Hall community. Ich habe ein Problem mit der Auswertung eines HC-SR04
Ultraschallsensors. Ich habe es schon auf mehrere Art und Weisen
versucht aber es will einfach nicht so wie ich es will.
Der erste Versuch war mit Timer ICP Mode. Da bin ich aber so dermaßen
auf die schnautze gefallen das ich mir gedacht hab ich versuchs einmal
auf die einfache und primitive Art und weise.
1
.include "tn2313def.inc"
2
.org 0x000 RJMP Main
3
4
.equ trigger=0
5
.equ echo=1
6
.equ sensorport=portb
7
.equ sensorddr=ddrb
8
.equ sensorpin=pinb
9
.def temp1=r16
10
.def temp2=r17
11
.def cm=r20
12
.equ LED=2
13
.org 0x020
14
Main:
15
ldi r16, low(RAMEND)
16
out SPL, r16
17
18
sbi sensorddr, LED
19
sbi sensorddr, trigger ;;Trigger als Ausgang
20
rcall triggerimpuls
21
rcall echowait
22
rcall auswertung
23
rcall wait50ms
24
rjmp Main
25
26
auswertung:
27
cpi cm, 20
28
brge aus
29
cpi cm, 20
30
brlo an
31
ret
32
33
an:
34
sbi sensorport, LED
35
ret
36
37
aus:
38
cbi sensorport, LED
39
ret
40
41
wait50ms:
42
43
ldi r18, 65
44
ldi r19, 239
45
L12: dec r19
46
brne L12
47
dec r18
48
brne L12
49
ret
50
51
52
53
54
55
triggerimpuls:
56
sbi sensorport, trigger
57
58
ldi temp1, 3
59
marker01:
60
nop
61
dec temp1
62
brne marker01
63
64
cbi sensorport, trigger
65
ldi cm, 0
66
ret
67
68
echowait:
69
sbis sensorpin, echo
70
rjmp echowait
71
messen:
72
;117 ticks entsprechen 2 cm entfernung bei 1 mhz
73
74
ldi r18, 37 ;;
75
L1: dec r18 ;;
76
brne L1 ;;
77
nop ;; Das sins 112
78
79
inc cm
80
inc cm
81
sbic sensorpin, echo
82
rjmp messen
83
ret
Diese Methode Funktioniert nun aber auch nicht zuferlässig. Hat jemand
von euch vllt verbesserungsvorschläge oder Tipps wie man das ganze doch
noch funktionstüchtig bekommt.
#mfg Daniel
Hallo,
Du hast sicher eine Erklärung dafür, warum Du diese Initialisierung
1
ldi r16, low(RAMEND)
2
out SPL, r16
3
4
sbi sensorddr, LED
5
sbi sensorddr, trigger ;;Trigger als Ausgang
in Deiner Mess-Schleife immer wieder aufrufst?
Was meinst Du mit "nicht zuverlässig"?
Du weißt, daß BRGE einen signed (also das Signed-Flag testet) und BRLO
einen unsigned (also das Carry-Flag testet) Vergleich macht?
Damit passiert also nicht unbedingt das, was Du erwartest.
Gruß aus Berlin
Michael
Ich habe nun das ganze etwas ausgebessert. Desweiteren ist noch eine
kleine KontrollLED mit implementiert die mir anzeigt wann er in die 50ms
warteschleife springt. Diese sollte ja dann gleichmäßig blincken was sie
aber nicht tut sondern eher unregelmäßig aufläuchtet. Das ist mir z.B.
ein Rätsel weil zwischen 20cm und 30 cm distanz der Zeitliche
unterschied wohl von der Blinckfrequenz zu vernachläsigen wäre. Mit
nicht zuverläßig meine ich das die LED welche mir eine distanz unter20cm
anzeigen soll (gegen VCC geschalten) mehr oder weniger treibt was sie
will...mal läuchtet sie mal nicht. Vllt hast du dafür einen
Lösungsansatz. Ich werd morgen mal ein kleines Video hochladen um das
ganze mal etwas zu demonstrieren. Was mir auch noch fehlt ist eine
kleine Hysterese. Vergleichbar mit der Enprellung eines Tasters. Den an
einem gewissen Punkt weis er garnicht mehr was er will.
mfg DNAiel
dannyboy1994 schrieb:> Ich habe nun das ganze etwas ausgebessert. Desweiteren ist noch eine> kleine KontrollLED mit implementiert die mir anzeigt wann er in die 50ms
Versuche es mal mit mind. 65ms Abstand zwischen den Messungen.
