Hallo erst mal ans Forum, ich bin neu hier, finde die Artikel und Diskussionen interessant, habe aber außer einem elementaren Wendekreis-Thread zu meinem konkreten Problem noch nichts gefunden. Ich stehe grade auf dem Schlauch. Ich habe ein Dreirad-Auto mit Arduino, mit zwei getrennt angetriebenen Hinterrädern und einem lenkbaren Vorderrad. Wenn ich einen Lenkwinkel \alpha einstelle, entsteht natürlich ein Kreis. Also genauer gesagt drei Kreise, für jedes Rad eins. Wie liegen aber diese drei Kreise? Konkret brauche ich den Geschwindigkeitsunterschied der Hinterräder bei gegebenem Lenkwinkel. Ich bin nicht mal wirklich so weit vorangekommen, bei kleinen als gerade angenommenen Teilbewegungen (also drei Strecken) die Richtungen der Hinterräder rauszukriegen, wenn das Vorderrad eine Einheit in seine Richtung gerade fährt. Den Rest würde ich vermutlich mit Ableitung / Grenzwerten rausbekommen. Ganz konkret reicht mir auch eine Faustformel Winkel -> Tempodifferenz, auf dem AVR werde ich eh keine genaue Sinusfunktion einbauen und die E-Motoren drehen schon irgendwie. Aber um nicht sinnlos Strom zu verpulvern sollten sie schon auf den Unterschied eingehen. Bin für jeden Tip dankbar, kann auch komplexer sein, und eigentlich habe ich auch kein Problem mit höherer Mathematik. Gruß Marco
Hallo, das was Du brauchst ist ein Differenzialgetriebe mit einem Antrieb für die Hinterräder. Oder treibe nur ein Hinterrad an. Das wurde bei den ersten Autos so gemacht, als das Differenzialgetriebe noch nicht erfunden wurde. MfG. Zeinerling
Hm, danke für die schnelle Antwort! Aber zu jedem festem Winkel gibt es ja eine konstante Geschwindigkeitsdifferenz, und da ich über den Arduino jedem Motor ganz einfach eine Geschwindigkeit geben kann, brauche ich "nur" noch diese Umrechnung. Die billigen Motoren sind leider zu schwach, als das ich mit einem auskomme, und die nächststärkeren Motoren brauchen dann gleich wieder viel teurere oder schwerer zu findende "Verstärker". Gruß Marco
Wie du schon erkannt hast, ist das ganze System überbestimmt, denn du steuerst die zwei Freiheitsgrade des Fahrzeugs (Translation und Rotation) mit drei Stellgrößen (Geschwindigkeit der beiden Hinterräder und Lenkwinkel des Vorderrads). Werner hat bereits zwei Vorschläge für mechanische Alternativen gemacht, hier sind noch zwei weitere: 3. Treib das aktiv gelenkte Vorderrad an und lass die Hinterräder passiv mitrollen (wie beim Autoscooter). 4. Treib (wie schon jetzt) beide Hinterräder getrennt an und lass das Vorderrad passiv mitlenken, indem du es als Nachlaufrolle ausbildest (wie beim Einkaufswagen im Supermarkt). Da die Mechanik aber wahrscheinlich schon feststeht, sind hier Antworten zu deiner eigentlichen Frage: > Wie liegen aber diese drei Kreise? Konzentrisch und so, dass die drei Räder jeweils eine Tangente zum entsprechenden Kreis bilden. > Konkret brauche ich den Geschwindigkeitsunterschied der Hinterräder > bei gegebenem Lenkwinkel. Die Geschwindigkeiten der einzelnen Räder sind proportional zu den zugehörigen Kreisradien. Die Kreisradien kannst du leicht anhand einer Skizze mit den drei Kreisen und etwas Trigonometrie ermitteln. Neben dem Lenkwinkel α gehen auch die Spurweite b und der Abstand d des Vorderrads von der Hinterachse in die Berechnung ein. > Aber zu jedem festem Winkel gibt es ja eine konstante > Geschwindigkeitsdifferenz Nicht ihre Differenz ist konstant, sondern ihr Verhältnis.
> ..und eigentlich habe ich auch kein Problem mit höherer Mathematik.
Aber trotzdem Probeleme mit trivialer Geometrie ?
Die ungelenkte Hinterachse ergibt eine Gerade, zu der senkrecht sich die
beiden Hinterraeder bewegen. Das Vorderrad, ohne Schlupf, ergibt eine
weitere Achse, zu der senkrecht sich das vorderrad bewegt. Schnittpunkt
der beiden Achsen ist der Drehpunkt, um den sich das Fahrzeug bewegt.
