hallo,
am alex student in germany.
am working now (MAtlab/simulink) on a project: FOC (field oriented
control) of BLDC with the STM32f4 discovery board and a boostxl pack.
i have allready done the SVPWM.
and the problem now is the FOC: it didn´t work.
am using an 'inkremental' encoder for the relativ position. that give me
the mechanical angle und i had transfort it to electrical angle.
i have also using ADC of the stm32f4 phasis current.
Problem:
1) i need the absolut rotation
2) i have to give the absolut angle to my FOC.
-> i dont know how it's working
Angehängte Dateien:
-

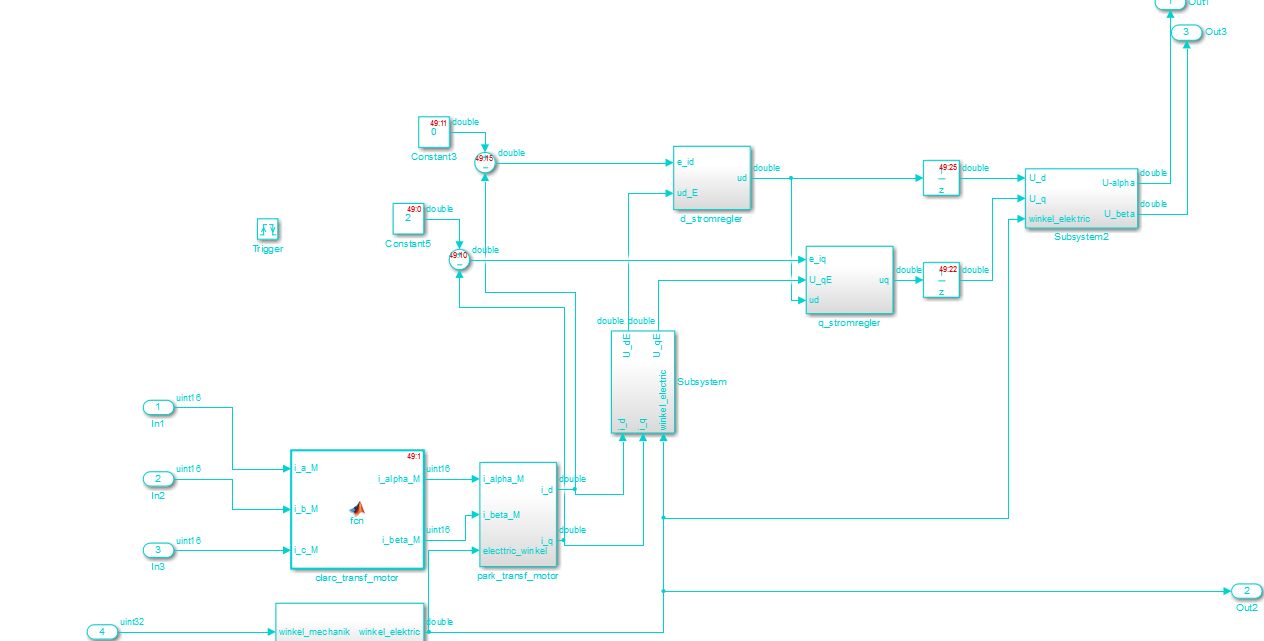
foc.PNG
45 KB -

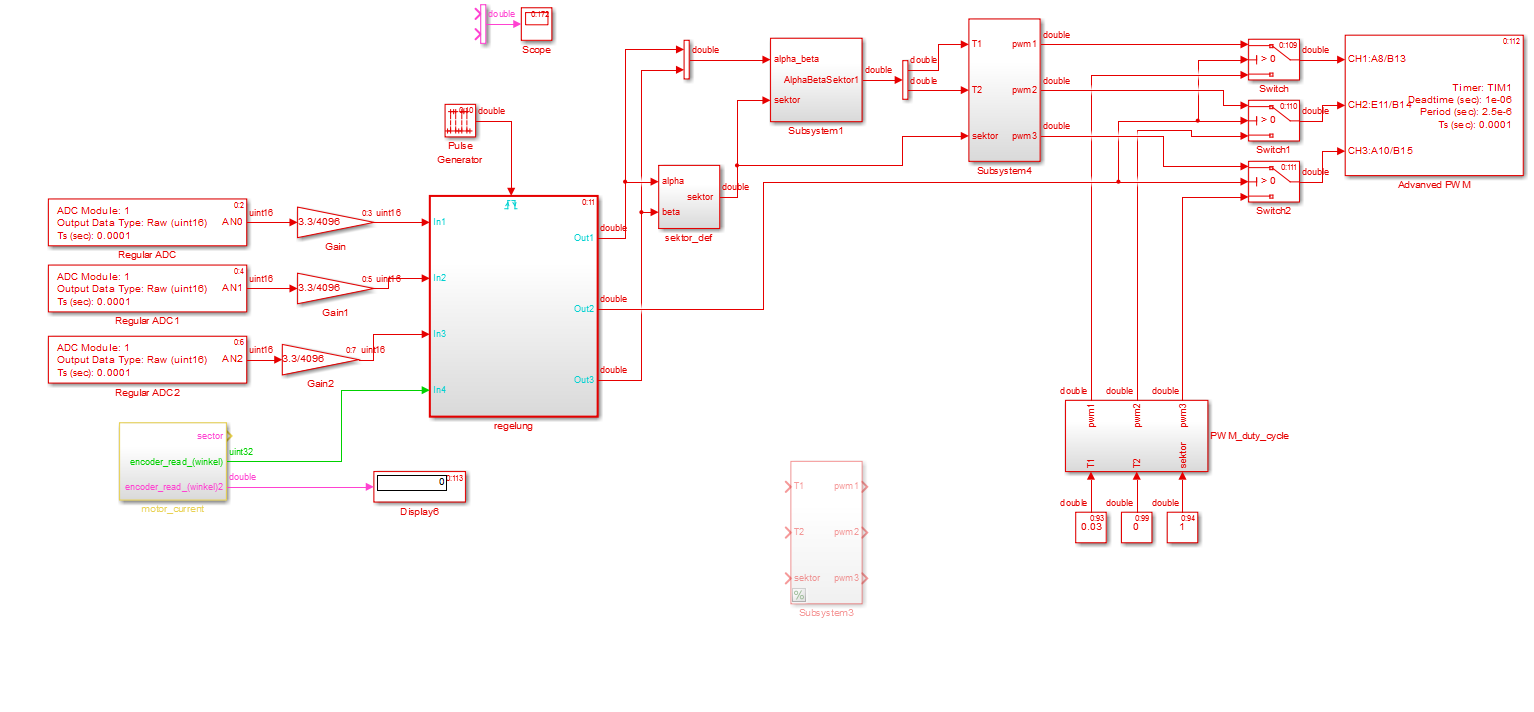
focand_svpwm.PNG
73 KB
Hi Alex, I am also trying to implement an application such as for AC induction motor. Could you solve the problem?
Hi, why do you need to give the absolute angle to the foc? You don`t need a sensor at all if you are using theese boards. With the voltage and current measurements of all three phases and some knowledge of the motor you are able to control it. Eka schrieb: > Hi Alex, > I am also trying to implement an application such as for AC induction > motor. Could you solve the problem? Go for the LAUNCHXL-F28027F and the BOOSTXL DRV8305 or DRV8301 (but I prefer the 8305. Seems to have the better ratings) With theese boards and the Motorware examples it is straight forward.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.