Hallo, zurzeit implementiere ich einen digitalen PID-Regler mit Störgrößenaufschaltung. Der reine PID-Regler funktioniert gut. Unsicher bin ich bei der Ausführung der Störgrößenaufschaltung. Diese will ich anhand des folgenden Blockschaltbildes erstellen. https://upload.wikimedia.org/wikipedia/commons/4/42/Blockschaltbild_mit_st%C3%B6rgr%C3%B6%C3%9Fenaufschaltung.gif Aktuell passiert im Regler folgendes: - Die Störgröße wird gemessen - Eine analytische Funktion gibt die zur Höhe der Störgröße passende Stellgröße aus (Funktion wurde aus gemessenem "Kennfeld" angenähert). - Diese Stellgröße aus der Störgrößenaufschaltung addiere ich zu der Stellgröße, die der PID-Regler ermittelt - Der PID-Regler regelt so die Abweichung aus. Beispiel für einen stationären Zustand: - Stellgröße aus Störgrößenaufschaltung = 10 - Stellgröße aus PID-Regler = -2 --> Stellgröße = 8 --> ausgeregelter Zustand Das ganze funktioniert zwar, jedoch verstehe ich den theoretischen Hintergrund nicht ganz und bin mir aus diesem Grund nicht sicher, ob dies die optimale Lösung im Hinblick auf das dynamische Verhalten des Systems ist. Bspw. steht im Blockschaltbild ein Minuszeichen an der Stellgröße der Störgrößenaufschaltung. Das funktioniert aber in meinem Fall nicht. Ich muss dazu sagen, dass ich ein Neuling in der Regelungstechnik bin. Vielen Dank für eure Hilfe und viele Grüße!
Sagt ja niemand, dass dein G_D2(s) eine positive Größe ausgeben muss. Wenn D2(s) negativ ist wird aus dem Minus im Schaltbild ja wieder ein Plus.
