Hi! Ich plane ein Projekt und hätte diesbezüglich gerne eure Meinungen. Ich habe aus einem Quadrokopter die Hauptplatine ausgebaut und würde gerne den Lageregelungssensor auslesen (1) Dann möchte ich die 4 Motoren des Quadrokopters mit Servo-Motoren austauschen um je nach Lage eine gewisse Auslenkung zu erzielen. Ich habe dazu noch einen Arduino zur Verfügung. Ziel ist es ein Modell für eine aerodynamische Raketensteuerung zu bauen, ähnlich wie hier : https://www.youtube.com/watch?v=swjb5wQ1JXU Ich würde mich sehr über hilfreiche Beiträge & Infos freuen!
Felix schrieb: > Ich würde mich sehr über hilfreiche Beiträge & Infos freuen! Erstmal sollten von dir Infos kommen, was da auf deine Hauptplatine drauf ist und ob du die Software dazu auch als Quellcode hast. IMHO wäre es allerdings einfacher, sich eine IMU zu holen und das ganze selbst aufzubauen. Was versprichst du dir von der Quadkopterplatine für Vorteile?
Angehängte Dateien:
-

20161006_225638.jpg
240 KB
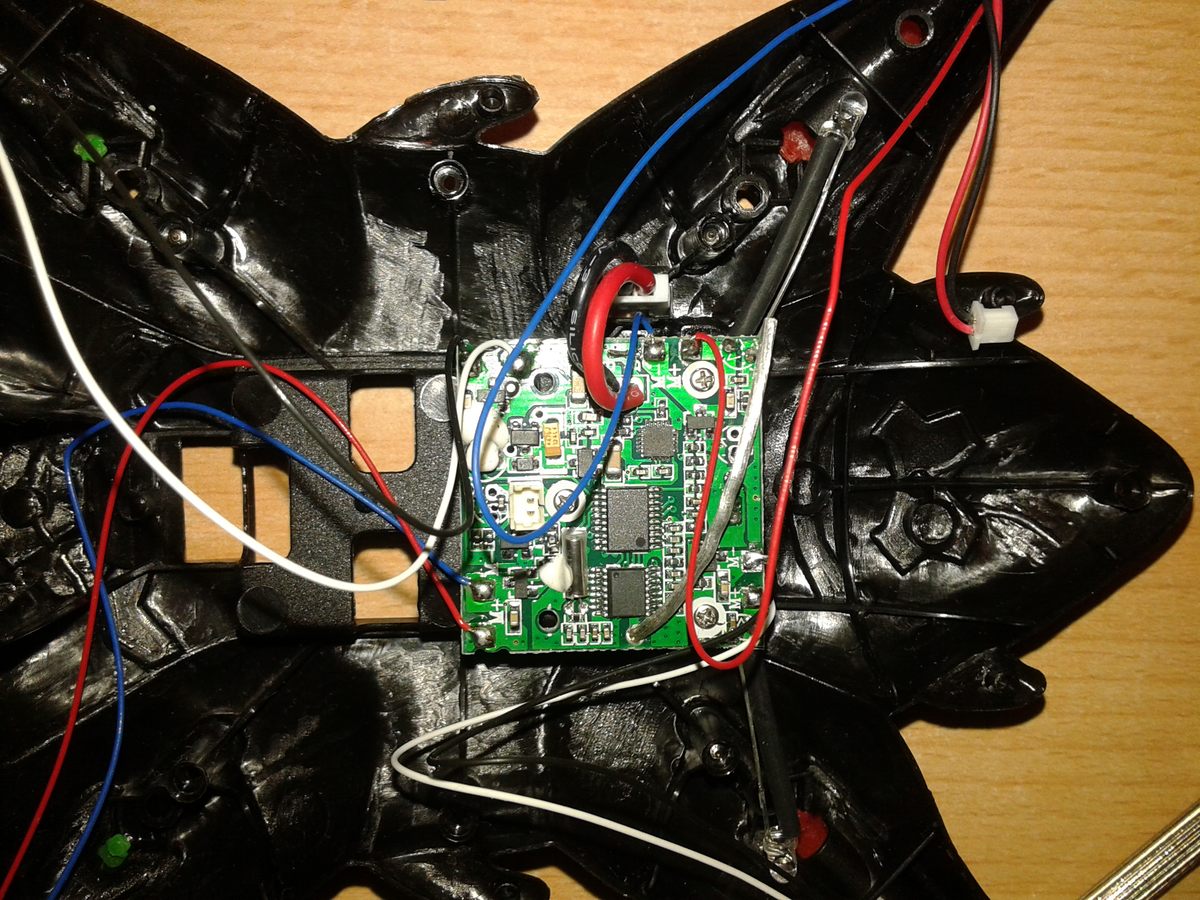
Ich erhoffe mir dadurch einfach nur etwas Erfahrung und Spaß an der Sache, wobei es natürlich einfacher wäre eine Einheit zu kaufen und damit zu arbeiten. Im Anhang befindet sich ein Foto der Platine
Wolfgang schrieb: > Erstmal sollten von dir Infos kommen, was da auf deine Hauptplatine > drauf ist und ob du die Software dazu auch als Quellcode hast. Ich habe ein Foto der Platine hochgeladen, aber den Quellcode habe ich leider nciht
Felix schrieb: > Ich habe ein Foto der Platine hochgeladen, ... Liegt das an der Beleuchtung oder steht auf den ICs wirklich nichts drauf? Ich kann da keinerlei Typenbezeichnungen erkennen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.