Hallo, im Prinzip hatte ich früher viel mit Prozessoren programmiert, Z80, 6809, bitslice2901 in Assembler, etwas C. Schwierigkeiten machen mir die Handbücher und die Entwicklungsumgebung. Laufende Programme neu crossassemblen oder compilieren nach Erweiterungen war nie ein Problem. Teilweise auf "mainframe SDS" mit Lochstreifeneingabe für das zu assemblierende Programm und Bändern für das Betriebsystem, bootstraploader mit Kippschaltern starten usw. Jetzt möchte ich den PIC10F200 für ein einfache Zeitverzögerung eisnsetzen: Beschreibung mit bestimmt falscher Syntax: Kommentar, 2 asynchron unabhängige Eingänge sollen wenn beide mal Ereigniss waren einmal den Ablauf mit Ausgang 1 und Ausgang 2 auslösen, Wenn beides passierte erst nach 3200ms wieder neu auf Ereigniss warten. loop und eingang 1 setze bit 1 und eingang 2 setze bit 2 bit 1 und bit 2 setze bit 3 undnicht bit 3 goto end warte 2000ms setze ausgang 1 warte 1000ms setze ausgang 2 warte 200ms reset bit 1 reset bit 2 reset bit 3 reset ausgang 1 reset ausgang 2 end: goto loop Wer kann mir helfen den PIC entsprechend zu versorgen, auch interne Taktgebung, Zeitparametrierung usw. Wie rufe ich Beblothekfunktionen auf um die Timer verfügbar zu habnen
In welcher Sprache willst du programmieren ? Welcher Compiler willst du benutzen ? Was kannst du ?
Ich zweifel daran, dass es überhaupt Compiler für so kleine PICs gibt. Du müsstest das in Assembler programmieren. Und Bibliotheksfunktionen... vergiss es. Das schreibt sich am einfachsten und schnellsten selber. Wie genau müssen die Timings stimmen? Eventuell reicht ja der interne 4MHz Oszillator.
Hallo, ich habe die MPLAB IDE 2.30 installiert, habe die Programmieradapter und auch c-compiler und Assemblerpakete von MPLAB. Assembler oder C, im Prinzip egal. Wie geschrieben die Logik einer CPU usw. ist mir klar, mir fehlt es an dem "garnieren" ( zuweisen ob I, O oder analog in oder out, wie heissen die Bits oder Bytes im RAM ) so daß der Prozessor rundlaufen würde mit dem comolierten oder assmblierten programm. Fertige Programme auch strukturiert aufblasen, davor habe ich keine Angst. Zeitfunktionen, dafür gibt es doch bestimmt makrobefehle, nicht das ich eine Schleife abwärtzähend programmieren müsste und die durchläufe zählen bis zerobit und jump if zero, gar mit Dopppelwort 32bit
Hallo, klar der interne Takt wäre mehr als ausreichend genau, ob 2s, 1,5s, oder 3s im Prinzip egal. Biblotheken, auch nicht für Banalitäten wie Zeitverzögerung in Assemblerprogrammen? Für den 6809 hatten wir vor 25 Jahren Biblotheken, also fertige Unterprogramme mit integer-mathematik sqr, sin, tan für word und doppelwort, sin und tan nominiert auf n/2exp16 oder n/2exp32 sin 89,999° = 7FFF oder 7FFFFFFF
>Für den 6809 hatten wir vor 25 Jahren Biblotheken, also fertige >Unterprogramme mit integer-mathematik sqr, sin, tan... Naja, der PIC10F200 ist der kleinste PIC, den es gibt. Der hat Platz für 256 Instruktionen und auch nur 16 Byte RAM - mehr nicht. Das Programm zu schreiben ist nicht schwer. Du kannst zum Beispiel GPIO einlesen, die Ausgänge mit AND verwerfen, dann den Bitcode für die Eingänge davon subtrahieren und testen, ob das Zero Flag gesetzt ist. Wenn nicht, dann springe an den Anfang. Falls doch, dann setze die Ausgänge entsprechend. Es gibt aber noch einige Fallstricke: Zum Beispiel musst du den Reset (MasterClear) als Eingang konfigurieren. Dadurch kannst du den nur durch die Versorgungsspannung resetten.
Um Energie zu sparen könntest du auch Wake-Up on Pin Change benutzen. Ob Ein- oder Ausgang definierst du mit dem TRIS register. Lesen und Schreiben kannst du dann mit dem Port GPIO. Davor solltest du den Comparator deaktivieren. Die restlichen Dinge werden über die Konfigurations-Bits gesteuert. Diese werden beim Programmieren beschrieben. Die ganzen Registernamen und -adressen findest du alle im Datenblatt.
Sebastian Hepp schrieb: > Ich zweifel daran, dass es überhaupt Compiler für so kleine PICs gibt. Geht super. http://www.ccsinfo.com/content.php?page=compilers
Sebastian Hepp schrieb: > Ich zweifel daran, dass es überhaupt Compiler für so kleine PICs gibt. Gibt es. Um die Kollegen zu Weihnachten mit einer Lichtbastelei zu erfreuen, habe ich letztes Jahr mit einer einzelnen APA 102 ein batteriebetriebenes "Regenbogenlicht" gebaut. Selbst die gekrippelte kostenlose Version des XC8 belegt für Umrechnung HSV -> RGB, Ansteuerung einer APA 102 per SPI usw. nur 366 Worte Code und 16 Bytes RAM. Vom RAM her wuerde es also sogar in einen 10F200 hineinpassen. Da der 202 z.B. bei Reichelt aber sogar billiger ist (50 Cent) als der 200 (58 Cent), hatte ich aber nur ein paar von ersteren rumliegen. > Du müsstest das in Assembler programmieren. Kaum. Ich habe aufgrund des auf zwei Level beschraenkten Stacks ziemlich tricksen muessen was den Code ziemlich aufgeblaeht hat. Eine simple Ablaufsteuerung duerfe erheblich kompakter ausfallen. > Und Bibliotheksfunktionen... > vergiss es. Das schreibt sich am einfachsten und schnellsten selber. > > Wie genau müssen die Timings stimmen? Eventuell reicht ja der interne > 4MHz Oszillator. Die PIC sind mit dem internen Oszillator erstaunlich genau. Microchip verspricht unter normalen Bedingungen +- 1%.
Hallo, ich programmiere meine 10F2xx mit: http://www.oshonsoft.com/pic10.html geht prima, mit der Demoversion kann man allerdings nur 10 Programmstarte machen, aber hat für mein erstes Projekt längstens gereicht! Weil es einfach auf Anhieb lief! Gruss Chregu
Immer diese Zweifler ... Es gibt mehr als genug C-Compiler für die kleinen und kleinsten PICs. Der CC5X wurde noch nicht genannt, hat bisher bestens funktioniert. http://www.bknd.com/cc5x/index.shtml
Sebastian Hepp schrieb: > Ich zweifel daran, dass es überhaupt Compiler für so kleine PICs gibt. Zumindest für die pinkompatiblen ATtiny10 von Atmel gibt es das AVR-Studio mit C-Compiler. Ich benutze auch für kleinste Projekte nur noch C, weil es viel bequemer ist. Ich kann z.B. für Timer die Formel für den Comparewert für eine Zeitdauer bei einer bestimmten Taktfrequenz direkt hinschreiben und der Compiler rechnet es für mich aus. Oder ich nehme delay_us, delay_ms, wenn die Task eh nichts anderes tun muß. Allerdings sind mir die SOT-23/6 zu winzig zum Löten und ich nehme lieber die SO-8 (ATtiny25).
Doch, den 10F200 kann man in C programmieren. Der wird in MPLABx unterstützt. Als Compiler geht der XC8. Möglicherweise braucht man einen Debug-Header, aber da kann dir das Manual mehr sagen. Ob das was gescheites wird, weiß ich aber nicht. Aber eine simple Zeitverzögerung sollte man doch hinbekommen. Ich würde dazu nicht einmal einen Timer nehmen, sondern einfach diese delay() makros. Dann sind das wenige Zeilen. PS: Ich persönlich würde mindestens den 10F320 empfehlen, der ist moderner und hat auch nur 6 Haxen.
Hallo, in meiner Unwissenheit habe ich schon ein paar 10F200 gekauft. Ich wiederhole meine Bitte nochmals was muß im C-Programm ( oder Assembler ) am Programmanfang gesetzt werden für internen Takt, watchtdog aus ( daß der stören kann las ich ). 2 Pin als Eingang, welche wie? pullup,pulldown intern, extern? 2 Pin als Ausgang, welche wie? pullup,pulldown intern, extern? Timergrundfunktionen um den Befehl "delay mit ungefähr Millisekunden anweden zu können 20% mehr oder weniger wären egal . Die Assmbler- oder C-Programmstruktur der Anwendug als Schleife, die macht mir keine Schwierigkeiten. Grüsse
Wolfgang S. schrieb: > Die Assmbler- oder C-Programmstruktur der Anwendug als Schleife, die > macht mir keine Schwierigkeiten. Dann bin ich überzeugt das Du es schaffts die passenden Register und Bitmuster mit Hilfe des Datenblattes zu finden und zu setzen. Geht sogar noch kompfortabler mit: MPLAB XC8 C Compiler User's Guide 5.3.5 Configuration Bit Access Ein wenig must Du Dich schon mit Toolchain und Device beschäftigen um weiterzukommen.