Danke für deine Antwort. Das stimmt natürlich. Also ist die Implementierung der Stellgrößenaufschaltung grundsätzlich korrekt? Ich habe leider nirgends Codezeilen zum dem Thema bei meiner Recherche gefunden. Ist es also in der Theorie richtig, dass falls die Störgrößenaufschaltung eine "ideale" Stellgröße ausgibt, der aus dem PID-Regler hervorgehende Anteil der Stellgröße im stationären Zustand zu null wird? Hat die Störgrößenaufschaltung Einfluss auf die Regelparameter bzw. auf die Stabilität des Systems? Viele Grüße!
Hallo, kann mir jemand sagen, ob folgende Implementierung des PID-Reglers mit Störgrößenaufschaltung korrekt ist? x: Ist-Wert w: Sollwert z: Störgröße e: aktueller Fehler e1: Fehler des vorherigen Zeitschritts u: Stellgröße u_pid: Anteil der Stellgröße des PID-Reglers u_stoer: Anteil der Stellgröße der Störgrößenaufschaltung esum: Fehlersumme K_P, K_I, K_D: PID-Parameter dt: Zeitintervall // Pseudocode u_stoer = kennfeld(z); e1 = e; e = w-x; esum = esum+e; u_pid = K_P*e + K_I*esum*dt + K_D*(e-e1)/dt u = u_pid+u_stoer;
Angehängte Dateien:
-

books_002_korrektur.png
200 KB
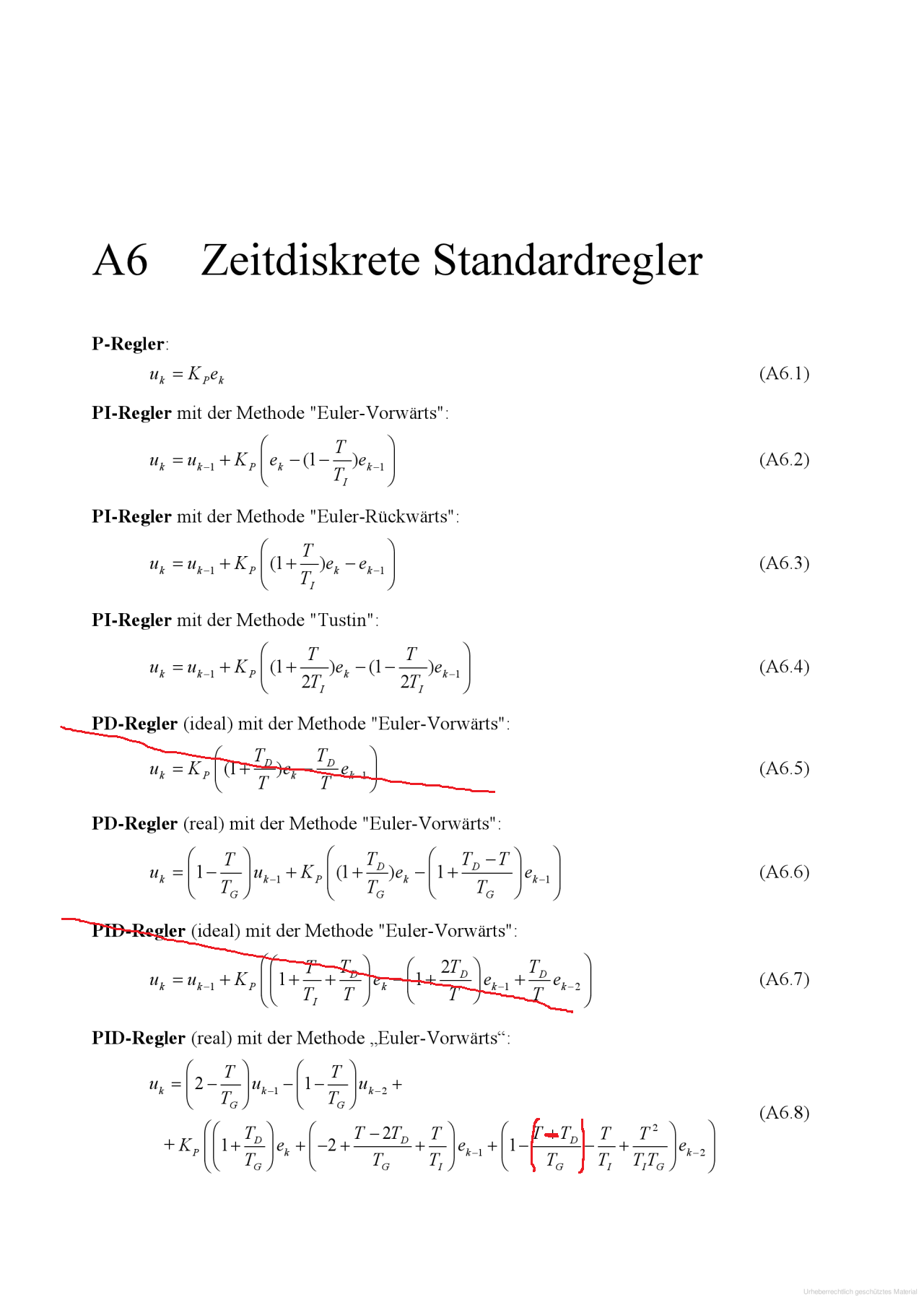
Wiesel schrieb: > Ist es also in der Theorie richtig, dass falls die > Störgrößenaufschaltung eine "ideale" Stellgröße ausgibt, der aus dem > PID-Regler hervorgehende Anteil der Stellgröße im stationären Zustand zu > null wird? Ja. Kannst es ja mal simulieren. Wiesel schrieb: > Hat die Störgrößenaufschaltung Einfluss auf die Regelparameter bzw. auf > die Stabilität des Systems? Nein. Hier ohne Beweis. Wiesel schrieb: > kann mir jemand sagen, ob folgende Implementierung des PID-Reglers mit > Störgrößenaufschaltung korrekt ist? hier anbei ein paar Regler mit Euler Vorwärts mit Korrektur. Vergesse den realen PID Regler. Dein System wird durch den D Anteil schwingen! Es gibt Faustregeln wie man die Verzögerungszeitkonstante anhand von KD einstellen sollte (Aström). Ich meine das war so T1 = (1/10..1/20)KD.
