Hi,
Ich bin gerade am erlernen von ARM auf einem STM32F3Discovery Board.
Die GPIO Manipulation habe ich nun verstanden und möchte mich nun dem
USART widmen. Ich nutze folgende programming reference:
http://www.st.com/content/ccc/resource/technical/document/reference_manual/59/b9/ba/7f/11/af/43/d5/CD00171190.pdf/files/CD00171190.pdf/jcr:content/translations/en.CD00171190.pdf
Nun sind hier aber die Register nicht so beschrieben, wie ich mir das
von AVR gewohnt bin, man sieht also nirgends, wo man die Flags setzen
sollte.
Wenn ich z.B das Register USART_CR1 für die Wortlänge der Transmission
beschrieben möchte, finde ich nirgends etwas, welche Bits ich
manipulieren soll? Gibt es irgendwie noch eine detailliertere
programming reference?
Grüsse Hans
Wenn ich nun z.B die Wortlänge auf 8bit setzen möchte, muss ich ja M1
und M0 in USART_CR1 zu 0 setzen.
In AVR konnte ich ja direkt USART_CR1 &= ...
In ARM aber muss ich nun USART_CR1_M abändern, doch wie setze ich diese
beiden bits? Die grösse sollte doch 2bit sein?
Ich habe gesehen, es werden oft structs verwendet, um die GPIO-Pins oder
auch USART zu initialisieren:
USART_InitTypeDef USART_InitStructure;
Welche Bibliotheken müssen da eingebunden werden? Gibt es da eine
programming reference für all diese Funktionen?
Grüsse Hans
Die Peripherien sind in Strukturen beschrieben und nicht so
hingeklatscht wie im AVR.
das sieht dann so aus:
RCC->AHB1RSTR oder wie auch immer so ein Register heißen mag. Und da
kannst du dann auch deine gewohnten Bitoperationen drauf ausführen.
RCC ist dann ein Pointer auf die Struktur.. schreib das einfach mal hin
und lass von der IDE nach der Definition suchen. Dann wirst du sehen,
dass es etwas ähnliches auch für die USART gibt.. musst nur mal ein
bischen schauen.
Ich habe die letzten Wochen mit den ARMs von NXP herumgespielt.
Dort ist das viel einfacher. Die haben eine API mit dabei, teilweise
sogar im ROM. Die serielle Schnittstelle war mit 10 Zeilen erledigt.
Keine Bitfriemelei dabei, ich habe dafür kein Register direkt gesetzt.
Nur so als Hinweis, wie es auch besser gehen kann. Weil der STM doch oft
so hoch gelobt wird...
PittyJ schrieb:> Keine Bitfriemelei dabei, ich habe dafür kein Register direkt gesetzt.
Dafür gibt es bei ST die SPL und die HAL. Aber man sollte es zumindest
einmal richtig gemacht haben um zu wissen wie es geht, das erleichtert
die Fehlersuche ungemein.
Bert S. schrieb:> Nun sind hier aber die Register nicht so beschrieben, wie ich mir das> von AVR gewohnt bin, man sieht also nirgends, wo man die Flags setzen> sollte.
Es gibt mehrere Arten, die Hardware-Register für die Verwendung in C zu
definieren. Eine Art ist, ein struct zu definieren und dann einen
Pointer drauf zu definieren. Eine andere Art ist, jedes einzelne
Register zu definieren. Mir liegt die zweite Version mehr, weil es in
der ersten wegen diverser Leerstellen immer nötig ist, Fülleinträge in
structs einzuführen und die gerade gültigen Alignment-Konventionen
einzuhalten, sonst geht das schief.
Die zweite Version sieht etwa so aus:
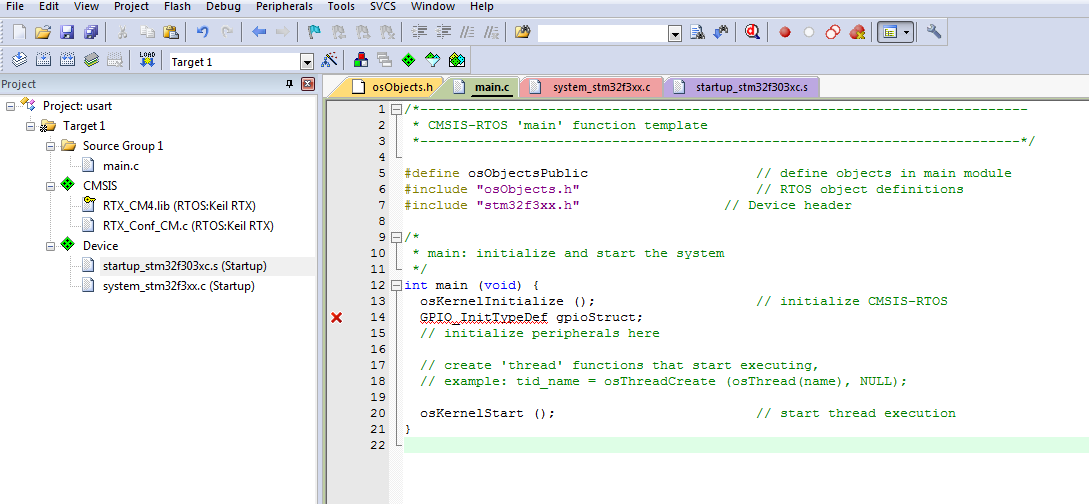
Wenn ich die Variante mit dem Struct verwende, kommt die Fehlermeldung:
"use of undeclared identifier USART_initTypeDef"
Muss ich noch eine Library einbinden, damit ich das verwenden kann?
