Hallo Leute, ich bin relativ neu in Sachen Microcontroller und Modellbau-/steuerung. Nun habe ich die Aufgabe ein Modellschiff mit einer klassischen RC-Steuerung (Sende+Empfänger etc.) auszustatten. Zudem soll das Schiff aber auch über eine zweite Funkverbindung über Microcontroller mit Hilfe von Funkmodulen steuerbar sein (ZigBee/Xbee Module). An der normalen RC-Fernsteuerung soll über einen Schalter zwischen den Steuerungen gewechselt werden können. Ich habe gelesen, dass die RC-Empfänger ein PWM-Signal zum Ansteuern der Regler bzw. Servos ausgeben. Der zu verwendende µc ist ein STM32 und nicht dazu geeignet, direkt Motoren etc. anzusteuern. Es wird also eine Art PWM-Modul benötigt, der über den µC die Leistungssteuerung übernimmt. Die Frage ist jetzt: Wie schalte ich zwischen diesen Steuerungen um? Natürlich kann man ein extra Schaltmodul für die RC-Steuerung kaufen, um die Spannung an einem Ausgang des Empfängers zu schalten. Dies könnte man nutzen, um über den Sender ein (PWM-?) Modul zu schalten. Das PWM-Modul würde dann je nach Schaltzustand entweder die Signale vom RC-Empfänger an die Servos weiterleiten oder die Steuersignale des µc zu gleichwertigen PWM-Werten verarbeiten und diese weiterleiten. Soviel zur Theorie Hat jemand Erfahrung in diesem Gebiet? Was für Bauteile würden hier helfen? Würde ein Mosfet-Schaltung genügen? Ratschläge bzgl. der Funkverbindung mit den µc (über XBee etc.) würden ebenfalls viel helfen. MfG Malik
RC Funkfernbedienungen machen PPM, nicht PWM. Lässt sich an dem Zigbee Ranz noch was machen? Mit nem ESP8266 wärst du zügig fertig. Nötige Reichweite? Das mit dem Umschalten könnte man so regeln, dass der uC auf dem Schiff einspringt sobald die Signale von der RC FFB ausbleiben. Dann ist dein Umschalter der Einschaltknopf der FFB.
Die Reichweite muss mindestens 100 m betragen. Außerdem sollen noch Sensorwerte (GPS- und Beschleunigungssensor) über den µC auf dem Schiff zum Bediener (am PC) gesendet werden. XBee schafft laut Hersteller 250 kbit/s und je nach Leistungsklasse über 100 m. Deine Idee zum Umschalten hört sich gut an, aber wie realisiere ich, dass die Motoren nach dem Umschalten Ihren Strom dann von der PWM-Schnittstelle nach dem µC bekommen? Im Endeffekt müssen ja beide Steuerungen ihre Leistungsleitungen kurz vor dem Motor zusammenlaufen lassen. Ein einfaches Zusammenlöten der Leistungsleitungen würde da ja nicht ausreichen oder?
Farming M. schrieb: > Die Reichweite muss mindestens 100 m betragen. Es gibt ESP Module mit Aufsteckdipol und an der Fernbedienung kann man ggf. ne Antenne mit etwas Gewinn verwenden aber bei nem Schiff ist Wlan dann doch nicht die beste Wahl. Ok, Zigbee it is. > Deine Idee zum Umschalten > hört sich gut an, aber wie realisiere ich, dass die Motoren nach dem > Umschalten Ihren Strom dann von der PWM-Schnittstelle nach dem µC > bekommen? Die PWM Schnittstelle ist die Motortreiber-Platine nehme ich an? Einfach: Der uC sendet keine eigenen Informationen an die Treiberplatine solange der RC-Empfänger dies tut. Das ist ein uC, dem kannst du Logik mitgeben! Den kannst du sogar als Failsave 10min im Kreis oder ans nächste Ufer fahren lassen! Umschalten entweder in Software (uC schleift RC Empfänger Informationen einfach durch) oder Hardware (Analog Mux). Feststellen wann der RC Empfänger nichts mehr empfängt ist einfach: Mach die FFB aus und analysiere, was dann am RCE ankommt. Das programmierst du dem uC dann ein. Frage ist jetzt, ob der uC Single point of failure sein darf. Oder anders gesagt: Ist Redundanz der Zweck der ganzen Geschichte?
