Es scheint Du hast in MATLAB eine analoge Zustandsregelung simuliert.
Die kann man schon auf einem uC programmieren, es kann dann aber zu
numerischen Fehlern kommen. Die übliche Vorgehensweise ist, die
Zustandsregelung in MATLAB zu diskretisieren mit einer Abtastzeit T z.B.
mit Zero-order-Hold [Ad,Bd,Cd,Dd]=c2dm(A,B,C,D,T,'zoh')
Dann werden aus den Ableitungen Differenzen und man muss nicht mehr
numerisch integrieren, es ist einfach eine do-while Schleife: x(n) =
(Ad-BdKd) x(n-1) + Bd W R
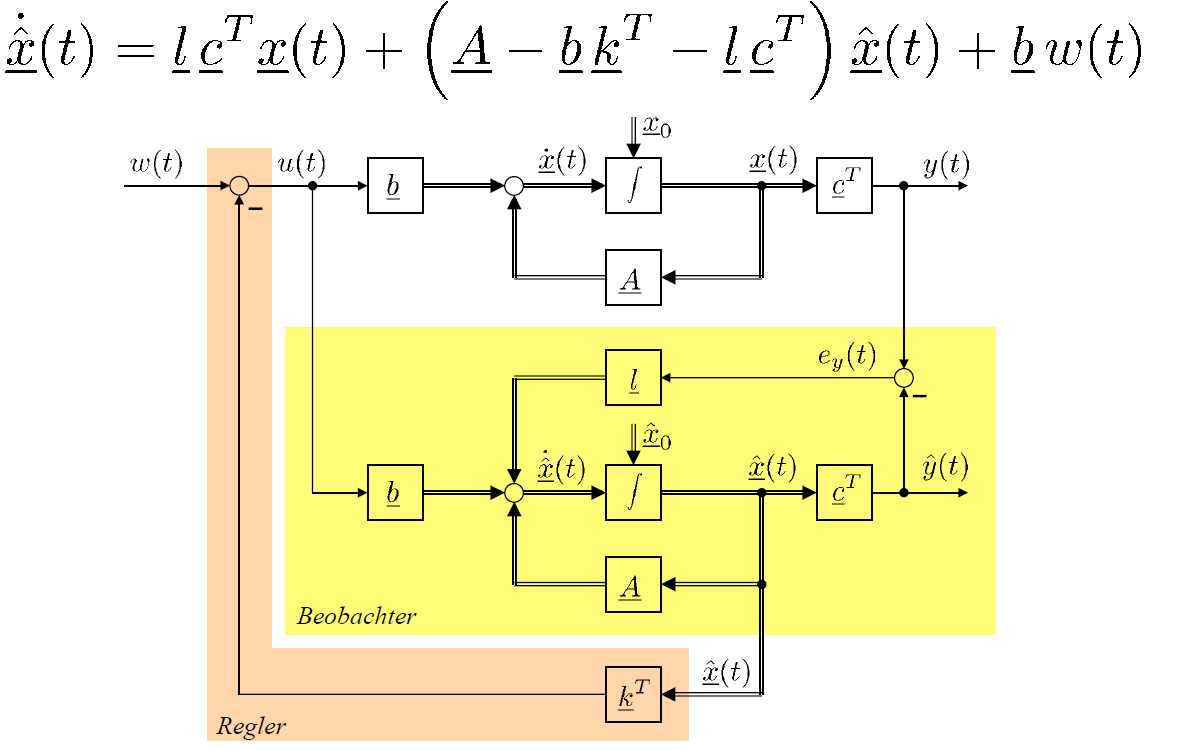
Bei der Zustandsregelung per uC ist dann ja normalerweise ein
physikalisches System angeschlossen und y(n) wird gemessen und nicht
mehr simuliert. Der Beobachter soll dann eine Systemkopie mit Ausgang
y^(n) erstellen, die für die Rückkopplung in die Regelung verwendet
wird. Wenn das gemessene y(n) und das in MATLAB simulierte y(n)
weitgehend übereinstimmen, dann sollte tatsächlich das u(n) vom uC mit
dem aus MATLAB ähnlich sein.