Ich glaube, dass 50ms einfach zu schnell ist für kurze Entfernungen.
Nun funktioniert es wie gewünscht. Einzig die Angst das er eventuell
einmal in der Schleife hängen bleiben könnte bleibt. Gibt es noch
sicherheitsmechanismen die ich mit einfügen könnte?
An alle die den Code kopieren möchten. Nehmt ihn. Freut mich das er euch
weiter hilft. Anpassen müsst ihr ihn allerdings selbst. Es läuft auf 1
Mhz. bei 8 Mhz entspricht ein wert "cm" nicht mehr waren 2 sondern
wahren 16 cm und die schleife für den triggerimpuls muss 8 mal so lang
sein.
mfg Daniel
dannyboy1994 schrieb:> An alle die den Code kopieren möchten. Nehmt ihn. Freut mich das er euch> weiter hilft. Anpassen müsst ihr ihn allerdings selbst. Es läuft auf 1
Keine Ursache, gern geschehen.
Hallo,
um es vllt einfacher zu machen und um deine Software zu entlasten lass
das ding doch einfach über den INT0/1 oder die PCINTx empfangen.
Pin(Trigger) auf High setzen, in dem man nur mit den internen Pullups
arbeitet, Counter starten und übern INTx auf die fallende Flanke warten.
Im Int nur die Zeit(Register) auslesen einmal rechts shiften (/2) und
fertig.
Auf das shiften kann man verzichten wenn man als Grundlage pro Bit nicht
29,15µs nimmt sondern 58,31µs/Bit entspricht 1cm (mit Rücksicht auf den
Hin/Rückweg)
dannyboy1994 schrieb:> Einzig die Angst das er eventuell einmal in der Schleife hängen> bleiben könnte bleibt.
Timeout oder ganz brutal - Watchdog (falls dein µC soetwas hat)
Hi
Jupp, ich habe gelesen, daß der Thread bereits einige Tage nicht mehr
ganz frisch ist.
Wie stabil sind die gemessenen Werte bei Euch?
Selber habe ich probiert, den Timer bei steigender Flanke zu starten und
bei fallender Flanke zu stoppen.
Heraus kamen Messungen mit +/- 200 Ticks
Beim anderen Versuch, läuft der Timer durchgehend, wird nur beim
Triggern auf Null gesetzt und bei wechselnder Flanke am Echo-Pin
gesichert.
Leider habe ich auch hier eine starke Schwankung in ähnlichem Umfang.
Eine Mittelung brachte mir auch noch Nichts, hier war aber wohl ein
Registerüberlauf schuld.
(erste Messung übernehmen, danach alte Messung x 14 + neue Messung x 2,
Das durch 16)
Bei Messwerten bis 6000 sollte hier eigentlich Nichts passieren, die
Anzeige meinte aber, diese Gedanken nicht teilen zu müssen.
Geschrieben in Assembler auf einem ATTiny45 mit AVR-Studio 4 (das
Neueste lässt sich in der VM nicht installieren).
Ich habe vor, mit diesen Schall-Entfernungsmessern unter Anderem meinen
Heizöl-Spiegel 'im Auge' zu behalten - es wäre halt einfach nur nett,
wenn die Anzeige stabil wäre.
MfG
Ich vergaß:
Timer wird als 16bit benutzt, im Timer-Überlauf-Interrupt wird ein
separates Register hochgezählt.
Angezeigt werden die Messwerte dezimal auf einem 7-Seg-Display (MAX7219,
8 Stellen).
MfG
posti schrieb:> Wie stabil sind die gemessenen Werte bei Euch?