Wolfgang S. schrieb: > Ich wiederhole meine Bitte nochmals > was muß im C-Programm ( oder Assembler ) am Programmanfang gesetzt > werden Für Assembler gibt es Templates im installationsordner von MPLABX ...\Microchip\MPLABX\v3.20\mpasmx\templates\Object\10F200TMPO.ASM
1 | ;********************************************************************** |
2 | ; This file is a basic code template for object module code * |
3 | ; generation on the PIC10F200. This file contains the * |
4 | ; basic code building blocks to build upon. * |
5 | ; * |
6 | ; Refer to the MPASM User's Guide for additional information on * |
7 | ; features of the assembler and linker. * |
8 | ; * |
9 | ; Refer to the respective PIC data sheet for additional * |
10 | ; information on the instruction set. * |
11 | ; * |
12 | ; * |
13 | ;********************************************************************** |
14 | ; * |
15 | ; Filename: xxx.asm * |
16 | ; Date: * |
17 | ; File Version: * |
18 | ; * |
19 | ; Author: * |
20 | ; Company: * |
21 | ; * |
22 | ;********************************************************************** |
23 | ; * |
24 | ; Files required: P10F200.INC * |
25 | ; * |
26 | |
27 | ;********************************************************************** |
28 | ; * |
29 | ; Notes: * |
30 | ; * |
31 | *
|
32 | ;********************************************************************** |
33 | |
34 | list p=10F200 ; list directive to define processor |
35 | #include <p10F200.inc> ; processor specific variable definitions |
36 | |
37 | __CONFIG _MCLRE_ON & _CP_OFF & _WDT_OFF |
38 | |
39 | ; '__CONFIG' directive is used to embed configuration word within .asm file. |
40 | ; The lables following the directive are located in the respective .inc file. |
41 | ; See respective data sheet for additional information on configuration word. |
42 | |
43 | |
44 | ;***** VARIABLE DEFINITIONS |
45 | TEMP_VAR UDATA |
46 | temp RES 1 ;example variable definition |
47 | |
48 | |
49 | |
50 | ;********************************************************************** |
51 | RESET_VECTOR CODE 0xFF ; processor reset vector |
52 | |
53 | ; Internal RC calibration value is placed at location 0xFF by Microchip |
54 | ; as a movlw k, where the k is a literal value. |
55 | |
56 | MAIN CODE 0x000 |
57 | movwf OSCCAL ; update register with factory cal value |
58 | |
59 | |
60 | start
|
61 | nop ; example code |
62 | movlw 0xFF ; example code |
63 | movwf temp ; example code |
64 | |
65 | ; remaining code goes here |
66 | |
67 | |
68 | END ; directive 'end of program' |
C Code findet man meistens in den kleinen Entwicklungskits. Für den 200er weiß ich jetzt keines, aber ich habe ein PIC10F32x Development Board (AC103011) Da gibt es dann auch ein kleines MPALBX Projekt für den XC8 dazu. Selber habe ich aber Assembler benutzt. PS: Wenn du nur "eine Handvoll" 200er gekauft hast und du nie große Stückzahlen haben wirst, dann leg die irgendwohin (Müll) und kauf dir 10F320 oder 10F322
Wolfgang S. schrieb: > in meiner Unwissenheit habe ich schon ein paar 10F200 gekauft. Man kann das sportlich sehen und schauen, wie weit man damit kommt. Wie viele hast Du denn gekauft und womit hast du vor, diese 10F200 zu programmieren aka "flashen"? > > Ich wiederhole meine Bitte nochmals > was muß im C-Programm ( oder Assembler ) am Programmanfang gesetzt > werden Gegenvorschlag. Du schriebst, Du könntest "etwas C". Dann liefere doch mal das C-Programm ohne den Programmanfang, statt dieser mehrdeutigen Beschreibung des Ablaufs im Anfangsposting. Ich ergänze das dann gerne um die für den 10F200 noch fehlenden Initialisierungen für den kostenlosen XC8-Compiler von Microchip und verrate Dir sogar, wieviel ROM und RAM der dafür benötigt. Bedanke aber, daß der 10F200, wie ich bereits anmerkte, nur zwei Stacklevel beherrscht. Hilfreich wäre auch ein Schaltplan und/oder eine Präzisierung, welche der Pins des 10F200 für die beiden Inputs und beiden Outputs verwendet werden sollen. > > für internen Takt, > watchtdog aus ( daß der stören kann las ich ). > 2 Pin als Eingang, welche wie? pullup,pulldown intern, extern? Wenn Du nicht weißt, was Du willst oder brauchst, sehe ich schwarz. Was soll denn konkret an die Eingänge bzw. Ausgänge angeschlossen werden? > 2 Pin als Ausgang, welche wie? pullup,pulldown intern, extern? > Timergrundfunktionen um den > Befehl "delay mit ungefähr Millisekunden anweden zu können 20% mehr oder > weniger wären egal . Das ist doch schon mal eine Aussage. Der interne Oszillator des 10F200 ist, wie ich bereits schrieb, unter vernünftigen Betriebsbedingungen ca 1% genau. > > > Die Assmbler- oder C-Programmstruktur der Anwendug als Schleife, die > macht mir keine Schwierigkeiten. Das wäre noch zu zeigen. Wie gesagt, liefere die besagte Schleife als C-Schnipsel, dann kann man weitersehen.
Hallo, so stelle ich mir das C-Programm für den 10F200 vor. Gruß wolfgang /* Automatische Zugkreuzung an einleisiger Strecke mit PIC 10F200. Egal welcher Zug als erster im Bahnhof ist, erst wenn beide eingefahren sind gibt es freie Ausfahrten 5s später in 1,2s Abstand */ void setup() { pinMode(Pin4, OUTPUT); // Ansteuerung Ausfahrtsignal 2 pinMode(Pin3, OUTPUT); // Ansteuerung Ausfahrtsignal 1 pinMode(Pin2, INPUT); // Zugerkennung 2 pinMode(Pin1, INPUT); // Zugerkennung 1 int Zug1 = 0; // Variabele1 merkt wenn Zug 1 angekommen int Zug2 = 0; // Varaibele2 merkt wenn Zug 2 angekommen int Zug1u2 = 0; // Varaibele3 merkt wenn beide Züge angekommen sind } // Schleife beginnt hier. void loop() { if (Pin1 == HIGH) { Zug1 == TRUE; } if (Pin2 == HIGH) { Zug2 == TRUE; } if (Zug1 && Zug2 == TRUE) { Zug1u2 == TRUE; // Beide Züge sind im Bahnhof angekommen. delay(5000); // warte 5s, solange sollen beide Züge stehen bleiben. digitalWrite(Pin4, HIGH); /* Ausfahrsignal 2 auf grün, nur Trigger, bleibt auf grün, Rotstellung erfolgt duch den Zug */ delay(200); digitalWrite(Pin4, LOW); // Rücknahme Grünschaltimpuls Signal2 delay(1000); digitalWrite(Pin3, HIGH); /* Ausfahrtsignal 1 auf grün, Zug 1 fährt 1,2s nach Zug 2 ab. */ delay(200); /* 200ms für den Signaleinschaltpulse 1, es sind selbstahltende Relais */ digitalWrite(Pin3, LOW); // Rücknahme Grünschaltimpuls Signal1 digitalWrite(Zug1, FALSE); digitalWrite(Zug2, FALSE); digitalWrite(Zug1u2, FALSE); // Rücksetzen der Merker } }
Sieht scheußlich aus - so Arduinostyle ;-) Wozu sich den Pinzustand (Zugerkennung) nochmal irgendwo merken, und dann auch noch als int? Ganz oben war es doch noch ein Bit! loop() heißt eigentlich main(). Das müsstests du als alter C-Programmierer doch schon mal irgendwo gesehen haben. Da steht bei einem uC dann meist so was wie
1 | void main(void) |
2 | {
|
3 | init(); |
4 | while(1){ |
5 | ...
|
6 | }
|
7 | }
|
Wolfgang S. schrieb: > void setup() { > pinMode(Pin4, OUTPUT); // Ansteuerung Ausfahrtsignal 2 > pinMode(Pin3, OUTPUT); // Ansteuerung Ausfahrtsignal 1 > pinMode(Pin2, INPUT); // Zugerkennung 2 > pinMode(Pin1, INPUT); // Zugerkennung 1 > int Zug1 = 0; // Variabele1 merkt wenn Zug 1 angekommen > int Zug2 = 0; // Varaibele2 merkt wenn Zug 2 angekommen > int Zug1u2 = 0; // Varaibele3 merkt wenn beide Züge angekommen > sind > > } wäre dann init(). Angenommen du hättest einen 10F322 vieleicht ungefähr so
1 | #define SIGNAL_1 LATAbits.LATA0
|
2 | #define SIGNAL_2 LATAbits.LATA1
|
3 | #define ZUG_1 PORTAbits.PORTA2
|
4 | #define ...
|
5 | |
6 | void init(void) |
7 | {
|
8 | TRISAbits.TRISA0 = 0; // Ausfahrtsignal -> Output |
9 | TRISAbits.TRISA1 = 0; |
10 | TRISAbits.TRISA2 = 1; // Zugerkennung -> Input |
11 | ...
|
12 | |
13 | }
|
14 | |
15 | void main(void) |
16 | {
|
17 | init(); |
18 | while(1){ |
19 | if(ZUG_1){ |
20 | ...
|
21 | }
|
22 | ...
|
23 | }
|
24 | }
|
Wolfgang S. schrieb: > so stelle ich mir das C-Programm für den 10F200 vor. Wenn dieser Code wirklich von Dir wäre, warum hast Du dann keine ATtiny25 gekauft? So sieht das doch arg abgekupfert aus.
Peter D. schrieb: > Wolfgang S. schrieb: >> so stelle ich mir das C-Programm für den 10F200 vor. > > Wenn dieser Code wirklich von Dir wäre, warum hast Du dann keine > ATtiny25 gekauft? > So sieht das doch arg abgekupfert aus. Das stimmt. Da ich keine Arduinos benutze, ist mir das Idiom ("DigitalWrite") nicht ins Auge gesprungen. Entsprechende Schnipsel findet man haufenweise im Web, z.B. hier http://forum.arduino.cc/index.php?topic=145392.0 Anyway, da mich mir schon mal die Mühe gemacht habe und um zu zeigen, daß es relativ unaufwendig auch mit einem PIC10F200 geht, nachfolgend die 1:1-Umsetzung für die PIC10F20x. Wie man sieht, passt dergleichen drei mal rein.
