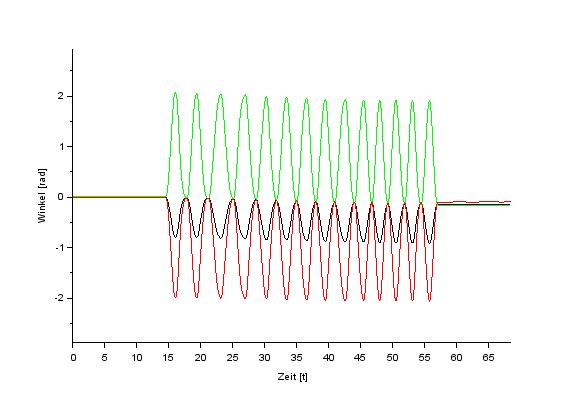
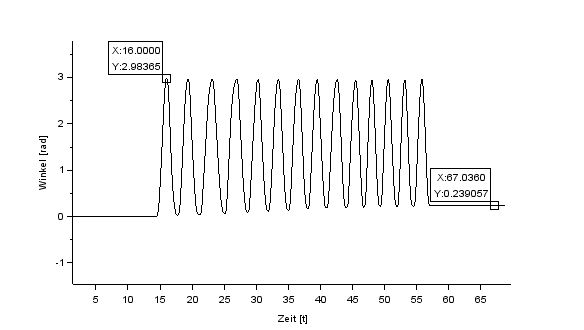
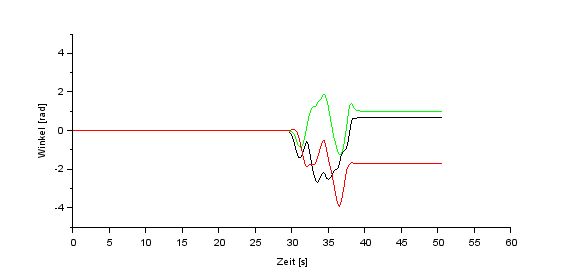
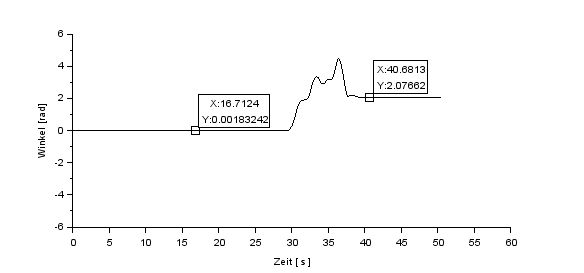
Hallo, Ich möchte für kurze Zeit die Lage meines Gerätes im Raum bestimmen. Die Zeit ist so kurz, dass Offset-Fehler keine Rolle spielen. Ich habe ein massives Problem beim Auswerten meiner Giro-Daten und mir ist absolut nicht klar ob das Problem: ⦁ in meinem Software steckt ODER ⦁ durch meinen Sensor verursacht wird ODER ⦁ an meinem fehlerhaften math. Verständnis liegt Drehe ich meine IMU definiert um EINE(!!!) beliebige Achse und an- schließend wieder auf gleichem Weg in die Ausgangslage zurück, dann ist das Integral der Drehrate über die Zeit praktisch gleich Null (siehe Diagramm Winkel_XYZ.gif bzw. Winkel_Summe.gif). Drehe ich die IMU jedoch chaotisch um mehrere Achsen und wieder in die Ausgangslage zurück, kommt beim Integrieren nur Blödsinn raus. (siehe Diagramm Winkel_XYZChaotisch.gif bzw. Winkel_SummeChaotisch.gif). Müsste dann nicht auch Null bei rauskommen? Kann mir hier jemand weiterhelfen? Habe ich ein Problem mit der Mathematik oder mit meiner Hardware oder beidem? Diagramme: Die Diagramme zeigen einmal die Drehraten der X-, Y- und Z-Achse und die geomtrische Summe jeweils für die Drehung um eine Achse bzw. um mehrere Achsen. Testaufbau Ich verwende die MPU 9150 von InvenSense. Die Daten werden mit 5 Hz in einen FIFO geschrieben. Der Range ist +/- 250 Grad/s. Wenn Daten im FIFO stehen liest ein kleiner PIC die Daten und sendet sie über RS232 an einen PC, der sie aufzeichnet. Die IMU wird so langsam gedreht, dass die Drehrate garantiert innerhalb der Ranges bleibt. Viele Dank
Angehängte Dateien:
-

