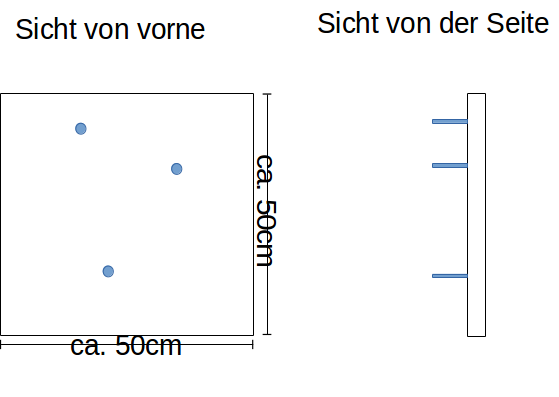
Hallo Leute, ich hoffe ich bin hier Richtig, und es gibt dieses Thema nicht schon, hab zwar schon gesucht, aber nichts passendes gefunden. Ich will auf einer Platte die Position (2-dim) von 3 auftreffenden "Stiften" bestimmen. Die Position der Stifte kann bei jedem auftreffen anders sein. Die Genauigkeit der Positionsbestimmung sollte im niedrigen Millimeterbereich liegen. Die Stifte sind aus Metall und Plastik. Mein erster Gedanke war die Position mittels 2 Kameras zu bestimmen. Was sich aber als nicht so günstig heraus gestellt hat, da sich die Lichtverhältnisse ändern können. Wäre die Positionsbestimmung mit Ultraschall-Sensoren oder ähnlichem möglich? Oder hat jemand noch eine andere Idee? Gruß Christian
Angehängte Dateien:
-

Skizze_1.png
17 KB
Erster Gedanke: kapazitive oder resistive Displayfolie? Vielleicht gibt es die in dieser Größe.
Das geht leider nicht. Ich kann nichts auf die Platte aufbringen. Die Positionsbestimmung muss irgendwie von den Rändern erfolgen.
Christian L. schrieb: > Hallo Leute, > > ich hoffe ich bin hier Richtig, und es gibt dieses Thema nicht schon, > hab zwar schon gesucht, aber nichts passendes gefunden. > > Ich will auf einer Platte die Position (2-dim) von 3 auftreffenden > "Stiften" bestimmen. Die Position der Stifte kann bei jedem auftreffen > anders sein. Die Genauigkeit der Positionsbestimmung sollte im niedrigen > Millimeterbereich liegen. Die Stifte sind aus Metall und Plastik. > Hoert sich nach Dart an. > Mein erster Gedanke war die Position mittels 2 Kameras zu bestimmen. Was > sich aber als nicht so günstig heraus gestellt hat, da sich die > Lichtverhältnisse ändern können. > Hoert sich nach Dart in eine Kneipe an. > Wäre die Positionsbestimmung mit Ultraschall-Sensoren oder ähnlichem > möglich? Oder hat jemand noch eine andere Idee? > Du koenntest auf fie Ruckseite der Pfeile oder was das auch immer ist reflektierendes Papier aufkleben. Das sollte sich aus Bildern einfach rausfiltern lassen. Auf den Hintergrund dann natuerlich auch Referenzpunkte. Mark > Gruß > > Christian
Falls die Stifte nacheinander auf die Platte treffen, könnte man die Position durch drei oder mehr Erschütterungssensoren (Piezoelemente?) ermitteln. Dazu würden die mikroskopischen Zeitunterschiede und Amplitudenunterschiede miteinander verglichen und die Position trianguliert.
Jan Sittinger schrieb: > Dazu würden die mikroskopischen Zeitunterschiede und > Amplitudenunterschiede miteinander verglichen und die Position > trianguliert. Im "niedrigen Millimeterbereich"? Mach mal :-) Ich seh da nur zwei eindimensionale Laserscanner.
Christian L. schrieb: > von 3 auftreffenden "Stiften" Wie schnell hintereinander treffen die Stifte auf? Wie stark sind die Erschütterungen? Kannst du etwas an der Plattenseite anbringen?
Ja vom Prinzip her ähnlich wie Dart. Aber an den Stiften möchte ich nichts anbringen. Wie genau wäre die Bestimmung mit den Erschütterungssensoren denn möglich? Die Stifte treffen ungefähr alle 10 Sekunden auf. Die Erschütterungen sollten etwas stärker sein als beim Auftreffen eines Dartpfeiles. Ja an den Seiten der Platte kann ich etwas anbringen.