1 | /* W.Strobl 4.2.2016. Simple Ablaufsteuerung,
|
2 | siehe https://www.mikrocontroller.net/topic/388907#4454480
|
3 | Vorgabe asis angepasst für Microchip PIC 10F202. Sollte unverändert auch mit dem
|
4 | PIC 10F200 laufen.
|
5 |
|
6 | F:\e\pic\eisenbahn>xc8 --chip=10F202 --outdir=eisenbahn --ASMLIST --opt=default,+asm,+asmfile,+debug eisenbahn.c
|
7 | Microchip MPLAB XC8 C Compiler (Free Mode) V1.33
|
8 | Part Support Version: 1.33 (A)
|
9 | Copyright (C) 2014 Microchip Technology Inc.
|
10 | License type: Node Configuration
|
11 | |
12 | (1273) Omniscient Code Generation not available in Free mode (warning)
|
13 | |
14 | Memory Summary:
|
15 | Program space used 52h ( 82) of 200h words ( 16.0%)
|
16 | Data space used 8h ( 8) of 18h bytes ( 33.3%)
|
17 | EEPROM space None available
|
18 | Data stack space used 0h ( 0) of 10h bytes ( 0.0%)
|
19 | Configuration bits used 1h ( 1) of 1h word (100.0%)
|
20 | ID Location space used 0h ( 0) of 4h bytes ( 0.0%)
|
21 |
|
22 | resp.
|
23 | |
24 | F:\e\pic\eisenbahn>xc8 --chip=10F200 --outdir=eisenbahn --ASMLIST --opt=default,+asm,+asmfile,+debug eisenbahn.c
|
25 | Microchip MPLAB XC8 C Compiler (Free Mode) V1.33
|
26 | Part Support Version: 1.33 (A)
|
27 | Copyright (C) 2014 Microchip Technology Inc.
|
28 | License type: Node Configuration
|
29 | |
30 | (1273) Omniscient Code Generation not available in Free mode (warning)
|
31 | |
32 | Memory Summary:
|
33 | Program space used 52h ( 82) of 100h words ( 32.0%)
|
34 | Data space used 8h ( 8) of 10h bytes ( 50.0%)
|
35 | EEPROM space None available
|
36 | Data stack space used 0h ( 0) of 8h bytes ( 0.0%)
|
37 | Configuration bits used 1h ( 1) of 1h word (100.0%)
|
38 | ID Location space used 0h ( 0) of 4h bytes ( 0.0%)
|
39 |
|
40 | */
|
41 | |
42 | #include <xc.h> /* XC8 General Include File */ |
43 | |
44 | #define SYS_FREQ 4000000L
|
45 | #define _XTAL_FREQ 4000000
|
46 | #define FCY SYS_FREQ/4
|
47 | |
48 | // CONFIG1
|
49 | #pragma config WDTE = OFF // Watchdog Timer (WDT enabled)
|
50 | #pragma config CP = OFF // Code Protect (Code protection off)
|
51 | #pragma config MCLRE = OFF // Master Clear Enable (GP3/MCLR pin fuction is digital I/O, MCLR internally tied to VDD)
|
52 | |
53 | /* Automatische Zugkreuzung an einleisiger Strecke mit PIC 10F200
|
54 | egal welcher Zug als erster im Bahnhof ist, erst wenn beide eingefahren
|
55 | sind gibt es freie Ausfahrten 5s später in 1,2s Abstand */
|
56 | |
57 | // Eine sprechendere Benennung der Pins wäre sinnvoll und weniger fehlerträchtig
|
58 | |
59 | #define Pin1 GPIObits.GP2
|
60 | #define Pin2 GPIObits.GP3
|
61 | #define Pin3 GPIObits.GP0
|
62 | #define Pin4 GPIObits.GP1
|
63 | |
64 | static struct |
65 | {
|
66 | unsigned Zug1: 1; |
67 | unsigned Zug2: 1; |
68 | } state; |
69 | |
70 | void setup(void) |
71 | {
|
72 | TRIS = 0b00001100; // GP0 & GP1 Output, GP3, GP4 Input |
73 | state.Zug1 = 0; // Zug angekommen |
74 | state.Zug2 = 0; // " |
75 | Pin3 = 0; // Ansteuerung Ausfahrsignal |
76 | Pin4 = 0; // " |
77 | }
|
78 | |
79 | void main(void) |
80 | {
|
81 | setup(); |
82 | |
83 | while (1) |
84 | {
|
85 | if (Pin1) |
86 | {
|
87 | state.Zug1 = 1; |
88 | }
|
89 | if (Pin2) |
90 | {
|
91 | state.Zug2 =1 ; |
92 | }
|
93 | |
94 | if (state.Zug1 && state.Zug2) |
95 | {
|
96 | __delay_ms(5000); // warte 5s, solange sollen beide Züge stehen bleiben. |
97 | Pin3 = 1; // Ausfahrsignal 2 auf grün, nur Trigger, bleibt auf grün, Rotstellung erfolgt duch den Zug |
98 | __delay_ms(200); |
99 | Pin3 = 0; // Rücknahme Grünschaltimpuls Signal2 |
100 | __delay_ms(1000); |
101 | Pin4 = 1; // Ausfahrtsignal 1 auf grün, Zug 1 fährt 1,2s nach Zug 2 ab. |
102 | __delay_ms(200); // 200ms für den Signaleinschaltpulse 1, es sind selbstahltende Relais |
103 | Pin4 = 0 ; // Rücknahme Grünschaltimpuls Signal1 |
104 | state.Zug1 = 0; |
105 | state.Zug2 = 0; |
106 | }
|
107 | }
|
108 | }
|
Peter D. schrieb: > warum hast Du dann keine ATtiny25 gekauft? Ist ja gut jetzt. Außer dir interressiert sich in diesem Thread anscheinend niemand dafür ;-)
Volker S. schrieb: > Peter D. schrieb: >> warum hast Du dann keine ATtiny25 gekauft? > > Ist ja gut jetzt. Außer dir interressiert sich in diesem Thread > anscheinend niemand dafür ;-) Warum sollte man 1,25 EUR für eine Trivialsteuerung ausgeben, wenn es auch 0,50 EUR tun? Oder andersrum, wenn man noch 5 Cent drauflegt, bekommt man den PIC 12F1840 der etwas besser ausgestattet ist. (Alle Preise Reichelt) Woher kommt eigentlich dieses zwanghafte Verhalten auf Seiten der Atmel-Fans, den Leuten das Herumspielen mit den Microchip-Prozessoren ausreden zu wollen und auf jede auch noch so umpassende Gelegenheit anzuspringen?
Wolfgang S. schrieb: >>> warum hast Du dann keine ATtiny25 gekauft? Peter D. schrieb: > Wenn dieser Code wirklich von Dir wäre, warum hast Du dann keine > ATtiny25 gekauft? > So sieht das doch arg abgekupfert aus. Wenn Du richtig zitierst dann erschliesst sich gleich eine ganz andere Aussage. Der TE posted AVR Code will aber einen Pic einsetzen.
vloki schrieb: > Sieht scheußlich aus - so Arduinostyle ;-) > > Wozu sich den Pinzustand (Zugerkennung) nochmal irgendwo merken, und > dann auch noch als int? Ganz oben war es doch noch ein Bit! > Hallo vloki, die zusätzlichen Bits als Merker weil die Zugerkennung eine Durchfahrtserkennung mit Reed-Kontakt durch einen Magnet im letzen Wagen ist. Die Eingänge für beide Zugerkennungen dürften kaum je beide gleichzeitig highlevel haben. Wichtig ist daß je Zyklus beide Ereignisse gewesen sein müssen. Gruß
Michael K. schrieb: > Der TE posted AVR Code will aber einen Pic einsetzen. Quark. Wenn überhaupt, dann Arduino-Code. Weder muß man die ursprünglich vom Arduino-Projekt verwendeten AVR-Prozessoren auf diese Weise verwenden, noch ist inzwischen die Arduino-Plattform weiterhin auf die AVr-Prozessoren beschränkt. Siehe z.B. https://www.arduino.cc/en/ArduinoCertified/IntelGalileo Im übrigen hat der OP ursprünglich nur Pseudocode gezeigt und das nach Arduino aussehende Stück erst auf meine Nachfrage hin nachgereicht. Mir kommt zwar das Schweigen bezüglich doch naheliegender Fragen (etwa: wie willst Du die Dinger eigentlich flashen?) auch etwas merkwürdig vor, man sollte aber nicht gleich hinter jeder etwas unbeholfenen Frage eine Hausaufgabenschwindelei vermuten. Daß jemand, der neu auf dem Gebiet ist, sich auf die Nachfrage nach konkretem Code hin etwas aus dem Netz zusammenklickt, erscheint mir auch nicht ganz unplausibel.
