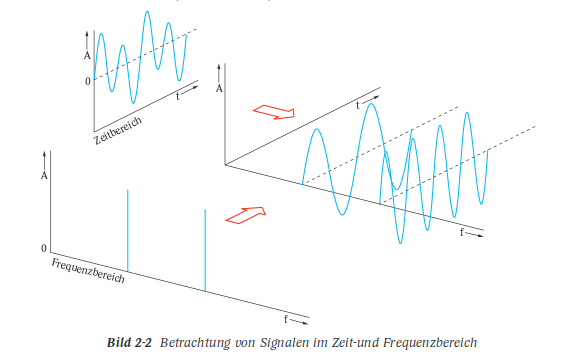
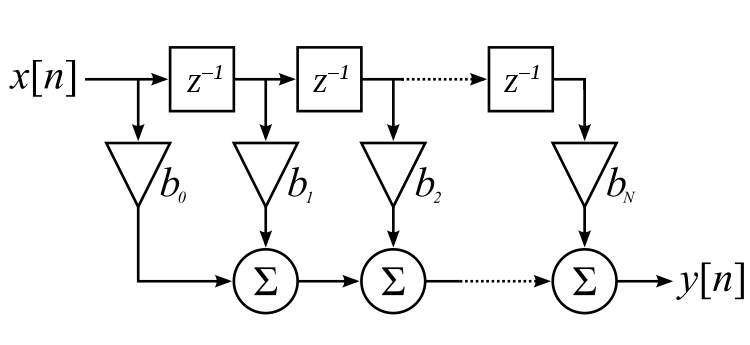
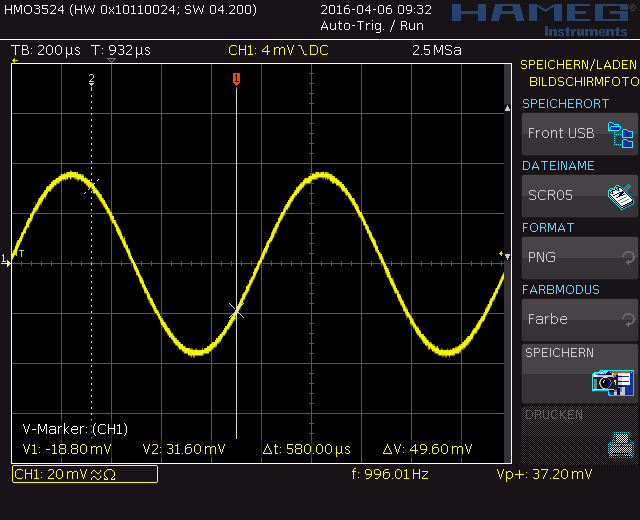
Ich verstehe nicht wie es sein kann das der FIR-Filter Frequenzen Verstärkt oder Dämpft je nach gewählten Koeffizienten. Ich finde auch keine Quellen, in dem dieses Phänomen erläutert wird. Nach dem hochgeladen Bild wird der FIR Filter realisiert. Eingangssignal - Sinus - Signal 100 mV, Frequenz 10 MHz. Nun verwende ich verschiedene Anzahlen von Koeffizienten. Ein Koeffizient : z.B. 1 Zwei Koeffizienten : 0.5 und 0.5 ... Fünf Koeffizienten : 0.2 0.2 0.2 0.2 0.2 Alle diese Signale würden auf dem Ozilloskop identisch aussehen. Nun verwende ich die Sweep funktion für das Sinus Signal damit ich einen Bestimmten Frequenzbereich erfüllt habe. Sagen wir von 100 hz bis 200 MHz. Ich betrachte den Ausgang auf dem Spektrumanalysator und erkenne eindeutig unterschiede. Warum ? Eigentlich dürfte Unabhängig von der Frequenz alle Amplituden Gleich Groß sein siehe Bild 1. Ich habe mir diesen ganzen Vorgang auch mal in der Theorie Überlegt. Ich habe eine Signal von 1 , 0.5 , 1. Das sich Periodisch wiederholt. Das bedeutet das jeder Koeffitient die selbe auswirkung hat. Unabhängig der Frequenz. Ich Weiß das der FIR Filter Funktioniert nur es intressiert mich enorm warum das so ist ?
