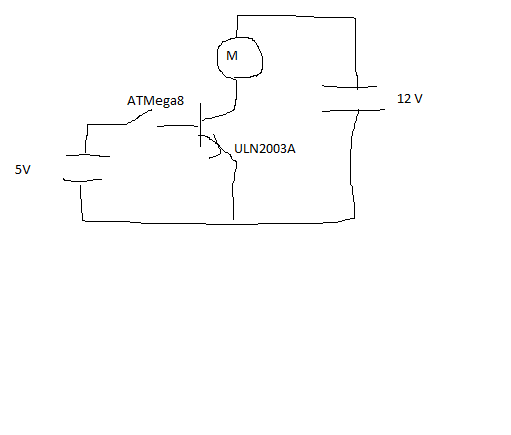
Hi, mit einem Freund bastle ich gerade eine Schrittmotorsteuerung. Dafür haben wir uns den hier http://www.ebay.de/itm/390981841545?_trksid=p2060353.m2749.l2649&ssPageName=STRK%3AMEBIDX%3AIT geholt und steuern ihn mittels ATMega8 sowie ULN2003A an. Unser Code ist (vereinfacht nur vier Schritte) hier zu finden: http://pastebin.com/cvgJrtqD Die grobe Schaltung findet sich im Anhang Die 5 V betreiben den ATMega8 dessen PIND5-7 und PINB0 an den ULN2003A gehen hinter dem dann die Anschlüsse des Motors stecken. Der Anschluss des ULN2003A hält sich an die Anleitung http://www.geeetech.com/wiki/index.php/Stepper_Motor_5V_4-Phase_5-Wire_%26_ULN2003_Driver_Board_for_Arduino . Dieser bewegt sich zwar (etwa 4 Umdrehungen/Min und von Hand anhaltbar) aber sehr langsam und mit geringem Drehmoment. Die 12 V kommen aus meinem Labormessgerät und sollten eigentlich den nötigen Strom für den Motor liefern. Dieser zieht laut Netzteilanzeige jedoch nur 30-40 mA. Das Common-Wire hat einne Widerstand von ~245 Ohm zu allen anderen Drähten und die Spulen haben einen Widerstand von ca. ~489 Ohm, also ziemlich genau das Doppelte. Wir können uns schwer vorstellen, dass das Drehmoment und die Drehzahl so gering sein soll. Wenn wir den Delay im Code auf unter 10 ms setzen funktioniert die Ansteuerung scheinbar nicht mehr (wir können dann keine Drehung erkennen auch wenn der Motor dann vibriert). Hat jemand eine Idee? Vielen Dank für jede Hilfe!
Angehängte Dateien:
-

example_schaltung.png
2,3 KB
Schrittmotore werden im "Strom-chopper" betrieb mit möglichst hoher Spannung betrieben. Der Treiberbaustein ist das wichtigste. Konstante Spannung ist nicht sinnvoll für hohe Drehzahl.
Laut Ebay Angabe: Motor Nennsopannung 12 V Motor Nennstrom 600mA entweder stimmt da deine Messung von 245 Ohm oder das Datenblatt nicht. Bei 12 V und 245 Ohm fließen gerade mal 49 mA. Irgend was passt da nicht.
Der Motor ist schon OK so. Schau dir das Datenblatt dazu an. Der kann nicht mehr. Die Ebay angaben sich Quatsch. Bei den Kräften haben sie wohl auf das m vor dem N (mN) vergessen. Ebenso ist es beim Strom.