Angehängte Dateien:
-

messschrieb.png
69 KB
{kind=link}
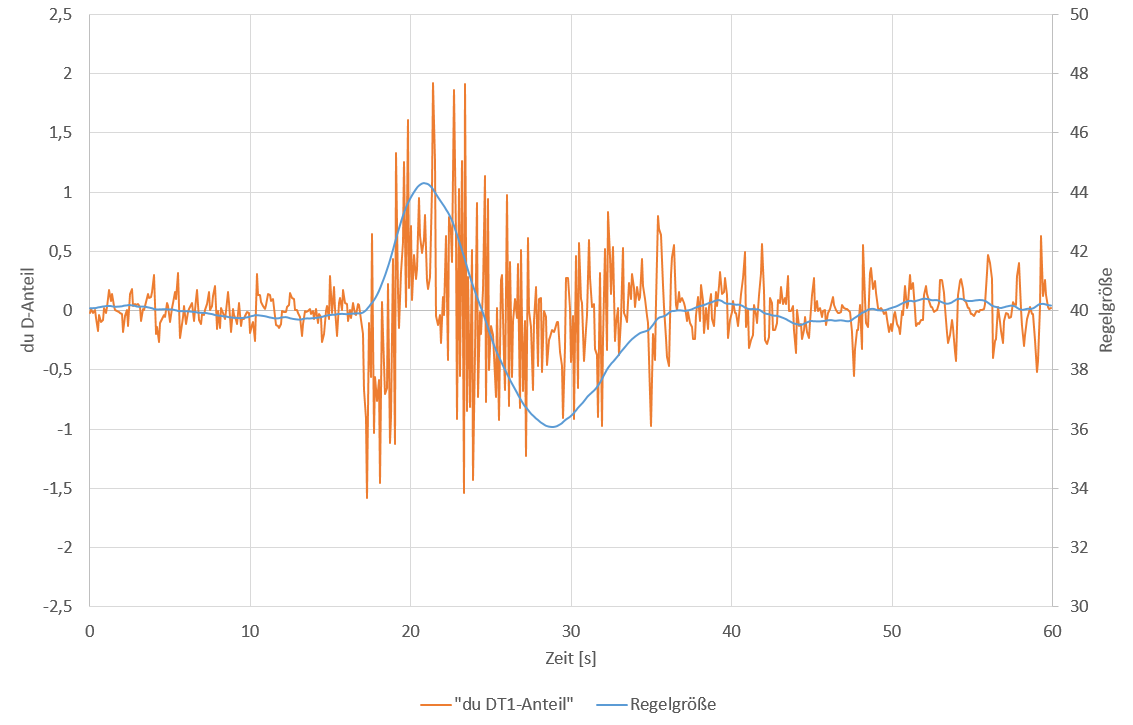
Vielen Dank! Das hat mir sehr geholfen. Ich habe in der Tat Probleme mit hohem Messrauschen, wodurch auch der D-Anteil sehr zittrig ist. Durch Verwendung eines DT1- anstelle des D-Glieds, wie von dir vorgeschlagen, wird das Regelverhalten besser. Wenn ich die Änderung des D-Anteils aufzeichne, ist das zittrige Verhalten deutlich zu sehen (siehe Diagramm). Sollte ich das Signal stärker filtern? Welche Filter sind in diesem Fall zu empfehlen? Die PID-Parameter habe ich mit dem T-Summenverfahren ermittelt. Durch Einsatz des DT1-Glieds habe ich allerdings festgestellt, dass ein deutlich größeres Kd in Verbindung mit einer Erhöhung von Ki ein besseres Regelverhalten liefert. Welches Verfahren zur Parameter-Ermittlung ist hier zu empfehlen? Das Aström-Buch kannte ich tatsächlich noch nicht. Ein super Tipp! Danke!
Wiesel schrieb: > Das Aström-Buch kannte ich tatsächlich noch nicht. Ein super Tipp! > Danke! Jetzt kommt die Weisheit des Tages: ohne Aström geht gar nichts! > Sollte ich das Signal stärker filtern? Welche Filter sind in diesem Fall > zu empfehlen? Habe ich dir doch da oben geschrieben. Aber so genau weiß ich nicht mehr. Also probiere aus oder schlage nach. -D Anteil schwingt. Suche nach Faustformeln, damit du T1 anpassen kannst. > Welches Verfahren zur Parameter-Ermittlung ist hier zu empfehlen? -Heuristische Optimierungsverfahren -WOK -Zeitkonstanten kürzen, zu Fuß halt. mfg
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.