Hallo und guten Abend, ich möchte ein RC-Modell ohne Fernbedienung steuern und auf "Spur" halten. Das Modell soll zwei Betriebsmöglichkeiten haben: 1. einem Randstein in einem gewissen Abstand folgen 2. zwischen zwei Randsteinen (links und rechts) mittig fahren Das beschreibt es schon ziemlich treffend. Im Modus 1 gibt es nur einen Randstein auf einer Seite und der (einstellbare) Abstand wird gehalten, auch wenn es um eine leichte Kurve (keine 90°) geht, Modus 2 mittelt das Modell zwischen zwei Randsteinen wobei die Fahrbahnbreite variiert zwischen 1,50m und 10m Die Geschwindigkeit soll übrigens konstant (einstellbar) sein. Wobei die Geschwindigkeit nicht hoch sein muss. 10km/h genügen durchaus. Als Sensoren scheider Licht vermutlich nahezu aus, weil man nicht weiß, wie gut oder schlecht so ein Randstein reflektiert. Ultraschall wäre eine Möglichkeit, allerdings ist die Frage, ob das stabil sein wird. Habt ihr Ideen wie ich das angehen könnte? Gespannte Grüße
Michael S. schrieb: > ich möchte ein RC-Modell ohne Fernbedienung steuern und auf "Spur" > halten. Was ist an einem RC-Model ohne Fernbedienung noch RC? (RC = Radio controlled)
Michael S. schrieb: > Als Sensoren scheider Licht vermutlich nahezu aus, weil man nicht weiß, > wie gut oder schlecht so ein Randstein reflektiert. Wenn du die Stärke der Reflektion misst, schon. Andererseits eignet sich ein Randstein hervorragend für die IR Sensoren von Sharp, die per Triangulation messen. Ultraschall ist bei 10 km/h noch problemlos möglich, da solltest du auch recht gute Ergebnisse erzielen. Das Problem ist hier aber, dass Ultraschall einen recht breiten Abstrahlwinkel hat und du so nicht mehr unbedingt den Bordstein, sondern die Straße davor misst.
Wenn man halbwegs schnell fahren will, muss man den Randstein schon vor dem Auto erfassen. Eine simple Lösung ist ein Gerüst, das ein paar Meter nach vorne und zur Seite auslegt und die Sensoren trägt, die nicht so weit kommen, beispielsweise Sharp PSD Entfernungsmesser, Ultraschall oder Radar.
Ohne Plan B würde ich das nicht machen. Ultraschall geht, wenn Du den Strahlemann nicht senkrecht montierst, sondern etwas (abhängig vom Abstrahlwinkel) schräg nach oben und sinnvollerweise etwas nach vorn geneigt. Aber denk dran, in 10 m Entfernung kommt eine Ein-/Ausfahrt, und da ist Dein Bordstein abgesenkt;-) Also nix mit durchgehender Flanke. Gilt aber für Laser, Radar und sogar für eine Tastrolle ebenfalls.
qwertzuiopü+ schrieb: > Das Problem ist hier aber, dass > Ultraschall einen recht breiten Abstrahlwinkel hat und du so nicht mehr > unbedingt den Bordstein, sondern die Straße davor misst. Sofern die Rauhigkeit der Straße sich in üblichen Grenzen bewegt und das Reflektionsgesetz nicht außer Kraft gesetzt wurde, gehen die Reflektionen von der Straße bestimmt nicht zum Sender zurück.
Hallo und guten Morgen, danke euch zunächst für die Ideen. Ich vermute mit den Sharp-Sensoren meint ihr diese hier: http://www.exp-tech.de/sharp-gp2y0a02yk0f-entfernungssensor-analog-20-150cm Richtig?
Wolfgang schrieb: > Was ist an einem RC-Model ohne Fernbedienung noch RC? > (RC = Radio controlled) Meeensch: Randstein controlled ! Gruß Jobst
Ich habe sowas ähnliches an der Hochschule im Rahmen des NXP Cups mit einer Line-Scan Kamera gemacht. Nur folgt das Auto hier nicht der Bordsteinkante sondern bleibt innerhalb einer Bahn aus schwarzen Linien. Kannst dir ja mal anschauen, ob dir das was hilft.
