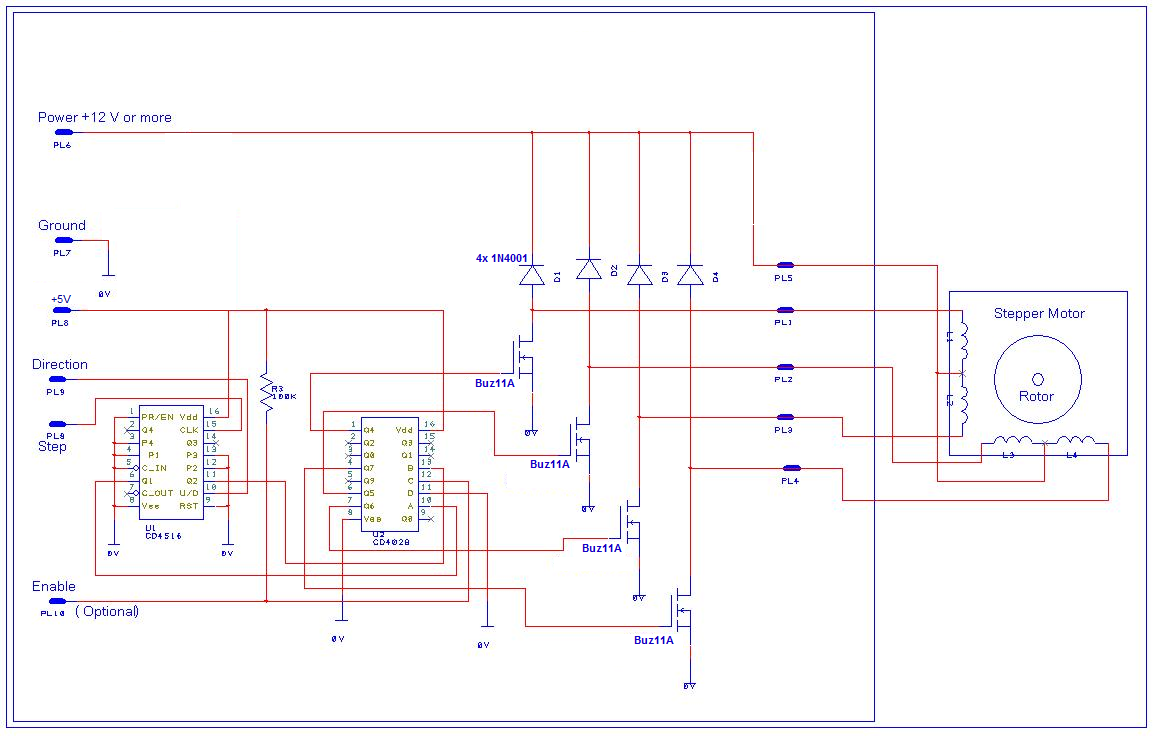
Hallo zusammen, ich habe folgendes Problem. Über das Netz habe ich mir fie Schaltung im Anhang zusammen gebaut. Je 3 Stück für 3 Achsen. Mit dieser Schaltung möchte ich drei Schrittmotoren für eine CNC-Fräse ansteuern. Ich habe mir 3 platinen fräsen lassen und diese bereits komplett bestückt. Leider ist mir im nachhinein erst aufgefeallen, dass der Strom nicht geregelt wird. Habe mich im Vorfeld nicht genug mit Schrittmotoren beschäftig. LEIDER! Zum testen habe ich Schrittmotoren mit einem Strom von 1 A. Die Wicklungen messen 6 Ohm (genaue Daten + Artikelnummer folgen) Als ich die Schaltung in Betrieb genommen habe (24V Motorspannung) wurden die FETs ziemlich heiß. Habe es riechen können :-P Bevor etwas zu Bruch kam habe ich allerdings abgeschaltet. Ich konnte einen Strom von 2 A festgestellt. Was kann ich gegen den Strom machen? Um diese Schaltungen mit unterschiedlichen Geschwindigkeiten zu nutzen muss ich den Strom regeln. Ist das richtig? Oder kann ich mit der Schaltung im Endeffekt, für mein Vorhaben, nichts anfangen? Gruß Patrick
Angehängte Dateien:
-

Stepper.png
220 KB
Schrittmotortreibermodule gibt's für ziemlich kleines Geld. Wenn man nicht relativ genau weiß was man tut, lohnt der Selbstbau meist nicht.