Je nach Material musst Du die longitudinale Schallgeschwindigkeit ermitteln. Durch das Auftreffen eines Pfeils erreichen die Schallwellen alle Sensoren zu unterschiedlichen Zeiten (außer wenn der Pfeil im Zentrum auftrifft). Die daraus resultierenden Strecken ergeben jeweils einen Radius um jeden Sensor (mit +- Toleranz) und die Schnittfläche aller wiederum ein Polygon, in dem die Aufschlagsstelle ist. Wenn Du googelst, findest Du Tabellen mit Schallgeschwindigkeiten in verschiedenen Medien.
Die Toleranz und damit die Genauigkeit, musst Du empirisch ermitteln
Zwei linearachsen mit geeigneten Reflexionslichtschranken? Die Fahren das x-y-profil ab und über den Messwert der Lichtschranke kannst du die Positionen ermitteln. Ist auch rotatorisch vorstellbar. D.h. du hast eine Reflexionslichtschranke auf einem Servo o.Ä. montiert der sich Dreht. Dann ist aber eine hinreichende Winkelauflösung notwendig. Und etwas trigonometrie ... Optisch mit Kameras ist aber auch machbar, da ist eher die Frage wieviel Vorerfahrung und/oder Einarbeitungswille vorhanden ist. Stichwort OpenCV etc. Beleuchtungsprobleme sind indivduell zu betrachten. Denkbar ist auch eine kombination aus sichtbarem Laser und einer Kamera. Z.B. zwei Kameras schauen je auf x und y seite, Ein Linienlaser trifft auf die Bolzen. Dann musst du nur noch die Laser erkennen und die Mittelpunkte je 1-Dimensional ermitteln, was relativ trivial ist. Eine Komplexe kalibrierung kann man sich ggf. auch durch vorheriges Vermessen sparen.
Was heißt die Lichtverhältnisse ändern sich? ;) Mit OpenCV kann man so einiges machen. Evtl. auch mit einer Kamera ohne Infrarotfilter und IR beleuchtung arbeiten.
Hört sich für mich nach einem Problem an, das man per Triangulation lösen kann. Man könnte 2 Laserdioden/scharf gebündelte Lichtquellen drehbar neben der Scheibe anbringen. Auf dem kompletten Halbkreis der gegenüberliegenden Seite Phototransistoren. Gesucht wird der Punkt, an dem beide Lichtstrahlen nicht mehr auf der anderen Seite ankommen. Da ist natürlich wie immer das Problem wenn 2 Dartpfeile direkt nebeneinander in einer Linie zur Lichtquelle sind. Wenn du zusätzlich dazu noch mit einem Accelerometer die Erschütterungen beim Aufprall erkenne kannst, lässt sich das aber lösen. So rein vom Gefühl her ist aber die Lösung mit Kameras die bessere. Wenn die Pfeile Licht reflektieren, kann man die ganz gut erkennen. Kannst du ein Testmuster auf den Pfeilen anbringen?
Ich danke euch erst mal allen für eure Ideen... wirklich ein ganz tolles Forum. Habe mir das alles noch einmal durch den Kopf gehen lassen und würde es am liebsten mit den Kameras weiter versuchen. Ein Muster auf den Pfeilen anzubringen wäre sicherlich zu Testzwecken möglich aber im allgemeinen nicht. Mit ändernden Lichtverhältnissen meine ich dass beispielsweise mal eine Lichtquelle direkt drauf zielt, mal ist es eher dunkel. Momentan experimentiere ich mit 2 einfachen Webcams rum(Microsoft Lifecam 3000HD und Logitech, Inc. QuickCam Ultra Vision). Aber die Ergebnisse sind noch nicht ideal. Futzi schrieb: > Evtl. auch mit einer Kamera ohne Infrarotfilter und IR beleuchtung > arbeiten. Kannst du mir da eine Empfehlung für eine "bezahlbare" Kamera geben? Grüße Christian
Christian L. schrieb: > Futzi schrieb: >> Evtl. auch mit einer Kamera ohne Infrarotfilter und IR beleuchtung >> arbeiten. > > Kannst du mir da eine Empfehlung für eine "bezahlbare" Kamera geben? er meinte wohl den IR Filter aus der Kamera ausbauen. Im nahen IR sind Kameras ja auch so schon recht empfindlich. Halte man eine Kamera vom Handy gegen eine Fernbedienung.
Christian L. schrieb: > Kannst du mir da eine Empfehlung für eine "bezahlbare" Kamera geben? Schau Dir auch mal die Raspberry Pi Camera NoIR an!
@Christian L. (sundown2k) Wahrscheinlich mit Kanonen auf Spatzen, aber: Es gibt auch Industriekameras mit einem sehr hohen Dynamikbereich und ggf. integrierter Bild(vor)verarbeitung. Ist i.d.R. nicht billig aber man kann schon einige 'kleine Wunder' hervorzaubern. Stichwort wäre z.B. 'High Dynamic Range Camera'.
