Hallo, ich habe hier einen Motor dessen Rotorposition ich erfassen will. Jetzt habe ich mir einen Encoder-Chip besorgt welcher die Rotorposition mittels auf dem Rotor befestigten Magneten erfassen soll. AS5047P rotary magnetic position sensor (hier der encoder: http://ams.com/eng/Support/Demoboards/Magnetic-Position-Sensors/Angle-Position-On-Axis/AS5047P-Adapterboard). Ich habe jetzt einen kleinen Magneten auf die Rotorwelle gelegt (dieser haftet nun von selbst auf der Welle da diese aus Stahl ist). Die Platine mit dem Encoder habe ich mittels Heisskleber profisorisch befestigt. Die Platine wackelt aber nicht. Leider schwankt das Signal fuer die Rotorposition sehr stark. Selbst wenn ich den Rotor in nur eine Richtung drehe (Winkel wird erhoeht), dann faellt manchmal der ausgelesene Winkel wieder ein paar Schritte zurueck eher dieser sich wieder erhoeht... Sind solche magnetischen Abstandsencoder wirklich so empfindlich, d.h. muss der Magnet auf der Rotorachse wirklich 100% genau zum Encoder ausgerichtet werden? Hat jemand "aehnliche" Erfahrungen damit? mfg
Gast
#4724338
Hi >Ich habe jetzt einen kleinen Magneten auf die Rotorwelle gelegt (dieser >haftet nun von selbst auf der Welle da diese aus Stahl ist). Was für einen Magnet? Wie ist der magnetisiert? MfG Spess
spess53 schrieb: > Hi > >>Ich habe jetzt einen kleinen Magneten auf die Rotorwelle gelegt (dieser >>haftet nun von selbst auf der Welle da diese aus Stahl ist). > > Was für einen Magnet? Wie ist der magnetisiert? > Hallo, der Magnet war im Paket dabei, er muesste also dafuer geeignet sein. Der Magnet hat die Form eines kurzen Vollzylinders. Ich habe auch schon probiert den Magneten anderst zu positionieren (90 Grad gedreht, etc.) leider ohne merkbare Verbesserung. mfg
Angehängte Dateien:
-

magnetundencoder.jpg
220 KB
Gast
#4724387
Hi >Ich habe auch schon probiert den Magneten anderst zu positionieren (90 >Grad gedreht, etc.) leider ohne merkbare Verbesserung. Aber auf der Stirnseite der Welle (Anlage) sitzt der Magnet. MfG Spess
Angehängte Dateien:
-

Magnet.jpg
5,8 KB
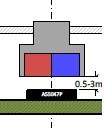
spess53 schrieb: > Hi > >>Ich habe auch schon probiert den Magneten anderst zu positionieren (90 >>Grad gedreht, etc.) leider ohne merkbare Verbesserung. > > Aber auf der Stirnseite der Welle (Anlage) sitzt der Magnet. > > MfG Spess Ja, der Magnet ist wie in deinem Bild positioniert. Der Magnet ist aber sicherlich nicht 100%ig mit der Welle zentriert und der IC sicherlich auch nicht 100% parallel zum Magnet. Mich wundert ob die Teile wirklich so empfindlich sind wenn die nich 100% korrekt positioniert sind...?
Gast
#4724428
Max M. schrieb: > magnetundencoder (1,55 MB, 5 Downloads) Was soll das sein?
Forist schrieb: > Max M. schrieb: >> magnetundencoder (1,55 MB, 5 Downloads) > > Was soll das sein? Hab vergessen das zu loeschen. Haenge .jpg dran und du bekommst das gleiche Bild wie in meinem Beitrag. Hab das Bild ohne .jpg hier hochgeladen und wurde somit nicht als .jpg erkannt...
Gast
#4724585
Servus, eventuell kann das Magnetfeld des Motors Störungen verursachen. Nicht umsonst setzt man optische Encoder auf die Motorwelle drauf, auch wenn diese bei dieser Auflösung ein Vermögen kosten.
