Hallo Zusammen, ich bau momentan an einem "microcontrollergesteuertem Flugobjekt". Zur Neigungsbestimmung habe ich vor 4 Beschleunigungssensoren in einer "Art Vollbrückenschaltung" zu verwenden. Leider sind diese hierzulande aber ziemlich teurer (Conrad a´ 50€ ). Laut UVP des Herstellers Analogdevices kostet ein ADXL202 nur 8,50 $, nur kann man dort nicht ordern. Bei Digi-Key http://de.digikey.com/ gibt es den ADXL202 für 11,50€. Zudem kann man dort auch den ADXL322 für 5€ bestellen (plus shipping 18€ + Bearbeitungsgebühr 13€). Meine Frage ist nun, ob jemand von euch schon Erfahrung in diesem Gebiet hat und mir bei der Wahl weiterhelfen kann. Aus den Datenblättern(http://www.analog.com/en/prod/0%2C2877%2CADXL202%2C00.html) hab ich bisher rausbekommen, dass sich beim ADXL202 das Pulsweitenverhältniss über einen Condensator auch in Nulllage variieren lässt, bei 322'er nicht. Vielleicht kennt ja jemand auch günstigere Alternativen. Ich bin für jede Antwort dankbar. MfG Michi
Als Flugobjektekonstrukteur solltest du wissen, dass auf die Sensoren beim Kurvenflug keine seitlichen Beschleunigungen einwirken, und damit dein "microcontrollergesteuertes Flugobjekt" zu einem microcontrollergesteuerten Absturzobjekt werden wird. Zumindest in einem "echten" Flugzeug ist das so. MfG
www.sander-electronic.de hat einige ADXL-Typen, ab 12,06 für den ADXL320JCP laut Anziehge im "Funkamateur"
@Christoph Vielen Dank. Hier sind die Sensoren schon mal billiger als bei Conrad. Guter Tip @Dennis Meine Beschreibung ist vielleicht etwas dürftig geraten. Jetzt mal etwas ausführlicher: Der Beschleunigungssensor funktioniert mittels winzigen Nanomassen, die über einen Piezosensor im IC "aufgehängt" sind. Wie du ja bestimmt weißt ist F=m*a; a=g -> g=F/m . Darüber misst der Sensor die Erdgravitation, d.h. umsomehr der Sensor zur Gravitationswirkung gekippt wird, desto höher die Kraft.....höhere Ausgansspannung. Meine Frage war im ersten Moment, na dann hab ich doch nur kurzzeitig ein Ausgangssignal. Das Signal des Piezo´s wird aber über über Operationsverstärker verstärkt und bei const. g auch konstant auf einen Wert, bzw. auf einem const. Puls-Pausenverhältniss gehalten. Ich hatte geplant 4 ADXL´s in Sternform anzubringen. Dadurch kann exakt die Neigung bestimmen(so denke ich mir), denn selbst, wenn ich aufgrund einer "Kurve" Beschleunigung in einer Richtung habe, dann wirkt diese Beschleunigung auf alle 4 X-g-Sensoren. Wenn ich jedoch eine Schräglage habe ist z.B. im Extremfall 90° gegenüber Erdachse Sensor-X-1 = 0,5*Umax Sensor-X-2 = -0,5*Umax. Die 0,5 daher, weil der Sensor den Bereich -2g....+2g hat. Was ich mich zudem gefragt habe, ob die Toleranz von 1g ausreicht, um trotz Flugbeschleunigung noch immer die Neigung zu bestimmen. Das ist halt dann eine Frage, wie schnell ich von 0 auf X Kmh beschleunige. Vielleicht könnte man noch ein paar zusätzliche Sensoren mit höheren Grenzbereichen einsetzen. Der Nachteil ist halt, dass die Genauigkeit prozentual auf den Messbereichsendwert bei allen Sensoren gleich ist. So. Ich hoffe das war jetzt nicht zu viel Text und bin gespannt auf eure Meinungen.
