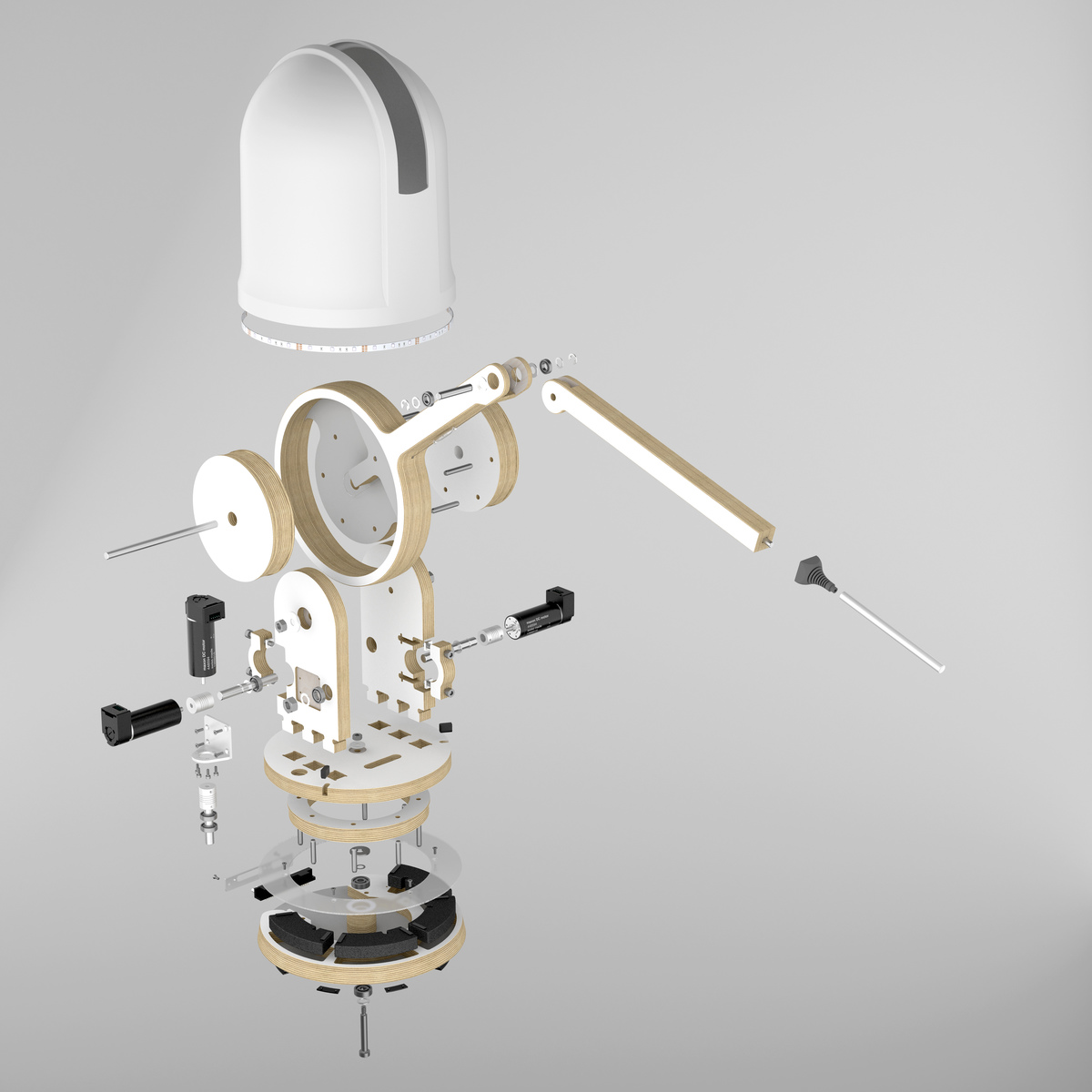
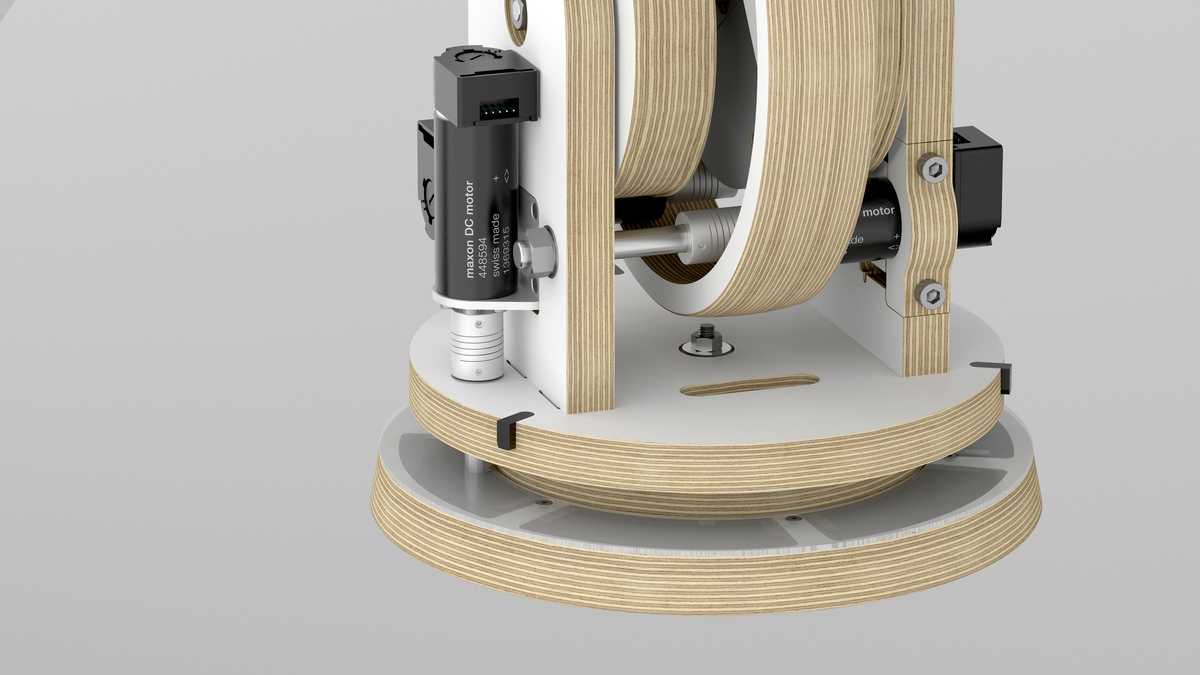
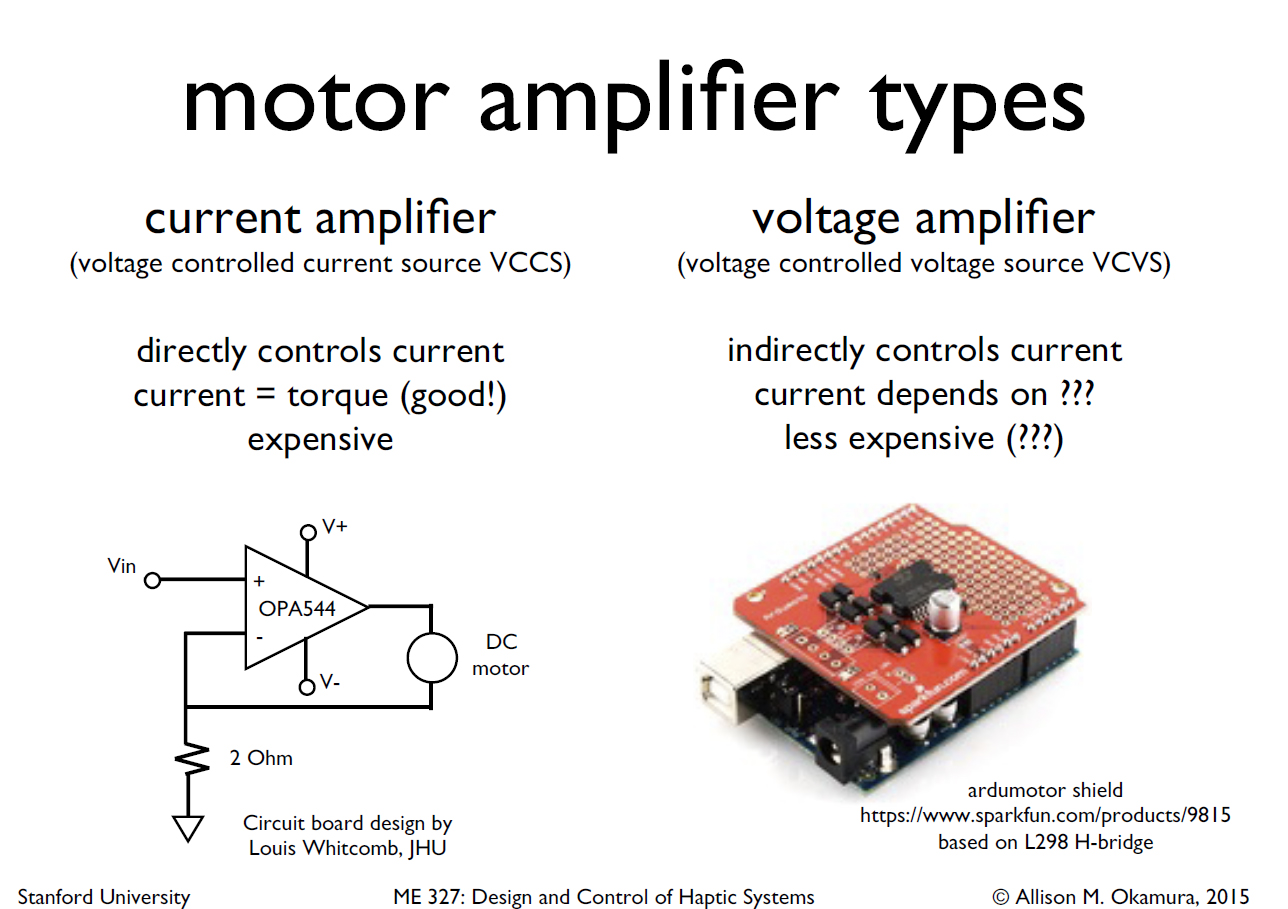

Hallo zusammen, ich studiere Industrial Design und forsche im Bereich kinästhetische Haptik in virutellen Welten. Ein erstes Einachsiges Gerät habe ich schon erfolgreich umgesetzt - Anhang 4 Dazu habe ich nun ein 3-Achs Eingabegerät mit haptischem Feedback entworfen - Anhang 1 & 2 - basierend auf dem Konzept von woodenhaptics.org Bei Woodenhaptics setzt man auf die Maxon ESCON Controller. Kurz die Eckdaten des Motors - ich setze Maxon RE35 30V Motoren ein. http://bdml.stanford.edu/twiki/pub/Haptics/PhotonicRobots/RE35-MaxonMotor.pdf Nun meine Frage- gibt es günstigere Alternativen (<100€) zu den "Maxon ESCON" für DC-Motortreiber mit Stromregler? Theoretisch könnte man ja auch mit einem konventionellen DC-Treiber über einen Stromsensor Softwareseitig die Spannung nachregeln um einen konstanten Strom zu erhalten? Noch eine Grundlagenfrage: Bisher habe ich die Motoren normal über Spannung gesteuert. Inwiefern steht die Strom-Kraft