Angehängte Dateien:
-

Zeit_und_Frequenzbereich.png
37 KB -

FIR_FIlter.png
14 KB
Du bildest einen entsprechend der Koeffizienten gewichteten Durchschnitt über mehrere Eingangswerte, das ist prinzipiell das gleiche was ein RC-Tiefpass macht.
Schau Dir mal dir Gleichung zu Deiner Filterstruktur an. Der FIR berechnet einen gewichteten Mittelwert über 1 bzw. 2 bzw. 5 aufeinanderfolgende Samples in Deinen Beispielen. D.h. alles, was sich z.B. innnerhalb der 5 Samples temporär ändert (also hohe Frequenzanteile), wird glattgebügelt, und nur die langsamen Änderungen, die sich über mehr als 5 Samples erstrecken, werden vom Filter nicht erfasst.
Die Abtastfrequenz spielt natürlich auch eine Rolle(!)
Beispiel mit den 2 Koeffizienten:
y[n] = 0.5 * x[n] + 0.5 * x[n-1]
Y[z] = 0.5 * X[z] + 0.5 * z^(-1)* X[z]
= X[z] * (0.5 + 0.5 * z^(-1))
Übertragungsfunktion
A[z] = Y[z] / X[z] = 0.5 + 0.5 * z^(-1)
einsetzten z^(-1) = exp(j*w*Ta) w ... 2 pi f
Ta .. T_abtast
Daraus Ortskurve, Amplitudengang und Phasengang berechnen
f= 0: A[z] = 1+0j Betrag=1 Phase=0°
f=1/4 f_abtast A[z] = 0.5+0.5j Betrag=0.707 Phase=45°
f=1/2 f_abtast A[z] = 0+0j Betrag=0 Phase=90°
Angehängte Dateien:
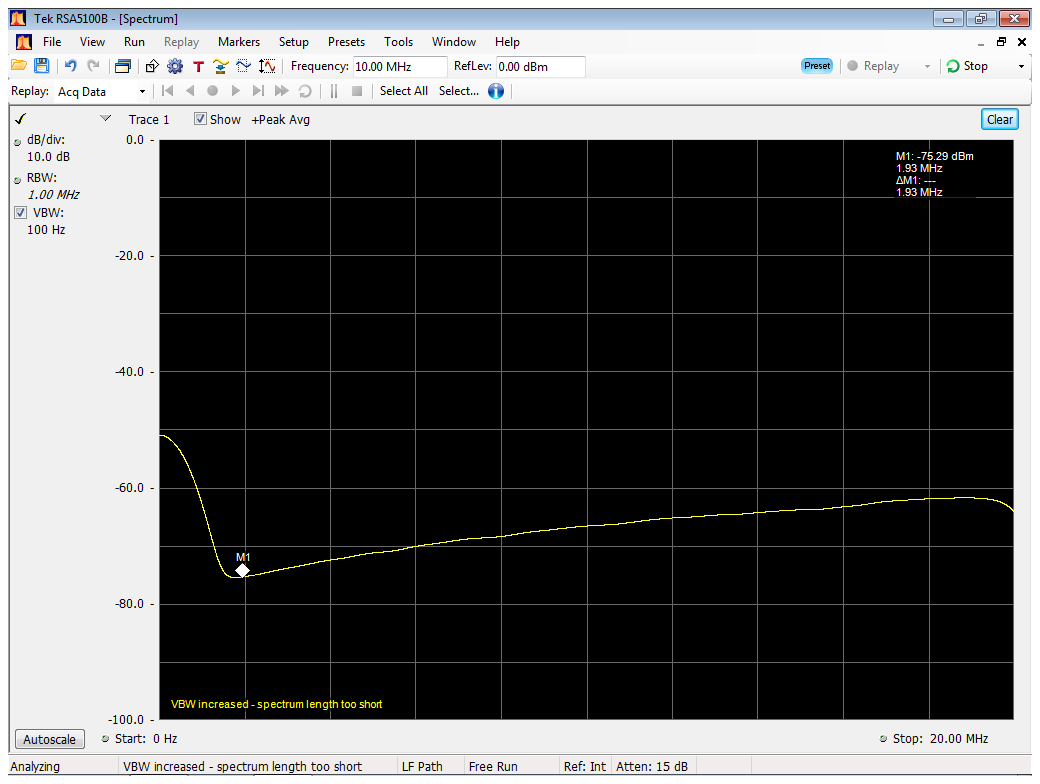
Vancouver schrieb: > alles, was sich > z.B. innnerhalb der 5 Samples temporär ändert Was meinst du damit ? Die Samples bleiben gleich dadurch das ich sie als eine periodische benutzte. Vancouver schrieb: > und nur die langsamen Änderungen, > die sich über mehr als 5 Samples erstrecken, werden vom Filter nicht > erfasst. Die 5 Samples Wiederholen sich aufgrund der Periodischen Funktion. Klar bildet der FIR Filter den Mittelwert. Aber damit ändert sich doch nicht die jeweilige Amplitude ? Ich verstehe die Erklährungen nicht. Mal ein beispiel. Das Angehangene Bild sind die von den Koeffizieten 0.1 bzw -0.1. Die erhöhung der Amplitude im bereich 0 Hz. kommt von dem Messgerät. Also keine Panik :) FIR Filter ist ein gleitender Mittelwert Filter. Aber ich verstehe nicht warum er bestimmte Frequenzen verstärkt bzw. dämpft.