Das wird so nicht funktionieren. Deine Beschleunigung a ist nicht nur gleich g, sondern gleich vektor g + vektor sämtlicher Beschleunigungen in den drei Freiheitsgraden. Wenn du ein linearisiertes Modell der Flugzeugbewegung haben willst leih dir mal das Buch "Flugregelung" von Brockhaus aus. Da steht alles drin. Gruß
@Mech Michi Kennst Du ev. einen Grossflieger-Piloten in Deiner Naehe? Wenn ja, bitte ihn ob er Dich mal mitnimmt. Im Cockpit gibt es da so ein Instrument, dass wie eine umgedrehte Wasserwaage aussieht, nur dass statt der Luftblase eine Kugel drin schwimmt (aeh: taucht). Das ist Dein 'Beschleunigungssensor', nur halt in Analog. Und den beobachtest Du mal waehrend Dein Pilot saubere Kurven fliegt. Die Kugel bleibt voellig ungeruehrt sauber in der Mitte stehen, selbst wenn der Pilot eine Steilkurve fliegt. Das Wesen einer sauberen Kurve besteht darin, dass die Vektoraddition aus Gravitation und Flieh- kraft eine Resultierende ergibt, die exakt senkrecht auf den Rumpfboden steht. Oder anders ausgedrueckt: Wenn Dein Pilot eine saubere Kurve fliegt (die Neigung passt zum Kurvenradius), dann kannst Du das mit einem Pendel nicht feststellen, das bleibgt immer in der Mitte stehen und macht keinen Mucks.
@Mech Michi Schau dir doch mal den MMA7260Q von Freescale an. Den soll es unter 10 Euro geben.
Angehängte Dateien:
-

Beschl.-Verteilung.GIF
11 KB
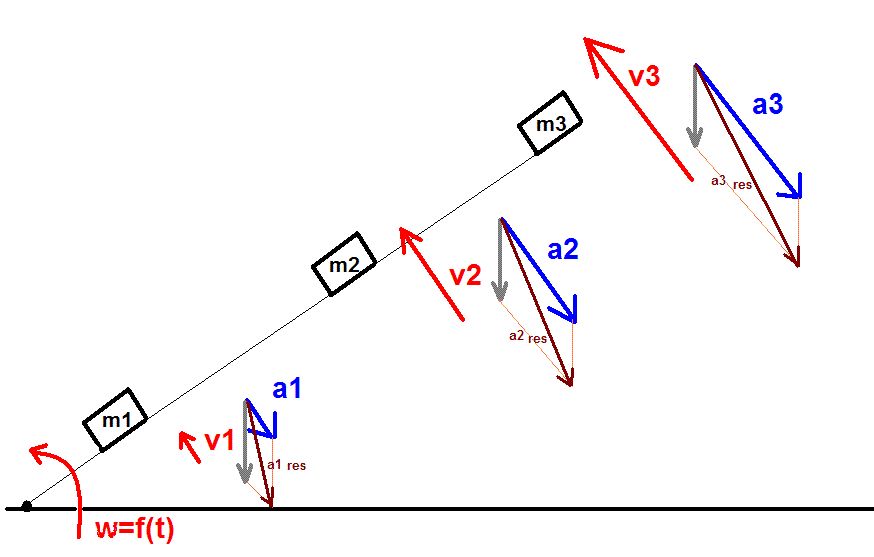
Ich hab mir jetzt noch mal eure Ratschläge zu Herzen genommen und eine Überlegung angestellt(Dazu bitte Anhang öffnen). Ich bitte um Entschuldigung für diese sehr schematische Zeichnung. Corioliskräfte habe ich mal vernachlässigt. Und zur einfacheren Überlegung nur 1D. Nun zur Erklärung: Ich bringe auf meinem "Flugobjekt" in verschieden Abschnitten vom Schwerpunkt Beschleunigungssensoren an(dies nenen ich mal B-Fläche). Nun nehme man den Fall an, dass sich die B-Fläche dreht. Rein formal ausgedrückt könnte man jetzt sagen die Kreisfrequenz(w) ändert sich als Funktion von t. Aus der Kreisfrequenz resultiert die Geschwindigkeitsänderung v=w*l. Daher ändert sich die Geschwindigkeit also auch als Funktion der Hebellänge. Beschleungigung ist die Änderung der Geschwindigkeit, also [v(t0)-v(t1)]/[t1-t0]. Da v1(t1) < v2(t1) ist, und v1(t0)=v2(t0) folgt, dass a1 < a2. Lange Rede kurzer Sinn, die Beschleunigung ist von der Lage zum Schwerpunkt, um den gedreht wird abhängig. Und nun komme ich wieder auf eure Vektorbetrachtung: Der Resultierende Vektor aus der Neigungsbeschleunigung und der Erdbeschleunigung ist ebenfalls eine Funktion vom Schwerpunkt. Daraus müsste sich über ein paar mathematische Kniffe doch auch eigentlich die Neigung bestimmen lassen können. Ich möchte nicht ausschließen, dass ich total auf dem Holzweg bin, schließlich ist technische Mechanik schon 1 Jahr her.