Patrick N. schrieb: > Was kann ich gegen den Strom machen? Versorgungsspannung reduzieren oder wie es die Stromregelung von Motoren meist macht - eine PWM fahren und durch die Induktivität der Windungen geglätteten Strom messen und darauf regeln.
Patrick N. schrieb: > Was kann ich gegen den Strom machen? Auf Basis von I = U/R kann man bei konstatem R sagen: reduziere die Motorspannung. Und nimm MOSFETs, die bei 5V nicht erst sachte zu leiten beginnen. Der BUZ11 braucht 10V zum guten Durchschalten... > Um diese Schaltungen mit unterschiedlichen Geschwindigkeiten zu nutzen > muss ich den Strom regeln. Ist das richtig? Nein. Wenn du dynamisch und mit hohen Geschwindigkeiten fahren willst, dann brauchst du einen steilen Stromanstieg. Den bekommst du nur mit hoher Versorgungsspannung. Weil dann aber wieder der Motor und die Endtufe abrauchen würde, musst du den Strom (geregelt) begrenzen.
Patrick N. schrieb: > Oder kann ich mit der Schaltung im Endeffekt, für mein Vorhaben, nichts > anfangen? Richtig. Sie ist ziemlich komplett falsch, woher auch immer du sie hast. 1. kann ein BUZ11 von 5V nicht zuverlässig eingeschaltet werden, der braucht 10V. Du brauchst einen LogicLevel MOSFET wie IRLZ34. 2. Erzeugt ein unipolarer Schrittmotor an der zweiten Spule eine gegenspannung wie ein Trafo, legt man also eine Spaule von dem Paar an 12V durch den BU11 an Masse, wird die andere Spule 12V erzeugen, draufgesetzt auf die 12V Versorgung, also an ihrem Anschluss 24V haben. Das verhindert aber deine 1N4001 Diode, im Endeffekt schliesst du die erzeugte Spulenspannung kurz und damit auch das Magnetfeld. Die 1N4001 dürfen nicht an +12V, sondern müssen zusammen an eine +15V Z-Diode die dann nach +12V geht, damit erst Spannungen über 27V angeleitet werden. 3. Dann bedienst du den Schrittmotor durch den Zähler und Decoder nur an einer Phase, im Wave-Betrieb, mit wenig Leistung und ruckelig. Nach dem Motto: Im Prinzip dreht es, aber nur als Demonstration. Durch zusätzliche Logikm könnte man aus dem Wave Betrieb weniogstens Vollschritte machen, und wenn du ENABLE sowieso nicht nutzt könnte man aus den Vollschritten auch Halbschritte machen, für runderen Motorlauf. 4. Wenn dein Motor für 6V mitz 1A ausgelegt ist und du ihn an 12V anschliesst, wird er heeiss, zu heiss. Versorge ihn mit 6V (dann reicht eine 7V5 Z-Diode). Er ist damit wneisgtens benutzbar, wenn er auch keine besonders hohen Drehzahlen erreichen kann, wie es wäre, wenn man mit deutlich überhöhter Spannung rangeht (z.B. 50V) und den Strom auf 1A begrenzt (Chopper durch Stromregelung). Aber dafür sind unipolare MOtoren sowieso nicht gedacht, das macht man also eher mit bipolaren Motoren, für die deine Schaltung gar nicht geeignet ist. -> Schmeiss die Platine lieber weg, die Motoren ebenfalls, und kaufe dir bipolare Motoren mit einen angemessenen Ansteuerchip, mit Mikroschritt, ggf. fertig als Platine http://www.ebay.de/itm/CNC-Schrittmotor-Nema-23-2-8A-Stepper-Motor-1-3Nm-185oz-in-Shaft-6-35mm-DHL-/272240962237 http://www.ebay.de/itm/1-Stuck-TB6560-3A-Schrittmotor-Treiberplatine-Treiber-Einachs-Controller-10V-35V-/141470140737 Deine Motoren passen nicht an solche Platinen.