"Was meinst du damit ? Die Samples bleiben gleich dadurch das ich sie als eine periodische benutzte." Du hast doch ein zeitlich veränderliches Eingangssignal (Sinus 10MHz). Warum sollten Deine Samples gleich bleiben? Sie ändern sich ständig, wenn auch periodisch. "Die 5 Samples Wiederholen sich aufgrund der Periodischen Funktion." Ja, eben. "Klar bildet der FIR Filter den Mittelwert. Aber damit ändert sich doch nicht die jeweilige Amplitude ?" Ok, nehmen wir an, du misst einmal pro Minute die Spannung einer Solarzelle auf dem Dach. Dann bildest Du den gleitenden Mittelwert der letzten 5 Minuten. Wenn Sich die Spannung aufgrund schnell vorbei fliegender Wolken alle 10 Sekunden ändert, dann siehst Du im Mittelwert nichts davon. Wenn es hingegen am Vormittag wolkig ist, am Mittag die Sonne scheint und abends regnet, dann wirst Du den langfristigen Verlauf sehen. Dabei spielt es keine Rolle, ob die Wetteränderung periodisch ist oder nicht. Hohe Frequenzanteile werden bei der Mittelwertbildung verschluckt, niedrige Anteile nicht. Deswegen hat der Filter dieser Art eine Tiefpass-Charakteristik, er dämpft hohe Frequenzen. Die Samplerate spielt dabei natürlich eine entscheidende Rolle, wie Reinhard M. oben geschrieben hat. "Das Angehangene Bild sind die von den Koeffizieten 0.1 bzw -0.1. Die " Das versteh ich nicht ganz... Du hast dort einen Filter mit zwei Taps und als Koeffizienten 0.1 und -0.1 verwendet? Und welche Abtastrate hast Du verwendet? Grundsätzlich gilt für einen einfachen Mittelwertfilter: Hohe Frequenzen=Schnelle Änderungen werden durch die Mittelwertbildung rausgemittelt und verschwinden.