Wolfgang S. schrieb: > Volker S. schrieb: >> Peter D. schrieb: >>> warum hast Du dann keine ATtiny25 gekauft? >> >> Ist ja gut jetzt. Außer dir interressiert sich in diesem Thread >> anscheinend niemand dafür ;-) > > Warum sollte man 1,25 EUR für eine Trivialsteuerung ausgeben, wenn es > auch 0,50 EUR tun? > > Oder andersrum, wenn man noch 5 Cent drauflegt, bekommt man den PIC > 12F1840 der etwas besser ausgestattet ist. (Alle Preise Reichelt) > > Woher kommt eigentlich dieses zwanghafte Verhalten auf Seiten der > Atmel-Fans, den Leuten das Herumspielen mit den Microchip-Prozessoren > ausreden zu wollen und auf jede auch noch so umpassende Gelegenheit > anzuspringen? Hallo, bitte nicht streiten, als Anfänger macht man Fehler, jetzt liegen aber hier einige 10F200 und die möchte ich als Ersatz für TTL-74xx oder CD40xx verwenden, programmieren statt NOR, NAND, XOR, JK-flip-lops verlöten und CD4020 für timer-Funktionen dazuverdrahten. Gruß
Wolfgang S. ("stackpointer") schrieb: > Wolfgang S. schrieb: > > > Hallo ws01 > danke, sehr hilfreich. Bitte. Wäre es Dir möglich, etwas mehr Kontext zu verraten, was Du nun genau mit diesen Informationen anfängst? Zu "die zusätzlichen Bits als Merker weil die Zugerkennung eine Durchfahrtserkennung mit Reed-Kontakt durch einen Magnet im letzen Wagen ist. Die Eingänge für beide Zugerkennungen dürften kaum je beide gleichzeitig highlevel haben. Wichtig ist daß je Zyklus beide Ereignisse gewesen sein müssen." eine Frage. Hast Du Unterschiede zwischen Deinem Codeschnipsel im Arduionostyle und meinem lauffähigen Programm bemerkt? Wenn ja, welche? Außerdem würde mich immer noch interessieren, woher Du diese Arduiono-Librarycalls herhast und wie Du den PIC eigentlich flashen willst.
Wolfgang S. schrieb: > eine Frage. Hast Du Unterschiede zwischen Deinem Codeschnipsel im > Arduionostyle und meinem lauffähigen Programm bemerkt? Wenn ja, welche? > > Außerdem würde mich immer noch interessieren, woher Du diese > Arduiono-Librarycalls herhast und wie Du den PIC eigentlich flashen > willst. Hallo, Unterschiede, neben der besseren Lesbarkeit fällt mir auf daß setup am Anfang von main keine Befehle enthält sondern als Unterprogramm aufgerufen wird und in jedem Durchlauf in spezielle Register abgelegt wird. Jetzt wird mir auch der Unterschied zwischen Arduino und PIC klar, Arduinos haben ein Minibetriebssystem um die per USB ankommenden Programmcodes zu speichern und zu starten. PIC macht das wohl durch die I/O-Pins und hardware-Spannungsfunktionen um in den flash-mous zu gelangen. Also wohl eine Art Flashmemory mit serial I/O Flashen, dafür kaufte ich mir PicKit3. Danke
Wolfgang S. schrieb: > Außerdem würde mich immer noch interessieren, woher Du diese > Arduiono-Librarycalls herhast und wie Du den PIC eigentlich flashen > willst. Ooops. Sehe gerade "ich habe die MPLAB IDE 2.30 installiert, habe die Programmieradapter und auch c-compiler und Assemblerpakete von MPLAB.". weiter oben. Nun, die IDE mit der Versionsnummer heisst "MPLAB X" und aktuell ist da eher V 3.2. Und "Programmieradapter" gibt es eine ganze Reihe, genau so wie C-Compiler. Wahrscheinlich habe ich das deswegen als "nicht informativ" überlesen. Wenn Du von den wenigen, die sich hier freiwillig mit PIC beschäftigen, noch irgend eine weitere Unterstützung erwartest, solltest Du nicht derart sparsam mit konkreten Informationen umgehen. Wenn Du tatsächlich die eingangs geschilderten Erfahrungen hast, solltest Du wissen, wie sehr es auf Details ankommt. Sehe gerade die nachfolgende Antwort: > Unterschiede, neben der besseren Lesbarkeit fällt mir auf daß im Bereich > setup keine Befehle nötig sind, das wird wohl vom compiler und beim > flashvorgang in spezielle Register abgelegt. Lies für die Grundlagen das "Midrange-Manual" (http://ww1.microchip.com/downloads/en/DeviceDoc/33023a.pdf, keine Ahnung, ob das die aktuelle Version ist, ich hab das vor vielen Jahren mal durchgelesen und bin zu faul, hinterherzurecherchieren). Darauf wollte ich aber nicht hinaus, nicht auf den Initalisierungs-Teil, sondern auf die Loop. > > Jetzt wird mir auch der Unterschied zwischen Arduino und PIC klar, > Arduinos haben ein Minibetriebssystem um die per USB ankommenden > Programmcodes zu speichern und zu starten. Du vergleichst Äpfel und Birnen. Was genau, sagtest Du, hast Du früher programmiert? Arduinos sind keine Prozessoren, sondern eine spezifische Anwendung bestimmter Prozessoren, zumeist bzw. anfänglich Atmel megaAVR. Es hat aber auch Versuche gegeben, Arduino-Systeme mit Microchip-Prozessoren zu etablieren: http://www.microchip.com/pagehandler/en-us/chipkit-development-platform.html "Microchip and Digilent Launch First Arduino™ Compatible 32-bit Microcontroller Development Platform" > > PIC macht das wohl durch die I/O-Pins und hardware-Spannungsfunktionen > um in den flash-mous zu gelangen. Also wohl eine Art Flashmemory mit > serial I/O Alles über AVR ISP: http://www.atmel.com/images/doc0943.pdf Noch Fragen? Was das Pickit 3 angeht, spricht etwas dagegen, mein Programm zu übersetzen, auf einen 10F200 zu schreiben und das ganze auf einem Steckbrett mal auszuprobieren? Mehr als fünf Minuten sollte das nicht kosten ...
Wolfgang S. schrieb: > Hallo vloki, > die zusätzlichen Bits als Merker weil die Zugerkennung eine > Durchfahrtserkennung mit Reed-Kontakt durch einen Magnet im letzen Wagen > ist. Ja, habe ich mir dann auch gedacht ;-) Wolfgang S. schrieb: > Unterschiede, neben der besseren Lesbarkeit fällt mir auf daß setup am > Anfang von main keine Befehle enthält sondern als Unterprogramm > aufgerufen wird und in jedem Durchlauf in spezielle Register abgelegt > wird. Beim Arduino wird die Funktion Setup() auch aufgerufen. Das siehst du nur nicht. In beiden Fällen wird das nur ein einziges mal aufgerufen, weil in main() danach eine Endlosschleife kommt. Die Arduinoumgebung macht daraus (für dich unsichtbar) vermutlich so was wie:
1 | void main(void){ |
2 | setup(); |
3 | while(1){ |
4 | loop(); |
5 | }
|
6 | }
|
In der Main-Schleife wird also die Funktion Schleife aufgerufen ;-)
Mit Befehlen meinst du vermutlich die "Funktionen" wie z.B
pinMode(Pin4, OUTPUT);
Da passiert genau das gleiche wie wenn man einfach das entsprechende Bit
im Richtungsregister des uC setzt.
TRISAbits.TRISA0 = 0; // Ausfahrtsignal -> Output
Nur wird im ersten Fall eventuell noch ein Haufen unnötiger Overhead
erzeugt, falls da wirklich eine Funktion aufgerufen werden sollte.
Möglicherweise machen die das aber auch über Makros...
Egal es geht in diesem Thread ja nicht um Arduino
Wolfgang S. schrieb:
> Jetzt wird mir auch der Unterschied zwischen Arduino und PIC klar,
Ganz unten auf der uC Ebene gibt es eigentlich so gut wie keinen
Unterschied.
Der Arduino uC kommt meistens von Atmel ein PIC halt von Microchip. Wen
juckt's.
Wie du richtig vermutet hast, ist auf einem Arduino uC ein Programm (du
hast es Betriebssystem gennant), dass der Hersteller schon drauf
gespielt hat, damit der User kein Programmiergerät braucht.
Das nennt man im Allgemeinen Bootloader. Kann man auf alle uC drauf
machen, die in der Lage sind ihren eigenen Programmspeicher zu
schreiben.
Bei einem 10F200 macht das keinen Sinn, weil dieser Bootloader den
ganzen Programmspeicher füllen würde, aber schon der speichermäßig immer
noch winzige 10F32x kann das.
Heißt dann "Flash Program Memory with self read/write capability"
(brauchst du aber gar nicht, der 10F200 reicht erst mal völlig aus)
Wolfgang S. schrieb: > #define Pin1 GPIObits.GP2 > #define Pin2 GPIObits.GP3 > #define Pin3 GPIObits.GP0 > #define Pin4 GPIObits.GP1 Auch bei einfachen Programmen sollte man beschreibende Namen vergeben, dann lassen sich die Programme viel besser lesen und viele Kommentare werden überflüssig.
Peter D. schrieb: > Auch bei einfachen Programmen sollte man beschreibende Namen vergeben... Noch nicht ganz wach heute, Augen noch bisschen verklebt? Wolfgang S. schrieb: > nachfolgend die ***1:1-Umsetzung*** für die PIC10F20x... > ... > // Eine sprechendere Benennung der Pins wäre sinnvoll und weniger > fehlerträchtig > > #define Pin1 GPIObits.GP2 > ...
