Hallo zusammen, ich möchte an einen STM32F103CBT6 über UART2 ein GPS-Modul anschließen (NZ GPS von UBLOX an einen NAZE32 Flightcontroller). Das GPS-Modul wird mit 5v betrieben und gibt auf RX/TX 5V raus. Der µC wird hingegen mit 3.3V betrieben. Gehe ich recht in der Annahme, dass ich besser einen Lever-Converter dazwischen schalten sollte? Im Netz findet man viele Schaltungen zur obengenannten Kombination, die RX/TX direkt anschließen? Kann das richtig sein? Nimmt der µC womöglich Schaden wenn ich das so mache oder sinkt dann "nur" die Qualität der Erkennung der Signale? Danke vorab für Tipps und Gruß Ralf
An 5-Volt toleranten Pins kannst Du auch 5-Volt anlegen, solange der STM32 selbst Spannung hat. Falls der Uart auch Signal liefert, wenn der STM ohne Spannung ist, brauchst Du Strombegrenzungswiderstaende. Checke das Datenblat genau!
Mit dem Datenblatt habe ich so meine Schwierigkeiten. Ich bin kein Techniker und das Ding ist sehr umfangreich und sehr technisch :-) Ich habe dort z.B. das gefunden: "Clock, reset and supply management – 2.0 to 3.6 V application supply and I/Os " Die UARTs würde ich mal als I/Os bezeichnen - oder? Demnach max. 3.6V?
Oh, weiter unten steht: "Up to 80 fast I/O ports – 26/37/51/80 I/Os, all mappable on 16 external interrupt vectors and almost all 5 V-tolerant" Das passt doch besser! Also sollten 5V ja kein Problem sein - oder?
Wenn das GPS-Module was empfangen soll, dann solltest du die andere Seite auch mal gegenrechnen... also µC 3,3 Volt raus und GPS 5,0 V TTL... Sauber? Oft will man aber nur empfangen...
Es reicht nur der Empfang. RX vom GPS wird in einigen Schaltbildern auf GND gelegt. Ich bin mir aber nach wie vor nicht sicher, ob mit den oben zitierten Angaben aus dem Datenblatt auch die USART-Schnittstelle gemeint ist!?
Ralf schrieb: > Es reicht nur der Empfang. RX vom GPS wird in einigen Schaltbildern auf > GND gelegt. > > Ich bin mir aber nach wie vor nicht sicher, ob mit den oben zitierten > Angaben aus dem Datenblatt auch die USART-Schnittstelle gemeint ist!? Im Datenblatt unter "Pinouts and pin description" ist eine Tabelle mit allen Pins und deren Funktionen. Dort ist auch eine Spalte für I/O Level. FT bedeuted dort 5V Tolerant. Dort kannst du ablesen, dass PA0 bis PA4, also die Standard USART2 Pins, nicht 5V Tolerant sind. Weiter unten gibts dann noch die alternativen pins, PD3 bis PD7, die auf USART2 "geremapt" werden können. Und die haben ein "FT" in der Spalte, sind also 5V Tolerant. Immer auch die Anmerkungen beachten, manche Pins sind nicht immer 5V Tolerant. Zum Beispiel fällt die 5V Toleranz generell weg, wenn die Pins als Analogeingang konfiguriert werden.
Basti schrieb: > Wenn das GPS-Module was empfangen soll, dann solltest du die andere > Seite auch mal gegenrechnen... also µC 3,3 Volt raus und GPS 5,0 V > TTL... Sauber? 5 Volt TTL ist kompatibel mit 3.3 Volt CMOS. Richtige TTL Ausgaenge kommen nicht an die Betriebsspannung, sondern nur bis auf 2 Diodenstrecken weniger. Daher sind die noetigen Eingangspegel mit 3.3 Volt CMOS Ausgang kompatibel. 5 Volt CMOS Eingang mit 3.3 Volt CMOS Ausgang wird unter normalen Bedingungen gehen, aber nicht ganz Datenblattkonform. 3.3 Volt Ausgang auf 5 Volt CMOS Eingang bedeutet aber immer hoehere Querstrom im Eingang und ist fuer Low Power ein No-No.
