Hallo, folgendes vereinfachtes Szenario: Mit dem PWM-Ausgang eines µCs soll die Drehzahl eines Motors geregelt werden. Stellgröße und Rückführgröße sind der Einfachheit halber gleich skaliert. Die Zeit von Ausgabe einer neuen Stellgröße bis zum Einlesen einer neuen Rückführgröße ist so groß, dass die Strecke im neuen Arbeitspunkt eingeschwungen ist. Der Algorithmus soll möglichst einfach sein und mit wenigen Abtastungen des Ist-Werts auskommen. Man könnte jetzt also einen P-Regler implementieren. Der hat aber bekanntlich den Nachteil, dass es eine nennenswete Regelabweichung gibt (Verstärkung klein) oder dass das System schwingt (Verstärkung groß). Ich habe mir folgenden Algorithmus ausgedacht (vermutlich gibt es diese Vorgehensweise schon, ich kenne sie nur nicht). Denken wir uns folgende Betriebsfälle: - Die Stellgröße beträgt 20, die Motordrehzahl ist 20 --> Alles prima, nichts zu tun. - Die Stellgröße wird geändert und beträgt jetzt 30, die Motordrehzahl ist nach wie vor 20 --> Die Stellgröße muss um den Faktor 30/20=1,5 erhöht werden. Also ergibt sich als neue Stellgröße 1,5*20=30 - Die Stellgröße beträgt 30, die Motordrehzahl ist 30 --> Alles prima, nichts zu tun. - Die Stellgröße beträgt 30, die Motordrehzahl ist 25, weil sich die Belastung erhöht hat --> Die Stellgröße muss um den Faktor 30/25=1,2 erhöht werden. Also ergibt sich als neue Stellgröße 1,2*30=36 Ich habe das mal im Excel getestet, funktioniert. Aber was ist das für eine Art von Regler? Welche Nachteile hätte diese Art von Regler? Danke Third Eye
Angehängte Dateien:
-

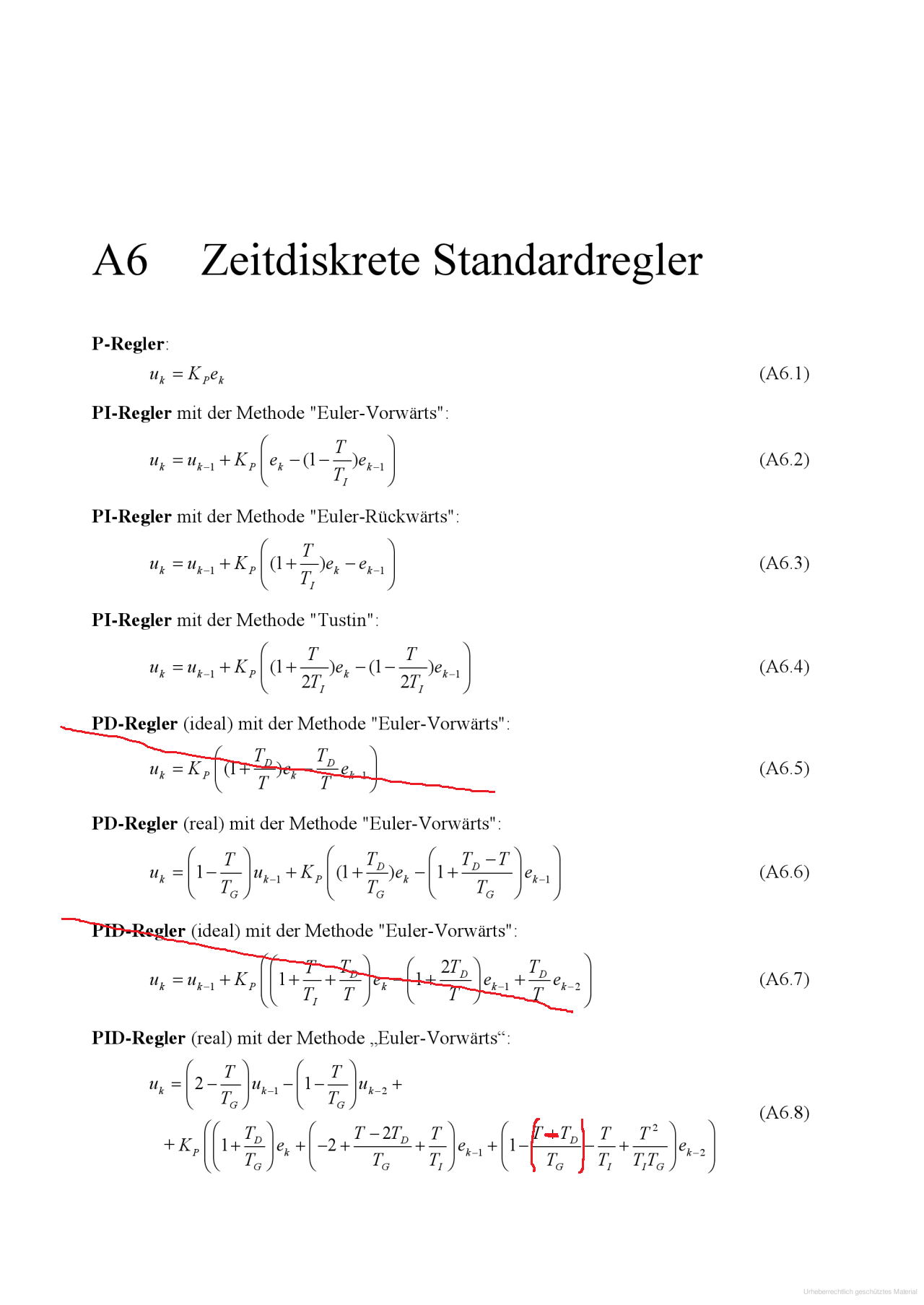
books_002_korrektur.png
200 KB
Servus, wow, Nobelpreis trächtig. So wie sich das anhört versuchst du zu Fuß einen PD-Regler nachzubilden. Das geht in die Hose, weil eine Regeländerung sehr scharf angefahren wird und somit ein ständiges nervöses Überschwingen hervorgerufen wird. Mein Rat an dich: nehme einen klassischen PI-Regler. Achte daraf, dass die Abtastzeit hier "T" konstant ist...
Das Verhältnis von deiner Regelgröße y(t) zu deiner Stellgröße u(t) ist
deine Regelstrecke.