Wolfgang S. schrieb: > Hallo, > bitte nicht streiten, als Anfänger macht man Fehler, jetzt liegen aber > hier einige 10F200 und die möchte ich als Ersatz... Nö, hat ja keiner was dagegen. Aber wenn ich das hier lese: Wolfgang S. schrieb: > Schwierigkeiten machen mir die Handbücher und die Entwicklungsumgebung. ..dann kommen mir so ein paar Zweifel auf. Wie willst du einen Mikrocontroller denn benutzen, wenn dir die Manuals Schwierigkeiten bereiten? Schließlich mußt du ja wissen, wie man damit was macht und dazu ist Lesen und Verstehen angesagt. Da kommst du nicht dran vorbei. Was die IDE anbelangt, da wirst du bei den neueren PIC's eben auch durch müssen, weil die Zeiten der separaten PIC-Assembler und PIC-Brenner ein bissel vorbei ist und man zur Verwendung der PICkit2 und PICkit3 eben um die Software von Mikrochip nicht drumherum kommt. Allerdings scheint mir der PIC10F200 mit seinem 12 Bit breiten Maschinenbefehlssatz durchaus den sehr viel älteren PIC's zu entsprechen und mit maximal 256 Programmschritten ist schlichtweg Assembler angesagt. Sollte bei einem 5 Beiner ja wohl kein wirkliches Problem darstellen. Da kann man dann doch noch nen älteren Standalone-Assembler benutzen (die Assembler-Syntax von MicroChip ist mMn. nämlich ein bissel grauselig). Bitte keine Kommentare von C-Leuten dazu - das wäre albern. Wolfgang S. schrieb: > Wer kann mir helfen den PIC entsprechend zu versorgen, auch interne > Taktgebung, Zeitparametrierung usw. Wie rufe ich Beblothekfunktionen auf > um die Timer verfügbar zu habnen Das Manual zum Controller ist dein Freund. Und irgendwelche Bibliotheksfunktionen zum Einrichten der Timer brauchst du auch nicht. Die wenigen Hardware-Register, die dazu gehören, spricht man direkt an und sie sind auch gut dokumentiert. Eines noch: Das, was du da als angezieltes Programm skizziert hast, ist mir nicht wirklich verständlich. Wenn überhaupt, dann schreib die logischen Anweisungen hin. Also erstmal so etwa: Ausgang1 = Eingang2 and (not EIngang3) xor Eingang1; Der sinn solcher Notation ist es, daß du dir erstmal klar wirst darüber, was am Ende dabei herauskommen soll. Wie sich das in eine µC-Quelle übersetzt, kriegen wir später. W.S.
@Wolfgang: Du schreibst, dass du Pensionist bist. Kann es sein, dass dir die Infos in den Datenblättern nicht zugänglich sind, weil diese in englischer Sprache sind? Sag's einfach geradeaus wenn's so ist. Ist ja kein Ding. Wenn ich ein paar Jahre älter wär und es in der Schule nicht gelernt hätte, könnt ich's wohl auch nicht.
W.S. schrieb: > Wolfgang S. schrieb: >> Hallo, >> bitte nicht streiten, als Anfänger macht man Fehler, jetzt liegen aber >> hier einige 10F200 und die möchte ich als Ersatz... > > Nö, hat ja keiner was dagegen. Aber wenn ich das hier lese: > > Wolfgang S. schrieb: >> Schwierigkeiten machen mir die Handbücher und die Entwicklungsumgebung. > > ..dann kommen mir so ein paar Zweifel auf. Wie willst du einen > Mikrocontroller denn benutzen, wenn dir die Manuals Schwierigkeiten > bereiten? Schließlich mußt du ja wissen, wie man damit was macht und > dazu ist Lesen und Verstehen angesagt. Da kommst du nicht dran vorbei. Hier stimme ich uneingeschränkt zu. Man muß die Handbücher nicht auswendig lernen. Wer aber schon Schwierigkeiten hat bzw. keine Anstalten macht, fallweise und nach Bedarf einzelne Seiten oder Kapitel der Manuals bzw. Datenblätter zu studieren, sollte die die Finger vom, wie man so sagt, "nackten Metall" lassen. > > Was die IDE anbelangt, da wirst du bei den neueren PIC's eben auch durch > müssen, weil die Zeiten der separaten PIC-Assembler und PIC-Brenner ein > bissel vorbei ist und man zur Verwendung der PICkit2 und PICkit3 eben um > die Software von Mikrochip nicht drumherum kommt. Erstaunlich. Ich besitze sowohl ein originales PICkit2 als auch einen PICkit3-Clone (den von Olimex), und ziehe die .net-basierten Standalone-Programme dem plumpen IPE allemal vor. Probleme beim Gebrauch unter Windows 8.1 (x64) sind mir bislang nicht aufgefallen. Und einen PIC10/12/16/18/24, der sich nicht zumindest mit dem PICkit3 und der Standalone Application (http://ww1.microchip.com/downloads/en/DeviceDoc/PICkit3%200.2.0.3%20Setup.zip) programmieren ließe, hatte ich bislang noch nicht auf dem Schirm. Und da die Quellen vorhanden sind, bestehen durchaus Chancen, sich auf die Funktionsfähigkeit der Software noch eine Weile verlassen zu können. > > Allerdings scheint mir der PIC10F200 mit seinem 12 Bit breiten > Maschinenbefehlssatz durchaus den sehr viel älteren PIC's zu entsprechen Soweit noch richtig. > und mit maximal 256 Programmschritten ist schlichtweg Assembler > angesagt. Habe ich im vorliegenden Thread nicht bereits den Beweis erbracht, daß diese Behauptung unzutreffend ist? Die simple Zugsteuerung des OP läßt sich mit dem PIC10F200 mit links erledigen, das schreibt man einfach so runter. Und hat noch viel Luft. > Sollte bei einem 5 Beiner ja wohl kein wirkliches Problem > darstellen. Da kann man dann doch noch nen älteren Standalone-Assembler > benutzen (die Assembler-Syntax von MicroChip ist mMn. nämlich ein bissel > grauselig). Wozu sollte man? Ich kann mir ohne Weiteres Aufgaben für einen 10F200 denken oder konstruieren, die von der Programmierung auf Maschinensprachen- bzw. Assemblerniveau profitieren oder diesen nötig machen könnten. Das konkrete Problem, das den Ausgangspunkt dieses Threads bildet, gehört aber sicher nicht dazu. > > Bitte keine Kommentare von C-Leuten dazu - das wäre albern. Was bitte sind "C-Leute"? Ein merkwürdiges Schubladendenken haben manche Leute ...
Volker S. schrieb: > Peter D. schrieb: >> Auch bei einfachen Programmen sollte man beschreibende Namen vergeben... > Noch nicht ganz wach heute, Augen noch bisschen verklebt? > > > Wolfgang S. schrieb: >> nachfolgend die ***1:1-Umsetzung*** für die PIC10F20x... >> ... >> // Eine sprechendere Benennung der Pins wäre sinnvoll und weniger >> fehlerträchtig >> >> #define Pin1 GPIObits.GP2 >> ... Genau das. Danke. Manchmal kann man nur den Kopf schütteln.
Volker S. schrieb: > Bei einem 10F200 macht das keinen Sinn, weil dieser Bootloader den > ganzen Programmspeicher füllen würde, aber schon der speichermäßig immer > noch winzige 10F32x kann das. Wie das? Der 10F320 hat genau so viel bzw. genau so wenig Flash wie der 10F200, 256 Worte. Der Unterschied ist also gerade nicht der vorhande Platz, sondern zu wenig Stack, zu wenig RAM und deswegen vermutlich auch die fehlende Fähigkeit der Selbstprogrammierbarkeit. > Heißt dann "Flash Program Memory with self read/write capability" > (brauchst du aber gar nicht, der 10F200 reicht erst mal völlig aus) Aber danke für den Hinweis - ich habe den 10F320 zwar schon ein paar mal benutzt (z.B. für Spielereien wie die http://www.mystrobl.de/Plone/basteleien/10f320/stridulator hier und die: http://www.mystrobl.de/Plone/basteleien/10f320/duet.mp4/view), daß der ebenfalls seinen Flash beschreiben kann, war mir aber gar nicht aufgefallen. Wäre mal eine nette Fingerübung, ein Bootloader für den 10F320. :-) Viel Sinn hat das aber wohl nicht, außer man verbucht das unter "Demoszene".
W.S. schrieb: > Allerdings scheint mir der PIC10F200 mit seinem 12 Bit breiten > Maschinenbefehlssatz durchaus den sehr viel älteren PIC's zu entsprechen > und mit maximal 256 Programmschritten ist schlichtweg Assembler > angesagt. Sollte bei einem 5 Beiner ja wohl kein wirkliches Problem > darstellen. Da kann man dann doch noch nen älteren Standalone-Assembler > benutzen (die Assembler-Syntax von MicroChip ist mMn. nämlich ein bissel > grauselig). > > Bitte keine Kommentare von C-Leuten dazu - das wäre albern. Albern ist es, sich Kommentare zu verbitten. Ich habe sowohl mit Assembler als auch C hinreichende Erfahrungen und kann guten Gewissens sagen: C hat den Charme, dass man in einer gewohnten Sprache auf verschiedenen µC-Plattformen hardwarenah und assembler-like programmieren kann, ohne sich jedes Mal mit der spezifischen Syntax des jeweilgen Assemblers herumschlagen zu müssen. Der Maschinencode den man mit C-Code erzeugen, ist gar nicht so selten sehr nah am Optimum. Eine gewisse Vorstellung darüber, wie der Compiler funktioniert und was der µC kann, ist natürlich hilfreich. Wer z.B. Bitwerte in einem 8-Bit-µC in 16-Bit-Int speichert, macht definitiv was falsch. Beherzigt man solche Dinge, finden selbst erfahrene Assemblerprogrammierer meist nur wenig Möglichkeiten zur Verbesserung. Und wenn es doch mal auf Taktzyklen ankommt, kann man immer noch den Inline-Assembler verwenden. Wer C natürlich nur im Zusammenhang mit sperrigen Bibliotheken kennt und sieht, der kommt zwangsläufig dem falschen Schluss, dass C für so kleine µC völlig ungeeignet sei. Ich habe selbst schon ein Programm für den 10F200 geschrieben. In kaum mehr als der Hälfte des Programmspeichers habe ich den PIC initialisiert, und in einer Schleife ein Eingangssignal abgefragt, dazu einen Taster mit kurz, mittel und langem Tastendruck, eine LED und einen Pizo zur Ausgabe, sowie ein automatisches Power-Off bei Nichbenutzung. Und das alles bedurfte keiner Verrenkungen, einfach nur gerade herunter. Also: C ist OK.