Viel einfacher wäre ein elektrisches Differential aka Motorreihenschaltung für die beiden Hinterräder nur eine H-brücke und Gleichstrommotore. I1=I2, U=U1+U2, Kein Schlupf kein Über- oder Untersteuern. bei zwei Brushlessmotoren müsten die Regler die Kommutation aus dem Ankerwinkel sebst ermitteln und der Sollwert des 2. Motors aus dem Summensollwert und dem Istwert des 1. Motors abgeleitet werden um das elektronische Differenzialäquivalent abzubilden. Namaste
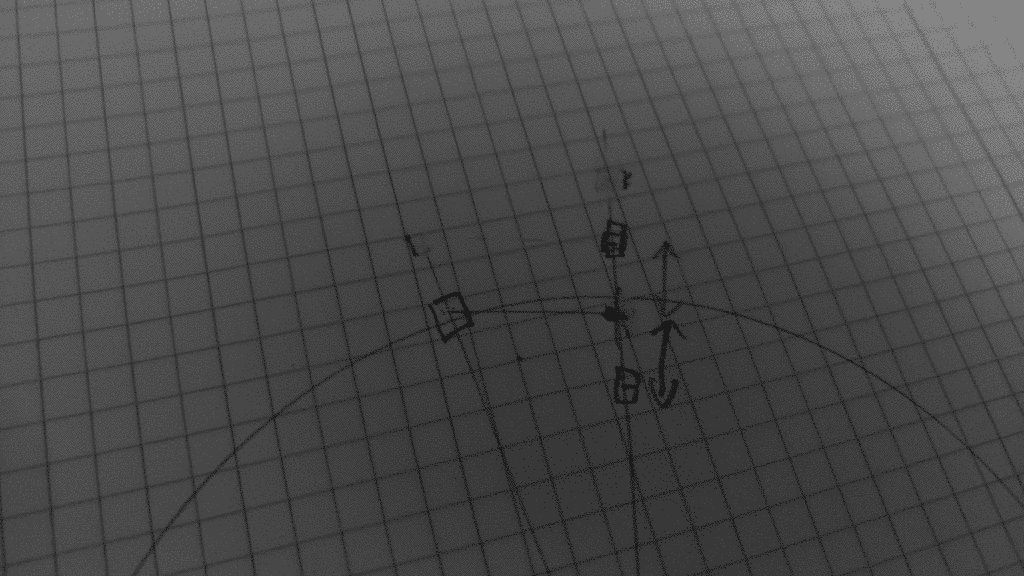
Das bedeutet, das Vorderrad ist auf dem Wendekreis, und der Mittelpunkt des Wendekreises ist auf der gedachten Hinterachse und auf der Lenkachse. Bei zu großem Einschlag liegt der Wendekreismittelpunkt theoretisch im Fahrzeug (da müsste ich dann vermutlich ein Rad rückwärts drehen), ansonsten habe ich ein rechtwinkliges Dreieck zwischen Mittelpunkt Hinterachse (im Wendekreis), Vorderrad und Wendekreismittelpunkt. Das hilft schon mal, danke. Die Änderung der Mechanik ist nicht so einfach, da ich an das Vorderrad keinen Antrieb kriege. Die andere Lösungsidee ist auch gut, habe ich ausprobiert, aber wegen der leistungsschwachen Motoren leider nicht gut genug. Aber auch da braucht man für eine vernünftige Lenkung ja eine Vorstellung, wie sich die Verhältnisse der Geschwindigkeiten ändern.
Angehängte Dateien:
-

skizze.gif
92 KB -

unten.jpg
140 KB -

oben.jpg
160 KB
{kind=link}
OK, wenn die Hinterachse und die Vorderradachse genau auf den Mittelpunkt zeigen, ist es wirklich nicht so schwer. Länge des Autos sei
, Abstand der Hinterräder vom gedachten Achsenmittelpunkt
. Einschlagwinkel
. Radius des Kreises Vorderachse
Radius des Kreises zur hinteren Mitte
Dann haben wir den linken und den rechten Radius (hier mal Linkslenkung) als
Das probier ich mal aus, vermutlich nehme ich noch den Tangens auseinander und ersetze durch geeignete Sinus (Integer-Arithmetik). Auf jeden Fall danke, ich wusste nicht, wie sich die Hinterachse bei dem ganzen verhält und wo sie hinzeigt.