Wolfgang schrieb: > Michael S. schrieb: >> ich möchte ein RC-Modell ohne Fernbedienung steuern und auf "Spur" >> halten. > > Was ist an einem RC-Model ohne Fernbedienung noch RC? > (RC = Radio controlled) gehobene Kybernetik :) StromTuner
So, ich habe jetzt mal zwei von den Sharp-Sensoren, einen PI Zero, ein Ultraschall-Modul und einen Picon Zero bestellt. Mal schauen, ob da schon was brauchbares rauskommt. Danke für eure Tips bisher!
Hallo und guten Abend,
nachdem das im September letzten Jahres beschriebene Projekt zunächst
einige Zeit aus Eis gelegen hatte ist es nun nicht zuletzt aufgrund
eurer Ratschläge ein kleines bisschen fortgeschritten.
Im Moment bin ich jedoch an einem Punkt an dem ich nicht zuviel Zeit ins
"selber erfinden" stecken möchte, ich will das Rad nicht neu erfinden,
vielleicht habt ihr mir ja nochmal ein paar Ratschläge für mich.
Also wie ist der Stand:
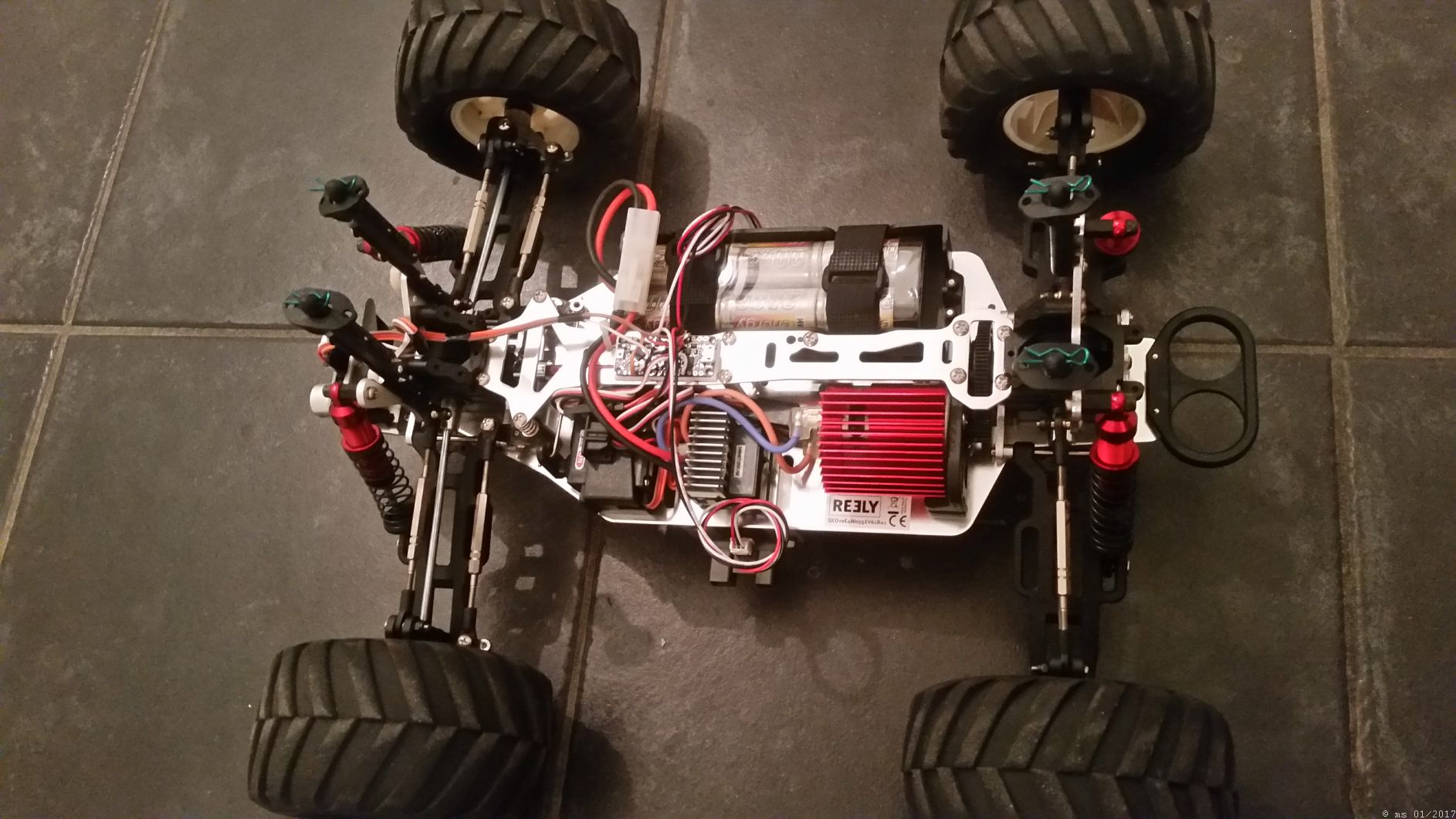
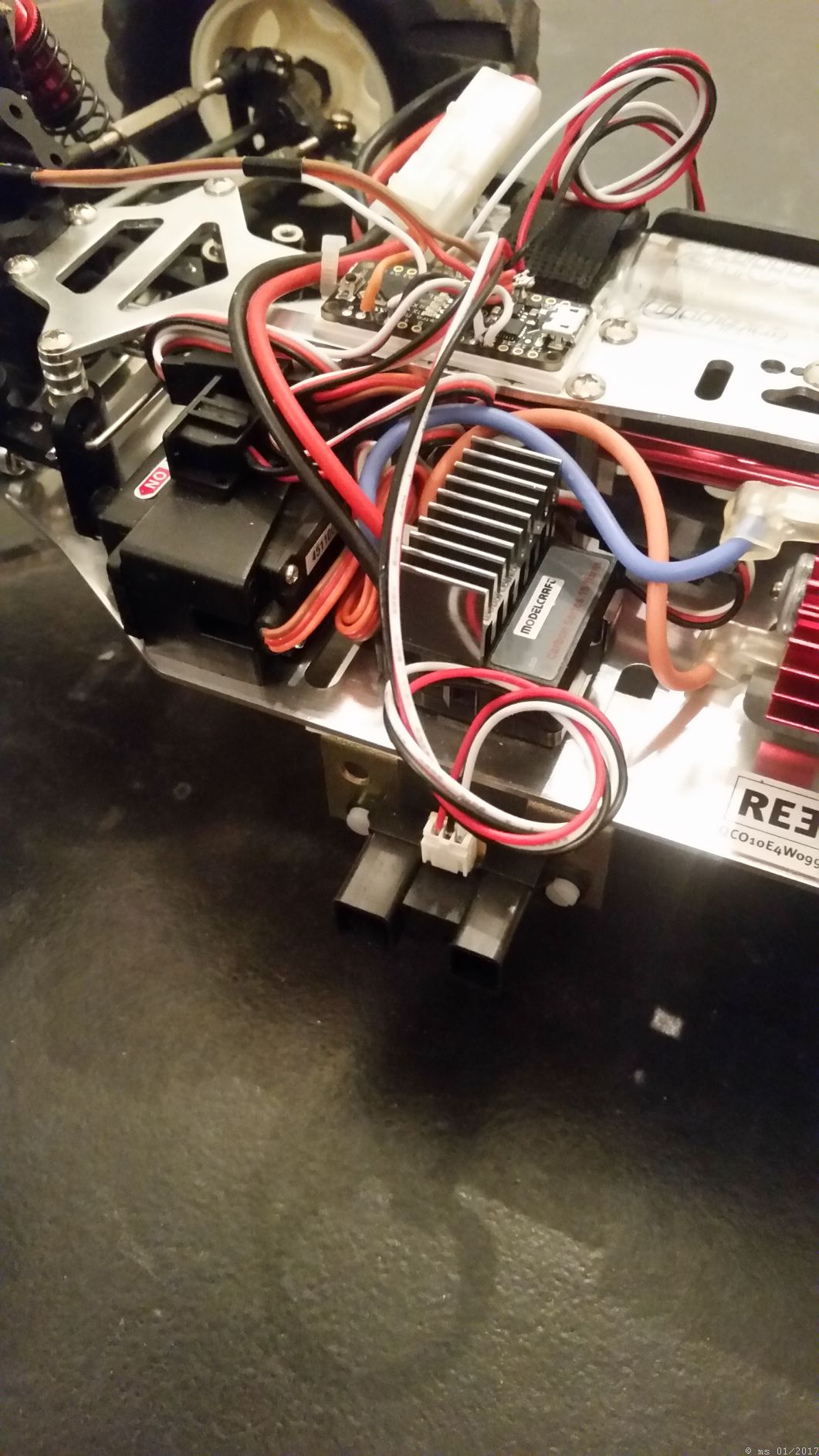
Modellauto, Maßstab 1:10 mit stabiler Aluplatte verwendet
Empfänger entfernt, stattdessen einen Adafruit Metro Mini verbaut
Fahrtregler macht BEC - funktioniert gut
Links und rechts jeweils ein Sharp GP2Y0A02YK0F (20-150cm) verbaut
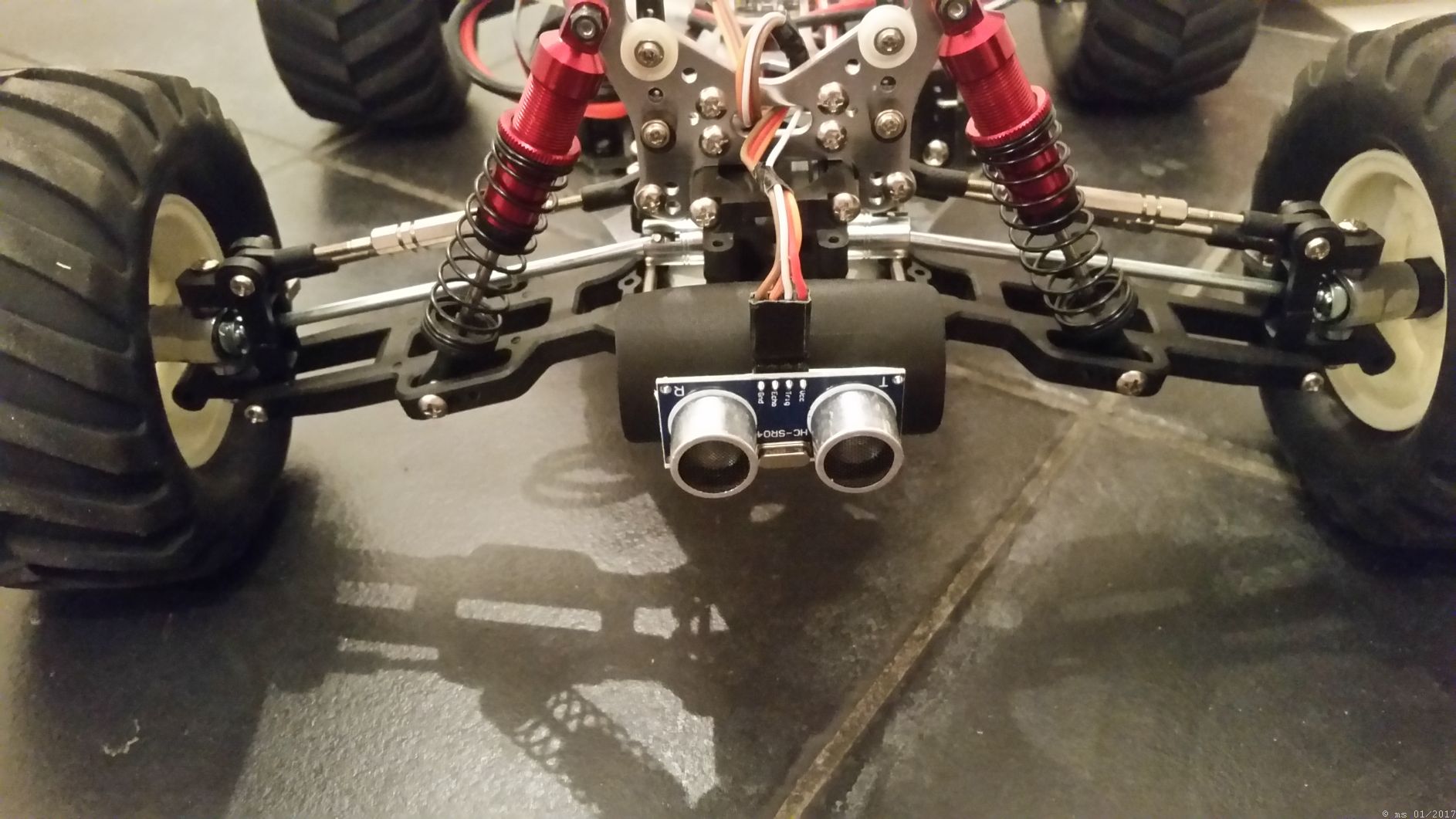
Vorne ein HC-SR04 Ultraschall-Sensor verbaut (für STOP)
Den Metro Mini habe ich mit der Arduino IDE programmiert.
Ich kann erfolgreich und zuverlässig alle Sensoren einlesen und die
Servos sowohl für die Lenkung als auch fürs Gas steuern.
Was auch einigermassen funktioniert ist mein ursprünglich als "2."
