Problemstellung: (für interessierte) Frage siehe unten!
------------------------------------------------------------
Ich möchte in der Lage sein, ein sechs-rädriges Fahrzeug mit:
M_max: 200 kg
Steigungen von:
S_max: 25 % (~14 °)
bewältigen zu lassen.
Dabei sei ein Allradantrieb (realisiert durch Motoren an jedem Rad)
vorausgesetzt. Möglicher Traktionsverlust ist zu vernachlässigen.
Ohne Anlauf komme ich (einige Vereinfachungen angenommen) bei gegebenen
Radparametern (330 mm Durchmesser außen, Felge hat 140 mm
Innendurchmesser am Rand, 100 mm in der Mitte) auf:
D_min: 5,25 Nm
pro Motor.
Ich habe Drehstromasynchronmotoren als Antrieb in Erwägung gezogen. (Das
sei nicht zu hinterfragen ;) Wir betrachten hier eine
Machbarkeitsstudie)
Nach reichlichem Einlesen ist mir nun klar wie diese Motoren prinzipiell
funktionieren, jedoch habe ich ein Dimensionierungsproblem wobei mir
vielleicht jemand helfen kann der in dem Bereich praktische Erfahrung
hat:
Der Motor muss günstig sein (warum sag ich das eigentlich?), klein sein
(er soll so gut es geht in die Radnarbe passen), das nötige Drehmoment
aufbringen können (natürlich!)
Das Fahrzeug muss nicht schnell fahren können:
V_max_perfekt: 25 km/h (~400 U/min)
wären ein Traum.
V_max_ausreichend: 10 km/h (~160 U/min)
jedoch sehr wünschenswert.
Da ich das Ganze sowieso mit einem Frequenzumrichter betreiben muss/will
(damit es nicht nur Vollgas gibt) und der Strom (und damit auch das
Drehmoment?) bei geringeren Frequenzen zunimmt, stellt sich mir folgende
Frage:
Frage:
------------------------
Worin besteht der grundsätzliche Vorteil einen z.B 12 oder 16 Pol Motor
zu nehmen, der bei 50Hz mit 500 bzw. 375 U/min dreht, anstatt einen
günstigeren und leichter zu beschaffenden 3000/1500/1000 U/min Motor zu
nehmen und die Betriebsfrequenz entsprechend hinabzusetzen.
Wow da haste ja lange ausgeholt.
Die hochpoligen Motore bringen einfach mehr Moment also deine
Wunschleistung bei kleinen Drehzahlen.
Such doch mal zwei Datenblätter raus.
Schau dir den Strom bei beiden Motoren und die Baugrößen an.
Raccoon schrieb:> Dabei sei ein Allradantrieb (realisiert durch Motoren an jedem Rad)> vorausgesetzt. Möglicher Traktionsverlust ist zu vernachlässigen.
Ein bewährtes Prinzip für 6-Rad Antrieb sind Radnaben (Getriebe-)
DC-Bürstenmotoren mit z.B. 12V, die pro Achse in Reihe geschaltet weden
und dann mit 24V angetrieben werden. Das wirkt wie ein automatisches
Differential und hat so gut wie keine Traktionsverluste. Wir haben so
ein Fehrzeug in der Firma und verleihen es öfter an Filmleute, weil es
selbst auf Golfplätzen und ähnlich anspruchsvollen Oberflächen keine
Spuren hinterlässt.
Ein weiterer Vorteil ist der komplette Wegfall einer Lenkwinkel
Erfassung und -berechnung. Das Ding wird mit einem 600A Curtis DC
Controller befeuert und ist eigentlich für Gepäcktransporte auf dem
Rollfeld von Flughäfen gedacht.
Deine Drehmomentermittlung finde ich interessant.
Das nächste ist nur eine überschlägige Betrachtung. Wer mag, darf es
gerne genauer rechnen.
200 kg führen zu 2000 N Gewicht. Bei 25% Gefälle hat man so schon eine
Hangabtriebskraft von ca. 500 N, 83 je Rad. Mit Schubkarrenreifen kann
man die schon mal nicht zur Erde bringen.
Mit r=0,165 m komme ich da auf knapp 14 Nm an jedem Rad.
Die erforderliche Leistung für 10 km/h an 25 % Steigung mit 200 kg liegt
bei etwa 1,5 kW (2 PS). Die reicht aber nicht zum Anfahren.