Das Prinzip mit dem Magneten funktioniert auf mindestens 9Bit (<1°) wunderbar unter folgenden Voraussetzungen: 1. Das Magnetfeld wird nicht durch Weicheisenteile in der Umgebebung beeinflusst => die Aufnahme des Magneten muss aus nichtmagnetischen Material sein. Sonst wird der Magnet weitgehend "kurzgeschlossen". 2. Wenn der Magnet nicht wirklich gut diametral magntisiert ist, gibt es Probleme bzw. Fehler. Der Vektor der magnetischen Feldstärke muss exakt durchs Zentrum und damit der Drehachse verläufen. Da der Magnet aus dem Demokit ist, sollte das bei Dir aber passen. 3. Sensor und Magnet müssen absolut zentrisch sitzen. Da machen 0,2mm schon viel aus; dieser Wert ist auch bestimmt im Datenblatt angegeben. Um das zu erreichen zentrieren wir Leiterplatte und Motor in einem speziellen Verfahren zueinander und erreichen damit sicher eine Winkelauflösung von 9 Bit (<1° im Winkel) mit einem AS5040 (ohne weitere Zusatzmaßnahmen). 4. Ebenso ist der Abstand des Magneten zum Sensor wichtig. Je nach Größe und Reichweite des Magneten kann das im Chip integrierte HAL-Array noch vernünftig arbeiten: ist das Magnetfeld zu stark kommt es zu einer Übersteuerung, ist es zu schwach ist das Rauschen zu hoch. 5. Um die Genauigkeit weiter zu verbessern, lassen sich manche dieser Chips (z.B. MLX90316) auch (intern) kalibrieren und so höhere Winkelauflösungen und auch höhere Genauigkeiten (12 Bit und mehr) erzielen.
Gast
#4724604
Datenblatt und Application Notes ganz und genau durchgelesen? Gibt es nicht Register, in denen man die Feldstärke und deren Abweichung auslesen kann? Siehe Diagnostic Features im Datasheet. DIAAGC (0x3FFC) MAG (0x3FFD) Im PDF des Adapterboards steht doch eindeutig: Maximale Achs-Abweichung 0,5 mm. Wir verwenden ein klemmbare Aluhülse, in die der Magnet geklebt ist. Nur den Magnet auflegen dürfte bei höheren Drehzahlen (Fliehkraft) schief gehen. Dein Wellendurchmesser? Dein Magnetdurchmesser? Deine Abweichungen? Klartext bitte.
Gast
#4724628
Ich gehe fast jede Wette ein, Du hast Deinen Magneten nicht, wie von
spess53 gezeigt, zum Sensor ausgerichtet, sondern der Sensor wird immer
vom Nordpol oder Südpol beschienen.
z.B.(x-xDrehachse, immer von N beschienen):
x
|
|
|
x
S
|
N
--sensor--
Der Magnet darf nicht mit der flachen Seite zum Sensor zeigen, sondern
so:
x
|
|
|
N-x-S
--sensor--
Ist in dem Fall natürlich schwer zu befestigen. Evtl. Funktion erst mal
ohne Motor testen, d.h. Magneten über dem Sensor per Hand drehen.
Die Magnetisierungsrichtung wird schon stimmen, wenn der Magnet mit dem Sensor geliefert wurde. Bei zu großem Versatz aus der Mitte ist der Effekt aber der gleiche. Mit freundlichen Grüßen Thorsten Ostermann
Gast
#4725315
Thorsten O. schrieb: > Die Magnetisierungsrichtung wird schon stimmen, wenn der Magnet mit dem > Sensor geliefert wurde. Wie kommst du denn darauf? Lies mal: Max M. schrieb: > Ich habe jetzt einen kleinen Magneten auf die Rotorwelle gelegt (dieser > haftet nun von selbst auf der Welle da diese aus Stahl ist). Reicht das? Im Prinzip muß das Magnetfeld quer zur Motorwelle verlaufen und es sollte auch nicht durch selbige kurzgeschlossen sein. Also ein Distanzstück aus Alu drehen und dort den Magneten mit Polarisierung quer zur Welle aufkleben. W.S.