Konstante in Bezug zur Spannung? Ich konnte bisher das gewünschte haptische Feedback auch mittels Spannungs-Regelung erzielen. Leider konnte mir den Unterschied bisher weder der Initiator von Woodenhaptics noch führenden die Leute aus Stanford nicht richtig vermitteln warum Stromregler den Spannungsreglern überlegen sein sollen. - Anhang 3 Vielen Dank für eure Antworten =) Friedrich
Angehängte Dateien:
-

S29.jpg
190 KB -

S30.jpg
200 KB -

Stanford-Drivers.jpg
470 KB -

Intro_text.jpg
230 KB
Friedrich schrieb: > Nun meine Frage- gibt es günstigere Alternativen (<100€) zu den "Maxon > ESCON" für DC-Motortreiber mit Stromregler? Als Alternative könnte das passen: l6203, l6205N Dip (hier würde ich die Ausgänge brücken). Den habe ich momentan hier rumliegen: http://www.ebay.de/itm/201445816686?_trksid=p2060353.m1438.l2649&ssPageName=STRK%3AMEBIDX%3AIT Ich komme nicht dazu diesen zu testen. Was sehr gut zu sein scheint ist, dass hier ein OPV mit Messshunt verbaut ist (obwohl dieser vom Design her Kilometer weit entfernt ist) + Generatorspannung sollte man messen können. Glockenankermotoren haben eine sehr geringe Induktivität. Dabei musst du mit der PWM sehr hoch gehen. Ein Oszi hilft dir dabei. Maxon hat auch eine Formelsammlung, die dir hilft. > Theoretisch könnte man ja auch mit einem konventionellen DC-Treiber über > einen Stromsensor Softwareseitig die Spannung nachregeln um einen > konstanten Strom zu erhalten? Ja, sowas nennt man eine Lastregelung. Der Zug fährt durch Berg und Tal mit der Konstanten Geschwindigkeit. > Noch eine Grundlagenfrage: Bisher habe ich die Motoren normal über > Spannung gesteuert. Inwiefern steht die Strom-Kraft Konstante in Bezug > zur Spannung? Male ein Ersatzschaltbild eines Gleichstrommotors, dann kannst du dir Frage auch selbst beantworten. Und zum Schluß sei noch gesagt, DC Motoren brauchen eine gewisse Spannung, damit ein Magnetfeld im Motor aufgebaut wird... Beim bei einer Regelung wird man das ganz schnell merken, da die Endposition nicht immer korrekt angefahren wird. Mit Kaskadenregelung, Zustandsregelung mit Beobachter und Co kriegt man alles in Griff. Bitte.