beschriebener Fahrmodus ("zwischen zwei Randsteinen (links und rechts)
mittig fahren"). Getestet in der Wohnung im Flur.
Probleme habe ich nun mit der Regelung, wie von Sebastian vorhergesehen:
Sebastian S. schrieb:
> Aber denk dran, in 10 m Entfernung kommt eine Ein-/Ausfahrt, und da ist
> Dein Bordstein abgesenkt;-)
> Also nix mit durchgehender Flanke. Gilt aber für Laser, Radar und sogar
> für eine Tastrolle ebenfalls.
Hat jemand soetwas schonmal realisiert und Tips für mich wie eine
vernünftige Lenkung-/Gas-Regelung hier aussehen könnte?
Wie schafft man zum Beispiel den Übergang von Modus "2" (mittig fahren)
zu Modus "1" (Randstein folgen) wenn die Übergänge nicht eindeutig sind?
Mein Hauptproblem ist also die Regelung der Lenkung abhängig von
Störgrössen ...
Wäre euch für Tips aller Art dankbar!
Einen schönen Abend
Es gibt viele Ansätze, die man testen kann. Für einige allerdings
brauchts extra Hardware.
1. Nichts tun und geradeaus weiterfahren, bis wieder ein Merkmal
auftaucht, das eindeutig von den vorhandenen Sensoren erkannt wird,
evtl. ein wenig abbremsen, um nicht überrascht zu werden :-)
Einführung weiterer Sensoren:
2. Z.B. ein Gyro (Kreiselkompass), der dir unabhängig von den anderen
Sensoren die Fahrtrichtung auswirft. Gyros, die man sich leisten kann,
driften allerdings recht schnell ab, so das man nicht unbegrenzt lange
noch dessen Signal die Richtung halten kann. Navis in Autos benutzen
sowas ab und zu, wenn das GPS Signal ausfällt (Tunnel) um trotzdem
einigermassen die Fahrtrichtung zu erfassen.