Wie bereits erwähnt kannst du mit der Spannung spielen. Oder auf Bipolar Treiber umsteigen zum Beispiel Allegro A3981. Dort gibt es fertige Versuchsplatinen, die man einfach an einen uC anschliessen könnte. Du kannst natürlich auch unseren Bipolar- / Unipolar-Treiber kaufen, der ist aber nicht gerade sehr billig. Beste Grüsse Alain
>> Was kann ich gegen den Strom machen?
wenn Du in die Motorzuleitungen dicke Widerstände 18Ohm/ 18Watt
einbaust, kannst Du damit schon experimentieren.
Meine ersten Schrittmotorexperimente habe ich um 1982 auch so
durchgeführt.
MaWin schrieb: > Deine Motoren passen nicht an solche Platinen. Normalerweise kann man unipolare auch bipolar nutzen, nur umgekehrt nicht. MfG
MaWin schrieb: > -> Schmeiss die Platine lieber weg, die Motoren ebenfalls, und kaufe dir > bipolare Motoren mit einen angemessenen Ansteuerchip, mit Mikroschritt, > Deine Motoren passen nicht an solche Platinen. Die Motoren passen schon, nur nicht mit der Mittelanzapfung. Diese kann man aber weglassen und die Motoren als bipolar fahren.
Ersteinmal die Motorbezeichnung: 103-547-52500 von SANYO DENKI Datenblatt: http://store.lipsiasoft.com/uploads/417856_103-547-52500.pdf Lothar M. schrieb: > Der BUZ11 braucht 10V zum guten Durchschalten... Ich habe mir das Datenblatt vom BUZ11A im vorfeld angeschaut. Wo kann ich diese Spannung entnehmen? Diese Frage, ob der richtig durchschaltet ist mir auch bereits in den Sinn gekommen. MaWin schrieb: > Dann bedienst du den Schrittmotor durch den Zähler und Decoder nur an > einer Phase, im Wave-Betrieb, mit wenig Leistung und ruckelig. Wieso nur an einer Phase? Verstehe dich glaube ich falsch. Um einen Motor Unipolar anzusteuern beschalte ich den Motor doch folgendermaßen: Schritte | Spule1a | Spule1b | Spule2a | Spule2b | Common ---------+---------+---------+---------+---------+-------- Schritt1 | + | - | - | + | VCC ---------+---------+---------+---------+---------+-------- Schritt2 | + | - | + | - | VCC ---------+---------+---------+---------+---------+-------- Schritt3 | - | + | + | - | VCC ---------+---------+---------+---------+---------+-------- Schritt4 | - | + | - | + | VCC Somit habe ich doch eine komplette Umdrehung oder nicht? Tabelle von rn-wissen Wäre nett wenn du mir das mit der einen Phase genauer erklären würdest. Pieter schrieb: > wenn Du in die Motorzuleitungen dicke Widerstände 18Ohm/ 18Watt > einbaust, kannst Du damit schon experimentieren. Ist das nicht das selbe, wie die Spannung einfach herunter drehen? Dadurch senkt sich der Strom ja auch automatisch. Oder gilt das hier nicht? steptanz schrieb: > Schrittmotortreibermodule gibt's für ziemlich kleines Geld. Wenn man > nicht relativ genau weiß was man tut, lohnt der Selbstbau meist nicht. Ich möchte gerne die Schaltung selber bauen. Es geht dabei nicht um das Geld. Zumal ich niemals so günstig an