W.S. schrieb: > und mit maximal 256 Programmschritten ist schlichtweg Assembler > angesagt. > > Bitte keine Kommentare von C-Leuten dazu - das wäre albern. Okay, dann bin ich halt albern, aber es stimmt einfach nicht das man die nicht in C Programmieren kann. Das geht nämlich ganz hervorragend ohne eine Zeile ASM. Nicht nur weil es explizit in der XC8 Doku steht sonder weil ich das auch schon mehrfach gemacht habe.
Wolfgang S. schrieb: > Wäre mal eine nette Fingerübung, ein Bootloader für den 10F320. :-) Gibt's schon: Tiny Multi Bootloader (https://sourceforge.net/projects/tinypicbootload/)
Thomas E. schrieb: > Wolfgang S. schrieb: >> Wäre mal eine nette Fingerübung, ein Bootloader für den 10F320. :-) > > Gibt's schon: Tiny Multi Bootloader > (https://sourceforge.net/projects/tinypicbootload/) Interessant. Die da konkret abgelegte Fassung ist zwar für den doppelt so grossen 10F322, da der Boatloader aber nur 84 Worte belegt, müsste man das durch Ändern von "max_flash" von 0x200 auf 0x100 (und vermutlich ein paar andere technische Kleinigkeiten) unschwer auch für den 10F320 anpassen können. Dann blieben immer noch 172 Worte für das nachzuladende Programm. M.a.W. die weiter oben demonstrierte simple Ablaufsteuerung mit ihren 82 Worten, geschrumpft bei Anpassung an den 10F320 auf 76 Worte, das ließe dann immer noch 96 Worte für irgendwelche Erweiterungen. Faszinierend. Danke für den Hinweis!
Hallo, an alle danke für die Unterstützung, zum löten/stecken/flashen der hardware bin ich noch nicht gekommen. Heute morgen liess ich die simulation der MPLAB-IDE laufen, mir kam es vor daß die ca. 10 - 20 mal schneller lief. Daher die Frage, ist der timer nicht richtig parametriert oder ist das eine Eigenart der IDE mit ihrem Simulator NICHT auch die Echtzeit des chips zu simulieren. Simulationszeit in Abhängigkeit der PC-Geschwindigkeit? Grüsse an alle.
Wolfgang S. schrieb: > ist der timer nicht richtig parametriert oder ist das > eine Eigenart der IDE mit ihrem Simulator NICHT auch die Echtzeit des > chips zu simulieren. Ob der Simulator richtig parametriert ist, kann natürlich keiner wissen ausser dir ;-) Die Simulation läuft viel schneller ab als in der Echtzeit. Für Zeitmessungen kannst du das Stopwatch benutzen. Um z.B. die Zeit zwischen zwei Eregnissen zu messen, kannst du z.B. Breakpoints setzen und das Stopwatch ablesen. Die gemessene Zeit stimmt mit der echten überein, wenn in den Projekteigenschaften die "Instruction execution frequency" des Simulators richtig eingestellt ist.
Wolfgang S. schrieb: > Volker S. schrieb: > >> Bei einem 10F200 macht das keinen Sinn, weil dieser Bootloader den >> ganzen Programmspeicher füllen würde, aber schon der speichermäßig immer >> noch winzige 10F32x kann das. > > Wie das? Der 10F320 hat genau so viel bzw. genau so wenig Flash wie der > 10F200, 256 Worte. Ja, es ging mir nur um die Fähigkeit. Ich habe mit den 10F20x ehrlich gesagt fast noch gar nichts gemacht, obwohl ich auch davon ein paar Typen rumliegen habe. Da gab es mal so ein Bundle mit PICKIT2 und 10 verschiedenen PICs das auch noch billiger war als das nackte PICKIT2. Als ich dann den 10F32x gesehen habe und ich was gaaaanz kleines bauen wollte, hat der mich schon mehr interressiert. Der 32x ist auch den PIC18 und den neueren PIC16 ähnlicher (mit LAT und so), mit denen ich mich mehr beschäftige.
Michael L. schrieb: > Ich habe sowohl mit Assembler als auch C hinreichende Erfahrungen und > kann guten Gewissens sagen:.. Ach, immer diese Fanboys, die es nicht lassen können - selbst dann, wenn es bereits zuvor ausdrücklich unerwünscht ist. Nochmal im Klartext: Wenn man eines der PICkit's benutzen will, dann muß man sich auch auf die Software von MicroChip einlassen. Mir ist jedenfalls keine Fremdsoftware bekannt, die mit den PICkit's problemlos umgeht. Für ältere PIC's sieht das anders aus, da gibt es (ähemm.. gab es) ne Menge PIC-Programmierer unterschiedlichster Provenienz. Ebenso gibt/gab es einiges an PIC-Assemblern, die zu dieser Generation von Tools passen - sowohl kommerzielle als auch nichtkommerzielle Assembler. Dasselbe kann man jedoch von (vintage) C-Compilern nicht sagen. Da ist denn wohl wieder die IDE von MicroChip nebst deren Compilern und sonstigen Tools angesagt. So. Das war meine Antwort auf die Bedenken des TO bezüglich Manuals und IDE, siehe dieses: Wolfgang S. schrieb: > Schwierigkeiten machen mir die Handbücher und die Entwicklungsumgebung. Ist das nun endlich klar genug? W.S.
Nun zumindest die IDEs kann man immer noch umgehen. Ich verwende Notepad++ mit dem CC5X Compiler ubd zum Flashen die PICkit3 Programmer Application v3.10 aus dem Microchip Archiv. Man muss dort lediglich eine aktuelle PK2DeviceFile.dat reinkopieren, dann klappt es auch mit aktuellen PICs wie 10F320, 12F1501, etc.
W.S. schrieb: > Ist das nun endlich klar genug? Es gibt hier im Forum einige bekannte Gesichter, für die C ein rotes Tuch ist und die jedesmal unbedingt ihren Senf dazugeben müssen. Das kann man nicht ändern, daher einfach diese Postings ignorieren. In einer Demokratie gehört es sich, daß jeder seine Meinung äußern kann, ohne zensiert zu werden.
Peter D. schrieb: > In einer Demokratie gehört es sich, daß jeder seine Meinung äußern kann, > ohne zensiert zu werden. Und wenn es voll am Thema vorbeigeht, darf man aber auch mal drauf hinweisen. Das ist miener Meinung nach dann keine Zensur und sollte auch nicht negativ bewertet werden (wer immer das war ;-)
Scotty schrieb: > Nun zumindest die IDEs kann man immer noch umgehen. > Ich verwende Notepad++ mit dem CC5X Compiler ubd zum Flashen die PICkit3 > Programmer Application v3.10 aus dem Microchip Archiv. Man muss dort > lediglich eine aktuelle PK2DeviceFile.dat reinkopieren, dann klappt es > auch mit aktuellen PICs wie 10F320, 12F1501, etc. Ich habe diese Spielereien inzwischen aufgegeben. Das kann man unseren Studierenden einfach nicht zumuten und es geht ja auch ganz gut mit den "regulären" Tools (MPLABX, C18, XC8). Sogar auf mehreren Betriebssystemen...
Hallo, nochmals ein Hilferuf! Ich schaue mir vor dem Brennen/Flashen die Beschriftung auf dem Microchip-Programmieradapter aus dem Kit mit Pickkit 3 gerade genau an: Dort ist für die 8-Pin-Gehäuse Vdd auf Pin 1, Vss auf Pin 8 beschriftet, von I/O RA0 bis I/O RA5 die Pins 7 bis Pin 2. Es handelt sich um das board: Teilenummer: DM164130-9 - PICkit Low Pin Count Demo Board Im Datenblatt bei Microchip: http://pdf1.alldatasheet.com/datasheet-pdf/view/140263/MICROCHIP/PIC10F200.html Auf seite 4 steht aber Pin 2 für Vdd, Pin 7 für Vss Und auf dem Programmieradapter sieht es aus wie fest verdrahtet im layout der gedruckten Schaltung. Gruß
Wolfgang S. schrieb: > Ich schaue mir vor dem Brennen/Flashen die Beschriftung auf dem > Microchip-Programmieradapter aus dem Kit mit Pickkit 3 gerade genau an: Das ist nicht gerade ein allgemeiner Programmieradapter und ist leider auch anscheinend nicht PIC10 kompatibel :-(
Volker S. schrieb: > Als ich dann den 10F32x gesehen habe und ich was gaaaanz kleines bauen > wollte, hat der mich schon mehr interressiert. Der 32x ist auch den > PIC18 und den neueren PIC16 ähnlicher (mit LAT und so), mit denen ich > mich mehr beschäftige. Ich weiß. Anfang 2014 hatte Reichelt den 10LF320-IP für 39 Cent (incl. MWSt.) angeboten. Da habe ich dann gleich zwanzig Stück von in den Schrank gelegt, gut die Hälfte davon sind schon für alle möglichen Spielereien verbraucht. Rein interessehalber habe ich auch zwei 10F202 mitbestellt, die kosteten damals wie heute 50 Cent. Weitere werde ich sicherlich nicht kaufen, außer mir fällt irgend eine absonderliche Spielerei mit sehr vielen einzelnen Prozessoren ein, bei der es auf den Preis pro Stück ankommt.