Angehängte Dateien:
-

heKoeff____-0.1_0.1_mal.PNG
47 KB -

0.1_und_-0.1_Ozi.PNG
9,5 KB -

0.1_Ozi.PNG
12 KB -

SpektrumAnalzsatorNichtAngeschlossen.PNG
50 KB

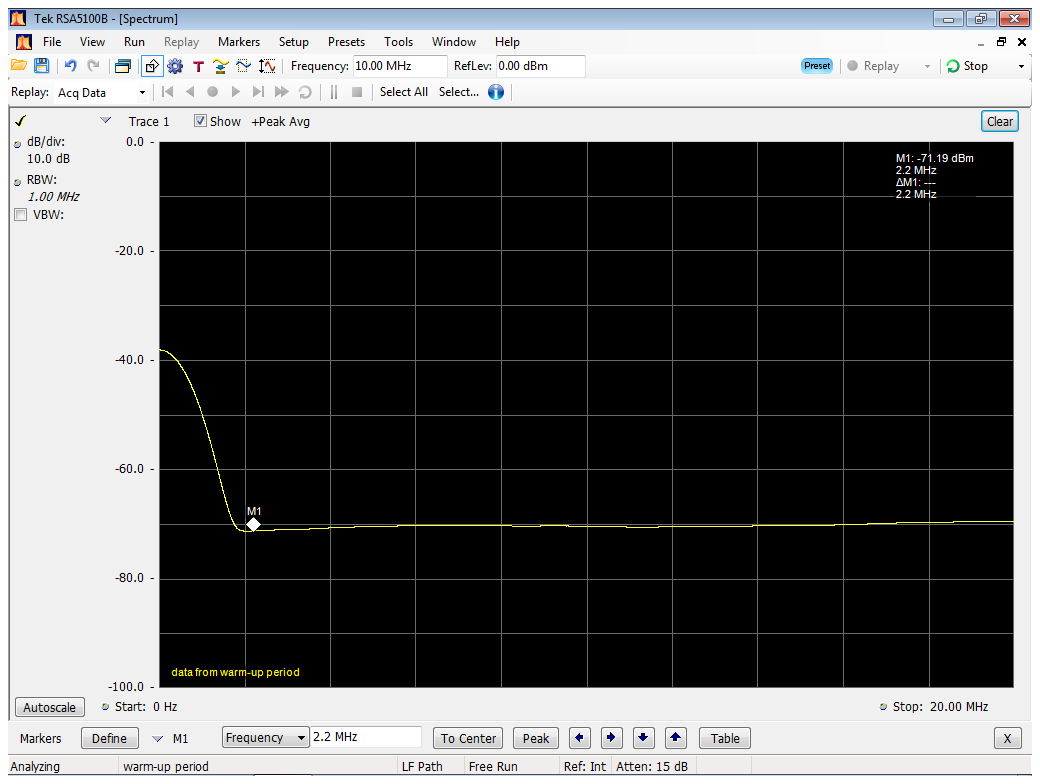
Vancouver schrieb: > Du hast doch ein zeitlich veränderliches Eingangssignal (Sinus 10MHz). > Warum sollten Deine Samples gleich bleiben? Sie ändern sich ständig, > wenn auch periodisch. Vancouver schrieb: > Der FIR > berechnet einen gewichteten Mittelwert über 1 bzw. 2 bzw. 5 > aufeinanderfolgende Samples in Deinen Beispielen. D.h. alles, was sich > z.B. innnerhalb der 5 Samples temporär ändert (also hohe > Frequenzanteile), wird glattgebügelt, Reinhard M. schrieb: > Die Abtastfrequenz spielt natürlich auch eine Rolle(!) Ich hatte im Bezug auf das Periodische Signal einen Gedanken Fehler. Die Abtastfrequenz ist Ausschlag gebend. Aber für mich ist das ein Phänomen was immer auftritt. Wenn ich eine zu geringe Abtastfrequenz haben gehen Bestimmte Signalanteile verloren. Das Nyquist-Shannon-Abtasttheorem beschreibt das die Frequenz von größer 2*fmax Abgetastet werden muss. Damit ein exaktes zeitdiskretes Signal erzeugt werden kann. Das habe ich natürlich Absolut vergessen. Der A/D Wandler hat eine Abtastfrequenz von 125 Mhz. Also deutlich höher als die benutzten Frequenzen des Sinus. Mithilfe der Sweep Funktion generierte ich eine Sinus Signal von 100 hz bis 20 Mhz.(siehe Bild) Daraus folgt. 2*fmax=2*20 Mhz = 40 Mhz. Das ist deutlich unter der Abtast Frequenz von 125 Mhz. Bernhard schrieb: > Koeffizienten gewichteten Durchschnitt > über mehrere Eingangswerte, das ist prinzipiell das gleiche was ein > RC-Tiefpass macht. Danke für eure Hilfe. Ich konnte dadurch jetzt besser Verständnis erreichen. Also durch das benutzten von einem Koeffizieten werden die der Gleitende Mittelwert gebildet. Also bein einem Wert von 0.1 stärkere Dämpfung als bei 0.9. Eigentlich selbst erklährend aber ich konnte das damals nicht richtig verstehen. Wenn ich ein Sinus-Signal mit