Hallo, ich fürchte du bist auf dem Holweg. Beschleunigungssensoren messen Beschleunigungen, also grob gesagt Bewegung. Was du brauchst sind Neigungssensoren. Schau mal bei diesm Link vorbei oder gib bei Google mal "Neigungssensor" ein. Es grüsst, Arno
@Conlost Vielen Dank für deine Antwort. Du hättest aber mein 2.Posting lesen sollen. Darin versuchte ich bereits zu erklären, dass die Beschleunigung eine Kraftwirkung hervorruft...piezoelektrischer Effekt...konstante Ausgangsspannung dank OPV´s bei const. g. Dein Neigungssensor basiert soweit ich das ersehen kann auf der kapazitiven Wirkung zweier Flächen zwischen denen ein Dielektrikum gefüllt ist(Epsilon r>1) und zudem eine Luftblase(Epsilon r =1). Aufgrund der Erdanziehung wird die Luftblase änlich wie bei der Wasserwage "verrutscht". Wodurch bei STEHENDEN OBJEKTEN die Neigung bestimmt werden kann. Die Driftbeschleunigung hat hierbei aber genauso einen Eifluss auf die Luftblase. D.h. wir stehen bei dem selben Problem wie zu Beginn. P.S.: Einmal Submit klicken reicht ;)
also ich denke, knapp daneben (..is auch vorbei...) was du zur lage-erkennung brauchst, ist ein gyro. + evtl beschl.sensoren dazu, falls zb fallen-steigen auch bestimmt werden soll.
wie wärs mit LIS3L02DQ hab ich grad bei www.sander-electronic.de für 19Euro gesehen @Christoph Kessler guter link
@alfsch könntest du mal kurz erklären warum du meinst, dass ich daneben liege? THX @Jochen 19€ klingt gut, bei Digi-Key kommt man aber bei einer höheren Menge günstiger hin.
achja zu dem Problem Lageregelung da gabs hier im forum doch schon mal nen Thread, dabei ging es allerdings um ein uboot. Find ihn leider nicht mehr schau mal hier http://autopilot.sourceforge.net/systems.html
@Jochen für meine Anwendung würde ich mehrere Beschl.-Sensoren benötigen. Da hat es für mich, momentan wenigstens, noch keinen Vorteil, wenn eine Z-Achsen-Messung dabei ist
Ich werde jetzt mal in die Tasche greifen und mir ein paar ADXL202 besorgen und experementieren. Ich hoffe in ein paar Wochen kann ich mich mit positiven Nachtrichten melden. Nochmal THX@all