uwe schrieb: > Schrittmotore werden im "Strom-chopper" betrieb mit möglichst > hoher > Spannung betrieben. Der Treiberbaustein ist das wichtigste. Konstante > Spannung ist nicht sinnvoll für hohe Drehzahl. Die Ebayanzeige nennt 12 V als Nennspannung. Meinst du ich sollte höhere ausprobieren? Und mit nicht konstanter Spannung meinst du eine PMW-Ansteuerung? aGast schrieb: > Laut Ebay Angabe: > Motor Nennsopannung 12 V > Motor Nennstrom 600mA > > entweder stimmt da deine Messung von 245 Ohm oder das Datenblatt nicht. > Bei 12 V und 245 Ohm fließen gerade mal 49 mA. > Irgend was passt da nicht. Mein Freund und ich haben es beide separat gemessen, es sind 245 Ohm (Common) bzw. 490 Ohm bei den anderen Drahtpaaren. Würde auch grob zu den 12 V und ~30-40 mA passen. Hubert G. schrieb: > Der Motor ist schon OK so. > Schau dir das Datenblatt dazu an. Der kann nicht mehr. > > Die Ebay angaben sich Quatsch. Bei den Kräften haben sie wohl auf das m > vor dem N (mN) vergessen. Ebenso ist es beim Strom. Ok, damit ich dich richtige verstehe: Wir machen da schon grob richtig, nur liefert der Motor echt nicht mehr? Habt ihr dann ne Empfehlung für nen Schrittmotor den ich zum Antreiben einer Drehspindel verwenden kann? (grob im Zusammenhang mit ner CNC-Bohrmaschine) Vielen Dank euch allen :)
Nehmt 24V-36V und stellt den strom am Treiber auf Inenn. Dafür braucht ihr aber einen passenden Treiber.
uwe schrieb: > Nehmt 24V-36V und stellt den strom am Treiber auf Inenn. Bringt auch nicht wirklich viel. Bei 36 V und den 245 Ohm ist der max. Strom auch nur 146mA. Da brauch er nichts auf INenn stellen. Es brauchte dem alten Ohm zufolge schon mal schlappe 147 Volt um die 600 mA durch dem Motor mit 245 Ohm zu jagen. @ Stepper: Mach das bloß nicht! Die Ibääääh Angabe von INenn und UNenn ist irgendwie voll daneben. Um eine Drehspindel wirklich mit etwas Leistung zu versorgen brauchst Du schon einen richtigen Schrittmotor und auch einen anständigen Motortreiber dazu. Das Gebastel mit dem ULN und dem Schrottstepper hilft da nicht weiter. Google mal nach NAMA Stepper, da kommt ein haufen Zeug.
aGast schrieb: > Google mal nach NAMA Stepper, da kommt ein haufen Zeug. Vielleicht morgen ein einziger Treffer: dieser hier ;-) Du hast den falschen Motor bekommen. Laut Abbildung müßte es ein Getriebemotor sein. Aber Ramsch ist er allemal!
Er meint Nema. Z.b. Nema 17. Ich glaube du hast das mit dem Steppertreiber nicht so recht verstanden. Wenn du möchtest das sich ein Schrittmotor schnell dreht muss man entsprechend schnell den Strom in den Motorspulen ändern. Das will aber vereinfacht gesagt die Motorspule nicht und zudem gibt es mit zuhnehmender Drehzahl eine Gegenspannung in der Spule. Deshalb muss man die Spule dazu zwingen in dem man den Strom der Spule regelt. Durch die Regelung wird anfangs die Maximal zur Verfügung stehende Spannung an die Spule gelegt und bei erreichen des Nennstroms die Spannung abgesenkt (In der Realität wird das Digital durch eine PWM gemacht). Dabei Spielt die Nennspannung des Motors keine Rolle. Für sowas gibts fertig IC's oder Module mit solche IC's z.B. von adafruit. Dieser werden dann meist mit Richtung und Schrittsignalen angesteuert.