Winkel_XYZ.gif
9,1 KB -

Winkel_Summe.gif
6,8 KB -

Winkel_XYZ_chaotisch.gif
3,3 KB -

Winkel_SummeChaotisch.gif
3,6 KB
5Hz ist zu langsam wenn die Drehgeschwindigkeit nicht konstant ist. Zwischen den sample punkten inkonstante Drehgeschwindigkeiten "verpasst" du dadurch. Für meinen quadcopter sample ich mit 100 Hz und errechne auch mit 100 Hz meine Lage neu. Das schafft der atxmega mit 32 MHz ohne Probleme und das in (Software) float
Sie haben ein Mathematisches Problem. Wenn du wirklich alle Achsen verdreht, darfst du nicht mehr einfach jeden einzele Achs separat integrieren ! Du brauchst dan etwas mehr Math : Stichwort Quaternionen, 3D IMU usw.
Quaternionen braucht es dafür nicht. Das ist einfach nur eine andere Art der Darstellungsweise. Quarternionen verhindern vielleicht einen Gimbal Lock, ersetzen aber keinen Filter Algorithmus (Kalman, PID etc). Natürlich kann es sein, dass sein Algo oder die Testprozedur irgendwie probs mit Gimbal Lock oder sowas hat, aber ich bleib dabei das 5 Hz einfach zu wenig für eine saubere IMU sind. Man verpasst einbfach zu viele Momentanwerte der Drehraten einfach, sodass der aufintegrierte Winkel einfach nicht stimmen kann. 100 Hz sollten es schon sein, das ist auch mit einfachen µCs heutzutage kein Problem mehr. Da habe ich auch bei schnellen Bewegungen (ohne Quaternionen, Kalman oder sonstiges, sondern einfach nur einfachen PID mit 1% Accelerometer und Magnetometer Anteil) absolut keine Probleme.
Ich hatte vergessen, zu erwähnen, dass die Daten von der IMU mit 1 KHz gesampled werden und durch ein digitales Tiefpassfilter mit 5Hz Grenzfrequenz laufen. Die IMU wirft dann mit 5Hz die Daten raus. Wegen dem Tiefpass ging ich davon aus, dass 5Hz schnell genug sind. Ich probiere jetzt die Quaternionen irgendwie vorm Integrieren einzubauen, aber ich weiß halt noch nicht wie.
Es liegt an den konstanten Drift von Gyroskop, der immer weiter integriert wird. Wenn du das Gyroskop auf dem Tisch stellst, steigt der Winkel an. Sodass müsst du den Drift bestimmen, indem du FIR ARX Filter am besten Zustandsbeobachter wie Kalman Luneberger High Gain einsetzt. Wenn du den IMU nicht im Kleinsignal-Bereich einsetzt, müsst du dich wohl um die Singularität kümmern, das geht wie oben erwähnt mit Quaternionen.
Erst sollte man realisiert haben, dass Rotationen nicht permutieren. Dh man kan einzelrotationen nicht vertauschen. Speziell weil solche Rotationen im eigenen Koordinatensystem ablaufen. Aber auch wenn Rotationen im globalen System beschrieben werden kann man sie nicht vertauschen. Deswegen muss man die Dreh-Position als Ganzes mitfuehren.
Oder D. schrieb: > Erst sollte man realisiert haben, dass Rotationen nicht permutieren. Dh > man kan einzelrotationen nicht vertauschen. Genau so ist es. Das Stichwort lautet Strapdown-Algorithmus. Dieser löst genau dein Problem. Ein Buch das ich zu diesem Thema empfehlen kann ist "Integrierte Navigationssysteme" von Jan Wendel.
Genaugenommen geht es um die (näherungsweise, zeitdiskrete) Lösung der Eulerwinkeldifferentialgleichungen:
Phi, Theta und Psi sind dabei Roll-, Pitch- und Yaw-Winkel der IMU. Omega ist die Drehrate der IMU (plus Erddrehrate etc.). Wie man sieht sind die DGLs nichtlinear und verkoppelt. Man sieht auch schön, dass bei 90° Pitch eine Singularität auftritt: der Nenner der 3. Gl. wird null. Die Lage kann per Eulerwinkel zwar noch dargestellt, aber die DGLn nicht mehr eindeutig gelöst werden. Die Lösung der DGLn erfolgt durch Umrechnung in Orientierungsvektoren bzw. Quaternionen. Es sei hier auf das Kapitel 3.3.1 des o.g. Buches verwiesen. In der Originalquelle "Strapdown Inertial Navigation Technology" von Titterton sollte das ebenfalls zu finden sein. In diesem Video: https://www.youtube.com/watch?v=C7JQ7Rpwn2k geht es ebenfalls um ziemlich genau das Thema, aber wenn ich mich recht erinnere werden keine konkreten Berechnungsvorschriften gegeben.
Angehängte Dateien:
-

