Servus, Ich wollte mal fragen mit welcher Hardware man aus einen Dc Motor ein Servo machen kann? Wenn ich die modellbauservos anschaue ist da j nix besonderes verbaut meist ein Poti ein Chip und nen bisschen Elektronik, was ist das eig für ein Chip der dort verbaut wird? Und was genau macht er?
Der Chip wandelt das Steuersignal in einen Sollwert um, wenn nötig, und vergleicht mit dem Istwert. Wenn die sich zu stark unterscheiden, regelt er die Position nach. Das Potentiometer dient zur Istwererfassung. Es gibt auch Schaltpläne zum Servoregler. Vielleicht finde ich einen davon wieder.
MasterX schrieb: > Ich wollte mal fragen mit welcher Hardware man aus einen Dc Motor ein > Servo machen kann? Mit der Hardware die ungefähr das doppelte von einem ganz neuen Servo kostet.
Marc V. schrieb: > Mit der Hardware die ungefähr das doppelte von einem ganz neuen Servo > kostet. Wenn das reicht, denn da ist ja noch ein Getriebe, hatte ich auch vergessen...
MasterX schrieb: > was ist das eig für > ein Chip der dort verbaut wird? In den 80ern oft ein Ne544.
Der Klassiker von ELM Chan. http://www.elm-chan.org/works/smc/report_e.html Das Ganze geht natürlich auch rein analog, wurde ja jahrzehntlelangs so gemacht. Heute sind digitale Lösungen meist besser und preiswerter.
Angehängte Dateien:
-

M51660_2.png
14 KB
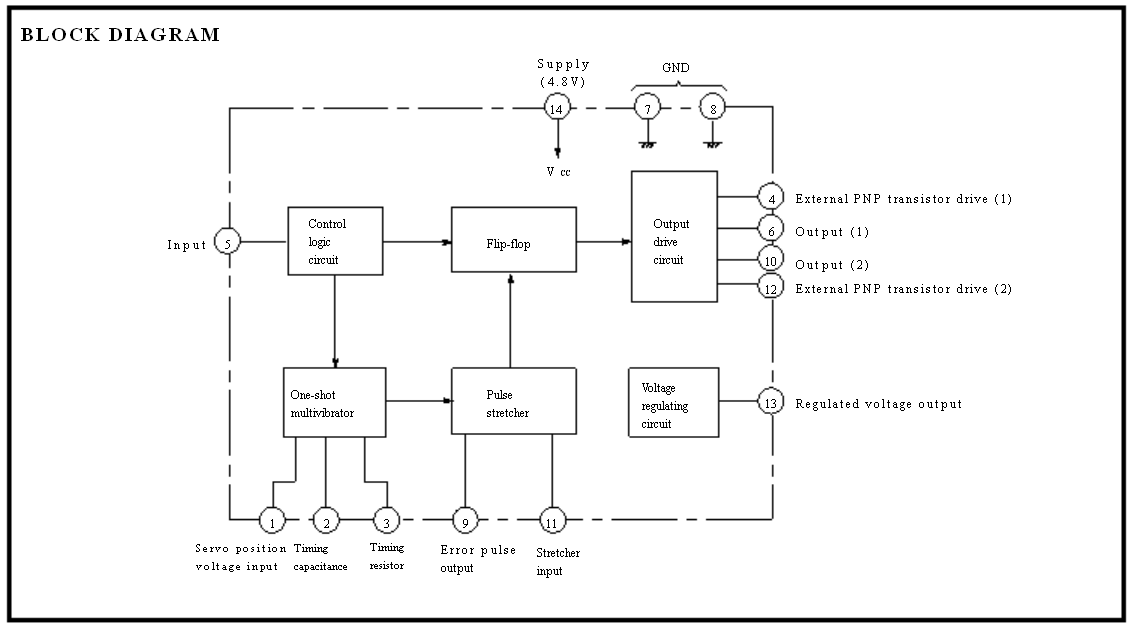
Richard H. schrieb: > In den 80ern oft ein Ne544. In den 90ern kam dann der M51660 dazu. Das Blockschaltbild gibt einen Überblick über die Funktion.
MasterX schrieb: > Ich wollte mal fragen mit welcher Hardware man aus einen Dc Motor ein > Servo machen kann? Ein Servo ist nix weiter als ein kleiner DC-Motor mit einem angeflanschten Getriebe mit mächtig viel Untersetzung. Außerdem ein Positionssensor, meist in Form eines Potis. > Wenn ich die modellbauservos anschaue ist da j nix besonderes verbaut > meist ein Poti ein Chip und nen bisschen Elektronik, was ist das eig für > ein Chip der dort verbaut wird? Und was genau macht er? Heutzutage gibt es fertige Servocontroller IC. Man kann das aber auch zu Fuß aufbauen, z.B. mit einem 555 und ein paar Logik-IC. Die Grundidee ist, das Poti als Widerstand in einem Monoflop zu verwenden. Immer wenn ein Steuerimpuls für das Servo kommt, wird das Monoflog getriggert und dann wird geschaut, welcher Impuls länger ist. Je nachdem ob der Steuerimpuls kürzer oder länger als der Monoflop-Impuls ist, wird das Servo in die eine oder andere Richtung gedreht und damit die Länge des Monoflop-Impulses an die Länge des Steuer-Impulses angepaßt.
MasterX schrieb: > Und was genau macht er? Position vergleichen und Motor ansteuern. Fernsteuerservo: alt: SN76604/SN28654=B654, ZN409, NE544, neuer: NJR2611, M51660, M52461, M64611, AA51880 Wer einen Servo bauen will (Poti regelt Gleichstrommotor auf Position die ebenfalls per Poti erfasst wird): TLE4206 und TDA3629 geht bis 0.8A, MC33030 bis 1A, DRV590/591/593/594 regeln Motoren bis 3A durch PWM. LM629 = Servo mit Beschleunigungsrampen, Inkrementaldecoder für Permanentmagnetmotoren, aber externer DAC + LeistungsOpAmp. aus http://www.dse-faq.elektronik-kompendium.de/dse-faq.htm
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.