Ich verwenden Keil uVision5. "Driver_USART.h" habe ich bereits
eingebunden.
Ich habe gesehen, das es noch das STM32CubeMX gibt, lässt sich damit
leichter alle Treiber einbinden?
Ich begreife nicht ganz, wie ich mit STM32CubeMX ein Keil Projekt öffnen
kann. Ich müsste ja in uVision 5 folgendes Framework haben:
http://www.keil.com/pack/doc/STM32Cube/General/html/cubemx_proj.html
Dies ist bei mir nicht vorhanden und ich kann es mit dem package
installer in Keil auch nicht installieren. Ich verwende die Keil MDK521A
und die neuste STM32CubeMX Version.
Grüsse Hans
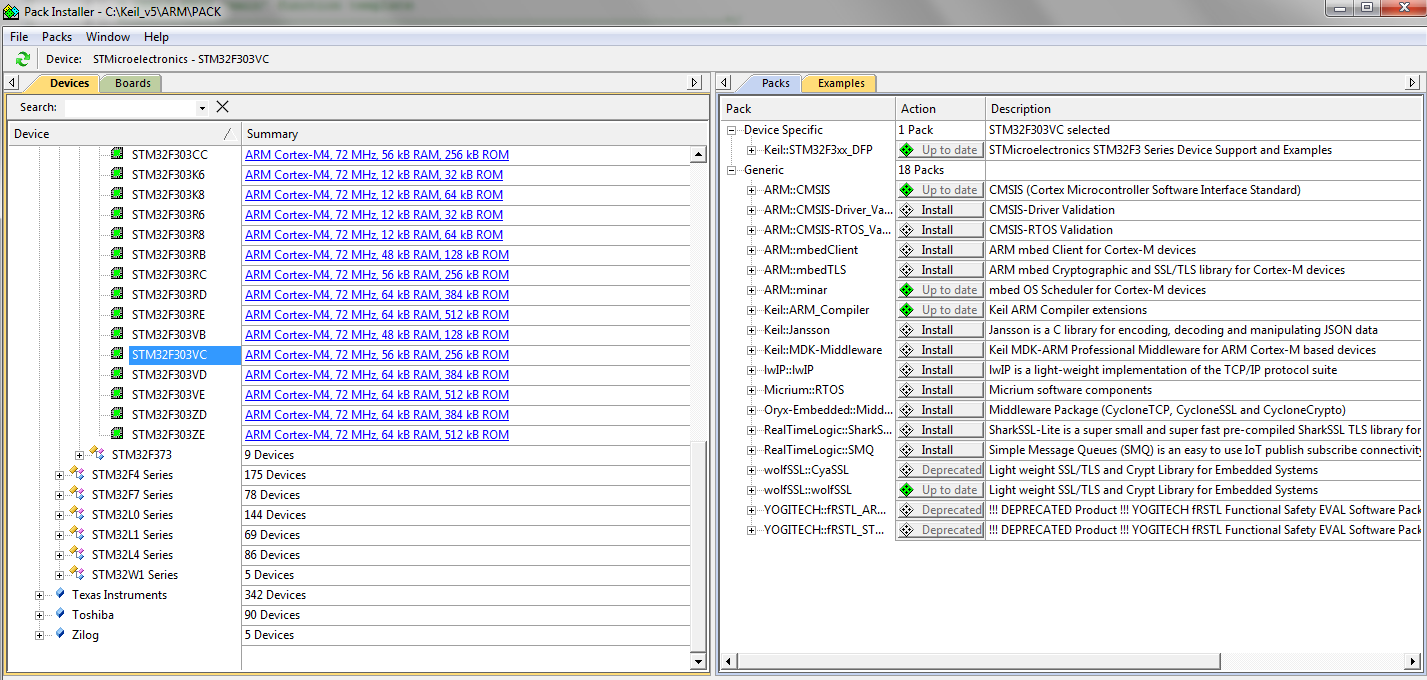
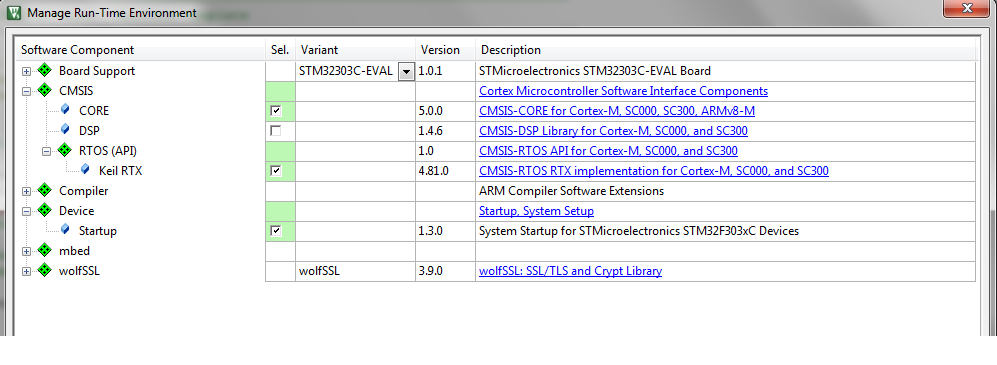
Ich habe hier nun mal meine Einstellungen im Anhang. Wie komme ich zur
stm32F30x_gpio.h library etc? Irgendwie müsste ich doch im package
installer noch ARM:CMSIS Driver auswählen können, ich habe aber nur
validation zur Verfügung?
Bert S. schrieb:> Ich bin gerade am erlernen von ARM auf einem STM32F3Discovery Board.> Die GPIO Manipulation habe ich nun verstanden und möchte mich nun dem> USART widmen. Ich nutze folgende programming reference:
Wie man am Titel erkennt, nennt sich dieses Dokument "Reference Manual",
nicht "programming reference". Außerdem ist das für die STM32F1
Controller, und daher für dein STM32F3 Discovery doch etwas ungeeignet.
Ich finde einfach keine Library, damit ich USART_initTypeDef,
GPIO_initTypeDef etc. nutzen kann. Dies sollte doch standardmäßig
vorhanden sein in der Keil MDK 5?
Bert S. schrieb:> Ich finde einfach keine Library, damit ich USART_initTypeDef,> GPIO_initTypeDef etc. nutzen kann.
Die nennt sich "Standard Peripheral Library" und kann von der STM32
Seite heruntergeladen werden.