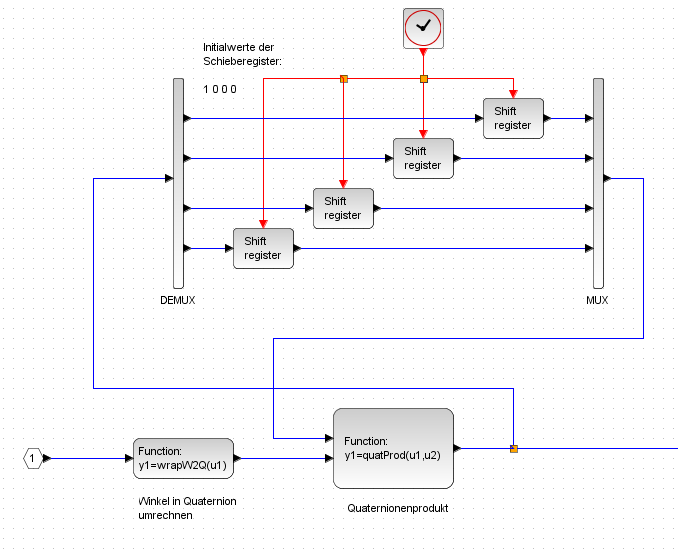
ScilabModel.PNG
23 KB -

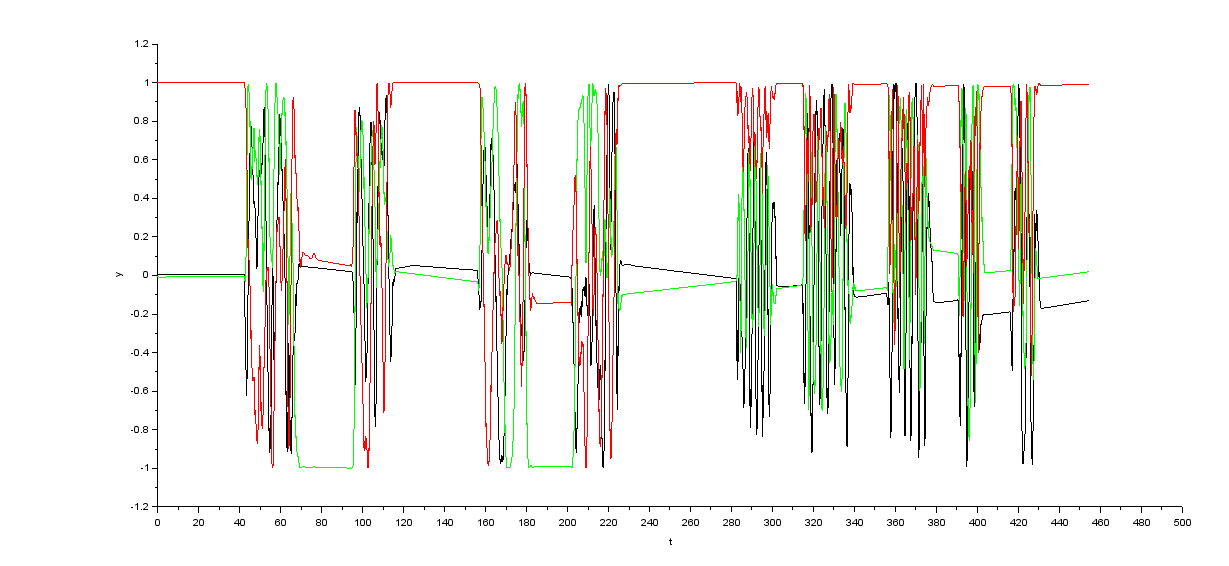
ScilabPlot.PNG
11 KB
{kind=link}
{kind=link}
{kind=link}
{kind=link}
RP6conrad schrieb: > Sie haben ein Mathematisches Problem. Wenn du wirklich alle Achsen > verdreht, darfst du nicht mehr einfach jeden einzele Achs separat > integrieren ! Du brauchst dan etwas mehr Math : Stichwort Quaternionen, > 3D IMU usw. Ich hatte wohl ein mathematisches Problem. Der im ersten Diagramm dargestellte Algorithmus integriert die Drehrahten richtig. Er arbeitet wie folgt: Zuerst wird aus den 3 Winkeln ein Quaternion gebildet Diese Quaternion wird mit einem Quaternion, das die Ausgangslage zm Zeitpunkt t - 1 repräsentiert, multipliziert. Initial hat dieses Quaternion den Wert [1 0 0 0], was keiner Drehung entspricht. Das Ergebnis der Quaternionenmultiplikation ist die neue Lage undwird in den Schieberegistern für den nächsten Zeitschritt gespeichert. Das Diagramm ScilabPlot zeigt einen Vector mit Ausgangslage in X-Richtung der wild gedreht wird, dann 90° gedreht abgelegt, wieder wild gedreht, wieder abgelgt wird usw. Prinzipiell wird die Drehung richtig integriert. Der Algorithmus ist so erweitert, dass er die Erdbeschleunigung nutzt, im die Drift um X- und Y-Achse zu korrigieren, Z-Achse wird nicht korrigiert. Deshalb liegen Y- und Z- nach 440 Sekunden(!) nicht mehr bei 0. @ RP6conrad, Danke für den Tip. Ich denke der war richtig.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.