die Teile komme, was ein entsprechender Treiber kosten würde, da diese ja schon günstig zu schießen sind. Ich kann auch mit dem L298 arbeiten. Habe sogar welche hier. Nur bin ich auf die Schaltung gestoßen und habe mir Gedanken dazu gemacht wie das ganze abläuft. Mit dem Zähler, dem Decoder und den FETs. Wie schon gesagt war da nur der Strom zu kurz geraten. Daher dachte ich, es wäre nun möglich diesen zu begrenzen und weiter mit diesen Platinen zu arbeiten. Mfg Patrick
Patrick N. schrieb: > Ich habe mir das Datenblatt vom BUZ11A im vorfeld angeschaut. Wo kann > ich diese Spannung entnehmen? Drain to Source On Resistance (Note 2) rDS(ON) ID = 15A, VGS = 10V (Figure 8) - 0.03 0.04 Ω Patrick N. schrieb: > Wieso nur an einer Phase? Verstehe dich glaube ich falsch. Um einen > Motor Unipolar anzusteuern beschalte ich den Motor doch folgendermaßen: > > Schritte | Spule1a | Spule1b | Spule2a | Spule2b | Common > ---------+---------+---------+---------+---------+-------- > Schritt1 | + | - | - | + | VCC > ---------+---------+---------+---------+---------+-------- > Schritt2 | + | - | + | - | VCC > ---------+---------+---------+---------+---------+-------- > Schritt3 | - | + | + | - | VCC > ---------+---------+---------+---------+---------+-------- > Schritt4 | - | + | - | + | VCC Nein, du versorgst ihn folgendermassen Schritte | Spule1a | Spule1b | Spule2a | Spule2b | Common ---------+---------+---------+---------+---------+-------- Schritt1 | + | (-) | o | o | VCC ---------+---------+---------+---------+---------+-------- Schritt2 | o | o | + | (-) | VCC ---------+---------+---------+---------+---------+-------- Schritt3 | (-) | + | o | o | VCC ---------+---------+---------+---------+---------+-------- Schritt4 | o | o | (-) | + | VCC In Klammern heisst, die Spule entwickelt transformatorisch die Gegenspannung, wenn sie könnte (durch 1N4001 verhidnert).
MaWin schrieb: > In Klammern heisst, die Spule entwickelt transformatorisch > die Gegenspannung, wenn sie könnte (durch 1N4001 verhidnert). Das macht natürlich Sinn und wurde nicht berücksichtigt. Danke
>> wenn Du in die Motorzuleitungen dicke Widerstände 18Ohm/ 18Watt >> einbaust, kannst Du damit schon experimentieren. >Ist das nicht das selbe, wie die Spannung einfach herunter drehen? >Dadurch senkt sich der Strom ja auch automatisch. Oder gilt das hier >nicht? Um den Motor (schneller) drehen zu lassen, ist ein schneller Stromanstieg in den Spulen notwendig. Da die Induktivität einer Spule aber den Stromanstieg hemmt, ist eine hohe Spannung notwendig um den Strom "durchzuprügeln". Stromanstieg 1-tau mit tau= L / R und I= U / Rgesamt Die 18R "simulieren" den Stromchopper moderner IC's. Für die 1A reicht bei den FET's 5V als Gatespannung schon aus, haben dann halt etwas Verluste. Bau die 4 Widerstände ein,experimentiere und lerne damit die Grundlagen.