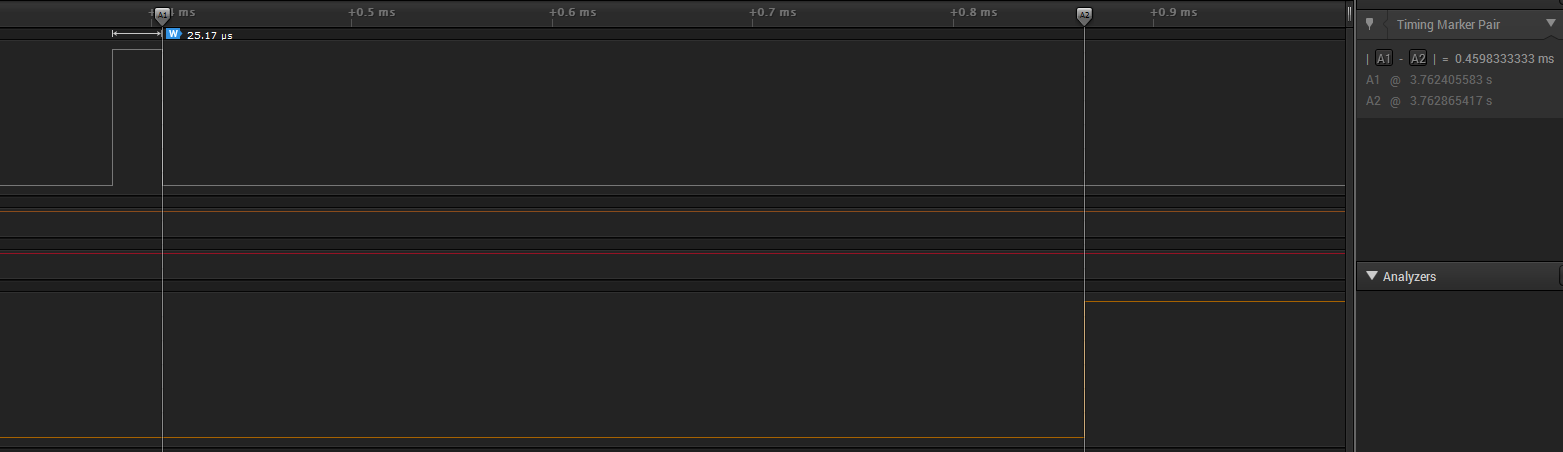
+/- 1us.
Allerdings:
60ms zwischen Messungen.
Triggerpuls = 25us.
Pulsende <=> Echobegin = 458us bis 460us.
Und es funzt ohne Probleme, Fehler im mm-Bereich.
Hier ein Screenshot, damit du die Zeit vom Pulsende bis Echobegin
abziehen kannst.
Marc V. schrieb:> Hier ein Screenshot, damit du die Zeit vom Pulsende bis Echobegin> abziehen kannst.
Kann man auch mittels PinChange-Interrupt lösen, dann muss man keine
Zeiten abziehen ;)
M. K. schrieb:> Kann man auch mittels PinChange-Interrupt lösen, dann muss man keine> Zeiten abziehen ;)
Ich mache es so, aber der Fragesteller nicht:
posti schrieb:> Beim anderen Versuch, läuft der Timer durchgehend, wird nur beim> Triggern auf Null gesetzt und bei wechselnder Flanke am Echo-Pin> gesichert.
Hi
Danke für die Antworten
Eine Auflösung zumindest bis in die mm hatte ich schwer erhoffe.
Mit dem PCINT hatte ich 'Es' ja auch probiert, dort mit starten/stoppen
des Timer, wo meine Werte ähnlich zittern waren.
Die aktuellen Timer-Werte werden/wurden bei jedem PCINT je nach
Pin-Zustand gesichert als Anfang und Ende.
Der Timer bis zum Anfang schwankte um 4 Ticks, was ich mir zwar nicht
erklären kann (der 40kHz-Burst wird ja wohl identisch ablaufen), aber
mit leben kann.
Womit sicher gestellt ist, daß der Fehler wieder vorm Monitor sitzt.
Akut muß Das Problem aber noch warten, wollte ein Erfolg und frage einen
DHT22 ab (kürzeste Verweilzeit 30µs) - noch wollen mich die Steinchen
aber nicht ganz ernst nehmen :P
(zumindest klappt 'no Slave' wenn kein Sensor gefunden wird - werte ich
Mal als Teilerfolg :/ )
MfG