> Dies sollte doch standardmäßig> vorhanden sein in der Keil MDK 5?
Keine Ahnung, aber ich würde mal davon ausgehen.
Bert S. schrieb:> Der Einstieg ist schon ziemlich schwieriger als in AVR
Hättest nur statt STM32 einen LPC ARM zu nehmen brauchen, da ist das
Manual übersichtlich und mit Beispielen zum Abtippen.
Bert S. schrieb:> Ich finde einfach keine Library, damit ich USART_initTypeDef,> GPIO_initTypeDef etc. nutzen kann. Dies sollte doch standardmäßig> vorhanden sein in der Keil MDK 5?
Sowas ist standardmäßig NIRGENDWO vorhanden. Allenfalls hat irgendwer
(z.B. die von ST) sowas mal geschrieben und in deren herunterladbaren
Krempel verpackt.
Aber WOZU willst du unbedingt darauf herumreiten? Schau in das
Referenz-Manual, dort findest du die erschöpfende Beschreibung der
Peripherie und deren Hardware-Register nebst den dort üblichen Namen der
Register.
Das und nur das ist es eigentlich, was von allen anderen verstanden
werden kann, denn das Referenzmanual ist eben das, was der Name sagt:
die Referenz.
Sämtlicher Hoppelpoppel, der woanders und mit anderen Bezeichnern
beschrieben oder definiert ist, ist eben keinerlei Referenz.
Wie man Hardwareregister in C definieren kann und sie anschließend
benutzen kann, habe ich dir bereits geschrieben. Also solltest du damit
keinerlei Probleme haben. Aber den Blick in die Doku des Chips kann dir
keiner abnehmen, das mußt du schon selber tun.
Es ist nicht auszuschließen, daß ich eine aus dem RefMan der STM32F30x
generierte Headerdatei hier schon mal jemand anderem gepostet habe. Aber
ich suche jetzt nicht danach. Lerne du lieber mit den Originalen
umzugehen. Das ist auf lange Sicht das Beste, was du für dich selbst tun
kannst.