Also so wie ich deine Zeichnung verstehe, kannst du damit nur Winkelbeschleunigungen messen - Der absolute Winkel und die Winkelgeschwindigkeit bleiben dir verborgen, und ohne dass der Pilot (in dem Fall der Controller) diese Werte nicht kennt, kann kein Flugzeug vernünftig fliegen. Was du brauchst, ist ein künstlicher Horizont (Kreiselinstrument) mit elektrischem Ausgang. Nur mit Beschleunigungssensoren wirst du das nicht hinbekommen, genausowenig wie man ein Flugzeug mit geschlossenen Augen fliegen kann. MfG
Eventuell geht das doch, Eine Masse wirkt immer mit einer Kraft in Richtung Schwerkraft über die Vektoren des Beschleunigungssensors sollte sich die Erdbeschleunigung in Richtung und Stärke ermitteln lassen. sind alle Beschleunigungskräfte gleich null, so befindet sich das Objekt im freien fall. Die Frage ist nur wie kann ich die Erdbeschleunigung von der Gesamtbeschleunigung isolieren. Dies ginge beispielsweise durch setzen vor dem Start und Fortlaufendes integrieren der Messwerte. Mir ist klar das dieszu erheblichen Datenmengen führt. Somit wären Korrekturen unumgäglich z.B. nach Durchfliegen eines vollständigen Kreises in einer Achse. Auch wäre es nützlich neben der Neigung steets die Altidute und den Kurs zu kennen. Und das wird schon schwierig. Bei den geringen Flughöhen eines Models werden Druckänderungen vielzu Stark von allen möglichen Störungen überlagert. Das bringt mich zu der Frage wie schnell bewegt sich dein model und mit welchen bechleunigungen ist zu rechnen. Ein Luftschsiff oder Tragschrauber dürfte unter ganz anderen Bedingungen und träger regulierbar sein als eine Rakete oder ein Flugzeug. Dies könnte auch ausschlaggebend für die Wahl der richtigen Sensortechnik sein. Letztedlich gebe ich zu bedenken , das eine Kombination von drei oder gar vier oder 6-8 Dreiachsenbeschleunigungsensoren die das Problem beheben könnte. Wichtig ist, möglich währe so Kompensationsberechnungen anzustellen. (Analog mittels OPV ist im übrigen schneller) Digital ist nur für die Kommunikation und Steuerung der Stellglieder sinnvol. Kreisel und Künstlicher Horizont wären indem Fall zu den Analogtechnologien zu zählen.
was du brauchst ist ein Kreiselkompass bzw Gyroskop, die sich glaube ich auch in guten Modellflughubschraubern befinden. Der wichtige Satz ist der: "Es besitzt als Hauptbauteil einen beweglich gelagerten Kreisel, mit Hilfe dessen es aufgrund der Drehimpulserhaltung seine Ausrichtung im Raum beibehält, auch wenn die Aufhängung gedreht wird." Das kann dein Beschleunigungssensor nicht. http://de.wikipedia.org/wiki/Gyroskop die gibts auch als digitale ICs, gab schon mal einen Beitrag dazu. http://www.mikrocontroller.net/forum/read-1-203955.html#new