den Koeffietienten -0.1 und 0.1 auf dem Ozzililoskop betrachte. sehe ich kein Ausgangssignal. Für mich ist das verständlich. Durch den VZ wechsel subtrahieren sich die beiden Sinus signale. Dadurch das das Signal Periodisch ist. Aber im Spektrumanalysator ist zu erkennen das Frequenzen im höheren Bereich besser Durchgelassen werden ? Wie kann das sein das sein ? Eigentlich müssten doch alle Amplituden 0 sein. Damit ich euch nicht verwirre habe ich auch noch nur das Bild ohne Signal des Spektrumanalysators hochgeladen. Das ist einfach vom Messgerät. Vancouver schrieb: > Das versteh ich nicht ganz... Du hast dort einen Filter mit zwei Taps > und als Koeffizienten > 0.1 und -0.1 verwendet? Und welche Abtastrate hast Du verwendet? Abtastfrequenz ist 125 MHz und der Erste Koeffizient ist 0.1 der Zweite Koeffitient -0.1 Das sollte die Beschrirftung bedeuten.
b0 = 0.1 b1 = -0.1 H(z) = 0.1 - 0.1 * exp(jwT) bei f = 0 --> H[z] = 0.1 - 0.1 * 1 = 0 bei f = f_abtast/2 --> H[z] = 0.2 --> das ist ein Hochpassverhalten.
Oder weniger mathematisch erklärt: Auf den Ausgang gelangt immer die Differenz vom aktuellen Eingangssignal und das um einen Takt verzögerte Eingangssignal. Wenn jetzt die Differenz groß ist (hohe Frequenz) gibt es ein größeres Ausgangssignal als bei kleinem Unterschied (niedrige Frequenz). PS. in dem Formeln muss es heißen exp( -jwT ) --MINUS-- Das entscheidet ob die Ortskurve in der unteren oder in der oberen Halbebene liegt. Der Amplitudengang (Betrag) stimmt trotzdem. Ich hoffe es einigermaßen verständlich rübergebracht zu haben ;-)
Mal ganz einfach zu Fuss: a) Tiefpassfilter: Koeffizienten b_0=1 und b_1=1 (gleitender Mittelwert über 2 Werte) Eingangssequenz 1 1 1 1 1 1 1 1 1 1 1 1 ... Ausgangssequenz 1 2 2 2 2 2 2 2 2 2 2 2 ... Signal wird um 2 verstärkt Eingangssequenz 1 -1 1 -1 1 -1 1 -1 1 -1 1 -1 ... Ausgangssequenz 1 0 0 0 0 0 0 0 0 0 0 0 ... Signal wird vollsständig gedämpft. Übungsaufgabe: Das gleiche mit Hochpass: b_0=1, b_1=-1 machen.