Da Arbeitszeit auch Geld kostet und für den Fall, dass das Basteln der Elektronik das Ziel des Projektes ist, würde ich was aus dem ArduPilot Bereich vorschlagen. Zum Beispiel die Box hier (kann mit Telemetriemodem und RC Empfänger verbunden werden): http://ardupilot.org/rover/docs/common-pixhawk-overview.html#common-pixhawk-overview Telemetriemodems: http://ardupilot.org/rover/docs/common-telemetry-landingpage.html Dazu eine Fernbedienung mit dreistufigen Schalter: Position 1: Daten der Fernsteuerung werden direkt an Motor/Servo durch gereicht Position 2: Daten der Telemetrieverbindung gehen an den Motor/Servo Position 3: (Optional) Autopilot, zum Beispiel mit GPS programmierten Pfad abfahren. So etwas benutze ich mit einem Quadcopter, aber im 'Rover'-modus steuert die Box auch ein Auto/Boot. Der erste Testaufbau ist in einer Stunde zusammen gesteckt, und die Software (Windows/Linux/Android) ist auch schon fertig, man braucht aber etwas um sich da rein zu Fuchsen, wenn man fortgeschrittenen Dinge wie Autopilot nutzen möchte. Wie gesagt, kann mehr, ist teurer, aber dafür quasi fertig und erfüllt die Anforderungen. Aber natürlich langweiliger als es selber zu bauen. Thomas
> Die PWM Schnittstelle ist die Motortreiber-Platine nehme ich an? Das Board STM32F411E-DISC0 kann PWM-Signale erzeugen, ich muss jedoch noch prüfen ob es 4 PWM-Ausgänge hat (2x Hauptmotoren, 1x Querstrahlruder, 1x Hauptruder). Außerdem ist die Frage, ob die PWM-Signale kompatibel mit denen aus dem Modellbau sind. (Das PPM ist ja zwischen Sender und Empfänger und die PWM zwischen Empfänger und Regler (50Hz mit Pulsweiten von 1 - 2 ms)) Ist dies nicht der Fall muss noch eine Schaltung zur Anpassung dieser Signale her. > Frage ist jetzt, ob der uC Single point of failure sein darf. Oder > anders gesagt: Ist Redundanz der Zweck der ganzen Geschichte? Das ist eine sehr gute Frage, die ich noch klären muss. Vorab kann ich sagen, dass die Steuerung über den µC notwendig ist für spätere Projekte am Schiff. Die RC-Fernsteuerung rettet das Schiff bei nicht ausreichender Reichweite, aber ob eine Redundanz bezogen auf Bauteilausfall ebenfalls Zweck ist, weiß ich noch nicht. Ich melde mich sobald ich eine Antwort geben kann. Ansonsten schonmal vielen Dank, ihr seid echt hilfreich :)
Farming M. schrieb: > Ist dies nicht der Fall muss noch > eine Schaltung zur Anpassung dieser Signale her. Die Schaltung nennt sich Mikrocontroller.
> Frage ist jetzt, ob der uC Single point of failure sein darf. Oder > anders gesagt: Ist Redundanz der Zweck der ganzen Geschichte? Hab nochmal mit meinem Prof geredet. Er fände eine Redundanz besser. Wenn also der µC ausfällt, soll das Schiff über die RC-Fernsteuerung noch kontrollierbar sein. Das beißt sich meiner Meinung nach mit den Ansätzen, die Signale vom Empfänger einfach durch den µC durchschleifen zu lassen. Oder seht ihr da Alternativen?
THOR schrieb: > Farming M. schrieb: >> Ist dies nicht der Fall muss noch >> eine Schaltung zur Anpassung dieser Signale her. > > Die Schaltung nennt sich Mikrocontroller. es geht darum, dass der µC nicht so hohe Spannungsamplituden modulieren kann weshalb die Signale noch verstärkt werden müssen.
Farming M. schrieb: > Hab nochmal mit meinem Prof geredet. Er fände eine Redundanz besser. > Wenn also der µC ausfällt, soll das Schiff über die RC-Fernsteuerung > noch kontrollierbar sein. Nun, Fernbedienung und uC können die Servos und Motoren nicht gleichzeitig befehligen, da muss schon eine Art der Umschaltung drin sein, die, wenn der uC aktiv ist, die Signale der Fernsteuerung unterdrückt. Wenn der uC aber nun ausfällt, und den Umschalter so stehen lässt, funktioniert immer noch keine Fernbedienung. Da müsste dann ein Umschalter mit Ausfallerkennung rein. Kann man bauen, aber wenn die dann auf grund ihrer Komplexität ausfällt (obwohl Fernbedienug und uC weiterhin funktioneren) hat man dasselbe Problem wieder. Einfacher wäre es zu sagen: Wenn die XBee/Bluetooth Verbindung ausfällt, schaltet der sowieszu zuverlässig immer funktionierende uC auf Fernbedienung (und umgekehrt). Denn Funkverbindungen sind das störbare Problem, nicht uC. Nun denn, ein uC/FB Multiplexer:
1 | Multiplexer wie CD4051 |
2 | +---+ |
3 | FB Impuls ---------------|a | |
4 | | x|--- Servos |
5 | uC Impuls -----+---------|b | |
6 | | +---+ |
7 | | | |
8 | | +----+ |a/b |
9 | | | | | |
10 | +---|> Q|--+ |
11 | | | |
12 | +----+ |
13 | 50mS MonoFlop wie 74HC123 |
Wenn man nur eine Fernbedienung mit eingebauten Decoder hat, braucht man die Shcaltung für jeden Servo ein mal. Hat man eine Fernbedienung mit getrenntem Decoder, braucht man die Schaltung nur ein mal und nutzt den Decoder für beide.