Friedrich schrieb: > warum Stromregler den Spannungsreglern überlegen sein sollen. Du stellst die falsche Frage ;) Die Maxon RE35 sind Servomotoren. Hinten am Motor sitzt ein Encoder der die tatsächliche Position erfasst. Im Servoregler wird hauptsächlich auf die Position geregelt (Schleppfehler), Strom & Spannung sind dabei nur Mittel zum Zweck. Ohne Encoder funktioniert das nicht, du bekommst dann überhaupt nicht raus ob jemand die Achse bewegt bzw. wo deine Position im Raum momentan ist. Ein simpler Servoregler wäre sowas: Schleppfehler -> PID Regler -> PWM Tastgrad Der Strom wird dabei nicht geregelt, bzw. nur als Grenzwert
Ja den L6201/3 hatte ich mir schon rausgesucht - das ist soweit die erste Wahl wenn ich kein Board mit integriertem Current-Loop finde. Im Moment habe ich für die Ein-Achs-Anwendung einen VNH2SP30, beim Kauf aber übersehen Supply Voltage ≠ Operating Voltage^^ Das einzige was ich dazu bisher fand war der hier Sanken STA6940 - https://www.semicon.sanken-ele.co.jp/sk_content/sta6940m_ds_en.pdf Soweit ich das aus den Erklärungen zum Ersatzschaltbild verstanden haben treten bei einer Drehzahländerung dann Abweichungen zwischen Nennspannung und Gegenspannung auf die eine Nichtlinearität vom Motorstrom darstellen? Jedoch nur solang bis der Controller die Nennspannung anpasst. Solange das also in > 1000Hz (menschliche Wahrnehmung für kinästhetische Haptik) passiert ist alles gut. Ein 2000er Encoder ist dran, sonst wüsste das System ja nie wo im 3D Raum sich der Eingabestift befindet. Das mit der Positionsregelung verstehe ich nicht. Ich will ja keine Position (z.B. wie klassisch bei CNC Anwendungen für Servomotoren) anfahren, sondern eine Kraft an verschiedenen Positionen simulieren. Bei der Simulation einer Feder z.B. muss die Position nicht korrgiert werden sondern nur die Kraft abhängig der Position angepasst werden. Wobei man den Strom natürlich auch über einen PID Kreis regeln könnte.. Hier sieht man das Einachsige in Aktion: https://www.youtube.com/watch?v=NlaF00GmT28
Ja, was mir auch aufgefallen ist, dass dieser Motor ohne Getriebe eventuell schnell heiß läuft. 110mN ist bei solchen Hebel nicht viel. Rechnen musst du selber. Ich denke mal, dass du nicht mehr wie 100rmp brauchst... Auch wenn dieser Motor 30V Nennspannung hat, kann es sein, dass du mit 12V und Getriebe auch klar kommst. Das rentiert sich aber nicht, da du schon teuer für den Motor bezahlt hast.