W.S.
Tja.. das ST-Zeugs erzeugt halt bei Anfängern die Illusion, sie könnten
sich das Durcharbeiten des Reference Manuals ersparen. Eigentlich sollte
man mit der Einstellung lieber gleich zum Arduino gehen, der ist genau
dafür gemacht.
Sobald aber auch nur irgendwas hakt, beispielsweise weil die ST-Libs
buggy sind, muß man nicht nur das RefMan trotzdem durcharbeiten, sondern
auch noch die Software von ST verstehen. Diese ist wiederum keine
Abstraction Layer, sondern eher eine Obfuscation Layer.
Und dann kommen solche Fragen dabei raus.
Bevor du dir den HOL oder die StdPeriphlib von ST antust schau lieber
mal in den CMSIS-Header. Das ist in deinem Fall stm32f303xc.h . Damit
geht dann nämlich folgendes:
... schrieb:> RCC->AHB1RSTR oder wie auch immer so ein Register heißen mag. Und da> kannst du dann auch deine gewohnten Bitoperationen drauf ausführen.>> RCC ist dann ein Pointer auf die Struktur.. schreib das einfach mal hin> und lass von der IDE nach der Definition suchen. Dann wirst du sehen,> dass es etwas ähnliches auch für die USART gibt.. musst nur mal ein> bischen schauen.
Im Klartext steht dort in Zeile 647
So, ich habe versucht das ganze mal ohne Libraries zu lösen, jedoch kann
ich es nicht genau testen, da ich auf dem STM32F3Discovery die RX und TX
Pins nicht angeschlossen habe und ich auch keinen Pegelwandler zur
Verfügung habe. Das Board hat ja einen USB USER Anschluss, kann ich den
irgendwie verwenden oder wie würdet ihr die USART Kommunikation mit dem
PC Herstellen? Ich möchte mal nur einen Char senden, um zu sehen, ob es
klappt.
Grüsse Hans
Bert S. schrieb:> RCC->APB1ENR |= (1<<17); //ENABLE> USART2 Clock> USART2->CR1 &=!((1<<28)|(1<<12)); //8-bit> transmission (bit 12,28)> USART2->CR1 |=(1<<7)|(1<<5)|(1<<3)|(1<<2)|(1<<0); //Enable> RX/TX(2,3), TX/RX Interrupt (5,7), UART Enable(0)> USART2->CR2 &=!((1<<13)|(1<<12));
Das ist vollkommen grausam.
Du solltest Dir abgewöhnen solche Sachen wie
(1<<7)|(1<<5)|(1<<3)|(1<<2)|(1<<0) direkt in den Code reinzuschreiben
sondern stattdessen die Bitdefinitionen aus den Headern zu verwenden,
dann kann man es sogar lesen und verstehen ohne die Kommentare am Ende
jeder Zeile.
Ich gebe Dir ein Beispiel:
Betrachte Deine Zeile aus obigem Code wo Du schreibst:
Du warst gezwungen aufgrund der Tatsache daß kein Mensch beim Lesen
auswendig wissen kann was bits 7,5,3,2 und 0 bedeuten ohne das Manual
aufzuschlagen einen erklärenden Kommentar hinzuzufügen. Jedoch kann der
Compiler nicht überprüfen ob der Kommentar zu den Zahlen passt und der
geneigte Leser (oder der der den Fehler sucht) muss auf den Verdacht hin
trotzdem wieder jedes einzelne Bit nachschlagen, allein schon um einen
Tippfehler auszuschließen.
Aber in den Headern sind auch die Namen für alle Bits definiert!
Jetzt schau mal wie man obige Zeile ordentlich hinschreiben kann:
1
USART2->CR1|=USART_CR1_TXEIE
2
|USART_CR1_RXNEIE
3
|USART_CR1_TE
4
|USART_CR1_RE
5
|USART_CR1_UE;
Alle Bits haben Namen! Du kannst Dir auch die Auto-Vervollständigung
zunutze machen: Wenn Du weißt daß du das TXEIE Bit in einem der USART
config Register setzen willst (aber vergessen hast in welchem und wie
das genau buchstabiert wird) schreibst Du USART_ drückst Ctrl-Space und
gehst die Liste durch. Dann steht da irgendwo USART_CR1_TXEIE, das ist
die Bitmaske für dieses Bit in diesem Register, dann weißt Du daß Du
USART2->CR1 |= USART_CR1_TXEIE
schreiben mußt.
Probiers aus, ist ganz einfach, die haben das konsequent durchgezogen.