Auch mit einem einfachen Gyroskop funktioniert es noch nicht. Grund: Man hat dann zwar neben der Winkelbeschleunigung noch die Winkelgeschwindigkeit, wenn man aber versucht, daraus durch integrieren den absoluten Winkel zu ermitteln, wird dieser mit der Zeit durch Toleranzen wegdriften. Gedacht sind die Dinger nur zur Dämpfung von Drehbewegungen. Bei "echten" Instrumenten sind dort, wo unten sein sollte, noch Gewichte angebracht, die das wegdriften verhindern. Wenn man 3 Stück davon hat kann man das Modell mit etwas Glück um alle 3 Achsen stabil halten und dann so integrieren, dass der Wert mit der Zeit immer auf 0° zurückläuft, also das Gewicht elektrisch simulieren. MfG
Angehängte Dateien:
-

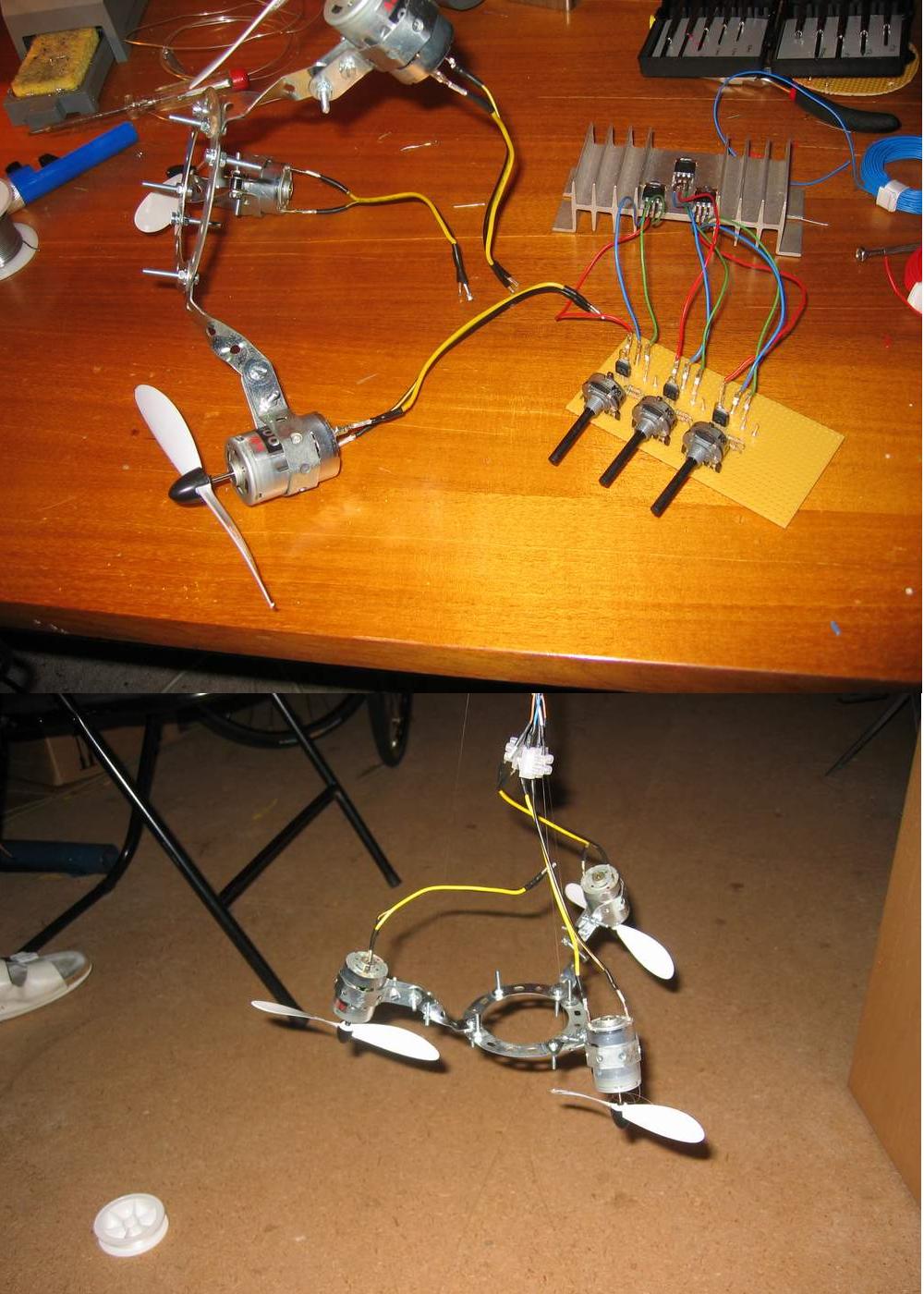
3D-Projekt.JPG
180 KB
{kind=link}
wie schon gesagt, ich werde alle Vermutungen in die Untersuchungen mit eingehen lassen, aber bis die Sensoren da sind und die Platine geätzt ist, dauerts leider ein bisschen. Mir ist auch klar, dass alleine die Beschleunigungssensoren nicht ausreichen. Das währe ja schließlich wie wenn man sagt, nur mittels Abstandssensor lässt sich ein Auto autonom steuern & ) Das Flugobjekt soll so ähnlich wie das X-Ufo werden, nur mit 3 Rotoren und einem Seitenrotor(dieser ist im Bild noch nicht mit eingebaut).
Mir fällt da gerade noch was ein: Ich hab mal irgendwo was von einem optischen Autopiloten gelesen, dabei wird mit 4 nach schräg unten gerichteten LDRs die Belichtungsstärke gemessen. Vorraussetzung dass das funktioniert ist allerdings, dass die Sonne in etwa über dem Modell steht. In diesem Fall kann man nämlich annehmen, dass die Beluchtungsstärke von weiter nach unten gerichteten LDRs kleiner ist. MfG
das microgyroscop scheint mir gar nicht unsinnig lustig nur Punkt 1(2)der Handling Notice Zitat Notice (Handling) 1. Incorrect handling may affect sensor characteristics. Please note the following precautions: (1) Do not subject the sensor to shock that exceeds the rated limit. (2) Do not wash the sensor. 2. Precision electronic parts, such as ICs, are used for the sensor; therefore, it is necessary to take anti-static measures when handling.