Angehängte Dateien:
-

Schaltprinzip.png
4,3 KB
> > Einfacher wäre es zu sagen: Wenn die XBee/Bluetooth Verbindung ausfällt, > schaltet der sowieszu zuverlässig immer funktionierende uC auf > Fernbedienung (und umgekehrt). Denn Funkverbindungen sind das störbare > Problem, nicht uC. > > Nun denn, ein uC/FB Multiplexer: >
1 | > Multiplexer wie CD4051 |
2 | > +---+ |
3 | > FB Impuls ---------------|a | |
4 | > | x|--- Servos |
5 | > uC Impuls -----+---------|b | |
6 | > | +---+ |
7 | > | | |
8 | > | +----+ |a/b |
9 | > | | | | |
10 | > +---|> Q|--+ |
11 | > | | |
12 | > +----+ |
13 | > 50mS MonoFlop wie 74HC123 |
14 | |
15 | > |
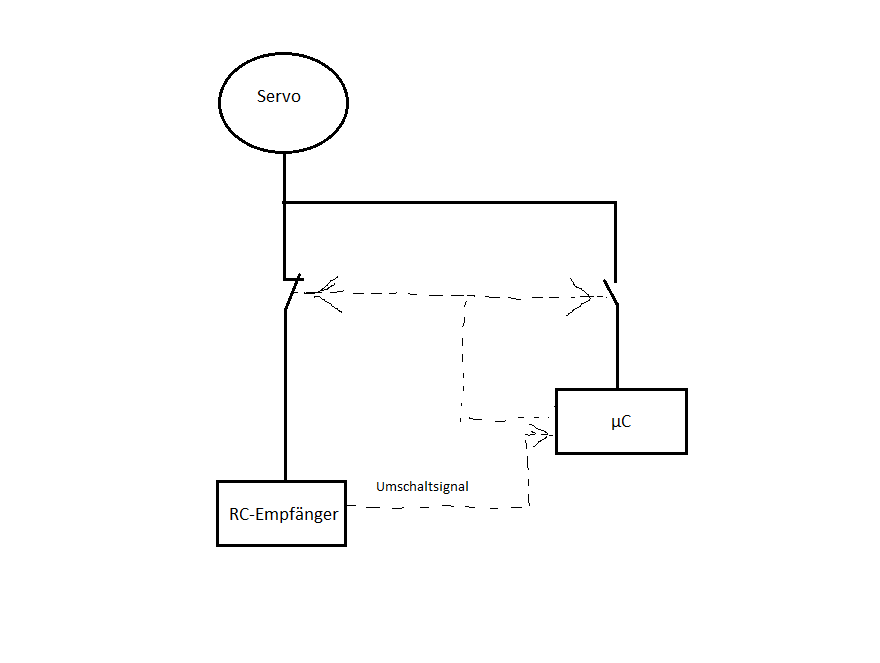
Der µC sendet also ständig Impulse die den Monoflop retriggern bzw. sein Signal aufrechterhalten, damit dieser den Multiplexer dazu bringt, immer Kanal b zu nutzen? Und bei Entfall des µC würde der Multiplexer immer auf Kanal a springen durch welchen Effekt? Speziell mit diesen Bauteilen kenne ich mich nicht aus, weshalb ich nachfrage. > Wenn man nur eine Fernbedienung mit eingebauten Decoder hat, braucht man > die Shcaltung für jeden Servo ein mal. Hat man eine Fernbedienung mit > getrenntem Decoder, braucht man die Schaltung nur ein mal und nutzt den > Decoder für beide. Ich habe gelesen, dass der Decoder für die Erzeugung der Kanalimpulse nacheinander zuständig ist. Aber wie genau soll ein getrennter Decoder die Schaltung vereinfachen? Könntest du das bitte etwas näher erläutern? Ansonsten habe ich mal einen eigenen Entwurf hochgeladen. Könnte man nicht theoretisch einfach Öffner und Schließer nehmen, die gleichzeitig betätigt werden vom µC? MfG Malik
Farming M. schrieb: > durch welchen Effekt Abgelaufene Zeit des MonoFlop. Farming M. schrieb: > wie genau soll ein getrennter Decoder die Schaltung vereinfachen? Du brauchst sie dann nur 1 x Farming M. schrieb: > Ansonsten habe ich mal einen eigenen Entwurf hochgeladen Da das Umschalttsignal durch den uC geht, würde bei ausgefallenem uC das Umschalten hängen bleiben. Da kann man gleich das Servosignal durch den uC leiten.
Michael B. schrieb: > Farming M. schrieb: >> durch welchen Effekt > > Abgelaufene Zeit des MonoFlop. > > Farming M. schrieb: >> wie genau soll ein getrennter Decoder die Schaltung vereinfachen? > > Du brauchst sie dann nur 1 x ich meinte eher den physikalischen Effekt. Wie kommt es zur Vereinfachung? > Da das Umschalttsignal durch den uC geht, würde bei ausgefallenem uC das > Umschalten hängen bleiben. Da kann man gleich das Servosignal durch den > uC leiten. Wenn die Öffner bzw. Schließer bei Ausfall des µC wieder in ihre Ausgangsposition fallen, ist ja nurnoch die Leitung vom Empfänger zu den Servos gegeben. Müsste doch funktionieren?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.