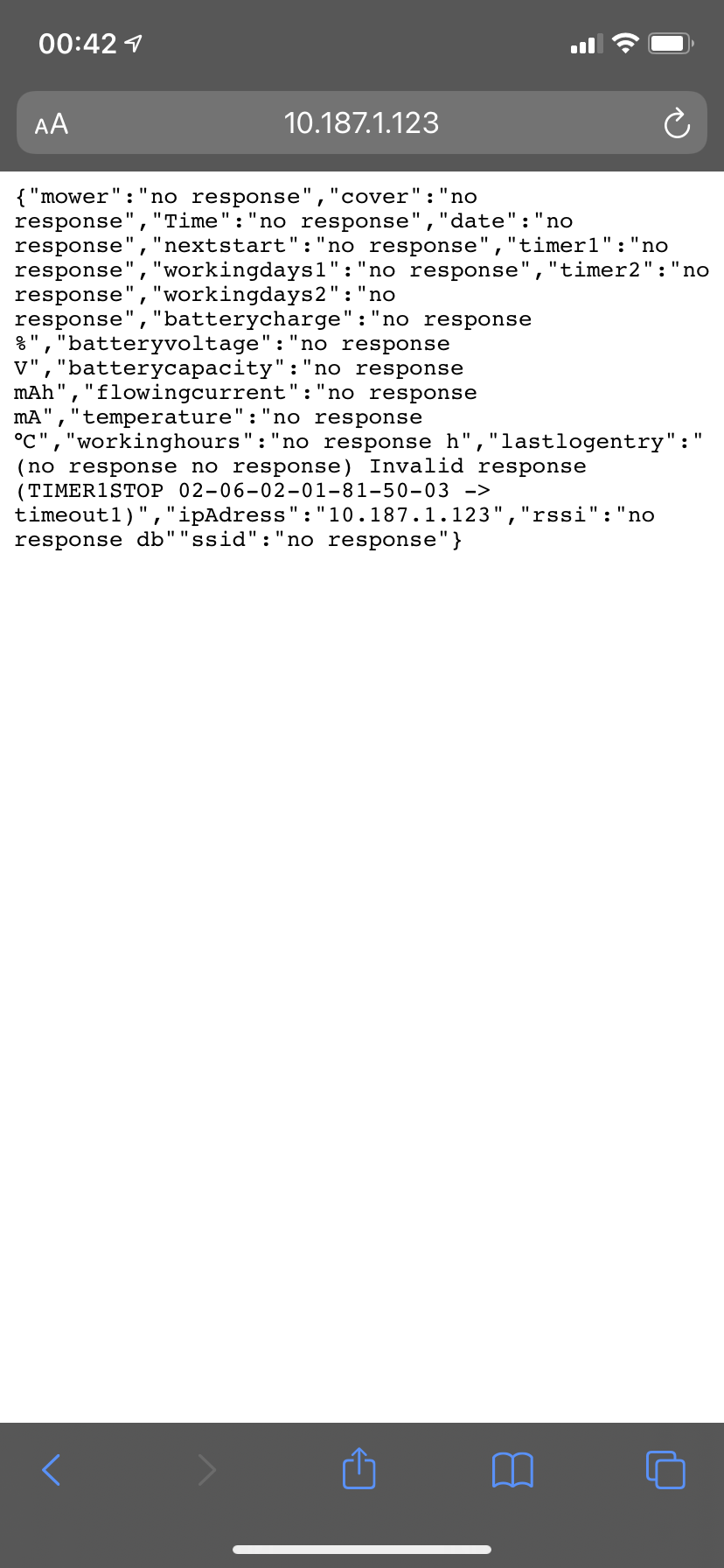{kind=link}
{kind=link}
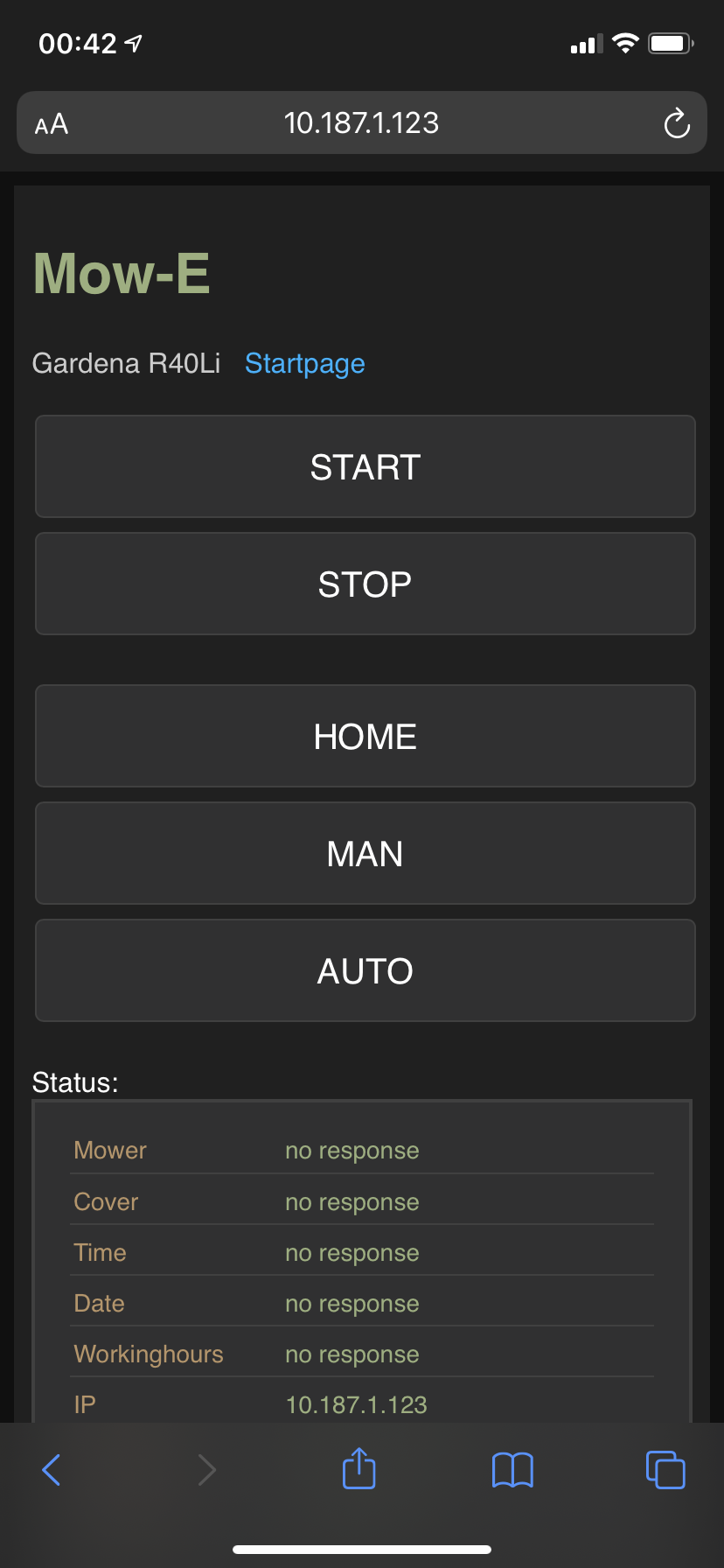{kind=link}
{kind=link}
{kind=link}
@ Pieter G: Hier ein Foto meines Chip. Ich denke deine Beschreibung passt auf vertauschte Tx und Rx Pin, wie oben schon mehrfach beschrieben. Die markierte oberste Ader des Flachbandes geht auf Rx. Lass dich von den zusätzlichen Kabeln bei mir nicht verwirren, die sind zum Relay und Downstepper. Mittlerweile hatte ich auch das mit dem PW hinbekommen und mein Modul eingebaut. Dabei ist mir leider das dünne Kabel mit den 18V auf dem Downstepper abgebrochen. Leider war ich dann zu faul alles noch einmal auszubauen, um sauber löten zu können und habe dann versehentlich die Vin mit Grund verbunden. Was dann beim Einschalten passiert ist brauche ich glaub nicht weiter zu erklären. Mein Robi V1.0 schaut uns nun von oben zu. Zum Glück sind die älteren Robis mittlerweile recht preiswert zu ersteigern, so dass ich rasch einen V2.0 erstehen konnte, der sogar noch 3 Jahre weniger auf dem Buckel hat, aber noch baugleich ist. So habe ich dann auch gleich ein paar Ersatzteile an Lager. Sobald mein neuer D1 mini ankommt (hat es natürlich auch gleich verblasen), mache ich noch einmal einen Einbauversuch.