Hi Leute, wollte mich nur mal zurueckmelden. Ich habe die Spannungsversorgung von 5V auf 3.3V geandert und jetzt funzt es einwandfrei. Die Stoersignale sind jetzt nur noch sehr minimal und fuer mich vernachlaessigbar. Je nachdem wie gut ich den Magneten auf dem Rotor zentrieren kann ist das Ganze bis auf etwa 0.5 Grad exakt - ausreichend fuer mich. Das Ganze ist also gar nicht so kritisch wie ich zu Anfangs befuerchtet habe. Eine Positionsregelung ist relativ "einfach" moeglich selbst wenn der Magnet nur von selbst durch dessen Magnetismus auf der Motorwelle haftet. Mein provisorischer Aufbau funktioniert ganz gut und ich bin jetzt auch wieder um eine Erfahrung reicher :) Achja und den Magneten habe ich parallel zum Sensor ausgerichtet. Also der Magnet ist parallel zum Sensor und liegt flach auf dem Rotorstummel. vielen Dank fuer eure Hilfe. mfg
Hallo "W.S.", W.S. schrieb: > Thorsten O. schrieb: >> Die Magnetisierungsrichtung wird schon stimmen, wenn der Magnet mit dem >> Sensor geliefert wurde. > > Wie kommst du denn darauf? Lies mal: Genau, lies mal: Max M. schrieb: > der Magnet war im Paket dabei, er muesste also dafuer geeignet sein. > Max M. schrieb: >> Ich habe jetzt einen kleinen Magneten auf die Rotorwelle gelegt (dieser >> haftet nun von selbst auf der Welle da diese aus Stahl ist). > > Reicht das? Ja, und? Auch diametral magnetisierte Magnete kannst du so auf die Welle pappen. Nicht unbedingt zentiert. Mit freundlichen Grüßen Thorsten Ostermann
Gast
#4729267
Max M. schrieb: > ist > das Ganze bis auf etwa 0.5 Grad exakt Wie bestimmst du diese Winkelgenauigkeit? Hast du einen hochauflösenden und genauen Referenzencoder? Oder rechnest du anhand deiner Positionierung "durchs Getriebe" zurück? Und der Magnet ist immer noch einfach an die Rotorwelle gehaftet?
Info schrieb: > Max M. schrieb: >> ist >> das Ganze bis auf etwa 0.5 Grad exakt > > Wie bestimmst du diese Winkelgenauigkeit? Hast du einen hochauflösenden > und genauen Referenzencoder? Oder rechnest du anhand deiner > Positionierung "durchs Getriebe" zurück? > > Und der Magnet ist immer noch einfach an die Rotorwelle gehaftet? Ich lese den Winkel via SPI aus. Je nachdem wie gut mein Aubau ist (kurze Kabel, Batterie statt Netzteil, Ausrichtung Sensor, etc.) schwankt die Position um 0.5 (+-0.25 Grad) wg. dem Rauschen. Den Magneten hab ich einfach auf die Motorwelle gelegt, der haftet dort sehr gut auch bei ueber 6000 U/min. Klar, ist keine Dauerloesung, aber zum testen reicht das fuer mich. Der Encoder befindet sich direkt am Rotor, ich lese also direkt die Winkellage des Rotors aus.
Info schrieb: > Max M. schrieb: >> ist >> das Ganze bis auf etwa 0.5 Grad exakt > > Wie bestimmst du diese Winkelgenauigkeit? Hast du einen hochauflösenden > und genauen Referenzencoder? Wie genau der Winkel ist weiss ich nicht da ich keine genauere Referenz habe. Was ich jedoch sagen kann dass der Winkel um +-0.25 Grad schwankt wg. dem Rauschen. Da hatte ich mich wohl etwas falsch ausgedrueckt.
Antwort schreiben
Bitte melde dich an, um einen Beitrag zu schreiben.