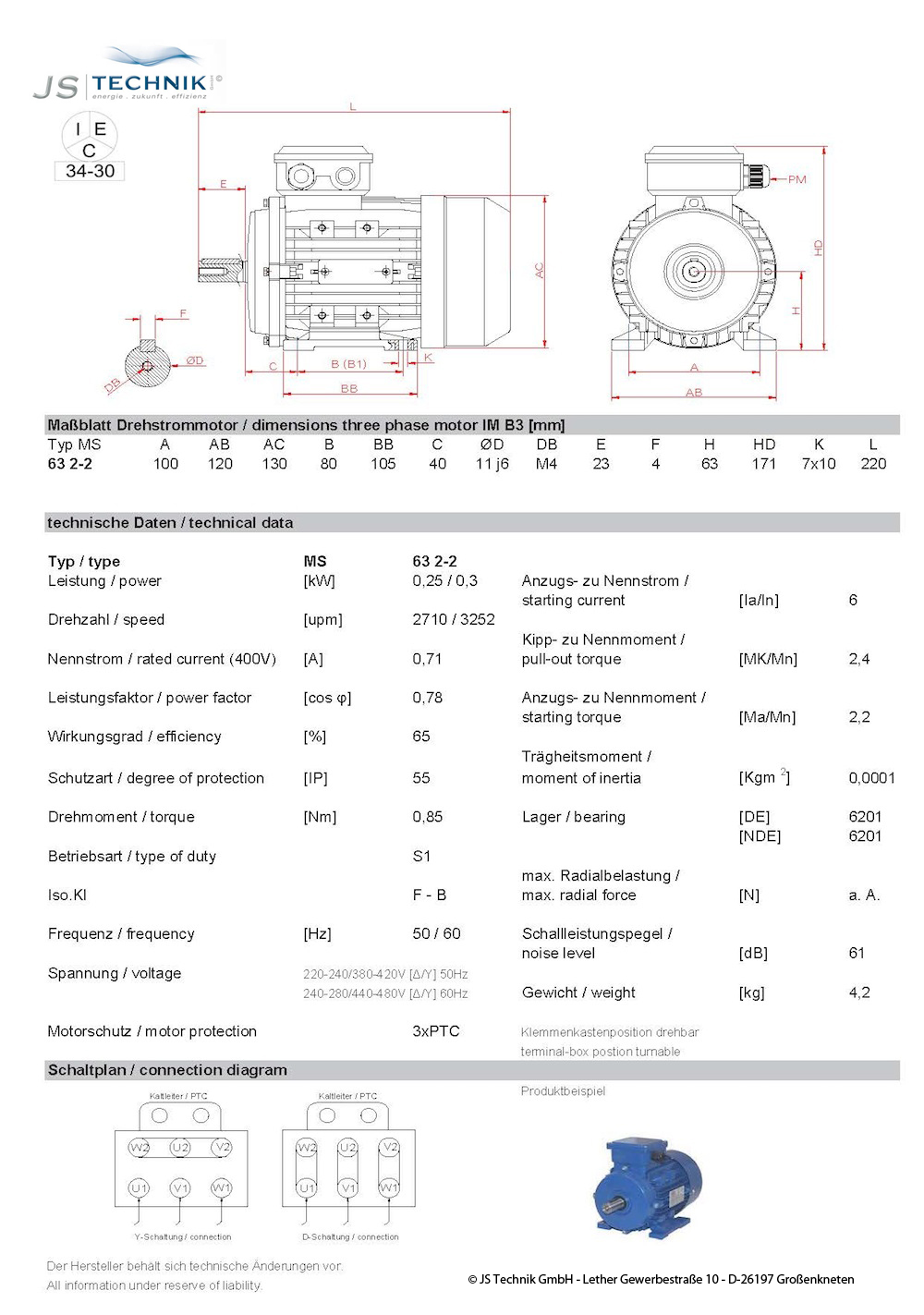
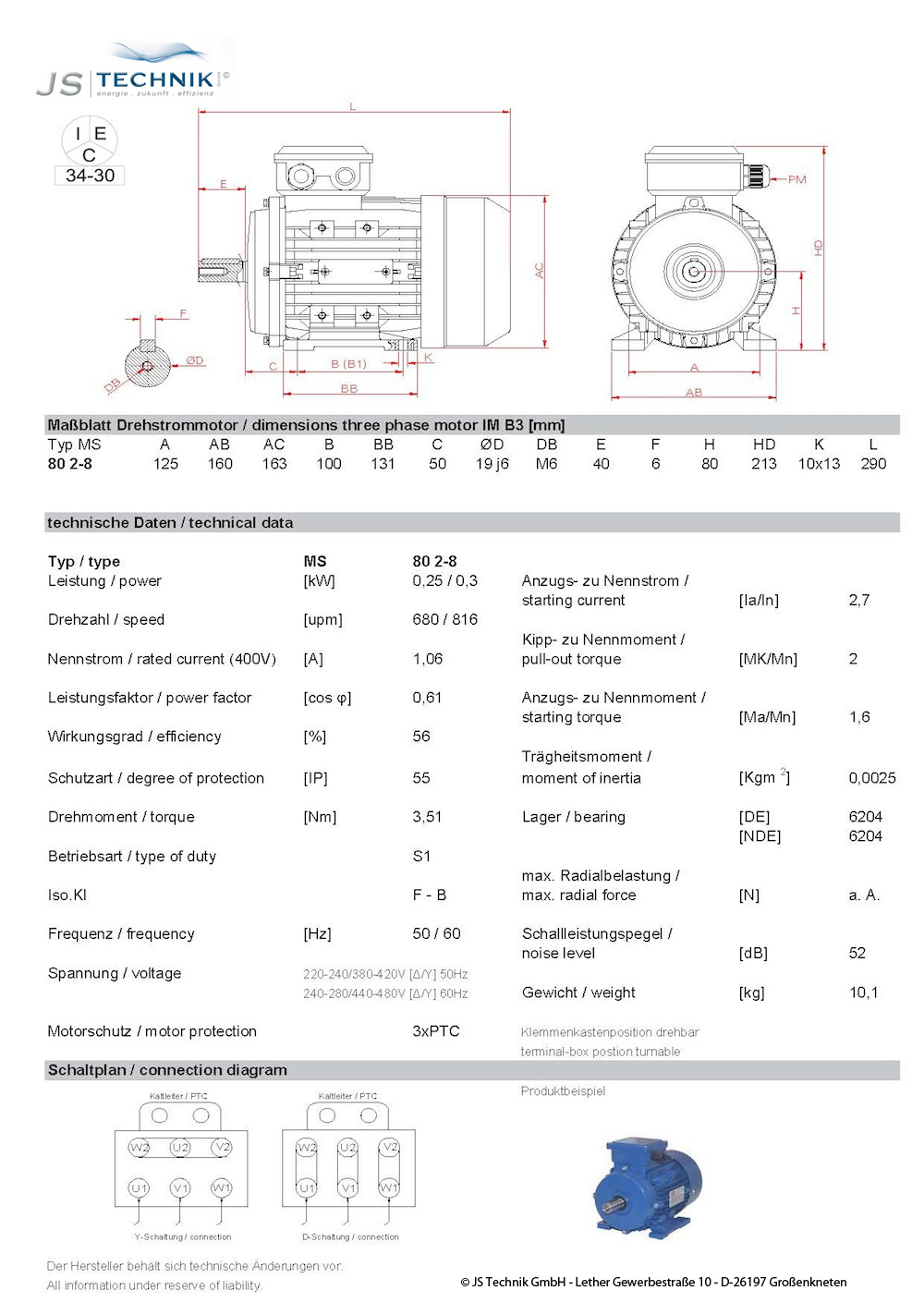
Okay, ich habe mal zwei Datenblätter rausgesucht und du hast mich da
wirklich auf was interessantes gebracht.
Beide Motoren sind weitestgehend identisch, was auffällt:
der 3000 U/min Motor ist:
-günstiger
-kleiner
-effizienter (Wirkungsgrad)
-und mit Untersetzung, bei gleicher Drehzahl, kräftiger als der langsame
aber für eine Untersetzung habe ich keinen Platz und Planetengetriebe
sind so teuer schluchz
was ich bis jetzt in keinem Datenblatt gefunden habe ist ein oder
mehrere Graphen, die mir mal erklären wie sich der Motor verhält, wenn
man seine Nenndrehzahl verlässt.
wahrscheinlich ist der schnellere Motor bei der von mir gewünschten
Drehzahl nicht mehr effizienter als der Langsame? Ich lese nur überall,
dass mit einem Frequenzumrichter auch sehr große Losbrechmomente
überwunden werden können ohne den Motor größer dimensionieren zu müssen.
Doch woran liegt das? An der niedrigeren Frequenz?