Hallo Leute! Ich bin begeistert, was ihr hier auf die Beine gestellt habt... Danke auch für die Veröffentlichung eures Projekts via GitLab. Seit ein paar Tagen bin ich dank meines Schwiegervaters auch Besitzer eines Automowers - allerdings eines G2... Daher die Frage: ist es möglich, den Code auf G2 zu backporten? Würde es reichen, die Commands umzuschreiben? Muss nämlich über das WebInterface arbeiten, da HomeAutomation aktuell nicht im Bereich des WAF liegt... Geplant wäre es, einen WEMOS D1 Pro 4 MB mit externer Antenne zu nutzen (0Ohm Resistor umlöten ist klar). Ich bin aber leider programmiertechnisch nicht der Beste :-( Any hint appreciated...
Daniel D. schrieb: > Christian M. schrieb: >> aber ich bekomme kein >> Response (no response) im Webinterface. Ich kann lediglich die IP, Wifi >> RSSI und Wifi SSID sehen aber alles andere steht auf 'no response'. Kann >> jemand von euch mir ein Tip geben woran es liegen kann? > > Probier mal RX und TX zu tauschen. Siehe auch Beitrag: > Beitrag "Re: Automower G3 mit USB Diagnoseport fernsteuern?" > > Gruß Hallo Daniel, ich habe nun einen neuen Wemos D1 Mini genommen und ihn entsprechend verkabelt 1(rot/grau)>RX; 2>TX; 3>GND und 6>5V. Mit dieser Verkabelung kann ich den Robi ansteuern. Sprich START, STOP,HOME, AUTO und MAN funktionieren. Leider bekomme ich aber kein Response. Immer timeout1. Scheinbar empfängt er nichts.
1 | bool WaitforSerial(unsigned int bytes, unsigned int timeout) |
2 | {
|
3 | unsigned long now = millis(); |
4 | |
5 | while ( (millis() - now) < timeout) |
6 | {
|
7 | if (Serial.available() >= bytes) |
8 | return true; |
9 | server.handleClient(); |
10 | }
|
11 | return false; |
12 | }
|
13 | |
14 | String ReadSerialResponse(String name) |
15 | {
|
16 | if (DebugOn) |
17 | return GetTestResponse(name); |
18 | |
19 | String response = ""; |
20 | String separator = "-"; |
21 | |
22 | if (!WaitforSerial(3, 1000) ) return ("timeout1"); // wait for first 3 bytes to come |
23 | |
24 | response = int2hex(Serial.read(), 2); // start byte |
25 | response += separator + int2hex(Serial.read(), 2); // command byte |
26 | char payload = Serial.read(); |
27 | response += separator + int2hex(payload, 2); // length |
Wenn ich RX und TX vertausche, kann ich den Robi nicht mal mehr ansteuern. Kann es sein das RX vielleicht bei manchen Modellen woanders liegt?