Da hab ich auch was dazu: wie schon manch anderer hier im Forum habe ich mich an einem elektr. Kompass versucht, und zwar mit drei zueinander stehdenden Sensoren, aus denen man den gesamt-Magnetfeldvektor errechnen kann (behaupte ich zumindest mal). Dieser Vektor zeigt nicht nur nach Norden, sondern auch noch in den Boden hinein, siehe Geomagnetismus. Wenn man die Lage diese Anordung ändert, ändert sich die Verteilung der drei Komponenten auf die drei Sensoren, der resultierende Vektor bleibt jedoch gleich. Wiederum behaupte ich, dass man daraus die Neigung berechnen kann. Das ganze ist völlig unabhängig von irgendwelchen Kräften. Bisher hat mir noch niemand bestätigen können, hiermit bitte ich Euch um anregende Diskussion... Siehe: http://www.mikrocontroller.net/forum/read-1-191006.html http://www.mikrocontroller.net/forum/read-1-68172.html http://www.mikrocontroller.net/forum/read-1-40234.html http://www.mikrocontroller.net/forum/read-1-6589.html http://www.mikrocontroller.net/forum/read-1-230866.html http://www.mikrocontroller.net/forum/read-1-222240.html
@ Profi Das klappt nur, wenn ich die Apparatur für den entsprechenden Breitengrad eiche. Das hängt damit zusammen, dass mit zunehmenden Breitengrad die magnetischen Feldlinien immer schräger werden.
Ich bin mir jetzt gerade nicht sicher, ob diese Schräge mit zunemender Höhe stärker wird. Wenn dem nicht so wäre, könnte man das Modell am Boden eichen. Das ganze könnte funktionieren, die Berechnung dürfte allerdings kompliziert werden. MfG
Nochmal @ Profi: Ich fürchte das funktioniert doch nicht. Man kann vielleicht 2 Winkel bestimmen, aber den 3. Winkel, die Rotation um die Achse, welche in Feldlinienrichtung liegt, kann man so nicht bestimmen, egal wie man rechnet. MfG
@Martin: ja, das mit dem Eichen weiß ich. Nur so kann ich die unterschiedliche Empfindlichkeit der Sensoren und die aktuelle Stärke des Magnetfeldes wissen. Am besten, einmal so in alle Richtungen drehen, dass jeder Sensor den Vektor voll in beiden Richtungen spürt. Idealerweise mache ich das nur ein einziges mal, und es gilt im Umkreis von mehreren (zig?) km. Eher muss man die aktuellen Störfelder weg-kalibrieren. @Dennis: hmmm, daran hatte ich noch nicht gedacht... Du hast recht, wenn ein Sensor alles abbekommt, bleibt für die anderen beiden nichts mehr übrig, egal wie man dreht. Bisher beschäftigte ich mich nur mit Kompass und nicht mit Lagebestimmung. Beim Kompass reicht die Info aus, denn dann ist Norden genau da, wo der betreffende Sensor hinzeigt. Im Flugbetrieb dürfte diese Situation eher nur selten und kurzzeitig vorkommen, aber dann weiß die Stabilisierung nicht, was sie machen soll. Ob man das per SW überbrücken kann? Hilft es, wenn man 4 Sensoren (2x KMZ52) nicht senkrecht zueinander anordnet, z.B. 45°? Dann kann es nie vorkommen, dass nur ein Sensor was "sieht". Ich denke / hoffe, die Berechnung ist nicht sooo schwer, ein paar arctan2(x,y) ... Habe noch wenig in dieser Richtung gemacht, eher HW. Noch was zur Höhe, die Richtung dürfte sich schon ändern, aber nur sehr wenig (Verhältnis Flughöhe zu Erddurchmesser...).