Yalu X. schrieb: > Treib (wie schon jetzt) beide Hinterräder getrennt an und lass das > Vorderrad passiv mitlenken, indem du es als Nachlaufrolle ausbildest > (wie beim Einkaufswagen im Supermarkt). Das geht auch. Allerdings sitzt bei einem Auto oder Fahrrad die senkrechte Achse des Vorderrads "VOR" der senkrechten Lenkachse, sodass zuerst das Vorderrad durch die Kurve fährt. Das restliche Fahrzeug wird dann durch die dadurch entstehende Fahwergsgeometrie "zwangsläufig durch die Kurve gezogen". Wäre das nicht so, könnte man mit einem Fahrzeug auch keine Kurven fahren. Bei einem Einkaufswagen wird die Kurvenfahrt dadurch eingeleitet, indem man durch die Griffstange den Wagen durch die Kurve zwingt. Bei einem Auto oder Fahrrad wird die Kurvenfahrt durch die Schrägstellung der Vorderräder erzwungen. An einem Fahrrad kann man das gut sehen. Denn die Vorderradgabel ist im unteren Bereich nach vorne gebogen. MfG. Zeinerling
Du musst noch aufpassen, wenn α in die Nähe von 90° kommt. Das ist der Fall, wo das Vorderrad quer steht und das Fahrzeug um den Mittelpunkt der Hinterachse dreht. Da dann tan(α) sehr groß wird, enstehen numerische Probleme. Ein anderer kritischer Fall ist tan(α) ≈ d/s. Das ist der Fall, wo das Fahrzeug um das linke Hinterrad dreht. Dadurch hat dieses eine Geschwindigkeit nahezu 0, und damit ist der Faktor zwischen den beiden Geschwindigkeiten riesig bis unendlich. Wenn der Lenkwinkelbereich deutlich kleiner ist, sollte das kein Problem sein. Andernfalls ist es günstiger, die Geschwindigkeit der Hinterräder nicht auf das jeweils andere Rad zu beziehen, sondern bspw. auf die Geschwindigkeit des (unangetriebenen) Vorderrads.
Danke für die Grenzfälle, hatte ich als Mathematiker auch gleich durchgerechnet, bei mir sind das 63° für Hinterachse. Da ich sin, cos und tan nicht wirklich abbilden will im Arduino (Rechenzeit/Speicherplatz), habe ich versucht, den tan zu approximieren. Bis mir dann aufgefallen ist, dass ich doch gleich mein gesamtes Verhältnis approximieren könnte. Herausgekommen ist dann ein sehr erfreuliches
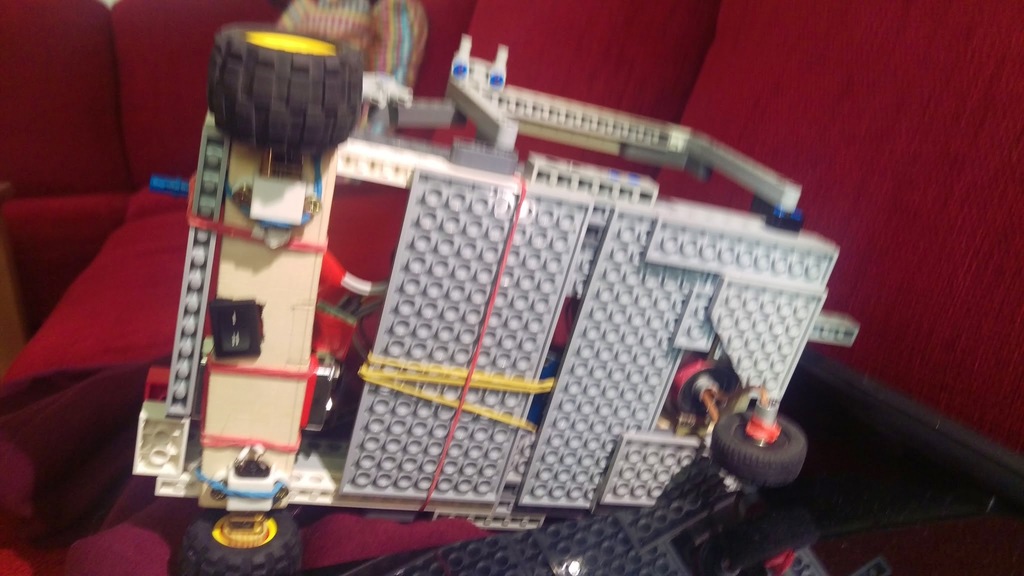
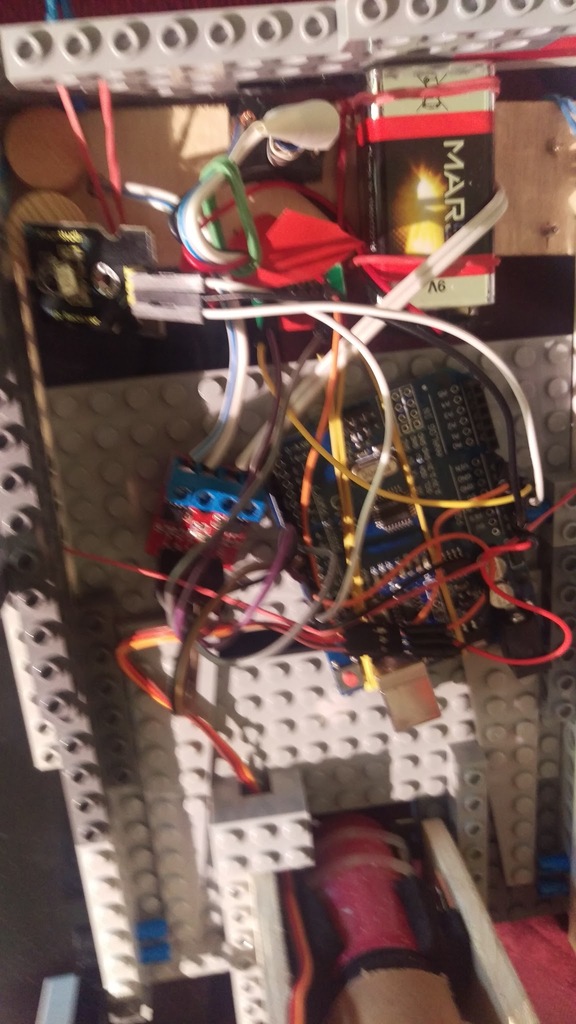
Mal das Sheet: https://docs.google.com/spreadsheets/d/1aSdWZZiLQhMx9o9DuEdi_Fp6-ZeNI64OQa80r0JaDRE Wenn man sich das kopiert, kann man die eigene Geometrie auch eintragen. @Forum: falls diese am Ende ja doch nicht ganz naheliegende Lösung irgendwo anders interessant sein sollte, kann ich das Ganze auch noch mal "didaktischer" aufbereiten, dann bitte Bescheid geben. Das Auto selbst sind nur zwei Getriebemotoren mit Holzknubbeln in Legoräder "montiert", eine L9110 H-Bridge, ein TowerPro MicroServer 9G und ein Arduino. Mit Infrarot fernbedient (Jaja, ich weiß, alles andere als optimal, aber 2,45 Euro inklusive Sensor ist für ein allererstes Bastelprojekt im fortgeschrittenen Alter einfach ein Einstieg). Plus drei alte Kugellager eines Skateboards, ein Schalter und eine Batterie.