3. Kompasssensor ist gut, allerdings in der Nähe von Fe-Metall und vor
allem Magnetfeldern nicht unbedingt genau. An einem langen Ausleger kann
sowas aber funktionieren und ist nicht so teuer.
4. GPS ist auch gut, funktioniert allerdings zuverlässig nur unter
freiem Himmel. Es gibt GPS Receiver, die Geschwindigkeit und
Kompassdaten liefern ('$GPVTG' Daten), die allerdings nur dann
funktionieren, wenn das Fahrzeug sich bewegt. Im Stillstand gibts nur
Länge und Breite des derzeitigen Standortes.
Hi Schön, daß Du nicht aufgegeben hast! Das Problem wird sein, daß 'plötzlich' der eine Randstein weg ist und somit nicht mehr 'Mittig' gefahren wird. Denke, Dein Auto schlägt einen Hasenhaken in die offene Richtung und fährt dann im Kreis? Leider habe ich keine Lösung dafür - vll. kannst Du bei plötzlichem Verschwinden der Bezugskannte mit dem noch 'funktionierendem' Sensor auf Modus 1 umschalten. Bei sich 'nur entfernendem' Bordstein musst Du natürlich wieder zur Mitte fahren - wie machst Du Das, damit Du hier nicht in eine Kreisbahn gerätst? MfG
Matthias S. schrieb: > Nichts tun und geradeaus weiterfahren Natürlich nicht geradeaus, sondern mit dem vorhandenen Lenkwinkel.
Matthias S. schrieb: > Matthias S. schrieb: >> Nichts tun und geradeaus weiterfahren > > Natürlich nicht geradeaus, sondern mit dem vorhandenen Lenkwinkel. Geht leider nicht sonst passiert genau das: Patrick J. schrieb: > Denke, Dein Auto schlägt einen Hasenhaken in die offene Richtung und > fährt dann im Kreis? Erklärung: Ich fahre in Modus "2", das eine Signal bricht mehr oder weniger plötzlich weg. Ich lenke also in diese Richtung, schlage also ein. Wenn ich in Modus "1" wechseln würde dürfte ich nicht eingeschlagen bleiben sondern müsste auf die ursprüngliche Bahn zurück - nur wie!?
Dem nach je, wo Du wohnst, ist es üblich den Randstein alle Naslang für Ein- oder Zweifahrten abzusenken. Für Ultraschall und Laser bedeutet das: Ein paar Meter Nirwana - oder war's doch 'ne Straße, die dummerweise gerade hier abzweigt?
Michael S. schrieb: > Ich fahre in Modus "2", das eine Signal bricht mehr oder weniger > plötzlich weg. Ich lenke also in diese Richtung, schlage also ein. Wenn > ich in Modus "1" wechseln würde dürfte ich nicht eingeschlagen bleiben > sondern müsste auf die ursprüngliche Bahn zurück - nur wie!? Du musst davon ausgehen, das Strassen im allgemeinen keine Haken schlagen (es sei denn, du wohnt in San Francisco), und laufend den 'Trend' der Strasse mitloggen. Wenn ein Artefakt, also ein sich plötzlich ändernder Sensorwert, gemessen wird, sollte deine Trenderkennung das prüfen und plötzliche Lenkeinschläge verhindern, stattdessen gemächlich reagieren. Sowas kann man mit laufender Mittelwertbildung und z.B. einer PI Regelung probieren. Die aufwendige Lösung ist z.B. GPS mit Onboard Kartenmaterial - aber das überfordert die kleine Kiste im Moment.
Danke für die bisherigen Antworten. Ein wichtiger Hinweis: GPS ist keine Option, das Modell soll nachher (meist) in einem Tunnel ohne Empfang fahren. Das mit der Aufzeichnung und dem "gemächlich reagieren" das hatte ich mir auch schon überlegt. Das wird ein erster Ansatz sein den ich probiere ...
Michael S. schrieb: > GPS ist keine Option, das Modell soll nachher (meist) in einem Tunnel > ohne Empfang fahren. Tunnel = Rohr ?