Jan Sittinger schrieb: > könnte man die > Position durch drei oder mehr Erschütterungssensoren (Piezoelemente?) > ermitteln. Dazu würden die mikroskopischen Zeitunterschiede und > Amplitudenunterschiede miteinander verglichen und die Position > trianguliert. Nix Triangulation! Da du nur Zeitdifferenzen messen kannst, ergeben sich als Standlinien Hyperbeln zwischn den Mikrofonen, und in deren Schnittpunkten befindet sich der Ursprung der Schallwellen. Das Verfahren ist als Hyperbelnavigation gut bekannt https://de.wikipedia.org/wiki/Hyperbelnavigation aber zur Lösung der Gleichung ist einige Rechenleistung und genaue Zeitmessung erforderlich. Ich habe Zweifel, ob ein Arduino dafür genügend leistungsfähig ist. Mein Ansatz wäre die Verwendung eines RaspberryPi evtl. mit zusätzlicher Hardware für die Zeitmessungen. Für diesen gibts auch eine hochauflösende Kamera ohne IR-Filter.
Bei der Erschütterungssensorlösung solltet ihr aber bedenken. Er will eine Genauigkeit im "niedrigen mm Bereich". bei einer Kantenlänge von ca. 50cm hat man einen Abstand von bis über 50cm zu dem Sensor. Das bedeutet der Gesamtfehler der Messung muss deutlich unter 1% kommen. Da stellst sich dann schon mal die Frage wie reproduzierbar und homogen ist denn die Schalllaufzeit in der Platte. Wenn das z.B. Pressspan ist, dann ist dei Schalllaufzeit nicht homogen und auch nicht reproduzierbar konstant. Insofern wird die geforderte Genauigkeit zumindest 'interessant'.
Ja, das geht mit drei Mikrophonen. Been there, done that. Du mißt die Differenzen der Schalllaufzeiten, die Standlinien liegen auf Hyperbeln, wie erwähnt. Die Mathematik zur Berechnung der Position aus den Differenzen ist nicht ganz trivial, aber vier Grundrechenarten und die Wurzel reichen aus. Ich habe das mal bei Matheplanet.de erfragt, dort der erste Hit bei der Suche nach 'Hyperbelnavigation'. Dort habe ich auch Matlab script zur Berechnung gepostet. hth Cheers Detlef
An den PI mit der Kamera hatte ich auch schon gedacht. Aber ich müsste mindestens 2 Kameras davon betreiben können. Und glaube das geht mit dem PI nicht wirklich zufriedenstellend? Weiterhin muss die Kamera einen möglichst großen Bildwinkel haben, damit sie nicht so weit weg positioniert werden muss.
Detlef _. schrieb: > Ja, das geht mit drei Mikrophonen. > > hth > Cheers > Detlef Was ich mich bei den Mikrophonen generell Frage, wäre das System nicht recht anfällig gegen Umgebungsgeräusche? Gruß Christian
Ja, kann sein, dass das System anfällig ist gegen Umgebungsgeräusche, das hängt natürlich von den Umgebungsgeräuschen ab. Die Laufzeitdifferenzen müssen 'richtig' bestimmt werden, sonst funzt das nicht. Ic habe damals die Position eines Mikrophons in Bezug auf drei Lautsprecher bestimmt, da konnte ich die 'Geräusche' so wählen, dass mir die Umgebung nicht in die Quere gekommne ist. Cheers Detlef
Christian L. schrieb: > Detlef _. schrieb: >> Ja, das geht mit drei Mikrophonen. >> >> hth >> Cheers >> Detlef > > Was ich mich bei den Mikrophonen generell Frage, wäre das System nicht > recht anfällig gegen Umgebungsgeräusche? > > Gruß Christian Ja, aber man nimmt da eh Ultraschall, damit das keinen nervt. Und dann kann man per Bandpass nur diesen Bereich des Spektrums für die Berechnung heranziehen. LORAN-C per Ultraschalllotung...spannend ;)
Hmm, das mit dem Schall/Ultraschall hört sich auch ganz interessant an. Glaube da muss ich mich erst einmal ein bisschen einlesen...
>>>LORAN-C per Ultraschalllotung...spannend ;) Ja, finde ich auch. Hatte hier Beitrag "Indoor Navigation mit dem Handy" mal ein Projekt in diese Richtung vorgeschlagen. Das würde funktionieren, aber Androi Programmieren kann ich immer noch nicht Cheers Detlef
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.