Moin, zuerst möchte ich sagen, dass ihr tolle Arbeit geleistet habt!! Ich bin begeistert. Ich wollte meine Garden R40li mit diesen tollen Feature ausstatten. Leider bin ich gegen ein Problem gestolpert. Ich benutze esp8266 auf einem wemos d1 mini pro board. Den Code lade ich v1.19. Und... Ich bekomme no response auf dem Roboter. Egal ob er lädt or mäht etc. Dazu habe ich versucht das Board mit 5v zu betreiben, kein Erfolg, auch 3.3v kein Erfolg. RX und TX getauscht auch nix. Der serwer durch http funktioniert so vielleicht eine Minuten nach dem Reset.Danach keine Antwort obwohl der Router zeigt weiterhin Verbindung. Ich habe versucht ohne mqtt und ohne Automation und der serwer ist weiterhin erreichbar, aber ganze Zeit no response aus dem Mäher. Ich glaube ich habe echt alles was hier erwähnt wurde versucht. Kein Erfolg. Was kann. Ich noch machen? Ich bin gespannt auf eure Antworten. MfG Jakub
Jakub L. schrieb: > Moin, zuerst möchte ich sagen, dass ihr tolle Arbeit geleistet habt!! > Ich bin begeistert. Ich wollte meine Garden R40li mit diesen tollen > Feature ausstatten. Leider bin ich gegen ein Problem gestolpert. > Ich benutze esp8266 auf einem wemos d1 mini pro board. > Den Code lade ich v1.19. > Und... > Ich bekomme no response auf dem Roboter. Egal ob er lädt or mäht etc. > Dazu habe ich versucht das Board mit 5v zu betreiben, kein Erfolg, auch > 3.3v kein Erfolg. RX und TX getauscht auch nix. > Der serwer durch http funktioniert so vielleicht eine Minuten nach dem > Reset.Danach keine Antwort obwohl der Router zeigt weiterhin Verbindung. > Ich habe versucht ohne mqtt und ohne Automation und der serwer ist > weiterhin erreichbar, aber ganze Zeit no response aus dem Mäher. > Ich glaube ich habe echt alles was hier erwähnt wurde versucht. Kein > Erfolg. > Was kann. Ich noch machen? > Ich bin gespannt auf eure Antworten. > MfG > Jakub Hallo Jakub, So erkennbar, ich habe dieses Problem seit einem Jahr. Ich komme damit nicht weiter, habe immer noch nicht die Lösung gefunden... Ich hoffe, Sie finden es und können es hier teilen. Ich habe einen 2012 R40Li Danke, Pieter
Christian M. schrieb: > Kann es sein das RX vielleicht bei manchen Modellen woanders liegt? Hallo, habt ihr mal geschaut, aus welchem Baujahr die Mähroboter sind? Robonect bietet auch Einbausets an - dort wird nach Modellen vor 2016 und ab 2016 unterschieden: https://www.robonect-shop.de/shop/robonect-hx/ Ich selbst habe eine 2016er Version, bei der es funktioniert - siehe auch Beitrag: Beitrag "Re: Automower G3 mit USB Diagnoseport fernsteuern?" Eventuell gab es ja Änderungen an der Beschaltung... Gruß
Ich habe herausgefunden, dass es eine ältere Version von Code gibt. Ich habe v1.15 heruntergeladen und es hat funktioniert. Nun wäre es schön, wenn es auch v1.19 funktioniert hatte. Das ist dann doch kein Hardware Problem sondern Software. Hat jemand vielleicht 1.18 oder 1.17 auf seinem Rechner und konnte hier frei geben für Download? MfG Jakub P.S. ich habe einen 2016 mower und sogar einen für meine Tante mit ganz andere Platine 2017.
Jakub L. schrieb: > Hat jemand vielleicht 1.18 oder 1.17 auf seinem Rechner und konnte > hier frei geben für Download? Hallo, der Code inklusive aller Release-Versionen liegt in GitLab: https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/tags Hier sind die weiteren Versionen - wäre super, wenn du testen kannst, ab welcher Version es bei dir nicht mehr funktioniert: * V1.15: https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/tags/v1.15.0 * V1.16: https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/tags/v1.16.0 * V1.17: https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/tags/v1.17.0 * V1.18: https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/tags/v1.18.0 Gruß
Daniel D. Vielen Dank für Links. Ich konnte irgendwie die Daten auf GitHub nicht finden. Keine Ahnung warum. Nur 1.14 und 1.19 war zum downloaden. Ich habe endlich die v1.19 zum laufen gebracht. Ich musste die mqtt auskommentieren, dann hat es funktioniert. Ich habe noch eine Frage, hat Jemand versucht, ob es mit Modellen über 2016 Baujahr funktioniert? Mit diesen großen schwarzen Stecker für Tastatur und LCD? MfG Jakub
Moin, ich habe jetzt eure v 1.20 ausprobiert. Problem liegt lider in MQTT. Wenn ich den MQTT anschalte, funktioniert er nicht. Zusätzlich funktioniert auch die WEBßOberfläche nicht richtig. Z.B. gehen die Arbeitsstunden verloren als auch die %Satz von Batterie. Warum ist es so?? MfG Jakub
Felix schrieb: > Und wie gesagt, die 18V stehen immer an. Wie ist das in de Winterpause? Batterie entladen im Frühjahr ? --Thomas
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.