Ein Getriebe habe ich zwar nicht dafür aber die Übersetzung mit einem Capstan-Antrieb (die Stahldrähte fehlen im Rendering) so dass am Ende etwa 3N-6N Kraft in der Vertikalen übrig bleiben, was für die Anwendung aber auch voll ausreicht. Normale Planetengetriebe und Co fallen da leider raus, da diese einen viel zu hohen Reibungsverlust haben - wenn man sich im virtuellen Raum "bewegt" will man ja nicht das Gefühl haben seine Hand durch Pudding zu ziehen^^ Das mit der Temperatur ist aber trotzdessen ein guter Punkt, werde ich bei meinem ersten Aufbau bedenken und nachmessen. Habe mir jetzt mal ein paar L6205 (2€) bestellt, parallel betrieben kann der bis zu 5,8A RMS - das kann mit den Maxon-Treibern schon gut mithalten. Die Stromregelung und das Auslesen der Encoder via Interrupts werde ich über einen STM32F103 (2,5€) machen. Der wird dann als HID über USB verbunden und schickt die Position und bekommt die Rückmeldung über die auszuübende Kraft =) Interessant dass es für diese noch keine Robotik-freundliche Breakout-Boards hat..
Friedrich schrieb: > Habe mir jetzt mal ein paar L6205 (2€) bestellt, parallel betrieben kann > der bis zu 5,8A RMS - das kann mit den Maxon-Treibern schon gut > mithalten. Die Stromregelung und das Auslesen der Encoder via Interrupts > werde ich über einen STM32F103 (2,5€) machen. Der wird dann als HID über > USB verbunden und schickt die Position und bekommt die Rückmeldung über > die auszuübende Kraft =) 5,8A RMS aber nur mit aktiver Kühlung. Das sind immer solche Traumzahlen der Hersteller. Ich würde darauf kein Pfenning setzen. Lies einfach das Datanblatt, dann siehst du wieviel Verlustleistung ohne passiven Kühler abgeführt werden kann. Vorallem ist die OCP ganz wichtig in deinen Fall, da der Maxon über 24A ziehen kann. Natürlich kann dies auch das Labornetzteil erledigen.
@aSma Danke für den Hinweis, werde mal sehen wie weit man mit denen kommt. Ansonsten scheint es aber auch nichts stärkeres im IC Bereich zu geben? Dannach kommen dann wohl externe Mosfets - da schaut der Infineon BTN8982 als Eval-Board ganz schick aus. Mit 40V und 50A auf jeden Fall genügend Reserve. Den Lastenregler werde ich mir dann wohl selber bauen wenns da keine IC's für gibt die das besser machen?
Servus, Suche nach dedizierten Halbbrückentreiber. Die gibt es auch als Dip. https://www.mikrocontroller.net/articles/Motoransteuerung_mit_PWM#H-Br.C3.BCcke.2C_4-Quadrantensteller Ich vermute aber L6205 gebrückt wird dir reichen. Du brauchst ja nur kurzzeitig ein Moment und nicht dauerhaft wie bei einer CNC. > Den Lastenregler werde ich mir dann wohl selber bauen wenns da keine > IC's für gibt die das besser machen? Du brauchst einen Messshunt um den Strom zu messen um das Drehmoment wie gewünscht zu regeln. Dazu entweder einen fertigen Hallsensor oder Shunt mit OPV kaufen (bzw. google: current sensor 5A). Wie hast du den die Explosionszeichnung mit Multiplex erstellt? Geht das mit Solidworks?
Das klingt ja schonmal gut :) Hallsensor (ACS712) habe ich schon da- haben die gegenüber Shunts irgendwelche Nachteile? Die Explosionsdarstellung ist schon fortgeschrittene Visualisierung mit VRay - https://www.chaosgroup.com/gallery Das ist zwar schick man braucht aber 3ds max und es dauert seine Zeit - so 1-2Tage wenn man das Modell schon hat. Keyshot geht auch, dazu musst du aber die Oberflächen vorher abtrennen mit Offset=0 oder Split Mit Solidworks wirst du die Qualität nicht erreichen, du kannst aber wenn du die PhotoView 360 Erweiterung hast auch Rendern. Da kannst du dann ein Material anlegen und das einzelnen Flächen zuweisen. Oder einfach unter Darstellung/Erscheinung ein neues Material anlegen, das Mapping anpassen und dann ein Screenshot machen. Wie das generell geht findest du hier: https://www.youtube.com/watch?v=lb7pXF35Ies Wenn du die Multiplex-Textur willst, schick mir eine Mail an friedrichjux@onlinehome.de
Friedrich schrieb: > Hallsensor (ACS712) habe ich schon da- haben die gegenüber Shunts > irgendwelche Nachteile? Messshunts müssen low induktiv sein (metall film). Jeweils pro Amp nehme ich 1ohm 1% parallel. Mit einen ADC 12 bit reicht mir die Auflösung oftmals auch aus.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.