Ich hab nochmal ein bisschen weitergedacht. Bei der ersten Messung bekommt man einen Vektor raus, angenommen dieser sei (2/2/0) (= Nordpol rechts vorne) Jetzt dreht man alle Sensoren um 45° nach links (vom Flugzeug aus gesehen). Heraus kommt jetzt in jedem Fall (0/sqrt(2²+2²)/0). (Kann man ausrechnen nach Pythagoras) Was man daraus schließen kann? Egal wie man dreht, der Vektor den man rausbekommt kann man genauso gut aus dem ersten Vektor berechnen, und aus diesem kann man nur Kurs und vertikale Abweichung berechnen. Schade, wäre wohl mit die einfachste Lösung gewesen.
Haben sich unsere Posts überschnitten? Mit 4 Sensoren kann es nie passieren, dass 2 null sind.
Die haben sich nicht überschnitten, aber auch mit 4 Sensoren kommt man nich viel weiter. Das Problem ist nicht, dass mehrere Sensoren null ausgeben. Die 4 oder 3 Sensoren messen im Grunde die Richtung zum Nordpol. Wenn man dann nochmal misst, z.B. in einem Abstand von 45°, bekommt man den gleichen Vektor raus - nur um 45° verschoben. Mit dem zweiten Vektor kann man nicht mehr ausrechnen können als mit einem alleine, da man den zweiten Vektor aus dem ersten ausrechnen kann. Funktioniert also nicht :\ MfG
o.k. soweit habt ihr alle recht lustig wäre aber jetz die kombination aus beschleunigungssensoren und kompassensor. um axiale rotationen zu rkennen mus man zsätlich sensoren auserhalb der achsen haben ich ahbe vorhin nicht von ungefär von bis zu 8 sensoren gesprochen so wollte ich des schwerefeld der erde kompensieren um sowol unkompensierte als auch kompensierte vektoren zu erhalten aus der differnz ergäbe sich das die richtung und stärke der schwerkraft unabhängig von der bewegungsrichtung. der kompas solte wen ich das richtig verstanden habe ähnlich wirken ? problematisch sehe ich bei aller rechnerei immernoch die drift und hier werden absolute korrekturen benötigt , nicht oft aber immer wieder. und da beist sich die katz in den schwanz ultraschall scheidet genauso aus wie licht und luftdruck es sei den laufzeietn Von laserpulsen nach dem funktionsprinzip der waage. vorrussetzung Ebener untergrund , kurze pulse interesant wäre nicht di laufzeit , sondern die laufzeitdifferenz mittels impulssperr ließe sich der zuerst reflektierte impuls ermitteln und eine art 2punktregler könnte das modell stabiliesieren hohe impulsfolgen integriert könnten vielleicht sogar eine art radar simulieren???
Mit Beschleunigungssensoren die Winkelbeschleunigung zu ermitteln dürfte äußerst ungenau sein. Wenn man es doch mit Beschleunigungssensoren machen will, reichen auch 5: Absolut vertikal, Absolut lateral (heißt doch so, oder? Also Beschleunigung in Richtung der Längsachse), und dann 3 relative, da braucht man keine 2 Stück/Achse. Problem: Ausgang muss doppelt integriert werden -> äußerst ungenau. Nächste Möglichkeit: Piezokreisel, oder auch Gyros: Ziemlich teuer, man muss dann allerdings "nur noch" einmal integrieren, das wäre schon genauer. 3 Stück auf Devboards (ohne Devboards sind die in einem BGA-ähnlichen Format) kosten da knapp 300. Zu den absoluten Korrekturen... Bei Roboternetz hab ich was von einem optischen Autopiloten gelesen, der sich scheinbar mittels Thermosensoren am Horizont orientiert. Leider war der Link zu dem PDF-File, in dem das erklärt wurde, tot. Wenn das aber realisiert werden würde, wäre das sicher eine der einfachsten und günstigsten Methoden, zumindest außerhalb von Gebäuden. Dann gibt es noch Infrarot-Distanzsensoren von Sharp, die allerdings max. bis 1,50m messen (Triangulare Messung). Die könnte man für Innenräume verwenden. MfG
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.