Jedes Bit ist definiert nach dem selben Schema:
PERIPHERIE_REGISTERNAME_BITNAME
und Das Register selbst ist
PERIPHERIE->REGISTERNAME
also um es zu setzen:
PERIPHERIE->REGISTERNAME |= PERIPHERIE_REGISTERNAME_BITNAME
Wobei REGISTERNAME und BITNAME wortwörtlich denen im Manual
entsprechen. Keine Zahlen mehr merken oder nachschlagen oder noch
schlimmer: nie mehr versehentlich die falsche Zahl hinschreiben und
stundenlang nach dem Fehler suchen weil die nackte Zahl keinen Namen hat
und in dem nichtssagenden Zahlenwust nicht weiter auffällt.
Ok, dass hatte bei mir nicht geklappt, da ich keinen Unterstrich
verwendet habe, danke. Ich kenne diese Darstellung von AVR her und
bevorzuge das natürlich.
Bernd K. schrieb:> Das ist vollkommen grausam.
Naja.. JEIN.
Ganz so grausam ist das nicht, aber dazu gehört eben etwas anderes als
lediglich irgend eine schlimme Funktion in main.c hineinzuklatschen.
Der TO hat sich offenbar lediglich eine grauselige unsystematische Art
angewöhnt, seine Firmware zu schreiben. Bei seinem bisherigen AVR
scheint ihm das nicht weiter auf die Füße gefallen zu sein:
Bert S. schrieb:> Ich bin gerade am erlernen von ARM auf einem...>> Nun sind hier aber die Register nicht so beschrieben, wie ich mir das> von AVR gewohnt bin,...
Aber wenn man von einem kleinen Achtbitter auf einen ARM umsteigt, dann
sollte man zu allererst sich wenigstens ETWAS Systematik angewöhnen.
Das heiß im Klartext, sich Hardwaretreiber zu schreiben, die den
zugrundeliegenden Kruscht abstrahieren und kapseln und in sich die
gesamte Funktionalität erledigen, die man braucht, um sich in höheren
Programmschichten nicht mehr um einzelne Bits und andere niedere Dinge
kümmern zu müssen.
Innerhalb so eines Treibers kann man dann durchaus mit (x<<7) und
dergleichen arbeiten, denn der Bereich des Ganzen ist eingeschränkt, ist
also eher überschaubar und normalerweise muß man da nicht wieder ran,
wenn das Ganze erstmal ausgetestet ist.
Viel eher hätte ich da Sorgen, daß all die von dir vorgeschlagenen
Bit-Namen-Definitionen, die man in irgend einer obskuren Headerdatei
findet, auch wirklich so stimmen wie im RefMan gedruckt.
Weitaus grauseliger finde ich sowas:
Bert S. schrieb:> void sendChar(void const *argument) {> while(1) {> USART2->TDR = 'x';> osDelay(500);> }
Mal abgesehen von der Form, was soll das? Sieht SO etwa eine
ernstzunehmende serielle Schnittstelle aus?
W.S.
W.S. schrieb:> Bert S. schrieb:>> void sendChar(void const *argument) {>> while(1) {>> USART2->TDR = 'x';>> osDelay(500);>> }>> Mal abgesehen von der Form, was soll das? Sieht SO etwa eine> ernstzunehmende serielle Schnittstelle aus?
Ich wollte nur mal schauen, ob ich ein Signal am richtigen PIN empfange,
dass soll keine Schnittstelle darstellen, doch irgendwo scheint noch
etwas mit dem USART2 nicht zu stimmen, bekomme zumindest kein Signal am
PIN PA2.
Ich werde natürlich vernünftige Treiber selber schreiben, aber zuerst
mal muss ich schauen, wie genau was funktioniert, daher ist ein einfach
gehaltenes Programm sicher sinnvoll. Zumindest die Debug Schnittstelle
mit Hilfe des USART sollte mal laufen.
Grüse Hans
Bei den neueren Discovery und Nucleo Boards ist normalerweise immer ein
USART mit dem ST-Link verbunden, d.h. du kannst per virtuellem COM-Port
damit interagieren, ohne das du einen dedizierten USB-UART-Wandler
brauchst.
Im Falle des F3 Disco ist das USART1 (Achtung, der hängt an APB2 statt
APB1!).
Warum kein Signal kommen kann:
Du MUSST jeden einzelnen Pin den du benutzen willst, entsprechend
konfigurieren, da (fast) alle Pins nach einem Reset als Input mit PullUp
konfiguriert sind.
Du musst (für den Fall USART1) PA9 und PA10 entsprechend konfigurieren,
d.h. du setzt jeweils für PA9 und PA10 GPIOA->MODER auf "alternate
function", GPIOA->PUPDR auf "pull up" und GPIOA->AFRH auf AF7 (siehe
Tabelle im Datenblatt S.44).