Die kleinen Portalfräsen nehmen einen Nema17 oder Nema24 Motor. Ich selbst hab die Nema24 bei mir dran. Die kannst du mit der Hand ohne Hebel nicht während des Betriebs verstellen. Sie sind auch auf 1,5 A eingestellt. Such mal nach der Shapeoko X von myhobbycnc (http://myhobby-cnc.de). Da kannst du dir abschauen zwecks Treiber und den Motoren. Die Motoren gibts günstig bei Aliexpress, wenn ihr Zeit habt... Der Treiber DRV8825 funktioniert mit den Motoren schon ordentlich, auch wenn die Motoren da noch nicht ihr volles Potential entfalten. Viel Erfolg, Niine
Bergi84 schrieb: > Das will aber vereinfacht gesagt die Motorspule nicht und zudem gibt es > mit zuhnehmender Drehzahl eine Gegenspannung in der Spule. Wieso "zudem"? Das ist das selbe. Und soetwas wie Drehzahl kennt ein Schrittmotor originär gar nicht. Sonst musst du gleich Polzahl und Schrittwinkel mit reinrechnen. Die Basisgröße für einen Schrittmotor ist eher die Schrittfrequenz bei Vollschrittbetrieb. m.n. schrieb: > aGast schrieb: >> Google mal nach NAMA Stepper, da kommt ein haufen Zeug. > > Vielleicht morgen ein einziger Treffer: dieser hier ;-) Wie auch, wenn man es nicht schafft, die vier einzig wichtigen Buchstaben des Suchbegriffs fehlerfrei einzutippen. Stepper schrieb: > example_schaltung.png Zeig mal die richtige Schaltung. Ist der Motor mit seinen vier unipolaren Wicklungen richtig angeschlossen? > Unser Code ist (vereinfacht nur vier Schritte) hier zu finden: > http://pastebin.com/cvgJrtqD Traust du der Funktion zum anhängen von Code hier im Forum nicht?
Wolfgang schrieb: > Traust du der Funktion zum anhängen von Code hier im Forum nicht? Hatte befürchtet, wenn ich den Code im Text einbinde wird mein Beitrag unleserlich groß! Niine schrieb: > Die kleinen Portalfräsen nehmen einen Nema17 oder Nema24 Motor. > Ich > selbst hab die Nema24 bei mir dran. Die kannst du mit der Hand ohne > Hebel nicht während des Betriebs verstellen. > Sie sind auch auf 1,5 A eingestellt. > > Such mal nach der Shapeoko X von myhobbycnc (http://myhobby-cnc.de). Da > kannst du dir abschauen zwecks Treiber und den Motoren. Die Motoren > gibts günstig bei Aliexpress, wenn ihr Zeit habt... > > Der Treiber DRV8825 funktioniert mit den Motoren schon ordentlich, auch > wenn die Motoren da noch nicht ihr volles Potential entfalten. > > Viel Erfolg, > Niine Besten Dank, schau ich mir an. Vielen Dank an alle :)
Wolfgang schrieb: > Bergi84 schrieb: >> Das will aber vereinfacht gesagt die Motorspule nicht >> und zudem gibt es mit zuhnehmender Drehzahl eine >> Gegenspannung in der Spule. > > Wieso "zudem"? Das ist das selbe. Nein. Die (Selbst-)Induktion der Motorspule, die eine schnelle Strom- änderung verhindert, ist "Induktion der Ruhe" und tritt in derselben Art bei jeder beliebigen Spule auf -- und auch dann, wenn z.B. der Läufer blockiert ist. Die Gegenspannung in den Motorspulen entsteht durch "Induktion der Bewegung". Sie tritt nicht auf, wenn man den Läufer blockiert. > Und soetwas wie Drehzahl kennt ein Schrittmotor originär > gar nicht. Ein Schrittmotor ist einfach eine recht spezielle hochpolige Synchronmaschine; natürlich kennt die eine Drehzahl -- genauso wie einen Polradwinkel und eine Gegenspannung. Wieso auch nicht? > Sonst musst du gleich Polzahl und Schrittwinkel mit reinrechnen. Ja, muss man. Natürlich. > Die Basisgröße für einen Schrittmotor ist eher die > Schrittfrequenz bei Vollschrittbetrieb. Für jeden komplizierten Sachverhalt gibt es eine Erklärung, die einfach, offensichtlich und ... falsch ist. Der überall verbreitete Mythos des "Schrittes" beim Schrittmotor ist diese falsche Erklärung. Der "Schritt" beim Schrittmotor ist eine Rechenhilfe, weiter nichts. Begründung dazu auf Anfrage.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.