Zwölf M. schrieb: >> ..und eigentlich habe ich auch kein Problem mit höherer Mathematik. > > Aber trotzdem Probeleme mit trivialer Geometrie ? Ja, vor allem da ich nicht wusste, wie die (virtuelle) Hinterachse bei dem Ganzen steht. Da hilft auch kein Mathe-Diplom. :-P
Marco G. schrieb: > Wenn ich einen Lenkwinkel \alpha einstelle, entsteht natürlich ein > Kreis. Also genauer gesagt drei Kreise, für jedes Rad eins. Wie liegen > aber diese drei Kreise? > > Konkret brauche ich den Geschwindigkeitsunterschied der Hinterräder bei > gegebenem Lenkwinkel. Die Traktrix könnte ein Startpunkt sein für weitere Berechnungen. Am Beispiel der Anwendung im Straßenbau wird der Zusammenhang zu deinem Problem IMHO am deutlichsten: https://de.wikipedia.org/wiki/Traktrix#Anwendung_im_Stra.C3.9Fenbau
Winfried J. schrieb: > Viel einfacher wäre ein elektrisches Differential aka > Motorreihenschaltung für die beiden Hinterräder nur eine H-brücke und > Gleichstrommotore. > I1=I2, U=U1+U2, Kein Schlupf kein Über- oder Untersteuern. Das klingt sehr verlockend, aber ich verstehe nicht, wieso das funktioniert. Hier mal das Verständnis mit billiger Schulphysik. Wenn ich zwei simple Gleichstrommotoren in Reihe schalte und eine Linkskurve fahre, wächst der mechanische Widerstand des linken Motors, weil das linke Rad langsamer fährt. Damit wächst ja auch der elektrische Widerstand. Das wiederum sollte doch dazu führen, dass dort mehr Spannung abfällt und damit mehr Leistung - mir klingt das eher nach einer sehr cleveren Geradeaus-Stabilisierung auf schwierigem Gelände. Ausprobieren kann ich es aber leider nicht, da meine 9V Batterie die zwei Motoren in Reihe nicht auf Trab bringt. > bei zwei Brushlessmotoren müsten die Regler die Kommutation aus dem > Ankerwinkel sebst ermitteln und der Sollwert des 2. Motors aus dem > Summensollwert und dem Istwert des 1. Motors abgeleitet werden um das > elektronische Differenzialäquivalent abzubilden. Das klingt nach irgendwie geregelten Motoren, die habe ich bisher nicht angeschaut. Meine Motoren sind Fingerkuppengroß und ganz einfache Gleichstrommotoren, denen ich über die H-Bridge und PWM einfach unterschiedlich viel Spannung gebe. Wahrscheinlich ist die PWM auch weit davon entfernt, linear in die Geschwindigkeit einzugehen.