Michel M. schrieb: > Michael S. schrieb: >> GPS ist keine Option, das Modell soll nachher (meist) in einem Tunnel >> ohne Empfang fahren. > > Tunnel = Rohr ? Nein, Tunnel = Tunnel mit einer Fahrspur und richtigen Bordsteinen (aber leider auch so Geschwindigkeits-Dämpfungshindernissen, da gibts dann wenn man drüber fährt kurz auf keiner Seite mehr einen Bordstein - auch schwierig).
Sowas gab es mal vor einigen Jahren auf der Cebit zu sehen: Da hatten Studenten ein Modellauto mit Ultraschallsensoren und Signalverarbeitung (Abstandsregeleung zur Wand) ausgestattet und sind mit ca. 80km/h durch einen Rundkurs gebrettert.Das war zu Zeiten, als Fuzzylogic das Nonplusultra war... Wie MaWin schon schrieb muss man "in die Zukunft sehen". Anders arbeiten Navis fürs Auto doch auch nicht.
Ersten Tipp : Lass die Sharp Sensoren schrag nach forn sehen ! Das erleichert die Regelung um eine Abstand zu halten. Grund : wen er Senkrecht montiert ist, wird hasst du eine vergrosserung von Abstand beim Richtingsaenderung nach die Bordstein zu!!. Zweites : Sie kennen wahrscheinlich die maximale Bochtradius von Traject, damit soll auch ihre maximale Lenkung begrenzt werden auf diese Radius + 30% Drittes : Beim verlieren von Sharp-signal (kein Bordstein mehr) soll erst nach eine Bestimmer verzogerung auf die ein-seite regelung umgeschaltet werden. Fiertes : Eine encoder auf die Antrieb gibt wertfolle info ueber der abgelegte Abstand, daneben können sie auch eine perfecte Geschwindigkeits regelung machen.
Michael S. schrieb: > Wie schafft man zum Beispiel den Übergang von Modus "2" (mittig fahren) > zu Modus "1" (Randstein folgen) wenn die Übergänge nicht eindeutig sind? > > Mein Hauptproblem ist also die Regelung der Lenkung abhängig von > Störgrössen ... Beide Abstände erfassen, Güte des Signals bestimmen und nach dem besseren richten, solange die Güte des besseren Signals eine bestimmten Schwelle nicht unterschreitet. Falls kurzzeitig beide Signale zu schlecht sind, ruhig weiter fahren und drauf vertrauen, dass die Welt weiter geht, bei zu langem Ausfall in Safe-Mode gehen und um Hilfe rufen.
Michael S. schrieb: > Hallo und guten Abend, Schönes Projekt, interessante SW-Navigationsaufgaben! Sei kreativ dabei & viel Glück u. Erfolg! Ev. Re/Li erstmal nach Modus 1 rechnen (konst. Abstand v. Randstein) und "bewerten". Wenn beide Seiten "gleich gut" sind, den Wert f. Randabstand anpassen. So wird Modus 2 (mittig) "bloss" zu einem Sonderfall von 1, muss aber nicht echt separat modelliert werden. Fällt Re oder Li aus: beim letzten Wert f. Randabstand bleiben. Ev. hilft es, bei Ausbleiben einer Seite, die "gute" einfach spiegeln und damit mit 2 Seiten weiterrechnen. Als ob die Strassenbreite wie eine AM-Hüllkurve (Frauenfigur ;-) aussähe. NB: die Vorderreifen noch drehen, das Profil dreht falsch rum. Dieses "Pflugprofil" (Traktorenreifen) ist so gedacht dass es sich den Weg in den Matsch gräbt, bis es auf "harten" Grund kommt. So wurde es mir erklärt... (wirkt m.M.n. aber nur auf Felder mit Humusschicht, Habitat von Traktoren. Das ist also kein AllTerain -Profil und passt somit auch nicht auf Ballonreifen)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.