Beim F3-Discovery auf die Revision aufpassen! Erst ab Board Revision C
wird der STLink V2-1 verwendet, der CDC-ACM kann und es sind die SB13/15
geschlossen, so dass Uart Signale an den STLink kommen.
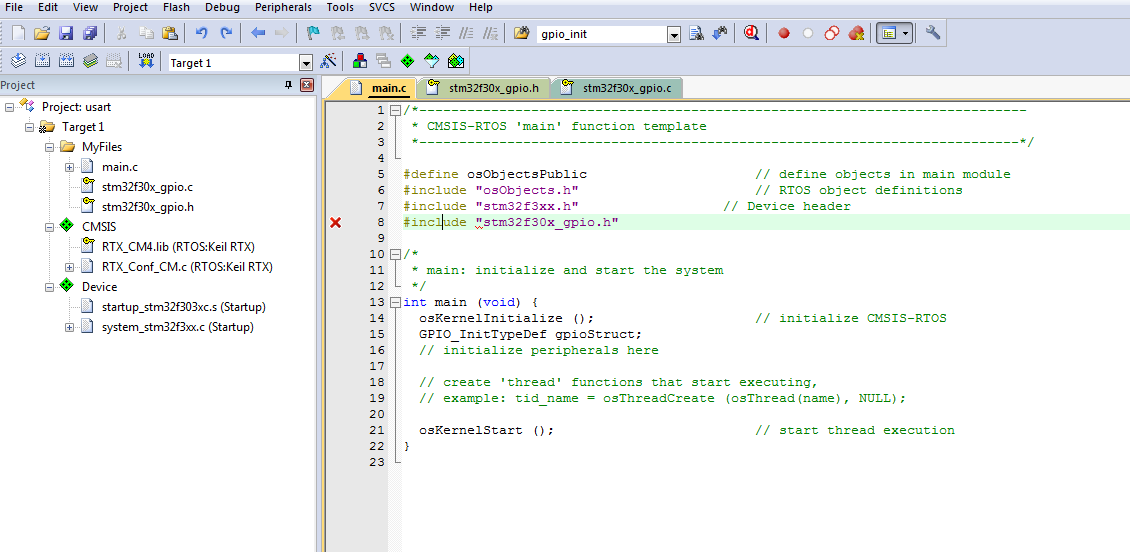
Die GPIO Pins habe ich nun so definiert (Ich glaube nach Datenblatt ist
PC4 der TX Pin für die ST-Link USB Schnittstelle):
1
RCC->AHBENR|=RCC_AHBENR_GPIOCEN;//enable PORTE clock
2
GPIOC->MODER|=GPIO_MODER_MODER4_1;//Alternating function, for TX (PC4)
3
GPIOC->OTYPER&=!(GPIO_OTYPER_OT_4);
4
GPIOC->PUPDR|=GPIO_PUPDR_PUPDR4_0;
Doch ich bekomme immer noch kein Ausgangssignal, nur konstant 3V vom
Pull-Up. Keine Ahnung was man noch ergänzen könnte.
Grüsse Hans
Christopher J. schrieb:> GPIOA->AFRH auf AF7 (siehe> Tabelle im Datenblatt S.44).
Wie genau kann ich das setzen? Bei mir scheint es GPIOA_AFRH nicht zu
geben, es kommt die Fehlermeldung undeclared identifier.
Uwe B. schrieb:> Erst ab Board Revision C> wird der STLink V2-1 verwendet
Wie erkenne ich welches Board ich habe, bzw. welche Revision? SB13/15
scheinen nicht geschlossen zu sein.
Sorry, AFRL und AFRH sind gebündelt in AFR[2], also GPIOA->AFR[0] und
GPIOA->AFR[1].
Dabei ist AFRL für die Pins 0-7 und AFRH für die Pins 8-15 zuständig
(jeweils vier Bits pro Pin). AF7 bedeutet die Bits für den
entsprechenden Pin sind 0x0111.
Bert S. schrieb:> Die GPIO Pins habe ich nun so definiert (Ich glaube nach Datenblatt ist> PC4 der TX Pin für die ST-Link USB Schnittstelle):
Das stimmt glaube ich so nicht.
Im User Manual des F3-Disco steht unter 6.2.3 "VCP Configuration":
> The ST-LINK/V2-B on STM32F3DISCOVERY supports virtual Com port (VCP) on U2> pin 12 (ST-LINK_TX) and U2 pin 13 (ST-LINK_RX), which are connected to the> STM32F303 MCU target STM32 USART1 (PA9, PA10), thanks to SB11 and SB15> solder bridges.> The SB11 (PA9) and SB15 (PA10) default configurations for STM32F3DISCOVERY> are given in Table 5: Solder bridges.