z.b. Stellgröße = Spannung U [V]
Regelgröße = Drehzahl n [U/min]
Die Regelstrecke ist dein Motor. Der Motor kann durch Gleichungen
modelliert werden, sodass ein Term y(t) = f(u(t)) existiert.
Was du hast ist auch nur ein P-Regler, da du/dein Regler nicht mit
Ableitungen oder Integralen der Regelabweichung arbeitet. Dann wäre es
ein PID, ein PI, ein PD, ein I oder ein D Regler, wobei D-Regler
eigentlich nicht existieren.
Schau mal das hier: https://www.youtube.com/watch?v=dPkFMeiUni4 War auch mein Einstieg in die Regelungstechnik.
Third E. schrieb: > Die Stellgröße muss um den Faktor 30/20=1,5 > erhöht werden Das ist nicht die richtige Art eines P-Reglers: der P-Faktor, mit dem die Regelabweichung(!) multipliziert wird, sollte einstellbar sein - das ist auch die einzige Stellschraube, an der man bei einem P-Regler drehen kann. Die bleibende Regelabweichung und die Stabilität hängen davon ab. Es ist übrigens egal, ob die Regelabweichung von einem neuen Sollwert oder einer geänderten Belastung verursacht wird, das "weiss" der Regler garnicht. Natürlich ist es besser, gleich einen PID-Regler zu programmieren, man kann ja den I- und D-Faktor immer noch auf Null stellen, wenn man mit dem P-Verhalten schon zufrieden ist. Georg
meiner Meinung nach baust Du einen Regler mit einem feed-forward zweig. Im Prinzip eine Steuerung und darauf eine Störgrössen Regelung
Third E. schrieb: > Ich habe das mal im Excel getestet, funktioniert. Aber > was ist das für eine Art von Regler? Irgendwas Nichtlineares :) Du bildest Quotienten von variablen Größen, und das sprengt den Rahmen der klassischen linearen Systemtheorie. Dort sind nur Plus, Minus und konstante Faktoren erlaubt. (Integrale und Ableitungen natürlich auch noch.) > Welche Nachteile hätte diese Art von Regler? Das Zeitverhalten ist unklar. Der Motor reagiert nicht unendlich schnell; man muss verhindern, dass der Regler immer weiter aufdreht.
Guck mal hierhin auf Seite 30 https://www.samson.de/pdf_de/l102de.pdf Du mußt einen sog. Offset auf die Stellgröße addieren. mfG Paul
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.