Du darfst nicht mit 25% Steigung rechnen. Du hast aber recht, ich habe
mich kolossal verrechnet. Der Rechner Stand auf Radian ... das ist
peinlich
Also nochmal neu:
die Hangabtriebskraft berechnet sich zu sin(14,04)*200kg*9,81N/kg =
~476N
476N / 6 = 79 N pro Rad macht bei 33cm Durchmesser:
13Nm Pro Motor... das ist jetzt aber ganz schön viel :o vielleicht
sollte ich meine Ansprüche etwas senken
Ich seh erst jetzt, dass du ja auf ähnliche Ergebnisse kommst wie ich
und nur überschlagen hast. Natürlich darfst du dann mit 25% Gefälle
rechnen =)
Die Höchstgeschwindigkeit erwarte ich selbstverständlich nicht am Hang.
Hier ging es mir lediglich um die minimale Nenndrehzahl des Motors...
Raccoon schrieb:> 476N / 6 = 79 N pro Rad macht bei 33cm Durchmesser:>> 13Nm Pro Motor... das ist jetzt aber ganz schön viel :o vielleicht> sollte ich meine Ansprüche etwas senken
M=F*r
wären es dann nicht M= 79N*0,33m= 26Nm?
Raccoon schrieb:> der 3000 U/min Motor ist:> -günstiger> -kleiner> -effizienter (Wirkungsgrad)> -und mit Untersetzung, bei gleicher Drehzahl, kräftiger als der langsame
Ne der eine Motor liefert 0,8Nm der andere Liefert 3,5Nm.
Oben rechnest du aus das du ein Moment von 5Nm benötigst.
Also musst du auch 2 x Motore finden die 5Nm liefern. 1 x Motor bis z.B.
3000U/min und der andere Motor bis z.B 750u/min.. dann wird der
unterschied klar.
KOhlee schrieb:> Raccoon schrieb:>> 476N / 6 = 79 N pro Rad macht bei 33cm Durchmesser:>>>> 13Nm Pro Motor... das ist jetzt aber ganz schön viel :o vielleicht>> sollte ich meine Ansprüche etwas senken>> M=F*r>> wären es dann nicht M= 79N*0,33m= 26Nm?
ok durchmesser nicht radius...
Matthias S. schrieb:> Ein bewährtes Prinzip für 6-Rad Antrieb sind Radnaben (Getriebe-)> DC-Bürstenmotoren mit z.B. 12V, die pro Achse in Reihe geschaltet weden> und dann mit 24V angetrieben werden. Das wirkt wie ein automatisches> Differential und hat so gut wie keine Traktionsverluste.
Danke für den Tipp mit dem "virtuellen" Differential!
Ich wollte eigentlich nichts Bürsten, aber mit dem Gedanken
Fahrrad-Radnaben-Motoren zu nehmen habe ich auch schon gespielt :/ Aus
Projektsicht fände ich es einfach unheimlich interessant mich mal mit
den Asynchronmotoren auseinander zu setzen. Mit allem Drum und Dran.
Space-Vektor-Control, Phasenanschnitt, Lageerkennung etc. pp.
Außerdem waren die Nabenmotoren (zumindest was ich so in der Bucht
gefunden habe) immer mit ziemlich hohen Kosten verbunden. Asynchros
haben halt schon ein ziemlich gutes P/L-Verhältnis ...
Inkognito schrieb:> Benutze doch mal die Suche. Das hatten wir schon mal vor einem Jahr> oder so.
Ich habe die Suche tatsächlich bemüht, habe aber wohl nach dem Falschen
gesucht, hast du zufällig einen Link für mich? =)
KOhlee schrieb:> Also musst du auch 2 x Motore finden die 5Nm liefern.
Oh Alles klar, natürlich, das ist der logischere Ansatz, ich dachte ich
nehme erstmal die Leistung als gemeinsamen Nenner.
Hochpolige Asyncronmotoren bauen bei gleicher leistung wesentlich größer
als 2 oder 4 polige Motoren, der Wirkungsgrad ist auch schlechter.
Wenn hochpolig, besser syncron.
Torsten W. schrieb:> Hochpolige Asyncronmotoren bauen bei gleicher leistung wesentlich größer> als 2 oder 4 polige Motoren, der Wirkungsgrad ist auch schlechter.> Wenn hochpolig, besser syncron.
bei 5Nm dürfte es egal sein ;-)