Hier kannst du selber nachschauen:
http://www.st.com/content/ccc/resource/technical/document/user_manual/8a/56/97/63/8d/56/41/73/DM00063382.pdf/files/DM00063382.pdf/jcr:content/translations/en.DM00063382.pdf
Aber Uwe hat Recht, dass das erst ab Rev C der Fall ist.
Bert S. schrieb:> Wie erkenne ich welches Board ich habe, bzw. welche Revision? SB13/15> scheinen nicht geschlossen zu sein.
Auf den Boards ist normalerweise ein weißer Aufkleber da steht so etwas
wie "MB1035 B-00" drauf, wobei MB1035 für das Board steht und B-00 für
die Revision.
Bert S. schrieb:
1
void initUSART(long baudrate) {
2
long baudratio=SYS_FREQUENCY/baudrate;
3
//GPIO
4
GPIOA->MODER |= GPIO_MODER_MODER2_1; //Alternating function
USART2->CR1 &=!((USART_CR1_M0)|(1<<28)); // USART_CR1_M1 does not exist???
10
USART2->CR1 |= (USART_CR1_TE
11
|USART_CR1_TXEIE
12
| USART_CR1_RXNEIE
13
| USART_CR1_RE
14
| USART_CR1_UE);
15
USART2->CR2 &=!((USART_CR2_STOP_0)|(USART_CR2_STOP_1)); //1 stop bit
16
USART2->BRR |= baudratio; //set Baudrate to 9600
17
}
Da sind noch ein paar Fehler drin:
Wenn du einem Register mit einem &= einen Wert zuweisen willst, aber das
Register als Reset-Wert bereits 0x00000000 ist, dann wird es auch nach
dem &= immer noch 0 sein, egal was auf der rechten Seite steht.
Außerdem darfst du nicht das logische mit dem unären ("bitwise") "Nicht"
verwechseln (! ist nicht gleich ~).
!(bliblablub) wird immer zu Null, es sei denn bliblablub ist Null, dann
wird es Eins.
Das AF7 habe ich nun im Low Register gesetzt, doch es tut sich leider
immer noch nichts. Die Invertierung muss natürlich bitwise sein, hatte
das irgendwie gerade vergessen.
Christopher J. schrieb:> Wenn du einem Register mit einem &= einen Wert zuweisen willst, aber das> Register als Reset-Wert bereits 0x00000000 ist, dann wird es auch nach> dem &= immer noch 0 sein
Ist das nicht das Ziel? Das Bit wird gelöscht und wenn es bereits 0 ist,
dann bleibt es Null?
Christopher J. schrieb:> Auf den Boards ist normalerweise ein weißer Aufkleber da steht so etwas> wie "MB1035 B-00" drauf, wobei MB1035 für das Board steht und B-00 für> die Revision.
Bei mir ist es also Revision B-00 (MB1035 B-00). Dann kann ich das mit
dem ST-Link vergessen. Kaufe mir halt ein UART->USB Pegelwandler.
Muss ich vielleicht irgendwelche Register clearen? Ich hatte sowas schon
einmal in AVR, wo alles richtig Programmiert war, aber einige Register
mussten zuerst resetet werden.
Grüsse und Danke Hans
Bert S. schrieb:> USART1->BRR |= baudratio;
Du brauchst den Teil nicht einlesen. Ein einfaches = reicht.
Bert S. schrieb:> while(!USART_ISR_TXE);
Was ist das? USART_ISR_TXE? Ist das eine Funktion die sich ändern kann?
Oder suchst du doch etwas wie:
1
while(!(USART1->SR & USART_SR_TXE));
?
Edit: Da stimmt noch einiges mehr nicht. TX ist da. RX nicht?
UE nicht am Ende gesetzt sondern zwischen der Config?
Sicher dass du die richtigen Pin konfiguriert hast?
Bert S. schrieb:> GPIOA->AFR[0] |= GPIO_AFRL_AFRL7;
Die AF Register haben jeweils 4 Bit pro Pin.
GPIO_AFRL_AFRL7 ist daher die Bitmaske für Pin 7 (0xF0000000).
Wenn du das direkt ins AFRL schreibst konfigurierst du PA7 mit AF15.
Wenn du PA2 als AF7 willst musst du (GPIO_AFRL_AFRL2 & (7U << 8)) ins
AFRL schreiben.
Guck am besten ins RefMan Kapitel 11.4.9
Bert S. schrieb:> Doch ich bekomme immer noch kein Ausgangssignal, nur konstant 3V vom> Pull-Up. Keine Ahnung was man noch ergänzen könnte.