Patrick N. schrieb: > Über das Netz habe ich mir fie Schaltung im > Anhang zusammen gebaut. Je 3 Stück für 3 Achsen. > Mit dieser Schaltung möchte ich drei Schrittmotoren für eine CNC-Fräse > ansteuern. Wenn Du eine solche Schaltung auf einem Steckbrett zum rumspielen aufgebaut hättest könnte ich das sehr gut verstehen.. Aber drei? Für eine Fräse? Nur so am Rand.., mit Deinen 20Ncm-Motörchen kannst Du gerade mal so einen 3D-Drucker zu gemächlicher Arbeit überreden, in einer Fräse reicht es maximal für Karton oder Balsaholz. Für dünnes Sperrholz,GFK oder CFK benötigst Du > 50Ncm, für alles andere größere Motoren ;) Aber auch beim Spielen sind Stepsticks o.ä. hilfreicher, um moderne Schrittmotortechnik verstehen zu lernen, Stichworte Mikroschritte, Chopper, Resonanzen
Die Motoren werden nicht in die Fräse eingebaut. Die eigentlichen muss ich noch bestellen. Diese kleinen habe ich hier nur rum liegen und wollte mit denen die Schaltung nur testen.
Die richtigen Motoren sond folgende: Nanotec-Munich ST5918L2008-A 4,8 V 2,0 A Damit werde ich eine Fräse bewegen können.
Patrick N. schrieb: > Damit werde ich eine Fräse bewegen können. Aha. Langsam halt. Da hast du dir einen der langsamsten Stepper ausgesucht aus der Serie. Vielleicht solltest du vor dem Kauf nochmal Grundlagen lernen. Man kann dasn nämlich AUSRECHNEN, welchen Motor man braucht (zumindest nach dem man Messwerte der Fräse ermittelt hat, wie Trägheit und Drehmoment). Und dann kann man AUSRECHNEN, welchen Schrittmotortreiberleistung man braucht und daraus kann man AUSRECHNEN welches Netzteil man benötigt. Nennt man ingenieuersmässiges Vorgehen statt trial & error, und kommt billiger.
Diesen Motor habe ich genommen, weil er in der High-Z S-1000 von CNC-Step verbaut ist. (Eilganggeschwindigkeit max. ca. 12.000 mm/min) https://www.cnc-step.de/produkte/fraesmaschinen-hz-standard/72-graviermaschine-s1000 Mag sein das dieser in der Serie einer der langsamsten ist, aber mit der gekauften Fräse arbeitet er mehr als akzeptabel. Als langsam kann ich den nicht bezeichnen. Meiner Meinung nach sind die Achsen eher etwas zu flott, wenn sich vom Programm aus mit voller Geschwindigkeit fahren. Das ist aber nen anderes Thema. Nur schon mal im vorraus, den Motor den ich genannt habe wurde in der älteren Version dieser Fräse verwendet. Im Link sind stärkere beschrieben. Von der Ausgangssituation, dass die Motoren bei dieser Fräse genutzt werden, bin ich ausgegangen und dafür sollte mein Treiber entworfen werden. Der in der Lage ist die Achsen zu bewegen. Oder ist mir hier schon wieder ein Fehler eingeschlichen?
Patrick N. schrieb: > Diesen Motor habe ich genommen, weil er in der High-Z S-1000 von > CNC-Step verbaut ist. (Eilganggeschwindigkeit max. ca. 12.000 mm/min) Sicher nicht diese Motoren. Die drehen gerade mal 100upm, mit 6mm Stiegung macht das 600 mm/min Vorschub, also 20 mal langsamer (wobei die Normalvariante auch nur mit 4000 mm/min angegeben wird, aber selbst dort reichen die Motoren nicht).
Ein Anruf in der Firma und ich fange langsam an zu verzweifeln. Der genannte Motor ist für die Z-Achse. X und Y sind andere Motoren... Dennoch kann ich diesen Motor dann für die Z-Achse nutzen. Falls ich nicht doch auf andere umsteige. Werde mich auf jeden Fall erstmal um die Steuerung kümmern, denn das reizt mich schon eine eigene zu bauen. Danke bis hier hin erst einmal und Entschuldigung für die Umstände.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.