Marco G. schrieb: > Wenn ich zwei simple Gleichstrommotoren in Reihe schalte und eine > Linkskurve fahre, wächst der mechanische Widerstand des linken Motors, > weil das linke Rad langsamer fährt. Damit wächst ja auch der elektrische > Widerstand. Nein, umgekehrt: Wird der Motor abgebremst, sinkt sein Widerstand. Bei einem idealen DC-Motor (also ohne ohmsche Wicklungswiderstände, ohne magnetische Verluste, ohne Lagerreibung usw.) ist das Drehmoment proportional zum Strom und die Drehzahl proportional zur Spannung. Schaltet man zwei dieser Motoren in Reihe, ist der Strom und damit das Drehmoment bei beiden gleich, genau wie das auch beim mechanischen Differential der Fall ist. Des Weiteren ist die Summe der beiden Spannungen gleich der angelegten Spannung. Bei konstanter angelegter Spannung ist also die Summe der beiden Drehzahlen konstant. Beim mechanischen Differential ist bei konstanter Antriebsdrehzahl die Summe der beiden Abtriebsdrehzahlen ebenfalls konstant. Auch hier haben wir also gleiches Verhalten. Bei einer Kurvenfahrt wird das innere Rad abgebremst, d.h dessen Drehzahl sinkt. Damit sinkt auch die Spannung am inneren Motor. Bei konstanter Gesamtspannung muss dadurch die Spannung am äußeren Motor und damit auch dessen Drehzahl steigen. Das Ergebnis ist eine (zumindest theoretisch) schlupffreie Kurvenfahrt. Da reale Motoren verlustbehaftet sind, stimmt dort diese Rechnung nicht exakt, aber wahrscheinlich mit einer für deine Anwendung ausreichenden Genauigkeit. Ich würe es einfach mal ausprobieren.
exakt, wie Yalu es beschrieben hat war es von mir gemeint. Der mechanische Widerstand am einen Motor bewirkt eine Drehzahlerhöhung am anderen Motor. Bei Motoren mit gleichen ohmschen Verlusten kompensiert sich die schaltung selbst. Wenn du nur vorwärts fahren willst genügt ein Akku mit der doppelten Nennspannung der Motoren (+1V für Verluste am Leistungstransistor/ Darlingtontransistor) den Transistor benutzt du als Lowsideswitch und machst die Geschwindigkeit via PWM. Die Fahrtrichtung kannst du dann mit einem Relais mit 2 Wechslerkontaktsätzen( Wendepolschaltung) umschalten aber bitte nur im Stilltand sonst brennen die Kontakte schnell ab. Namaste
Marco G. schrieb: > Damit wächst ja auch der elektrische > Widerstand. Nein er sinkt, da die Gegenspannung welche durch die (drehzahlabhängige) Gegeninduktion aufgebaut wird sinkt. Aber das ist Theorie. Sie passt und wichtig für dich ist, dass es funktioniert. Namaste
Übrigens funktioniert das elektrische differenzial auch für ein seriöses Vierradfahrzeug mit gelenkter Vorder-(Hinterachse)Achse. Namaste und viel spass beim spielen damit.
Einziger Nachteil der Sache wie beim mechanischen differential auch sinkt der Reibwert ein einem Rad so dreht dieses durch und das Ander bekommt kaum Drehmoment. Namaste
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.