Es jammert einen!
Ich hätte nicht gedacht, daß jemand der nach eigenen Angaben geübt ist
mit Atmels AVR's, derartig heftige Schwierigkeiten hat.
Ich hänge dir mal drei Dinge hier dran:
1. ein Beispiel, wie man seinen STM32F3.. passabel und lesbar
konfigurieren kann
2. ein Komplett-Treiber für die U(S)ART's
3. dito für USB-VCP
Aber die Definitionen der HW-Register und solcher Dinge wie byte, word,
dword machst du dir selber, ebenfalls den Startupcode und die
Programmteile, die auf diese unterste Treiberebene aufbauen, also sowas
wie eine E/A-Weiche, Kommandoprogramm und so.
W.S.
Ich bin langsam am verzweifeln. Das kann doch nicht so schwer sein, eine
UART zu programmieren. Nachdem ich das bisher mit jedem AVR geschafft
habe, komme ich mir nun richtig doof vor.
Ich habe viele Beiträge hier und in anderen Foren gefunden, wo Leute
genau das gleiche Problem haben. Aber leider enden alle ohne Lösung.
Was mache ich falsch?
Stefanus F. schrieb:> // Enable transmitter of USART2> USART2->CR1 = USART_CR1_UE + USART_CR1_TE;
Ich würde niemals sowas hier addieren. Immer verodern.
Ggf. mag der USART ja nicht, dass er angeschmissen wird und TE im selben
Takt angeht. Ich würde da ggf. mal zunächst TE anschmeißen und den USART
danach erst anmachen. Nur als Idee zum suchen.
Die Register vom PA2 hast dir im Debugger auch mal angesehen? Nicht das
dort noch Überraschungen sind (Pullup oder so?).
Jetzt geht es plötzlich. Vielleicht hatte ich bei vorherigen
fehlerhaften Versuchen irgendwie die HW blockiert und das Problem
unbewusst durch Unterbrechen der Stromversorgung gelöst.
Stefanus F. schrieb:> Nico W. schrieb:>> Ich würde niemals sowas hier addieren. Immer verodern.>> Kommt das gleiche bei heraus.
In dem Falle schon. Ich hatte einmal etwas ähnliches und das ist mir auf
die Füße gefallen. Letzendlich willst du ein Bit ändern. Veroderst du
das gleiche Bit ein paar Mal ist das OK. Addieren...
Nico W. schrieb:> Letzendlich willst du ein Bit ändern.
In dieser Zeile will ich wirklich alle Bits des Registers in einem
Abwasch anfassen.
> Veroderst du das gleiche Bit ein paar Mal ist das OK.
Ok, das ist ein einleuchtendes Argument (Fehler vermeiden).
Hallo, jetzt habe ich schon viele Seite durchgesehen und leider keinen
passenden Vorschlag gefunden.
(Ich bin nicht gut mit C und dem STM32 vertraut!!)
Zur Steuerung meiner Modelleisenbahn möchte ich den STM32F103 einsetzen.
Das Ausgeben eines Textes über TX1 funktioniert,
aber vom Terminalprogramm einen Text einlesen über RX1 nicht.
Wer oder wo kann ich hilfe bekommen ?
Vielen Dank im Voraus !
Achim W. schrieb:> Hallo, jetzt habe ich schon viele Seite durchgesehen und leider keinen> passenden Vorschlag gefunden.> (Ich bin nicht gut mit C und dem STM32 vertraut!!)>> Zur Steuerung meiner Modelleisenbahn möchte ich den STM32F103 einsetzen.> Das Ausgeben eines Textes über TX1 funktioniert,> aber vom Terminalprogramm einen Text einlesen über RX1 nicht.>> Wer oder wo kann ich hilfe bekommen ?
Für folgende Aussagen werde ich jetzt vielleicht gesteinigt, aber egal:
Wenn Du neu bei STM32 bist, dann würde ich die Entwicklungsumgebung von
ST nehmen, also STM32CubeIDE.
Die startest Du, machst ein neues STM32 Projekt (mit HAL), wählst den
richtigen STM32F103 und konfigurierst alle Peripherie im integrierten
CubeMX und erzeugst den Code. Dann hast Du schonmal ein funktionierendes
Grundgerüst.
Hier gibts dazu haufenweise Trainingsmaterial:
https://www.st.com/content/st_com/en/support/learning/stm32-education/stm32-moocs.html
Wenn Du das ganze ohne HAL machen willst, dann würde ich mir das für
etwas später aufheben, wenn Du Dich ein wenig besser mit STM32
auskennst.