Volker S. schrieb: > Das ist nicht gerade ein allgemeiner Programmieradapter und ist leider > auch anscheinend nicht PIC10 kompatibel :-( Als Programieradapter würde ich eher so was bezeichnen, wie der Sockerl der hier http://www.aliexpress.com/item/Free-shipping-PICKIT3-Programmer-PIC-ICD2-PICKit-2-PICKIT-3-Programming-Adapter-Universal-Programmer-Seat/32372215543.html?spm=2114.40010308.4.223.WmgvHD dabei ist. Habe ich auch einen, aber noch nie ausprobiert. Der PK3 Klon funktioniert jedenfalls bisher bestens! Wolfgang S. schrieb: > Rein interessehalber habe ich auch zwei 10F202 > mitbestellt, die kosteten damals wie heute 50 Cent. Weitere werde ich > sicherlich nicht kaufen... Das ist bei Reichelt aber auch echt günstig (wenn man auf den Cent schaut). Bei den meisten Distriubtoren und Microchip Direct ist da für kleine Stückzahlen kein nennenswerter Unterschied zwischen 200er und den 320er.
W.S. schrieb: > Michael L. schrieb: >> Ich habe sowohl mit Assembler als auch C hinreichende Erfahrungen und >> kann guten Gewissens sagen:.. > > Ach, immer diese Fanboys, die es nicht lassen können - selbst dann, wenn > es bereits zuvor ausdrücklich unerwünscht ist. Und weißt du was: Das geht mir ausdrücklich am A**** vorbei. Ich hab schon bei deinem vorherigen Posting verstanden, dass du keine Ahnung hast, wie das im Internet funktioniert. > Nochmal im Klartext: > Wenn man eines der PICkit's benutzen will, dann muß man sich auch auf > die Software von MicroChip einlassen. Mir ist jedenfalls keine > Fremdsoftware bekannt, die mit den PICkit's problemlos umgeht. Dein "Argument" gegen C ist also, dass man fürs PICkit SW von Mircochip bracht. Was für ein Stuss. Aber bitte. Von mir aus kannst du weiter deine merkwürdigen Ansichten hier absondern, wenn du glaubst, dass sie dadurch wahrer würden. > Dasselbe kann man jedoch von (vintage) C-Compilern nicht sagen. Da ist > denn wohl wieder die IDE von MicroChip nebst deren Compilern und > sonstigen Tools angesagt. ACK. Du hast selbstredend keinen Schimmer. Ich verrate dir mal was gaaanz Neues: In MPLAB konnte man schon vor Jahren fremde C-Compiler (und auch Assembler ;-) ) einbinden, die nicht von Microchip sind, und man muss dazu nicht mal ein Meerschweinchen bei Vollmond schlachten. :-P
Angehängte Dateien:
-

IMG_8387.jpg
83 KB

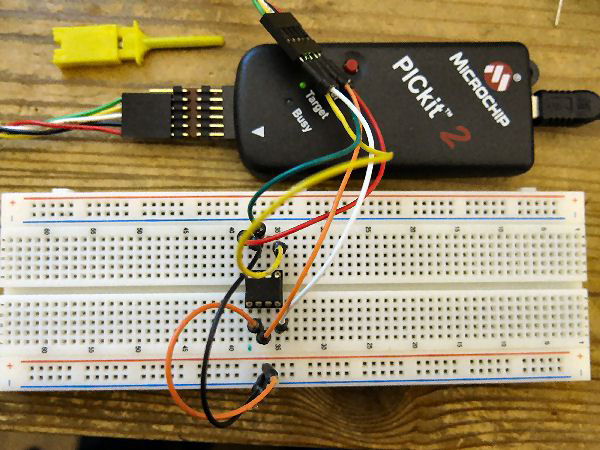
Wolfgang S. schrieb: > Hallo, > nochmals ein Hilferuf! > > Ich schaue mir vor dem Brennen/Flashen die Beschriftung auf dem > Microchip-Programmieradapter aus dem Kit mit Pickkit 3 gerade genau an: Sehr vernünftig. > > Dort ist für die 8-Pin-Gehäuse Vdd auf Pin 1, Vss auf Pin 8 beschriftet, > von I/O RA0 bis I/O RA5 die Pins 7 bis Pin 2. Für das Flashen ("In-Circuit Serial Programming", ICSP) der Midrange-Prozessoren sind neben den beiden Versorgungspins i.A. immer dieselben drei Pins zuständig: Vpp, ICSPDAT, ICSPCLK und die liegen geometrisch gesehen immer an der selben Stelle, bei einem DIP-8-Gehäuse sind Vdd und Vss Pin 1 und 8, Vpp ist Pin 4, ICSPDAT Pin 7 und ICSPCLK Pin 6. Details in dem schon mal von mir erwähnten Midrange-Manual in Kapitel 28. Das ist zwar uralt und es gibt neuere Texte, Variationen, Low Voltage Programming etc. pp., aber das ist die Grundlage. M.a.W, wenn man diese Pins entweder nur zum Flashen benutzt oder "in circuit" die an anderer Stelle ausführlich dokumentierten Entkopplungshinweise berücksichtigt, reicht ein fünfpoliger Stecker, der an immer die selben fünf Pins an der Stirnseite des Prozessors geht, für die unterschiedlichsten Prozessoren der Familie aus. So weit, so gut. Nun sind die 10Fxxx-Prozessoren aber zwar elektrisch und logisch durchaus kompatibel mit dem Verfahren, haben aber leider eine andere Pinbelegung. Was sich Microchip dabei gedacht hat, weiß ich nicht, zumindest bei der Gehäuseform DIP8 hätte man m.E. problemlos bei der standardisierten Belegung bleiben können. Bei den 10Fxxx liegt Vdd auf 2, Vss auf 7, Vpp auf 8, sowie ICSPDAT und CSPCLK auf 5 und 4. > > Es handelt sich um das board: Teilenummer: DM164130-9 - PICkit Low Pin > Count Demo Board > > Im Datenblatt bei Microchip: > > http://pdf1.alldatasheet.com/datasheet-pdf/view/140263/MICROCHIP/PIC10F200.html > > Auf seite 4 steht aber Pin 2 für Vdd, Pin 7 für Vss > > Und auf dem Programmieradapter sieht es aus wie fest verdrahtet im > layout der gedruckten Schaltung. Also kannst Du diesen Adapter nur für die Standardbelegung verwenden. Bau Dir also einen für 10Fxxx. Oder mach's wie ich, ich stecke kleine Testaufbauten einfach auf dem Steckbrett zusammen und programmiere in der Schaltung, ICSP halt, In-Circuit Serial Programming. :-) Nach dem Test demontiere ich das dann irgenwann wieder. Die Abbildung zeigt ein Beispiel mit dem 10F202, wobei alles bis auf die ICSP-Verdrahtung schon wieder entfernt ist.
Michael L. schrieb: > Und weißt du was: Das geht mir ausdrücklich am A**** vorbei. > > Ich hab schon bei deinem vorherigen Posting verstanden, dass du keine > Ahnung hast, wie das im Internet funktioniert. Ääääähhhh, um was geht's eigenlich?
Angehängte Dateien:
-

IMG_8387a.jpg
82 KB
Ich schrieb: > Nach dem Test demontiere ich das dann irgenwann wieder. Die Abbildung > zeigt ein Beispiel mit dem 10F202, wobei alles bis auf die > ICSP-Verdrahtung schon wieder entfernt ist. Keine Ahnung, was da schiefgegangen ist, ich probiere es noch mal mit dem Bild ...
W.S. schrieb: > Ach, immer diese Fanboys, die es nicht lassen können - selbst dann, wenn > es bereits zuvor ausdrücklich unerwünscht ist. Du verrennst Dich da in etwas. Erst stellt Du eine Behauptung auf die einfach nicht stimmt und dann ist von Dir ausdrücklich unerwünscht das man das richtigstellt auch wenn man es aus eigener Erfahrung besser weis. Das ein Imperator W.S. her nicht so gut ankommt dürfte Dir klar sein. Ich denke Du hast einen schlechten Tag erwischt. Kehren wir also bitte zu einem vernünftigen Ton zurück.
Volker S. schrieb: > Ääääähhhh, um was geht's eigenlich? Eigentlich um was ganz Einfaches: 1. Der TO ist jemand, der in Assembler nicht unerfahren ist und offenbar davor auch keine Scheu hat, aber der mit seinen eignen Worten "Schwierigkeiten machen mir die Handbücher und die Entwicklungsumgebung." mit IDE's vielleicht im Allgemeinen, vielleicht aber auch nur mit der von Microchip seine Probleme hat. 2. Wenn er jedoch ein PICkit3 oder 2 benutzen will, wird er um die Installation und Verwendung vom Microchip's IDE nebst Brennprogramm wohl nicht herumkommen. Jedenfalls nicht leicht herumkommen. 3. Da der Chip aber offenbar den klassischen 12 Bit Code innehat, kann man es mit älteren (vintage) Tools in Assembler genausogut tun. In Assembler und nicht in C, weil es (ich rede von vor 20 Jahren!!!) damals keinen passablen Compiler gab, weswegen da Assembler angesagt ist, was dem TO wohl keine Schwierigkeiten bereiten dürfte. Dazu passen dann diverse andere Programmieradapter (David Tait, Sprut und Konsorten), die es in der Vergangenheit zuhauf gegeben hat. 4. Jetzt kommen C-Fanboys und labern hier herum, weil sie genau das nicht bleiben lassen können. Wir reden hier nicht von einem ARM mit >128 K Flash, sondern von ganz winzig kleinen µC mit maximal 256 möglichen Programmschritten und 16 Byte RAM und 3 (DREI) I/O-Pins im SOT23-5. Dafür nen C-Compiler anwerfen? Ich halte das für voll daneben, quasi wieder mal mit Kanonen auf Spatzen. W.S.
W.S. schrieb: > Ich halte das für voll daneben, https://youtu.be/uKtTdvXO_40 Bist du vielleicht so eine Art "Moby PIC"?