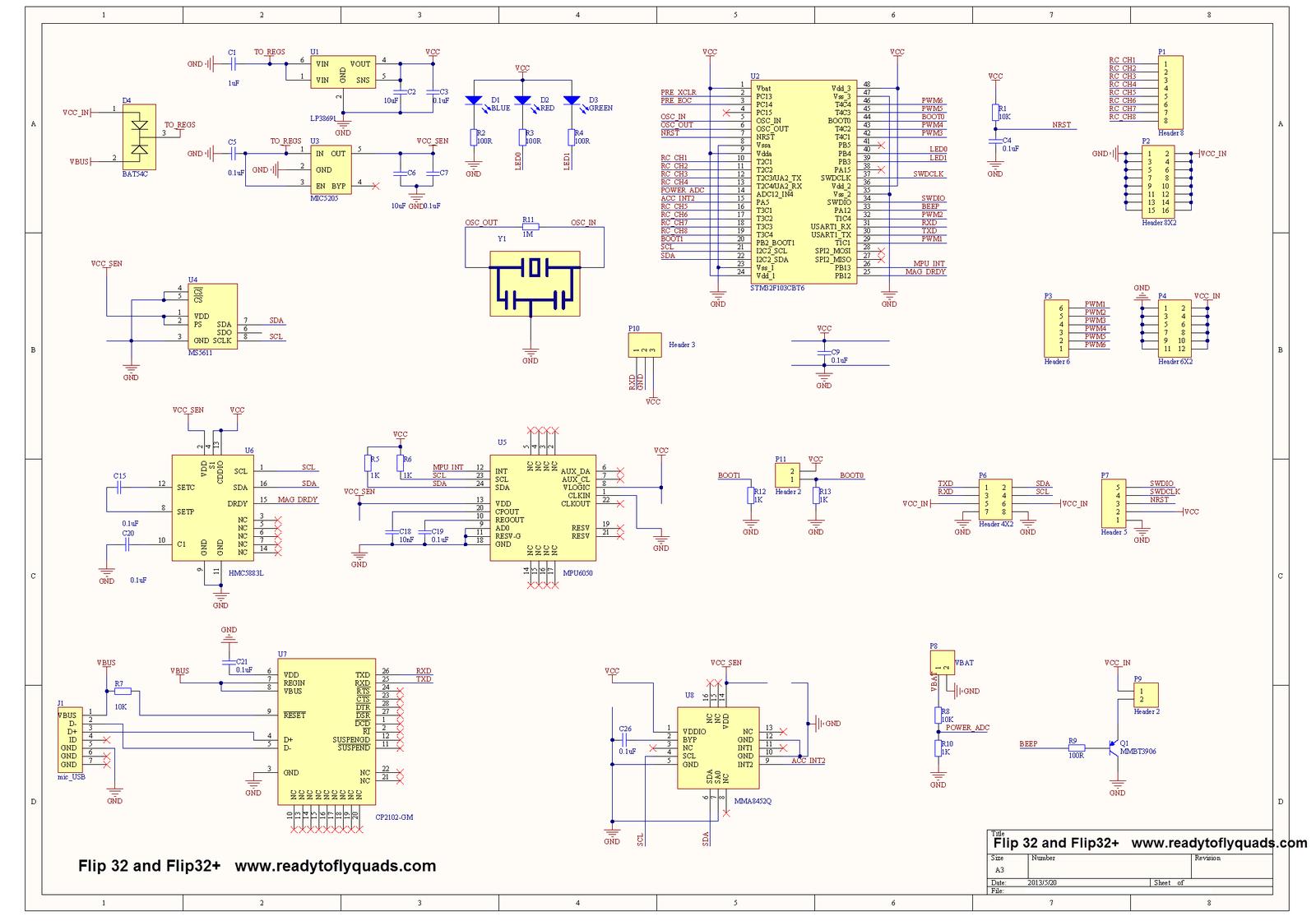
Christoph S. schrieb: > Dort kannst du ablesen, dass PA0 bis PA4, also die Standard USART2 Pins, > nicht 5V Tolerant sind. OK, wenn ich folgenden Schaltplan korrekt interpretiere, dann sind das PA2 und PA3, die für USART2 verwendet werden. Zumindest schließe ich dort das GPS an (RC Channel3 und RC Channel4). http://static.rcgroups.net/forums/attachments/2/7/9/8/1/5/a5796215-218-FLIP32.jpg Also nicht 5V Tolerant :( Ich hatte das gestern in gutem Glauben bereits so in Betrieb, also mit 5V. GPS fix habe ich bekommen und alles scheint zu funktionieren. Glück gehabt? Ich sollte wohl einen Level Shifter davor schalten - oder was empfehlt ihr?
{kind=link}
Verwendest Du analoge Funktionen? Dann machen Dir die Injection currents die analogen Funktionen erratisch. Wenn nicht, dann kannst Du mit einem Serienwiderstand die Injection currents auf einen erlaubten Wert begrenzen. Wenn es nur langsam sein soll, kannst Du auch einen Spannungsteiler vorsehen. Am saubersten sind aber Pegelumsetzer.
Nein, analoge Funktionen verwende ich nicht. Es geht ja nur um die
Datenleitung vom GPS-Modul zum Flightcontroller. Das läuft mit 9600 Baud
(geht aber bis zu 115200 Baud).
Ich habe nun einen Pegelumsetzer bestellt und werde denn einbauen. Dann
bin ich auf der sicheren Seite. An einer Drohne ist die Flugsteuerung ja
ein sicherheitsrelevantes Bauteil, daher möchte ich das auf jeden Fall
datenblattkonform betreiben!
Vielen Dank für die schnelle und fachkundige Beratung! Nun kann ich das
guten Gewissens umbauen/betreiben und habe auch noch etwas über die
Interpretation von Datenblättern gelernt ("FT"...).
Grüße
Ralf
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.