>>>>>
Dadurch das das Signal Periodisch ist. Aber im Spektrumanalysator ist zu
erkennen das Frequenzen im höheren Bereich besser Durchgelassen werden ?
Wie kann das sein das sein ? Eigentlich müssten doch alle Amplituden 0
sein.
Das sagtest Du für die Koeffizienten +0.1 und -0.1. Du berechnest damit
y(n)=0.1*x(n-1)-0.1*x(n)
Damit differenzierst Du das Signal, Du bildest quasi die Ableitung. Für
ne Gleichspannung kommt immer 0 raus, je höher die Frequenz umso steiler
steigt der Sinus an umso höher ist das Ausgangssignal -> Hochpass.
Anderes Beispiel: FIR Filter, alle Koeff. sind 1. Der zwingt das
Ausgangssignal auf 0 wenn GENAU eine ganzzahlige Anzahl Wellen des
Sinus in die Kette reinpassen. Das erzeugt diese Kammstruktur des
Frequenzgangs.
Cheers
Detlef
Huber W. schrieb: > Ich verstehe nicht wie es sein kann das der FIR-Filter Frequenzen > Verstärkt oder Dämpft je nach gewählten Koeffizienten. Ich finde auch > keine Quellen, in dem dieses Phänomen erläutert wird. Schau dir mal dieses Video an: https://www.youtube.com/watch?v=FnpkBE4kJ6Q
Reinhard M. schrieb: > b0 = 0.1 > b1 = -0.1 > > H(z) = 0.1 - 0.1 * exp(jwT) > > bei f = 0 --> H[z] = 0.1 - 0.1 * 1 = 0 > bei f = f_abtast/2 --> H[z] = 0.2 > > --> das ist ein Hochpassverhalten. Danke Reimhard M. Jetzt habe ich es verstanden. Ich habe nur einfach den Phasengang nicht betrachtet.
Wenn ich mir das Thema so ansehe, dann bin ich froh, daß ich mit Analogtechnik angefangen habe und filtern konnte, bevor es an die Micocontroller und die Digitaltechnik ging. Ehrlich gesagt, habe ich echte Probleme, mir vorzustellen, dass ich mir die Thematik allein von der abstrakten Theorie her hätte erabeiten können, ohne schon eine Art von Anschauung zu haben. Wenn das in der Uni so präsentiert worden wäre, hätte ich wohl das Handtuch geworfen.
Audiomann schrieb: > Wenn das in der Uni so präsentiert worden wäre, > hätte ich wohl das Handtuch geworfen. Ja, das ginge mir genauso. Ich habe das alles sehr verkürzt dargestellt und einige Zwischenschritte weggelassen. Wer wirklich interessiert ist, da kann ich nur den Tietze-Schenk Kapitel "Digitale Filter" empfehlen. Das ist die beste deutschsprachige Einführung in das Thema, die ich kenne.
Hp M. schrieb: > Schau dir mal dieses Video an: > Youtube-Video "How to build digital filters, a simplified explanation" werde ich mir anschauen danke. Reinhard M. schrieb: > Wer wirklich interessiert ist, da kann ich nur den Tietze-Schenk > Kapitel "Digitale Filter" empfehlen. > Das ist die beste deutschsprachige Einführung in das Thema, die ich > kenne. Das werde ich mir aufjedenfall besorgen. Danke für den Tipp.
ich suche dieses video: https://www.youtube.com/watch?v=FnpkBE4kJ6Q es ist leider nicht mehr da. hat es einer vieleicht gesichert?
Reinhard M. schrieb: > y[n] = 0.5 * x[n] + 0.5 * x[n-1] Das ist aber kein FIR-Filter, sondern ein IIR.
Markus W. schrieb: > Das ist aber kein FIR-Filter, sondern ein IIR. Solange y rechts nicht auftaucht, eher nicht...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.