W.S. schrieb: > Volker S. schrieb: >> Ääääähhhh, um was geht's eigenlich? > > Eigentlich um was ganz Einfaches: > > 1. Der TO ist jemand, der in Assembler nicht unerfahren ist und offenbar > davor auch keine Scheu hat, aber der mit seinen eignen Worten > "Schwierigkeiten machen mir die Handbücher und die > Entwicklungsumgebung." mit IDE's vielleicht im Allgemeinen, vielleicht > aber auch nur mit der von Microchip seine Probleme hat. So what. Er muß sie ja gar nicht benutzen. > 2. Wenn er jedoch ein PICkit3 oder 2 benutzen will, wird er um die > Installation und Verwendung vom Microchip's IDE nebst Brennprogramm wohl > nicht herumkommen. Jedenfalls nicht leicht herumkommen. Diese falsche Behauptung wird durch Wiederholung nicht besser. Der TO möchte, ich zitiere, "den PIC10F200 für ein einfache Zeitverzögerung einsetzen", es geht spezifisch um diesen. Er schrieb außerdem "... habe ich schon ein paar 10F200 gekauft" und erwähnte spezifisch C (und Assembler nur in Paranthese). Die PIC10F20x kann man problemlso sowohl mit einem PICkit2 als auch einem PICkit3 programmieren, ohne dafür eine der beiden IDE (MPLAB bzw. MPLAB X) oder das zugehörige IPE ("Integrated Programming Environment") benutzen zu müssen. Das habe ich mir nicht zusammengegoogelt, sondern das weiß ich aus eigener Erfahrung. Daß Microchip die für die Pickit-Serie entwickelte, C#-basierte Standalone-Software nicht mehr weiterentwickelt, ist zwar bedauerlich, braucht einen aber nicht zu stören, so lange es um ältere Prozessoren geht oder solche, für die irgend jemand mit dem PICkit 2 Device Data File Editor ein passendes PK2DeviceFile.dat erzeugt hat. [...] > Wir reden hier nicht von einem ARM mit >128 K Flash, sondern von ganz > winzig kleinen µC mit maximal 256 möglichen Programmschritten und 16 > Byte RAM und 3 (DREI) I/O-Pins im SOT23-5. Dafür nen C-Compiler > anwerfen? Ich halte das für voll daneben, quasi wieder mal mit Kanonen > auf Spatzen. Wir reden hier von einem Mikrocontroller, in den das in vom TO spezifizierte Programm, wenn man es einfach so in C herunterschreibt, drei mal hintereinander hineinpasst. Selbst wenn man es mit dem gekrippelten kostenlosen XC8 von Microchip übersetzt. Und das ist nicht dahergeschwätzt, quasi "voll daneben", sondern das habe ich weiter oben im Thread praktisch demonstriert. Noch Fragen? PS: Ich finde nicht, daß man sich irgendwem gegenüber reichtfertigen muß oder sollte, wenn man manche Sachen ganz oder teilweise mittels eines Assemblers angeht und finde die ensprechenden Pawlowschen Reflexe angesichts jedweder Erwähnung z.T. ziemlich überzogen. Jedoch beginne ich langsam zu verstehen, woher diese Reflexe kommen ...
W.S. schrieb: > > Wir reden hier nicht von einem ARM mit >128 K Flash, sondern von ganz > winzig kleinen µC mit maximal 256 möglichen Programmschritten und 16 > Byte RAM und 3 (DREI) I/O-Pins im SOT23-5. Dafür nen C-Compiler > anwerfen? Ich halte das für voll daneben, quasi wieder mal mit Kanonen > auf Spatzen. > Hallo, dann melde ich micht auch, C oder C++ ist gegenüber Assembler bequemer, für MEINE Anwendung im Hobbybereich ist das sonst ziemlich egal. Ein Chip mit etwas mehr Programmflash ist nicht nenenswert teurer, und ein evtl. suboptimaler code des compilers spielt auch keine Rolle da bei meinem Anwendungen weit überwiegend auf Ereignisse, Eingänge oder Zeiten, gewartet wird. Vor 30 Jahren war bei Werkezugmaschinenbahnsteuerungen mit Geometrie aus Kurven, Koordinatentransformationen in Echtzeit ( noch vor dem Coprozessor für die 68000-Motorola-CPU ) das anders. Da wurde genau abgewägt Tabelle und Interpolation oder Reihenentwicklung ähnlich des cordic-algorhitmus. Jedes Bit war mit Vornamen bekannt. C ist bequemer für den Einstieg, wer dagegen viele Projekte in Assembler mit der GLEICHEN CPU programmiert(e) hat(te) Biblotheken für nützliche subroutinen, z.B. auch timer. Am Ede der Hauptroutine suborutinen für solche Funktionen als reentry abgespeichert, timer, hex to ascii, ln, sin usw.. Im Prinzip war das dann Anwendung einer eigenen "Hochsprache" bedingt.
Wolfgang S. schrieb: > W.S. schrieb: > >> >> Wir reden hier nicht von einem ARM mit >128 K Flash, sondern von ganz >> winzig kleinen µC mit maximal 256 möglichen Programmschritten und 16 >> Byte RAM und 3 (DREI) I/O-Pins im SOT23-5. Dafür nen C-Compiler >> anwerfen? Ich halte das für voll daneben, quasi wieder mal mit Kanonen >> auf Spatzen. Btw., wo bekommt man denn diese Sonderausführung mit fünf Pins? Microchip baut die 10F200 mit 4 (in Worten "vier") I/O-Pins und schreibt im Datenblatt explizit "6-PIN SOT-23". > Hallo, > dann melde ich micht auch, C oder C++ ist gegenüber Assembler bequemer, > für MEINE Anwendung im Hobbybereich ist das sonst ziemlich egal. > > Ein Chip mit etwas mehr Programmflash ist nicht nenenswert teurer, und > ein evtl. suboptimaler code des compilers spielt auch keine Rolle da bei > meinem Anwendungen weit überwiegend auf Ereignisse, Eingänge oder > Zeiten, gewartet wird. Bei den ganz kleinen Prozessoren ist das Ende der Fahnenstange schnell erreicht. Ich benutze gerne den 12F1840 in DIP-8 und bin schon mal daran gescheitert, daß es keine bzgl. Flash resp. RAM größere Version mit diesen Eigenschaften (i.e. Achtbeiner, DIP, 5V) gibt, jedenfalls keine, die Reichelt anbietet. > > > Vor 30 Jahren war bei Werkezugmaschinenbahnsteuerungen mit Geometrie aus > Kurven, Koordinatentransformationen in Echtzeit ( noch vor dem > Coprozessor für die 68000-Motorola-CPU ) das anders. Da wurde genau > abgewägt Tabelle und Interpolation oder Reihenentwicklung ähnlich des > cordic-algorhitmus. > > Jedes Bit war mit Vornamen bekannt. > > > C ist bequemer für den Einstieg, wer dagegen viele Projekte in Assembler > mit der GLEICHEN CPU programmiert(e) hat(te) Biblotheken für nützliche > subroutinen, z.B. auch timer. Am Ede der Hauptroutine suborutinen für > solche Funktionen als reentry abgespeichert, timer, hex to ascii, ln, > sin usw.. Im Prinzip war das dann Anwendung einer eigenen "Hochsprache" > bedingt. Gäbe es brauchbar Makroprozessoren bzw. genauer gesagt -phasen in den Assemblern, so wie seinerzeit beim IBM-ASM-H, könnte man auch heute noch darüber nachdenken, sich quasi kleine DSL mit dem Assembler zu bauen. So wie die Dinge liegen, ist man in Ermangelung von dergl. fast immer besser bedient, mit C zu beginnen und nur bei Bedarf auf den Assembler auszuweichen.
Hallo, egal ob Assembler oder C, C++ ( andere Hochsprachen werden kaum unterstützt ), einige Gatterunktionen mit Prozessoren zu erledigen kommt ir leichter vor als es mit flash-FPGA versuchen zuwollen.
Wolfgang S. schrieb: > Hallo, egal ob Assembler oder C, C++... Und wie weit bist du? Vergiss am besten die ganzen "Alternativen" die hier wie immer aufgezeigt werden. Nimm zumindest am Anfang das einfachste, MPLABX und den eingebauten Assembler oder eben den XC8 Compiler. Wozu sich noch mit zusätzlichen unnötigen Problemen plagen. Es ist mir eh ein Rätsel wozu ein "Bastler" eine zusätzliche Programmiersoftware braucht und sich mit Kommandozeilen-Tools rum schlagen muss. Da nehme ich die IDE, die hat zwei Knöpfe, einen für den Debug- und einen für den Programmier- Mode und gut ist. Eine reines Programmiertool (wie z.B. IPE) brauche ich erst dann, wenn ich ein fertiges Programm habe (das Hex-File), das ich auf weitere Controller brennen will.
Für so ein kleines ASM Projekt (und evtl. auch C), um das es hier geht, würde ich eher noch die alte MPLAB IDE 8.92 (ohne "X") empfehlen - die ist viel weniger aufgebläht und deutlich übersichtlicher. Ich finde, das Debuggen (im Simulator) in der alten IDE ist deutlich weniger umständlich und im Gegensatz zum neuen MPLAB X kann man sich im Logic-Analyzer zwei Cursor anzeigen lassen und so z.B. mal eben die Zeit zwischen zwei Signalflanken messen, oder auch in ASM mit STEP OUT aus einem Unterprogramm springen (solche Kleinigkeiten hält Microchip offenbar für unwichtig, mich nervt das ungemein!)
Thomas E. schrieb: > (solche Kleinigkeiten hält Microchip > offenbar für unwichtig, mich nervt das ungemein!) Mich nervt auch so manches. Oder hat zumindest genervt. Irgendwann sieht man dann aber auch die Vorteile der neuen Tools. Übersichtlicher finde ich persönlich eigentlich MPLAB-X, auch wenn ich das erst 5-6 Jahre benutze und das alte MPLAB davor bestimmt doppelt so lange.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.